交叉跑道機場目視條件下航空器碰撞風險分析
2021-11-23 03:39:06張瑗晉朱代武
科技和產業 2021年11期
關鍵詞:模型
張瑗晉, 朱代武
(中國民用航空飛行學院 空中交通管理學院, 四川 廣漢 618307)
在民航發展的大背景下,許多機場的容量逐漸達到飽和狀態。為了緩解航空交通壓力和促進空中交通流量安全發展,國內一些大型機場已經開始采用新興的交叉跑道的方式來提高跑道運行效率。為此,在目視條件下發揮飛行員作為運行終端的主觀能動性,實現增加飛行流量、降低管制員工作負荷、增加塔臺管制區容量的目的。
1 成都新機場的跑道構型與運行模式
國外使用交叉側向跑道構型的大型機場主要有日本東京羽田、美國芝加哥奧黑爾、美國達拉斯、美國丹佛機場、美國夏洛特、美國休斯敦和美國拉斯維加斯機場[1]。交叉跑道能靈活地應對地面對強側風的影響,使往不同方向去的飛機可在跑道不同方向起降,增加緩沖長度,從而提高機場容量,加快飛行流量。所以在交叉跑道占用的空間位置范圍中,研究目視飛行條件下航空器所在位置的碰撞風險至關重要。
北京大興國際機場是國內首次使用交叉跑道的機場,成都天府國際機場則是國內第二個使用交叉跑道構型的機場。其中01/19、02/20、11跑道同時運行,全天24 h開放,跑道運行模式是:01/19 和 02/20 跑道半混合運行,采用隔離平行運行、獨立平行離場,11跑道僅用于由西向東起飛[2-3]。本文僅討論一期工程中的北一跑道(11)和東一跑道(02/20)之間目視條件下的航空器碰撞風險。如圖1所示,北一跑道長3 800 m,寬45 m,東一跑道長3 200 m,寬45 m。北一跑道西側延長垂直于東一跑道的北側延長線,兩跑道頭互不重疊。北一跑道的中心線距東一跑道頭1 430 m,東一跑道中心線距北一跑道340 m。為了提高管制的便捷性,減少航空器運行中的沖突,當北一跑道用于向東起飛,東一跑道僅用于降落,隔離運行下且不考慮復飛概率,考慮北一跑道(11)與東一跑道(02/20)運行的相關性,北一和東一交叉跑道處在獨立運行,在此種模式下的管制運行相對更加安全[4]。
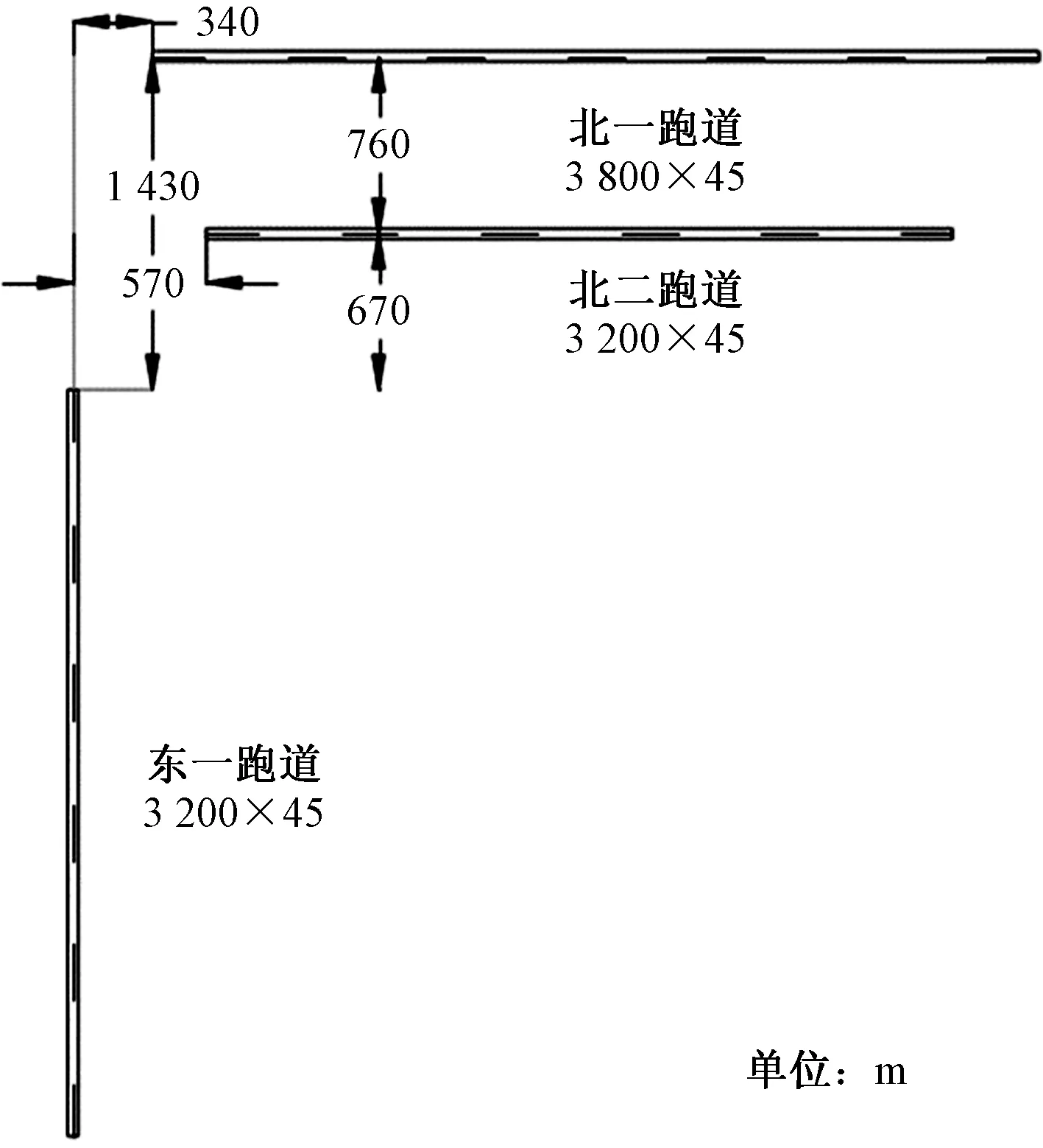
圖1 成都天府國際機場跑道構型圖
2 基于目視條件下的碰撞因子的確定
目視飛行是最直接和最安全的飛行方式,每個飛行員最先接觸到的飛行基本操作方式都是建立在目視條件下的。因為目視條件下帶給飛行員的判斷影響因素有很多,導致基于目視條件下的碰撞因子也比較復雜。目視條件下的飛行過程雖然是最安全的飛行方式,但同時帶來的影響因素也因環境和人為影響的變化而不斷變化。由于各種因素的影響,目視條件下的碰撞風險也由影響因素而加大,碰撞因子也會隨之變化從而產生無法避免的誤差。因此,目視飛行和各種外在條件存在的誤差即碰撞因子,這都會直接影響航空器與航空器之間的安全間隔,從而帶來碰撞風險。
若兩架航空器在目視條件下起飛和降落時,可以通過目視跟進或者保持與航空器持續能見的方式來建立,那么在交叉跑道中的碰撞風險則是不可避免的。當航空器目視運行過程中,兩航空器之間在目視空間位置上有發生重疊的可能性和碰撞風險性。為了使航空器的安全得到保障,航空器在空中運行時,其所占用的空間尺寸比航空器原始空間大得多才能避免風險。通過計算目視條件下兩航空器之間的碰撞風險值大小,得到航空器在不同位置隨運動時間變化的碰撞風險概率,從而避免兩航空器之間有可能發生的空中碰撞。由于目視條件下的航空器碰撞風險影響因素比較多,如跑道長度,航空器的高度、速度、位置,目視精度、時間,轉彎半徑和轉彎率等,具體目視飛行條件下的碰撞風險模型參數見表1。
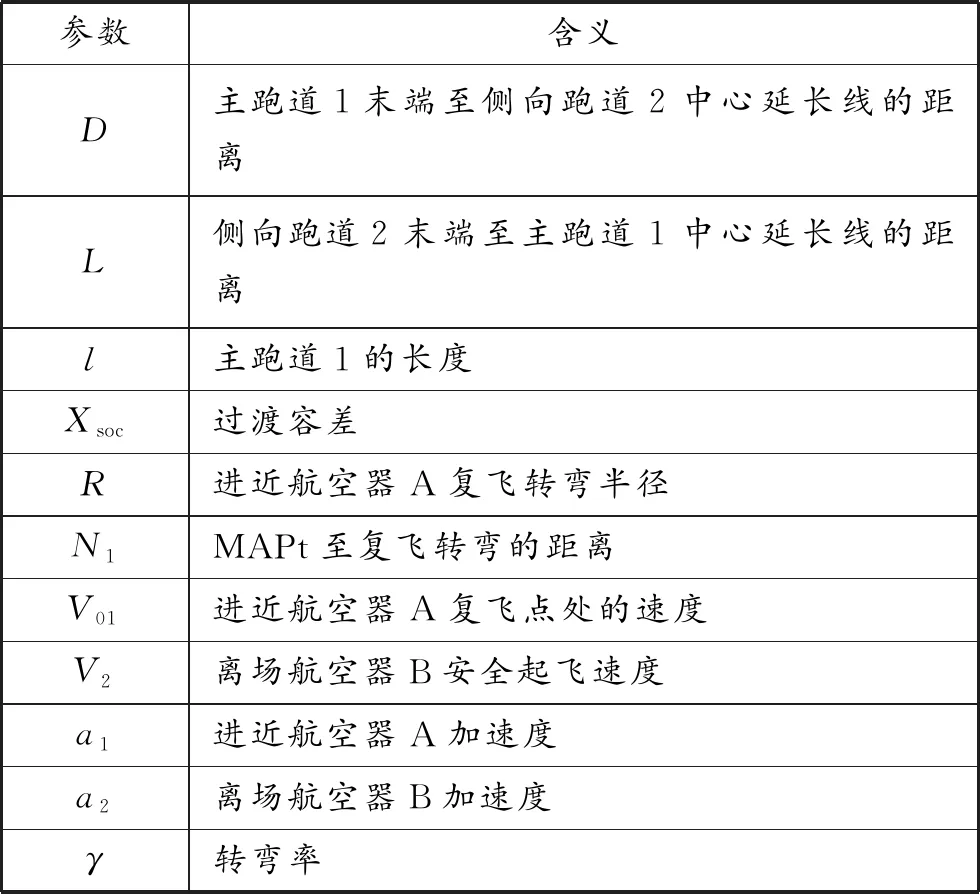
表1 目視碰撞風險模型參數
結合目視飛行條件下的兩航空器運行狀態,按照兩航空器的危險接近程度分別將兩航空器相撞和危險接近這兩個距離值作為計算航空器碰撞風險的積分上下限[5-11],即計算航空器進入危險接近直到相撞的概率建立基于位置誤差碰撞風險模型:

(1)
式中:P(t)表示在t時刻兩航空器之間的碰撞風險概率;fD(x)表示兩航空器實際距離的概率密度函數;d表示兩航空器之間的碰撞距離,即當兩航空器之間的距離在-d到d之間則表示兩航空器發生碰撞。
3 目視條件下的交叉跑道碰撞風險模型
在目視飛行條件下兩航空器的碰撞風險大小主要是由于兩機之間實際的位置距離產生,建立基于航空器位置誤差模型的碰撞風險模型,暫不考慮航空器的尾流影響。以成都天府機場為例,如圖1對新機場一期工程的02/20(東一)與11(北一)兩條交叉跑道上航空器A和航空器B在進離場的運動過程,在目視條件下將上述碰撞風險模型細分成基于位置誤差的縱向和側向碰撞風險模型。在主跑道1上進近復飛的航空器A的航跡有可能穿越側向跑道2的離場航跡或者靠近側向跑道2,航空器A和航空器B實際相對位置隨時間變化。根據跑道運行方向,分別對主跑道1 (02/20)和側向跑道2(11)建立碰撞風險模型。
上述基于位置誤差的縱向和側向風險模型公式為
(2)
(3)
P(t)=Px(t)×Py(t)
(4)

02東一跑道上航空器A北向起飛,11北一跑道上航空器B東向離場,兩架航空器的縱向、側向實際距離隨時間變化的函數如下:

Lx(t)=D+l-V01t
(5)
(6)
(7)
(8)

(9)
(10)
4 碰撞風險計算結果分析
結合仿真計算在目視飛行條件下航空器A在02/20跑道起飛,航空器B在11跑道同時起飛的碰撞風險概率。在指揮時將離場航空器與進場航空器充分分開,同時確保離場航空器在起飛時,進場航空器不會因為著陸失敗而復飛,從而導致兩航空器之間發生航跡交叉的風險[12-14]。如果此時航空器A和航空器B碰撞風險概率滿足ICAO公布的可接受安全目標水平,則當前運行模式和位置誤差模型可接受。通過計算結果分析在不使用上述提到的位置誤差模型時,當航空器A在東一(02/20)跑道起飛,與航空器B在北一(11)跑道離場過程中碰撞風險仿真結果約為0.011 3次/飛行小時,如圖2所示,其風險值遠大于ICAO公布的安全目標水平5×10-9次/飛行小時,即該運行模式不可接受[15]。
圖2 航空器A和航空器B碰撞風險
使用本文建立的目視飛行條件下的位置誤差模型后,得到的兩航空器碰撞風險如圖3所示,約為4.72×10-9,滿足ICAO公布的安全目標水平,驗證了在目視條件下該模型的可行性。
圖3 使用位置誤差模型后航空器A和航空器B碰撞風險
5 結語
由計算結果得知,東一(02/20)與北一(11)跑道碰撞風險遠小于精密進近航空器與障礙物碰撞的危險概率的安全目標。航空器A和航空器B在目視飛行并同時隨著位置變化的這一個碰撞因子的條件下,將計算數值進行對比分析碰撞風險概率滿足ICAO公布的可接受安全目標水平5×10-9次/飛行小時。在交叉跑道實施目視飛行條件下可以達到更安全、更準確的操縱方式,可以加速飛行流量、降低管制員工作負荷、提高機場運行效率和適航性、減少機場延誤以及增加機場跑道的容量。
后續可進行以下兩個方面的優化:①優化目視條件下航空器碰撞風險模型的參數,找出多個影響碰撞風險概率的碰撞因子并進行仿真計算,對比分析碰撞風險的計算結果;②根據FAA提出劃設側向跑道進場保護區域(arrival-departure window ADW)的方法,基于位置誤差模型建立側向跑道ADW可以幫助管制員在指揮離場航空器和進場航空器同時運行時滿足最低安全標準的要求,從而降低進離場航空器之間的碰撞風險。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19