基于滑模鎖相環永磁同步電機無傳感器控制動態性能改進
2021-11-22 04:26:06王金柯
電機與控制應用 2021年10期
關鍵詞:結構
王金柯, 高 強
(上海交通大學 電子信息與電氣工程學院,上海 200240)
0 引 言
永磁同步電機(PMSM)具有功率密度高、體積小、效率高等優點,已成為現代電力驅動重要的一部分,在電梯、壓縮機、伺服電機、航空航天、船艦、新能源汽車等領域得到了廣泛的應用[1-2]。在矢量控制下,永磁電機具有良好的控制性能,但需要知道轉子位置。光電編碼器、旋轉變壓器等機械傳感器的安裝,不僅增加了電機結構的復雜性和電機的成本,也降低了系統的可靠性,為此,基于無位置傳感器的控制驅動算法也成為了國內外研究的一大熱點[3]。
然而在實際運行系統中,電機時刻受到快速變化的負載、逆變器損耗、磁飽和等其他非線性因素的影響。在這種情況下,無位置傳感器控制的性能和穩定性會大大降低,這也成為了無位置傳感控制的主要弱點。鑒于此,眾多學者在提高無速度傳感控制的精度和帶寬上做了大量研究。文獻[4-5]通過補償逆變器的非線性效應來減少位置估計誤差。文獻[6]提出了一種去耦自適應觀測器,其估計轉子速度和位置由q軸和d軸的電流估計誤差獨立且同時調節,從而減小了位置估計誤差。文獻[7]討論了通量估計和基于擴展電動勢(EEMF)的估計以提高估計精度。文獻[8]基于使用狀態濾波器對靜止參考框架中EMF進行估計,通過使用參考轉矩作為觀測器的前饋輸入,提出了具有改進帶寬的零相位滯后估計器。文獻[9]通過對轉子位置和速度誤差的獨立估計,消除負載擾動的影響增強了觀測器的動態性能和魯棒性。文獻[10]采用二階廣義積分器代替帶通濾波器且其中心頻率隨轉速信息實現自適應改變,有效提高了轉子位置的辨識精度和系統動態性能。文獻[11]提出了一種三階超扭曲擴展狀態觀察器(STESO),以增強內置式PMSM的位置和速度估計的動態性能。利用高階擴展狀態和超扭曲算法,可以在STESO中實現快速收斂和擾動估計。然而上述方法參數眾多整定困難,且計算較為復雜。
同步坐標系鎖相環(SRF-PLL)是一種較為常見的鎖相方式,具有控制方法簡單、響應速度快等優點。但當電機進行加減速運行的情況下,即使轉速可準確估計,轉子位置依舊存在滯后誤差,且加速度越快,誤差越大[12-13]。鑒于此,文獻[14]使用三階三類PLL,通過合理配置PLL系統零極點改善了轉子位置估計的動態響應性能,消除了電機轉速斜坡變化時轉子位置估計誤差。文獻[15]提出了一種快速檢測相角變化的方法,并將其用于改善廣義延遲信號消除(GDSC)PLL的性能,從而能夠將PLL設置較寬的帶寬以實現快速的角度估計。文獻[16]提出了一種用于二階PLL(Type-2 PLL)的單位延遲補償方案,以消除頻率斜坡期間的穩態相位角誤差。文獻[17]提出了一種增強型的PLL(E-PLL),該方法在PLL的鑒相環節(PD)使用了自適應濾波器和簡單的正弦乘法器,然而自適應濾波引入延遲,反過來又提供了一個緩慢的動態性能。二階通用積分器PLL(SOGI-PLL)可以通過使用2個自適應權重來改善E-PLL的瞬態性能。然而,這引入了額外的計算負擔[18]。上述的PLL系統可以等效為非線性低通濾波器(LPF),一方面LPP降低了動態響應性能,另一方面非線性因素造成了非線性動態響應問題[19]。
為了解決此問題,本文提出了一種新的基于滑模的改進PLL結構來增強系統的動態響應能力。滑模變結構本質是一種特殊的非線性控制策略,因其對擾動與對象參數不敏感,且動態響應能力強,現已廣泛運用于現代控制系統中。該方法的缺點在于當狀態軌跡到達滑模面后, 難于嚴格地沿著滑模面向著平衡點滑動, 而是在滑模面兩側來回穿越,從而產生抖動。文獻[20]中介紹了大量關于抖振消除的措施從而使滑模控制廣泛應用成為可能。目前也有少量文獻將滑模結構應用于PLL中,文獻[21]將SRF-PLL中的PI替換為符號函數,從而實現變結構控制。文獻[22]使用自適應滑模觀測器對PLL進行了改進,但是收斂時間取決于觀測器的動態性能。
在上述文獻的基礎上,本文提出了一種新型的基于滑模的改進PLL結構。該方法既保留了PLL良好的穩態特性,又對其動態性能進行了改進,使其具有更快的動態響應能力和良好的魯棒性能。該方法無需電機參數,參數整定簡單,易于在三相逆變控制中進行推廣。
1 變結構系統
變結構系統最具有吸引力的地方是能將多個子系統聯系起來,從而構建一個能利用每一結構良好特性的總系統結構[23]。
考慮一般的非線性系統:

(1)
式中:x∈Rn,u∈Rm,t∈R分別為系統的狀態,控制和時間變量。
確定切換函數向量:
s(x,t),s∈Rm
(2)
向量具有的維數一般為控制的維數,求解變結構控制函數:

(3)
2 高頻脈振方波注入控制算法
為了準確估計PMSM轉子位置,首先建立估計轉子同步坐標系與實際轉子同步坐標系的關系,如圖1所示。
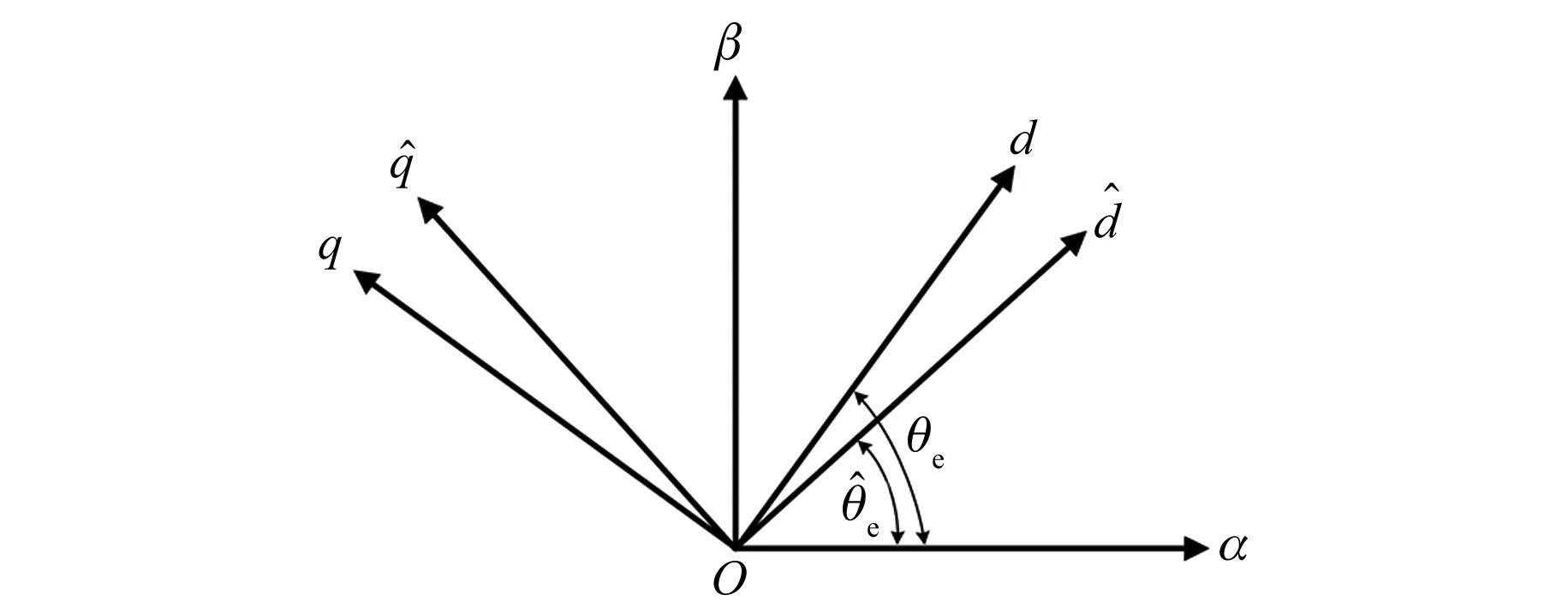
圖1 坐標軸關系示意圖


(4)
列寫同步坐標系下的電壓方程:
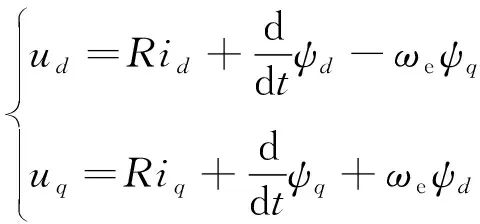
(5)
定子磁鏈方程為
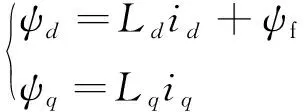
(6)
式中:ud、uq分別為PMSM定子電壓d、q軸分量;id、iq分別為PMSM定子電流d、q軸分量;Ψd、Ψq分別為定子d、q軸磁鏈;Ψf代表永磁體磁鏈;ωe為電角速度;R為定子電阻。
當電機以零速或低速運行時可忽略反電動勢,并將式(6)代入式(5)得到高頻模型下的定子電壓方程:
(7)

(8)
將式(8)代入式(7)并將同步坐標系中電流轉化為靜止兩相坐標系的電流,即:
(9)
式中:T(θe)2r/2s為反Park變換。

圖2 旋轉坐標下電壓方波注入
(10)
式中:Vdh是d軸高頻脈振電壓信號的幅值;D為方波信號占空比,D=0.5。
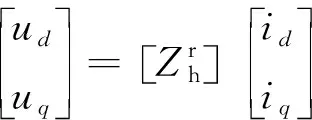
將式(10)代入式(9)得到估計同步坐標系下電壓與靜止兩相坐標系下電流的關系:

(11)

將式(11)離散化[24],可得:
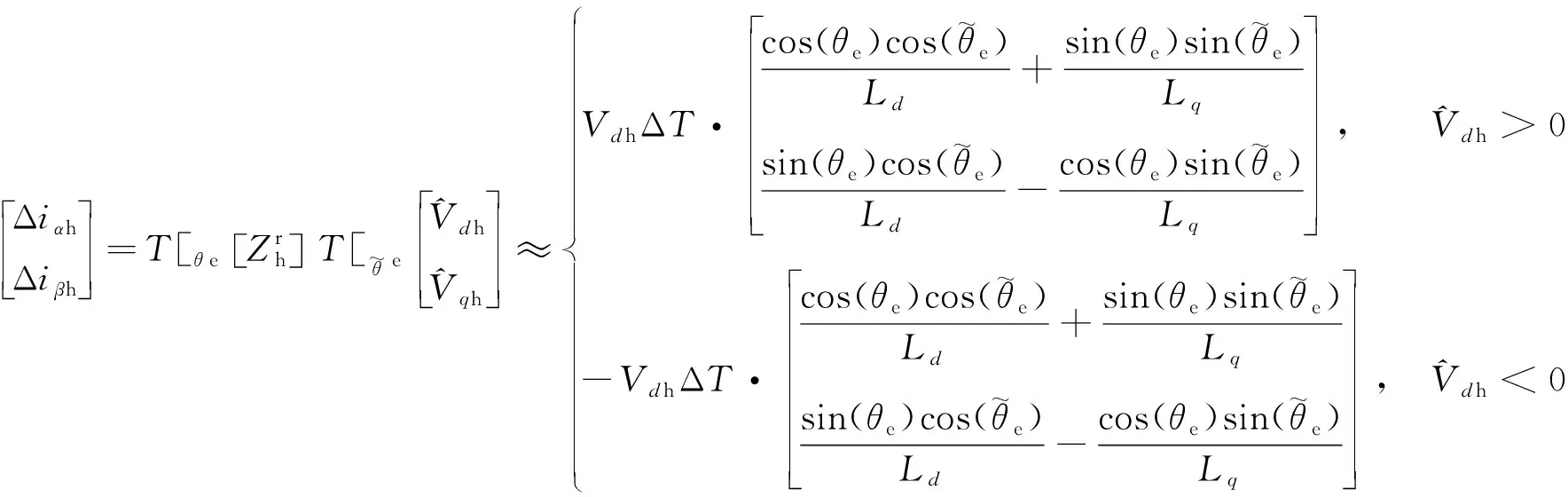
(12)
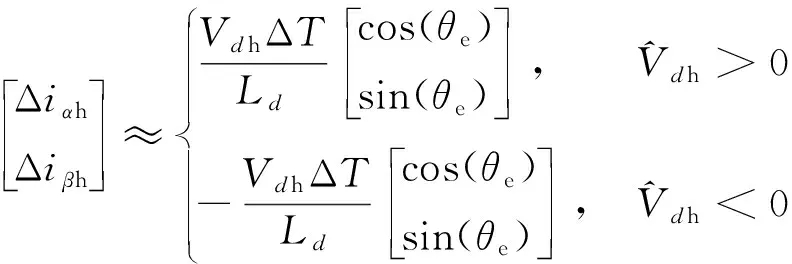
(13)
此時,轉子電角度可表示為θe=arctan(Δiαh/Δiβh)。然而由于反正切函數容易受到外界干擾,為了更好控制性能通常使用PLL系統來提取轉子的位置信息。
3 傳統N階PLL位置跟蹤策略
將在兩相靜止坐標系提取的Δiαh,Δiβh轉換到估計同步坐標系中,可得:
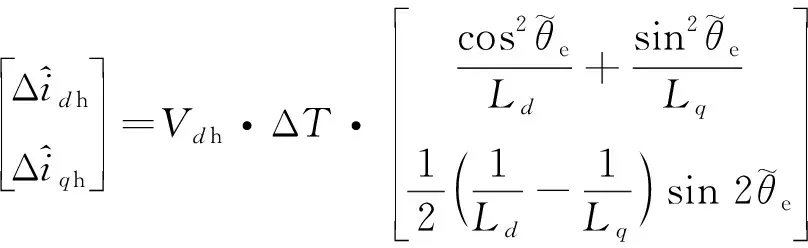
(14)

(15)
式中:Kn=Vdh·ΔT·(1/Ld-1/Lq)。

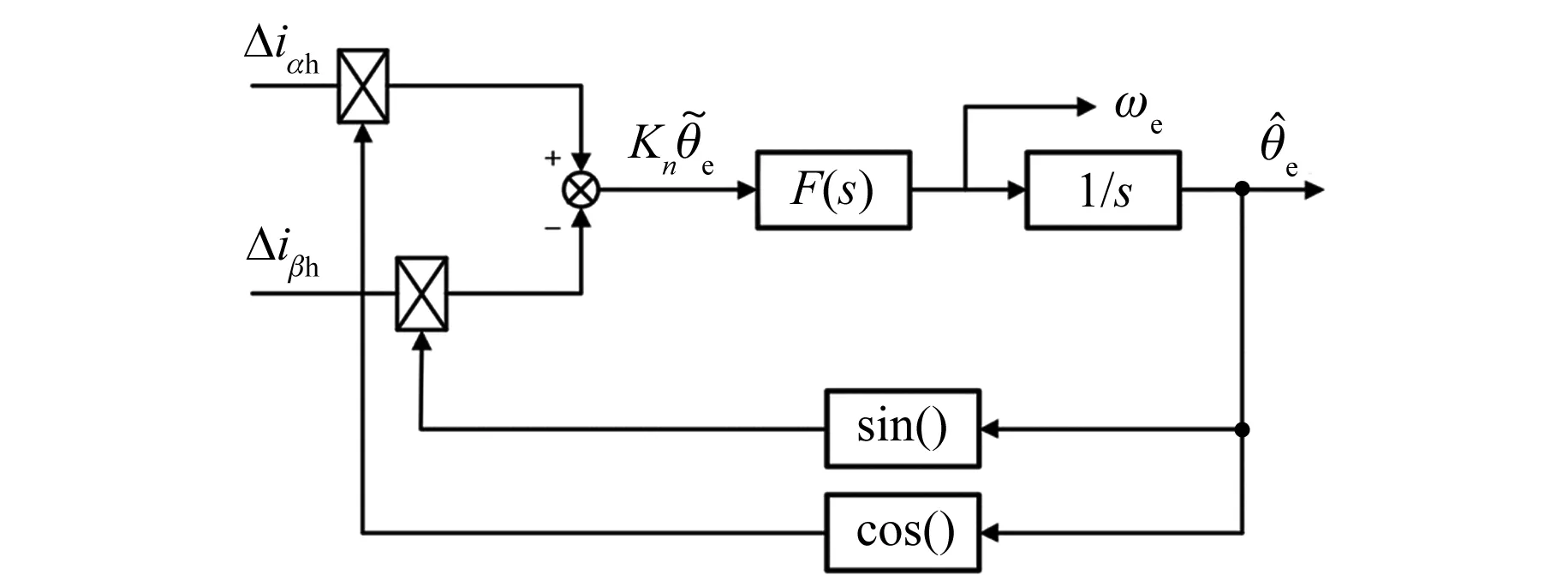
圖3 基于PLL的速度和位置觀測器結構框圖
圖3的等效框圖如圖4所示。

圖4 PLL的等效框圖
圖4中,F(s)計算式為

(16)
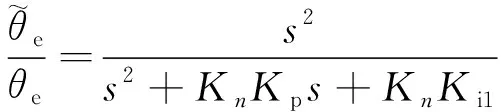
當m=1時即為二階PLL結構,PLL的閉環傳遞函數為
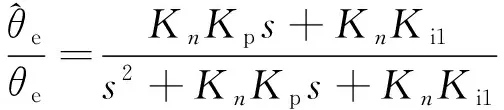
(17)
穩態誤差傳遞函數為
(18)
當電機穩態恒轉速運行時,θe是一個理想的斜坡函數,此時PLL的穩態誤差為

(19)
即電機在穩態運行時,PLL可以做到零誤差跟蹤位置信息θe。當電機以固定加速度進行加減速時,設加速度為Kj,此時PLL的穩態誤差為
(20)
當m=2時即為二階PLL結構,可推得當電機以固定加速度進行加減速時,PLL的穩態誤差為

(21)

4 基于滑模改進的PLL結構
為了更好地解決傳統PLL的一系列問題從而提高系統的穩定性與動態響應能力,本文提出了一種基于滑模的改進PLL結構。

(22)
式中:ε為滑模增益系數。
通過理想PLL可得到:

(23)
基于式(23)可得:

(24)
為考察上述收斂情況,選取Lyapunov函數V=S(X)TS(X)/2,要求:

(25)

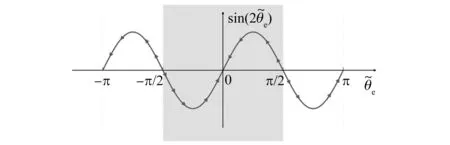
圖5 對于輸入為的收斂區間
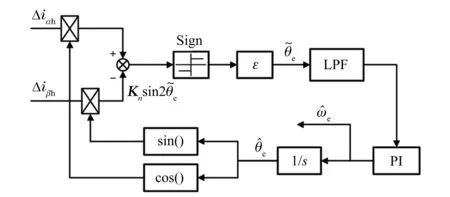
圖6 基于滑模的改進PLL實現框圖
5 仿真結果
為驗證方法的準確性和有效性,在試驗前使用MATLAB/Simulink進行了仿真驗證。
仿真中所采用的電機參數與試驗一致,其中電機仿真參數如表1所示。仿真與試驗中的開關頻率為5 kHz,采樣頻率與開關頻率相同為5 kHz。為取得較好的動態響應能力,注入方波頻率為1/2倍的載波頻率即2.5 kHz。方波電壓注入幅值太低,導致信噪比過低,易使系統失穩,過高則影響電機運行性能,在本文的仿真中注入電壓為35 V。
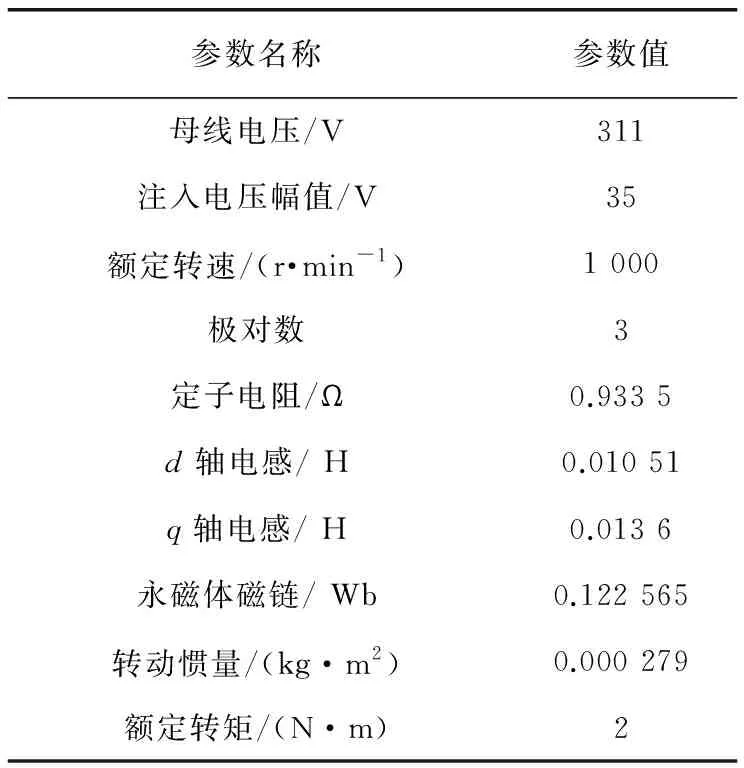
表1 仿真PMSM參數

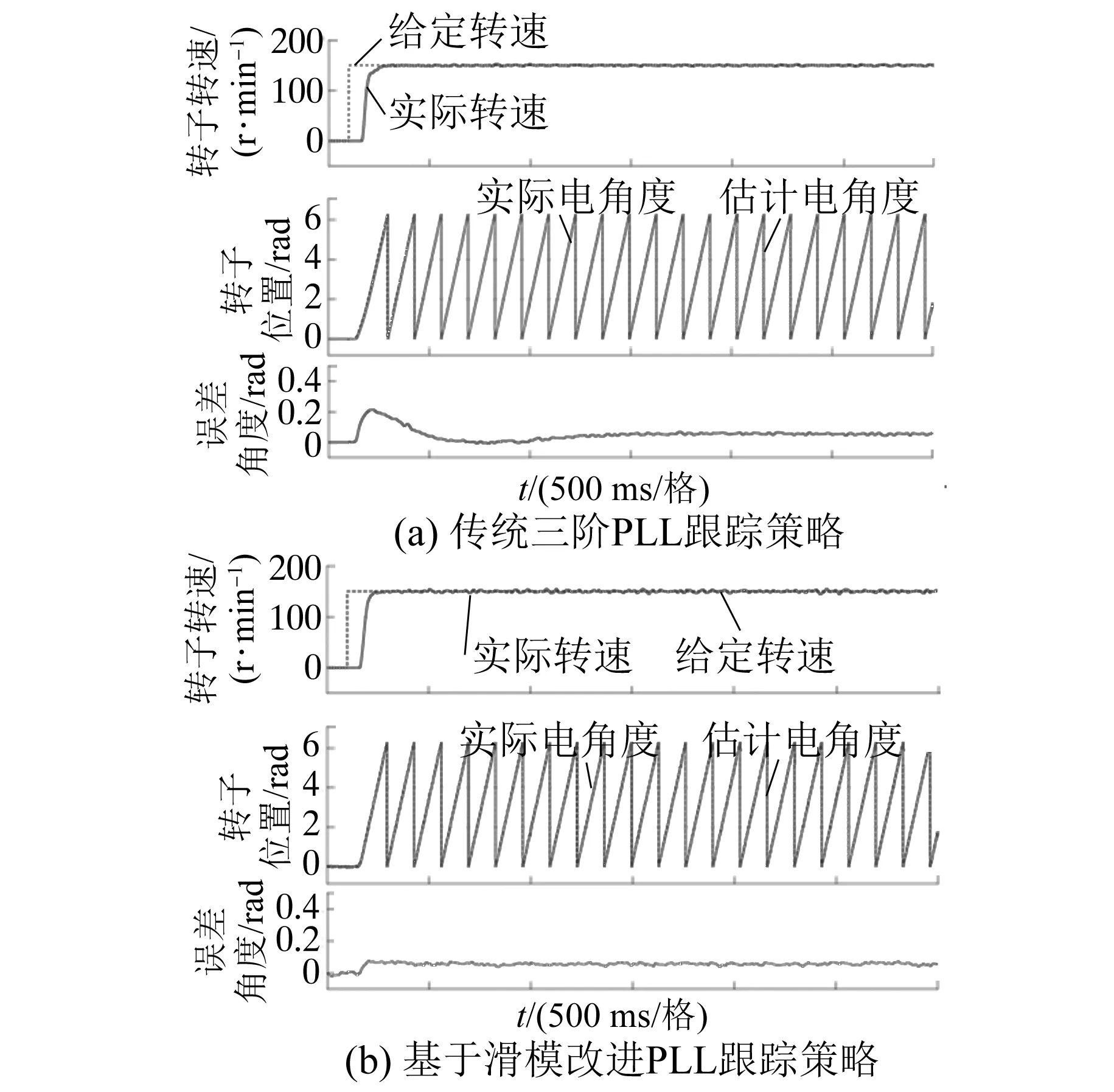
圖7 額定負載下電機階躍起動對比

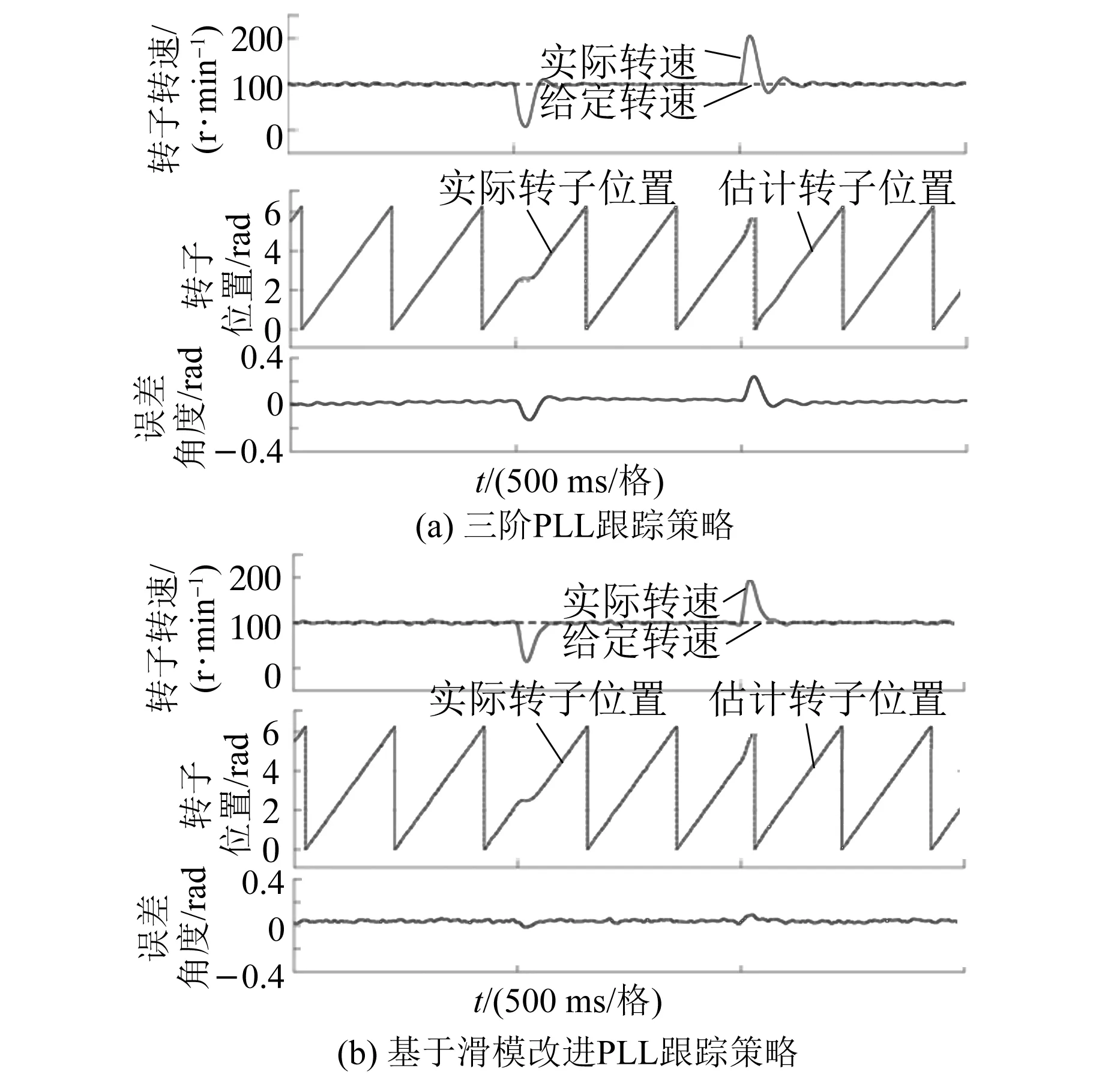
圖8 突加突卸額定負載對比仿真波形

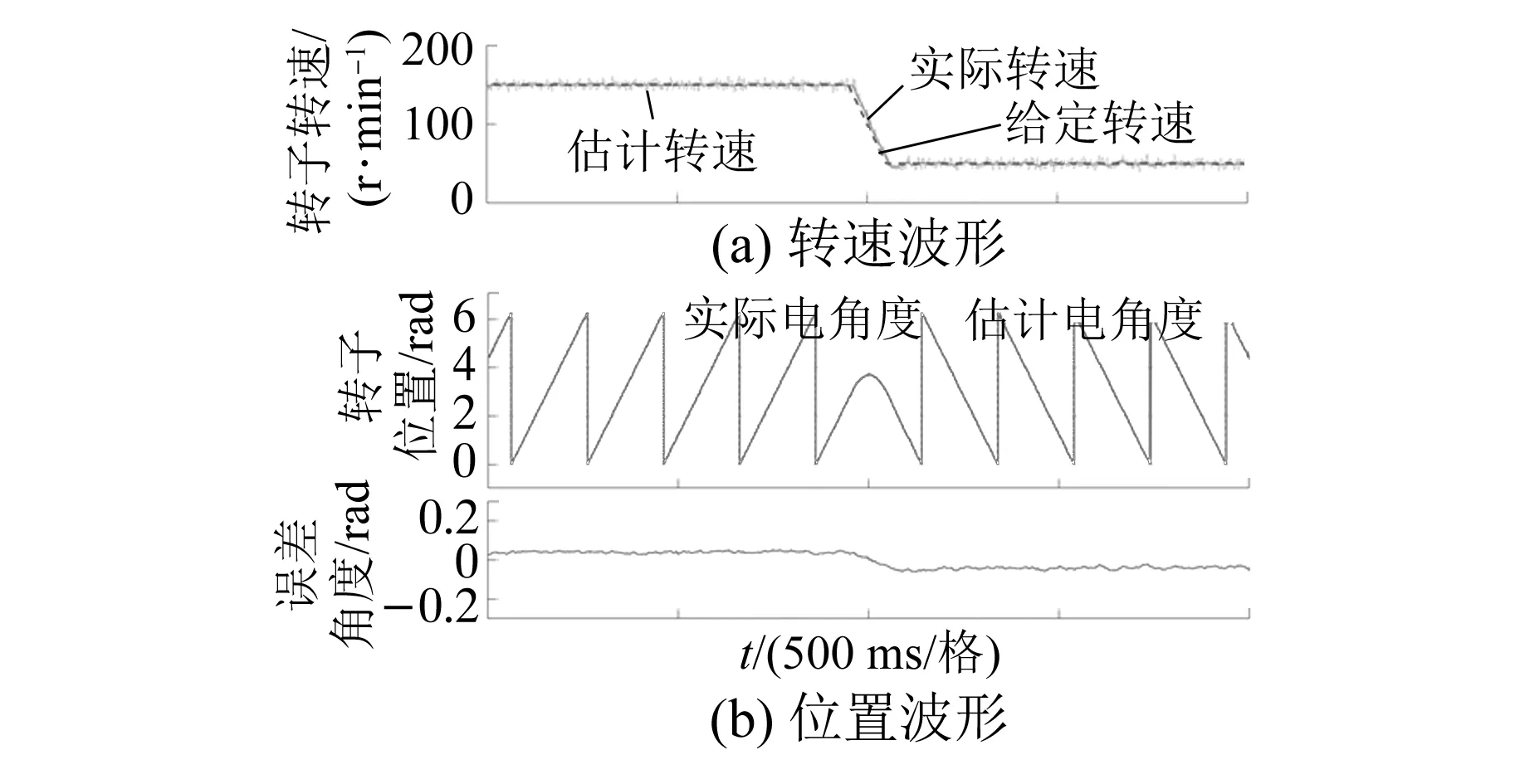
圖9 正反轉仿真波形
圖10為電機運行于100 r/min,在額定負載情況下改變母線電壓的仿真波形對比,母線電壓由310轉為200 V。可以看出2種PLL策略均能有效跟蹤轉子位置。圖10(a)中傳統三階PLL跟蹤策略下電壓突變處轉子位置觀測值出現了0.13 rad的脈動誤差。圖10(b)為改進后的PLL下轉子位置觀測圖,只有0.02 rad的脈動誤差。
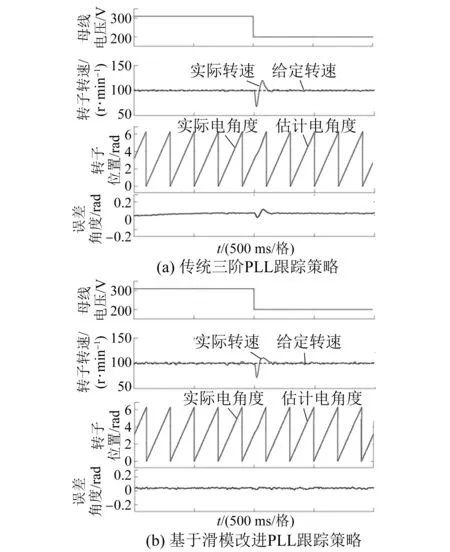
圖10 額定負載下電壓母線快速變化仿真對比
圖11為電機運行于100 r/min,在額定負載情況下改變死區時間的仿真波形對比,死區時間由0轉為5 μs。圖11中,傳統三階PLL與基于滑模改進的PLL相比,在死區時間突變處位置觀測脈動誤差由0.1 rad縮小為0.021 rad,誤差縮小為1/5,能較好地跟蹤實際角度,具有更好的估計精度。
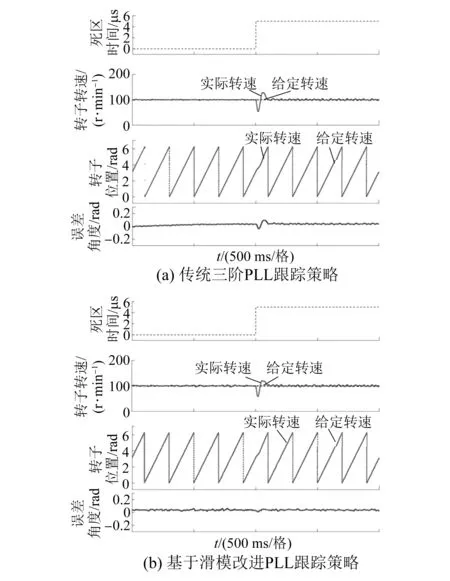
圖11 額定負載下死區時間突變仿真對比
6 試驗結果
為驗證本文提出的基于滑模的改進PLL結構的可行性與有效性,本文采用圖12所示的試驗平臺進行試驗驗證。試驗采用磁滯式測功機進行加載試驗,電機參數與表1仿真參數一致。試驗平臺使用TMS320F28034DSP作為控制器實現控制算法,DSP系統時鐘為60 MHz,系統采用典型的id=0的矢量控制策略。增量式編碼器型號為K58-J6E1024B22,通過編碼器獲得實際轉子位置角度與實際轉速,便于與估測的角度和速度進行對比。
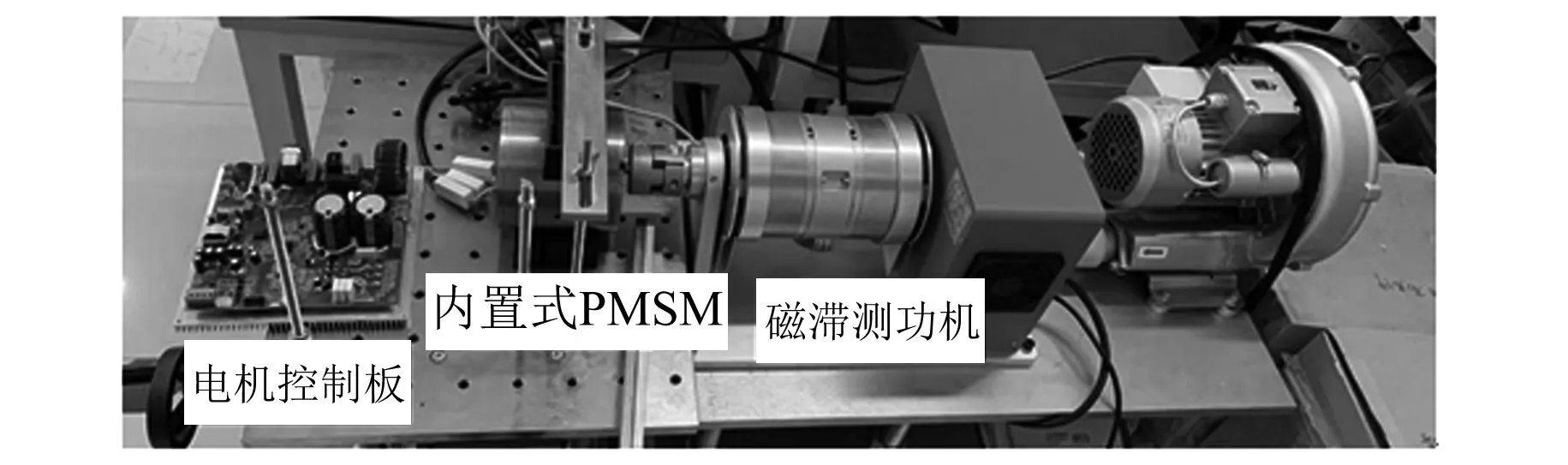
圖12 內置式PMSM驅動系統試驗平臺

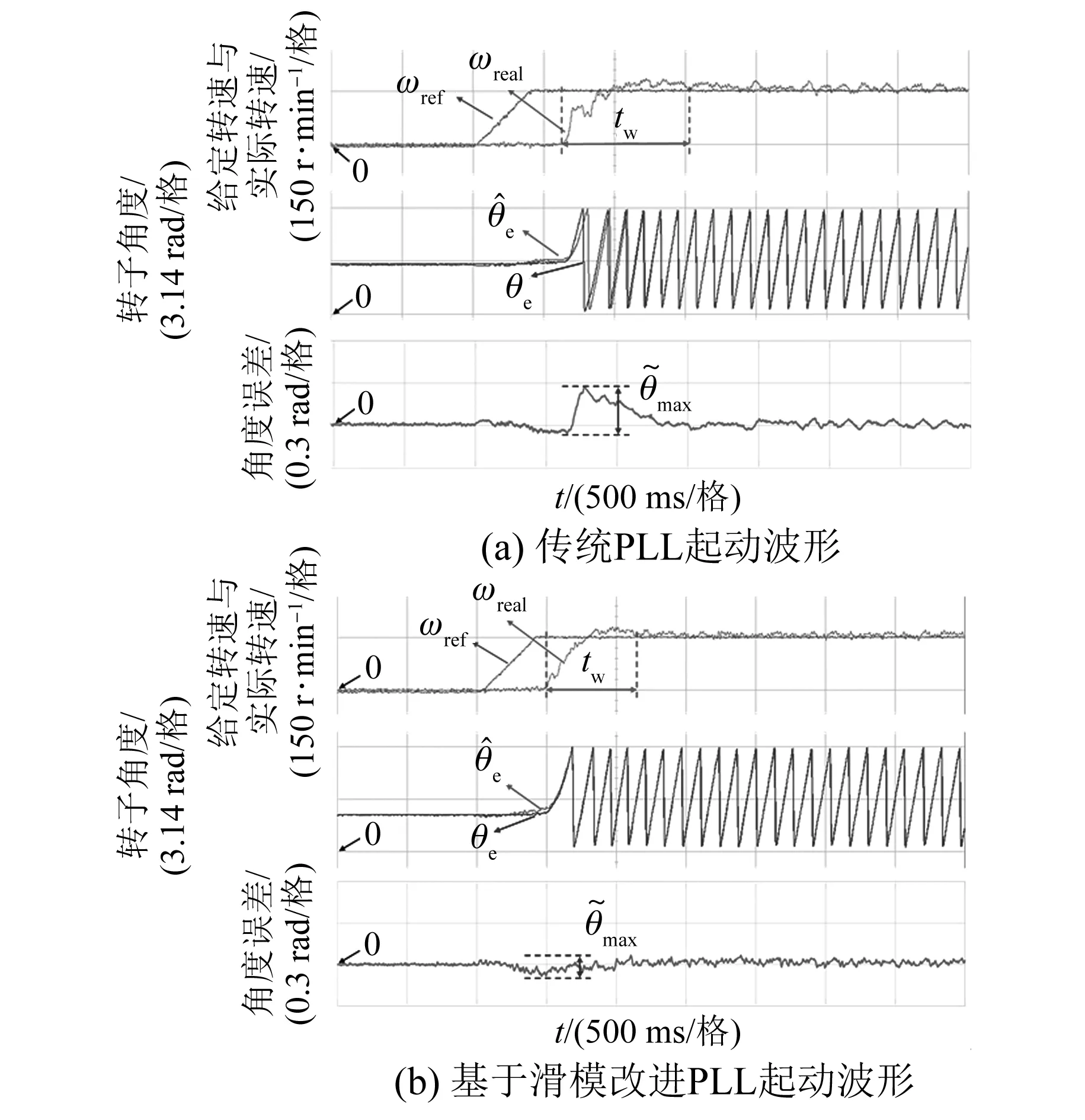
圖13 起動對比試驗波形
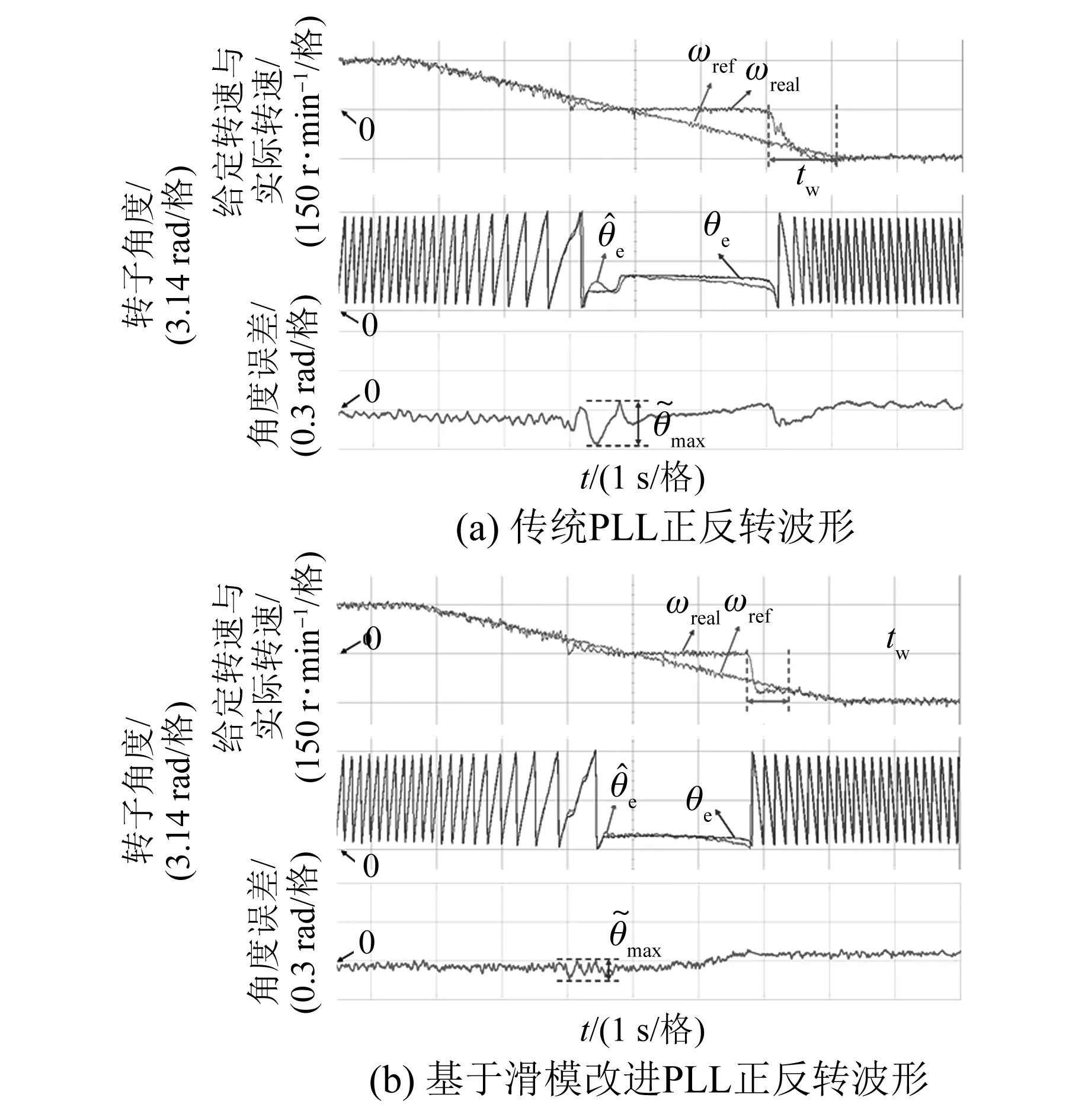
圖14 正反轉試驗對比波形
7 結 語
本文提出了一種基于滑模的改進PLL結構,并對該結構進行了理論分析證明了其收斂性。該方法改善了傳統PLL在電機動態過程中存在穩態誤差的問題,增強了PLL的動態性能和系統的魯棒性能。改進后的PLL結構設計簡單,不需要知道電機參數且易于推廣在無速度傳感以及三相逆變器中使用。最后通過仿真和試驗驗證了該設計具有良好的動態和穩態性能以及較高的跟蹤精度。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
