統(tǒng)一潮流控制器并聯(lián)變換器虛擬慣量控制策略
2021-11-22 12:38:56張海同王金梅袁小威鮑振鐸
科學技術(shù)與工程 2021年30期
關(guān)鍵詞:控制策略
張海同, 王金梅, 袁小威, 何 銘, 鮑振鐸
(寧夏大學物理與電子電氣工程學院, 銀川 750021)
靈活交流輸電(flexible AC transmission system, FACTS)技術(shù)在電力系統(tǒng)中的應用日漸廣泛,統(tǒng)一潮流控制器(unified power flow controller,UPFC)作為第3代柔性交流輸電FACTS裝置的代表,是迄今為止功能最為全面的FACTS裝置[1-3];作為串、并聯(lián)結(jié)合的控制器,能有效地進行線路的潮流控制[4]、無功功率補償及電壓的動態(tài)調(diào)節(jié)[5-7],在提高電能質(zhì)量和改善輸電系統(tǒng)穩(wěn)定運行方面等方面發(fā)揮著非常重要的作用[8-10]。
在電力系統(tǒng)潮流控制時,需要維持UPFC接入點電壓和UPFC內(nèi)部直流電容電壓恒定,從而提高電力系統(tǒng)穩(wěn)定性,否則會導致電壓偏移較大或者UPFC停機從而影響電力系統(tǒng)。文獻[11]對于電網(wǎng)在新能源高滲透率下虛擬慣量逐漸不足問題,建立虛擬慣量分配模型,提出改進的演化算法對慣量進一步優(yōu)化配置,與傳統(tǒng)算法相比,其尋優(yōu)性能較好、精度較高。文獻[12-13]提出了新的電容電壓平衡控制策略,前者在傳統(tǒng)電容電壓平衡控制策略基礎(chǔ)上進了改進,引入了虛擬同步機技術(shù)和載波移項調(diào)制,提高系統(tǒng)虛擬慣量和阻尼系數(shù),保持電壓穩(wěn)定;后者利用卡爾曼濾波特性結(jié)合電流解耦合脈沖補償控制,實現(xiàn)電容電壓平衡,改善控制系統(tǒng)動態(tài)性能。文獻[14]從調(diào)節(jié)線路潮流的角度出發(fā),將線路有功無功潮流作為系統(tǒng)輸入量,來提高控制效果,由于控制器延遲,使得其動態(tài)特性略差;文獻[15]研究了一個真實的多區(qū)域多源的模型,以飛蛾火焰優(yōu)化算法為優(yōu)化工具,以UPFC為運載調(diào)控器,抑制負載擾動時振蕩,增強系統(tǒng)魯棒性;文獻[16-17]詳細分析了UPFC串并聯(lián)側(cè)變換器有功、無功的交互影響,以及交互影響程度與控制器間的耦合程度的關(guān)系;文獻[18]提出了極坐標系下新型功率解耦控制策略,采用串聯(lián)側(cè)變換器有功功率-相位、無功功率-電壓的控制方法,維持功率平衡;文獻[19]通過改進飛蛾撲火算法,建立基于UPFC的電網(wǎng)控制優(yōu)化模型,優(yōu)化后的控制參數(shù),進一步增強系統(tǒng)對電壓支撐能力。
綜上所述,針對UPFC系統(tǒng)在潮流調(diào)節(jié)時的接入點電壓和直流電容電壓波動的問題,現(xiàn)提出基于虛擬慣量的UPFC并聯(lián)變換器控制策略,通過引入UPFC電容虛擬慣量,設(shè)計虛擬慣量控制器,來降低潮流控制過程中的電壓波動,改善系統(tǒng)對電壓的支撐能力;為進一步加快控制速度,提出了一種改進前饋補償點的控制方法,將改進的前饋量引入到并聯(lián)變換器控制環(huán)路中,來改善功率協(xié)調(diào)控制效果,提高系統(tǒng)響應速度;以期為進一步降低電力系統(tǒng)潮流控制時的電壓波動提供理論基礎(chǔ)。
1 UPFC數(shù)學模型
UPFC主要由變壓器以及兩個電壓源型變換器通過直流電容背靠背聯(lián)接而成,由于變換器接入線路方式不同分為并聯(lián)變換器和串聯(lián)變換器。圖1是UPFC結(jié)構(gòu)圖。
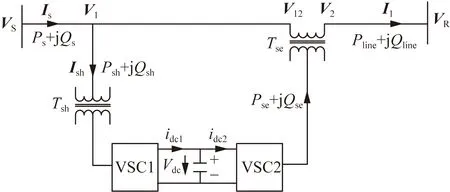
VS和VR分別為線路首端、末端電壓矢量;V1和V2為UPFC接入兩端線路電壓矢量;V12為串聯(lián)側(cè)注入補償電壓矢量;Vdc為直流側(cè)電容電壓;Is和I1分別為線路首端輸入電流、線路電流矢量;Ish為并聯(lián)側(cè)變換器輸入電流矢量;Ps+jQs為線路首段輸送功率;Pline+jQline為線路末端輸送功率;Psh+jQsh為并聯(lián)側(cè)與線路交換功率;Pse+jQse為串聯(lián)側(cè)交換功率;idc1和idc2分別為并聯(lián)側(cè)變換器輸出電流、串聯(lián)側(cè)變換器輸入電流;VSC1和VSC2分別為變換器1、變換器2圖1 UPFC結(jié)構(gòu)圖Fig.1 UPFC structural diagram
UPFC串、并聯(lián)變換器數(shù)學模型[8]可表示為

(1)
(2)
式中:Lsh、ish、νsh和Rsh分別為并聯(lián)側(cè)線路電感、并聯(lián)變換器輸出電流、并聯(lián)變換器輸出電壓和并聯(lián)變換器等效內(nèi)阻。Lse、ise、νse和Rse分別為串聯(lián)側(cè)線路電感、串聯(lián)變換器輸出電流、串聯(lián)變換器輸出電壓和串聯(lián)變換器等效內(nèi)阻。
為了方便控制,三相電壓需作dq旋轉(zhuǎn)坐標變換,將電網(wǎng)電壓ν1定向于d軸方向,變換矩陣為
(3)
式(3)中:ω為角速度。
式(1)和式(2)通過變換矩陣,可得dq旋轉(zhuǎn)坐標系下串并聯(lián)變換器數(shù)學模型為
(4)
(5)
并有
式中:ishd和ishq分別為并聯(lián)側(cè)變換器輸入電流d、q軸分量;ν1d和ν1q分別為電網(wǎng)電壓d、q軸分量;ised和iseq分別為串聯(lián)側(cè)變換器輸出電流d、q軸分量;νsed和νseq串聯(lián)側(cè)變換器輸出電壓d、q軸分量。
通過式(4)、式(5)可以看出,無論是并聯(lián)變換器還是串聯(lián)變換器,它們的有功無功電流分量id和iq都存在強烈的耦合現(xiàn)象。因此,為了達到線性化控制目標,非常有必要設(shè)計合理的解耦控制系統(tǒng)。
將并聯(lián)變換器dq坐標系下數(shù)學模型進行變化,式(4)可表示為
(6)
令
(7)
可得解耦后并聯(lián)變換器的數(shù)學模型:

(8)
由式(8)可知,通過調(diào)節(jié)X1和X2來達到對有功無功電流解耦的控制目標。
2 并聯(lián)變換器控制策略
2.1 并聯(lián)變換器穩(wěn)壓控制最
根據(jù)功率平衡原理,在穩(wěn)壓控制系統(tǒng)直流電容電壓控制過程中引入d軸有功電流前饋量;在UPFC接入點電壓控制過程中引入q軸無功電流前饋量。
由功率平衡原理可知:
Psh=PshR+Pdc
(9)
Pdc=Pse+PseR
(10)
式中:Psh、PshR和Pdc分別為并聯(lián)變換器有功功率、并聯(lián)變換器內(nèi)部消耗功率、直流電容交換功率,Pse和PseR分別為串聯(lián)變換器有功功率、串聯(lián)變換器內(nèi)部消耗功率。
假設(shè)電網(wǎng)電壓三相對稱,根據(jù)對稱性得
(11)
由式(11)可推出串聯(lián)變換器的瞬時有功功率:
(12)
式(12)中:φ為電壓V12與電流Ise的相位差。
已知:
(13)
將式(12)和式(13)代入式(10)中,可得

(14)
由于PseR?Pse,因此可以忽略前者的影響,式(14)可化簡為
(15)
式(15)可變化為
(16)
將式(16)進行坐標變換,可得穩(wěn)壓控制系統(tǒng)有功電流前饋量:
(17)
同理可得,穩(wěn)壓控制系統(tǒng)無功電流前饋量:
(18)
因此,通過在并聯(lián)變換器穩(wěn)壓控制系中引入有功電流前饋量和無功電流前饋量,實現(xiàn)功率的協(xié)調(diào)控制,降低直流電容電壓和UPFC接入點電壓的偏移,提高動態(tài)響應。
2.2 UPFC的虛擬慣量控制策略
在UPFC系統(tǒng)中,直流電容的作用極其重要,既能給串、并聯(lián)變換器提供良好的通路進行有功功率的交換,也能進行濾波和支撐直流電容電壓。當UPFC內(nèi)部的有功功率平衡被打破時,直流電容電壓也隨之變化,此時直流電容進行充電或放電,即對能量的儲存或釋放,類似于同步機轉(zhuǎn)子。模擬前者特性,引入UPFC電容的虛擬慣量。即
(19)
式(19)中:Ec、H、SUPFC分別為直流電容儲存能量、UPFC電容的虛擬慣量和UPFC容量。
通過圖1可得電容功率平衡方程:
(20)
又同步機轉(zhuǎn)子運動方程為
(21)
式(21)中:PT、PE分別為原動機機械功率和同步機電磁功率;HG、f*、f分別為同步機慣量、系統(tǒng)設(shè)定頻率和系統(tǒng)實際頻率。
通過觀察式(20)和式(21)可知,兩個式子的結(jié)構(gòu)和表達形式具有相似性,直流電容對能量的吸收和釋放類同于同步電機轉(zhuǎn)子吸收和釋放能量一樣,前者只是直流電容能量的改變與直流電容電壓變化的關(guān)系,后者是同步電機轉(zhuǎn)子能量的改變與系統(tǒng)頻率變化的關(guān)系。所以建立直流電容電壓和系統(tǒng)頻率的關(guān)系,用直流電容電壓的變化來反映系統(tǒng)頻率的變化,使兩者緊密相連。
因此由式(20)和式(21)可以變形得
(22)
式(22)中:H為UPFC的虛擬慣量。
將式(22)進行積分變換:
(23)
式(23)中:Vdc0為直流電容電壓初始值。
將式(23)變形可得
(24)
以上分析可得,含有虛擬慣量的UPFC并聯(lián)變換器控制系統(tǒng)如圖2所示。
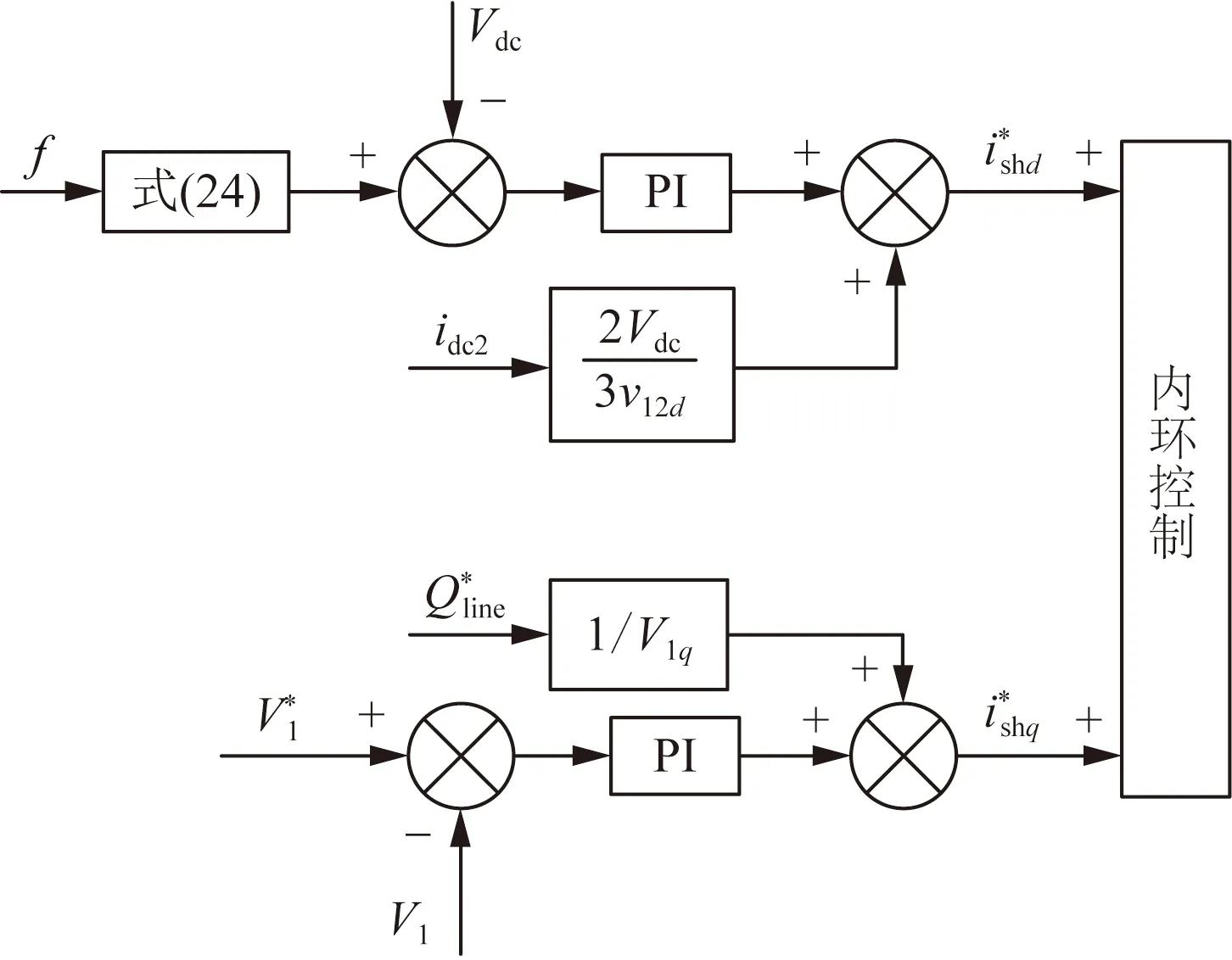
ν* 1和分別為電網(wǎng)電壓設(shè)定值、線路無功設(shè)定值;PI為比例積分控制器圖2 含有虛擬慣量的UPFC并聯(lián)變換器控制系統(tǒng)Fig.2 Control system of UPFC parallel converter with virtual inertia
通過在UPFC并聯(lián)變換器電壓外環(huán)的基礎(chǔ)上,設(shè)計虛擬慣量控制器,并且以系統(tǒng)實際頻率響應為輸入量,從而調(diào)節(jié)直流電容電壓;通過虛擬慣量,使得系統(tǒng)響應得以改善,提高UPFC系統(tǒng)對電壓的支撐能力。
2.3 改進前饋的控制策略
由于在控制系統(tǒng)中存在電感的影響和PI(proportional integral)控制器的延遲,無法進行電流的實時補償,會使得控制效果降低,因此將d軸有功分量控制環(huán)路和q軸無功分量控制環(huán)路做出改進。
UPFC并聯(lián)側(cè)d軸有功分量控制環(huán)路如圖3所示。
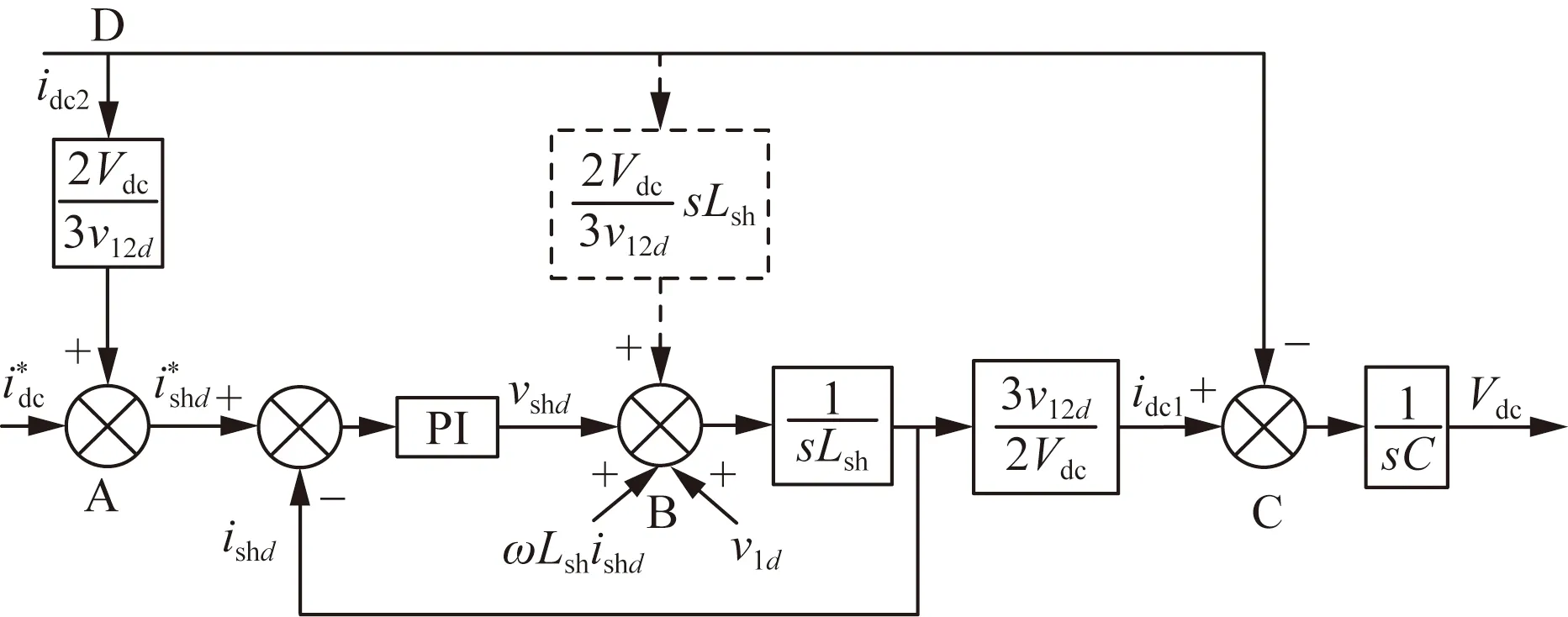
圖3 d軸有功分量控制環(huán)路Fig.3 d-axis active component control loop
由圖3可知,從節(jié)點D到節(jié)點C傳遞函數(shù)為
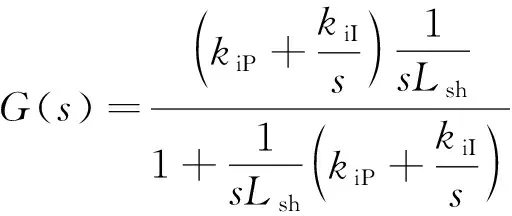
(25)
式(25)中:kiP、kiI分別為UPFC并聯(lián)變換器電感電流比例、積分系數(shù)。
分析式(25)可知,只有當Lsh無窮小,增益無窮大時,從節(jié)點D到節(jié)點C的傳遞函數(shù)才會為單位1。實際情況卻并非如此,為了保證電流濾波的基本要求,Lsh也不可能無窮小;而且又考慮到PI控制器的穩(wěn)定,增益也不可能取得無窮大。基于以上因素影響,使得idc2跟蹤idc1有一定延遲,導致直流電容電壓產(chǎn)生大幅波動。因此,將d軸有功分量控制環(huán)路做出了以下改進,如圖3中虛線所示,將前饋補償點從A點右移至B點,引入電感和微分;降低PI控制器和電感對前饋的影響。
改進后,從節(jié)點D到節(jié)點C傳遞函數(shù)為

(26)
由式(26)可知,改進后的傳遞函數(shù)為單位1,能夠?qū)崿F(xiàn)電流的無差別實時補償。
UPFC并聯(lián)側(cè)q軸無功分量控制環(huán)路如圖4所示。
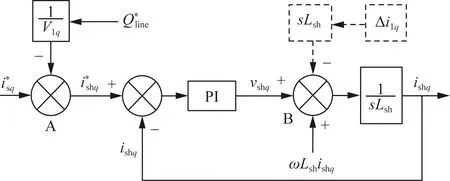
圖4 q軸無功分量控制環(huán)路Fig.4 q-axis reactive component control loop
3 仿真驗證
為了驗證所提控制策略的有效性,設(shè)計兩種工況來進行實驗驗證。工況1:線路潮流控制(改變輸電線路潮流設(shè)定值時,系統(tǒng)動態(tài)響應);工況2:三相短路(在含有UPFC的仿真輸電系統(tǒng)中,將串聯(lián)變換器調(diào)控的負載處進行三相短路連接);運用MATLAB搭建UPFC仿真模型。系統(tǒng)仿真控制參數(shù)如表1所示。
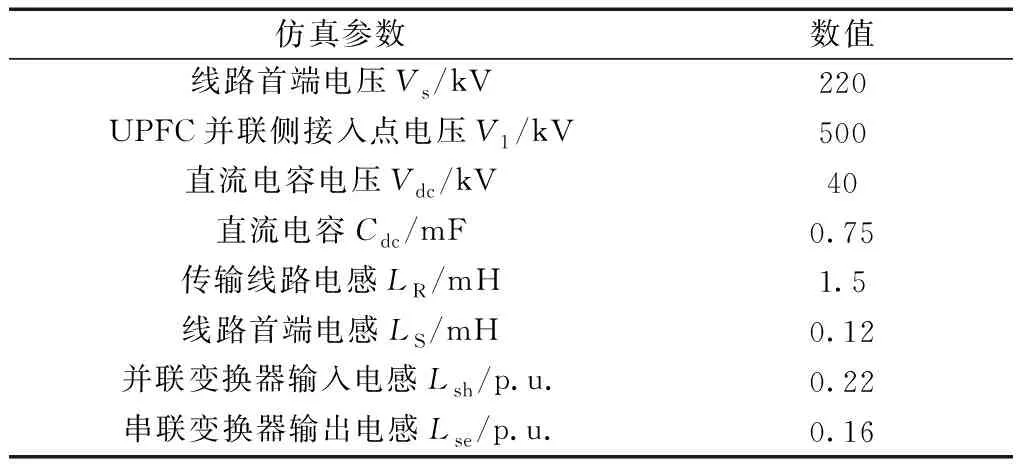
表1 UPFC仿真參數(shù)Table 1 UPFC simulation parameters
3.1 工況1:潮流控制
UPFC系統(tǒng)控制的線路有功功率和無功功率初始值分別為5.87、-0.27 p.u.,仿真時間為20 s,在第2 s時UPFC切入,UPFC虛擬慣量H為0.704 s。
圖5為有功功率設(shè)定值改變時線路潮流仿真波形圖,觀察圖5可知,線路有功功率初始值為5.87 p.u.,6 s時設(shè)置為6.87 p.u.,第14 s時又恢復至初始值,且在1 s內(nèi)迅速保持穩(wěn)定,設(shè)定值改變前后,有功調(diào)節(jié)都有著較好的響應速度;潮流調(diào)節(jié)過程中,有功潮流的變化對無功潮流影響甚微。
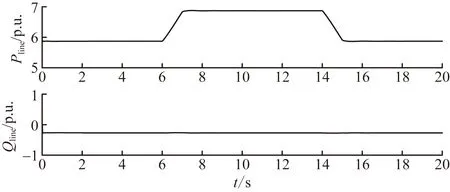
圖5 有功設(shè)定值改變時線路潮流波形圖Fig.5 Waveform diagram of line flow when the active power setting value changes
圖6為無功功率設(shè)定值改變時線路潮流仿真波形圖,由上圖可知,線路無功功率初始值為-0.27 p.u.,6 s時設(shè)置為-0.17 p.u.,第14 s時又恢復至初始值,在0.2 s內(nèi)迅速保持穩(wěn)定,設(shè)定值改變前后,無功調(diào)節(jié)有著較快的響應速度;潮流調(diào)節(jié)過程中,無功功率的變化對有功潮流影響甚微。
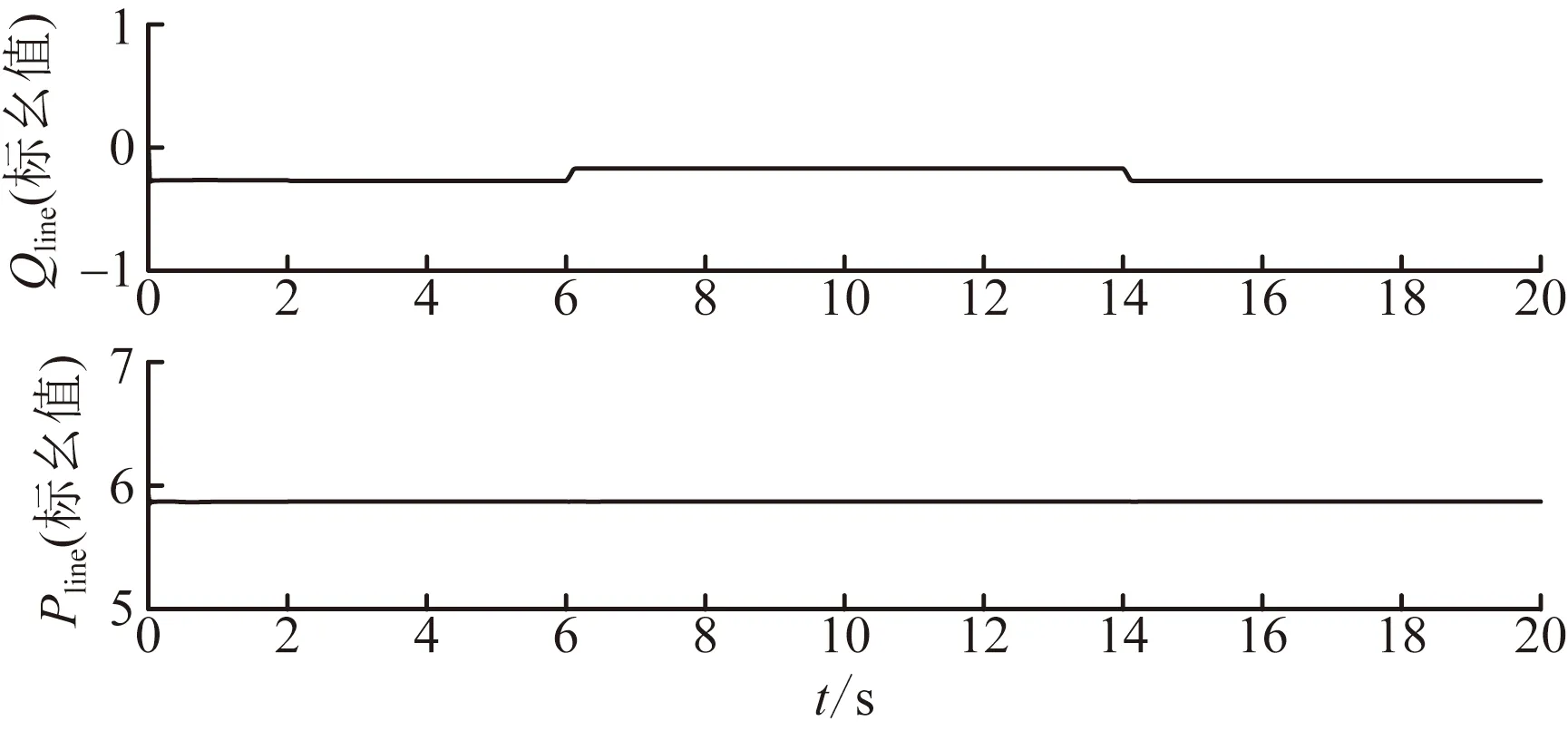
圖6 無功設(shè)定值改變時線路潮流波形圖Fig.6 Waveform diagram of line flow when reactive power setting value changes
通過上文分析可知,在采用了本文控制策略下,UPFC系統(tǒng)仍然有著較好的潮流調(diào)節(jié)能力,可以達到有功無功獨立調(diào)控的要求。
常規(guī)控制策略、本文控制策略下并聯(lián)側(cè)接入點電壓仿真波形如圖7和圖8所示。
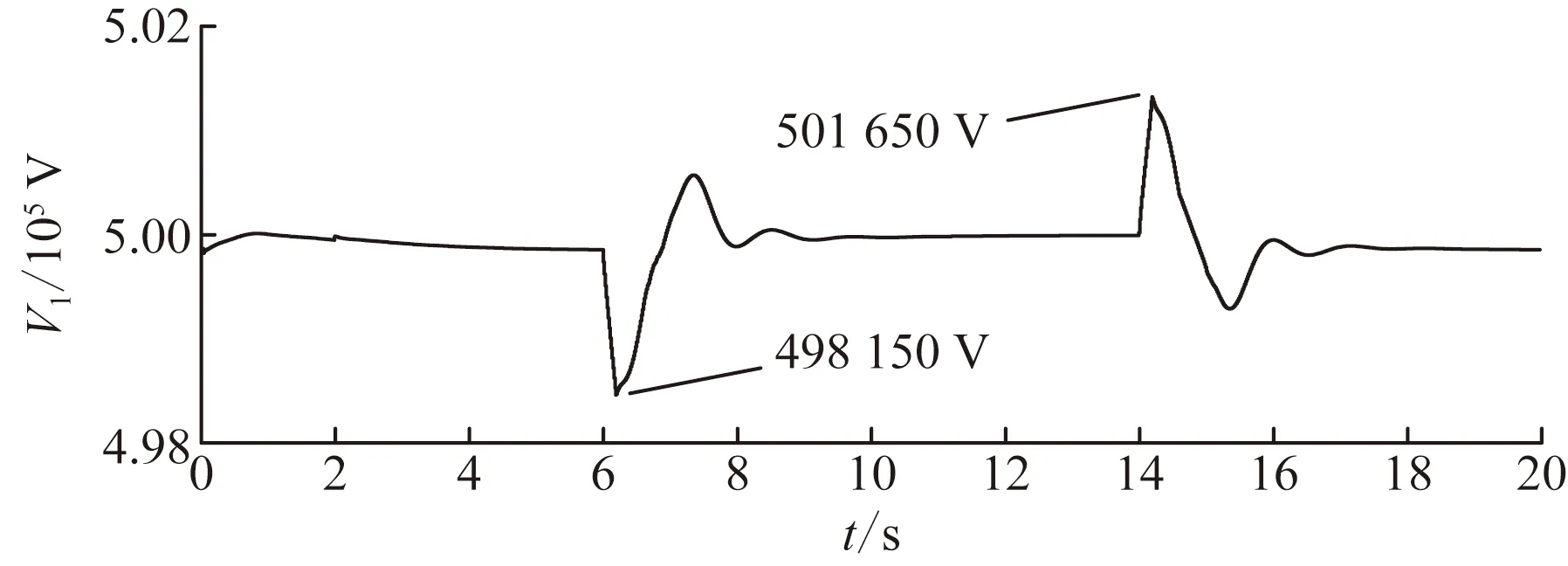
圖7 常規(guī)控制策略下并聯(lián)側(cè)接入點電壓Fig.7 The Voltage of parallel access point under conventional control strategy
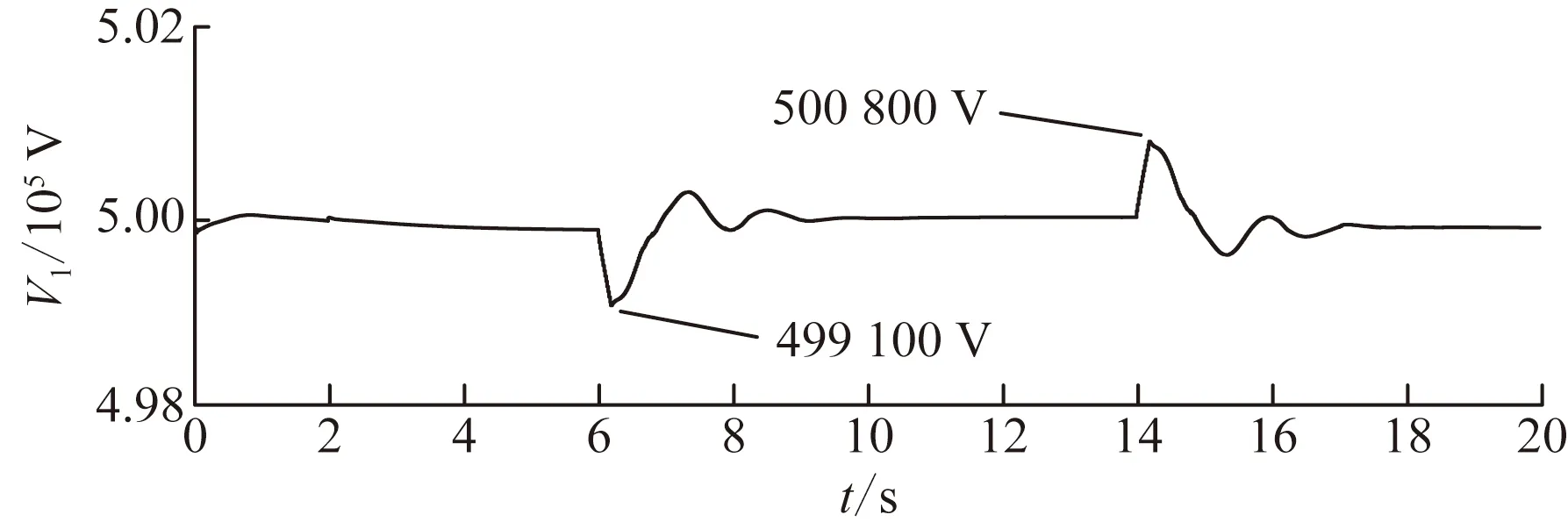
圖8 文中控制策略下并聯(lián)側(cè)接入點電壓Fig.8 The voltage of parallel access point under the control strategy in this paper
通過圖7和圖8可以看出,在采用文中控制方法后,并聯(lián)側(cè)接入點電壓的最大值和最小值分別由501 650、498 150 V變?yōu)?00 800、499 100 V,電壓偏移量由3 500 V減小至1 700 V,并聯(lián)側(cè)接入點電壓幅值波動范圍明顯變小。
常規(guī)控制策略、文中控制策略下直流電容電壓仿真波形如圖9和圖10所示。
由圖9和圖10可知,常規(guī)控制策略下電容電壓振蕩嚴重、波動范圍大,8.6 s時電容電壓趨于穩(wěn)定;采用文中控制策略后電容電壓最大值由40 010 V變?yōu)?0 005 V,最小值由39 990 V變?yōu)?9 995 V,電壓波動由20 V減少為10 V;8.3 s時電容電壓趨于穩(wěn)定,由于UPFC虛擬慣量,提高了UPFC系統(tǒng)對電壓的支撐,因此電容電壓振蕩次數(shù)減少,電壓波動幅值變小,電壓波動衰減時間也降低了0.3 s。
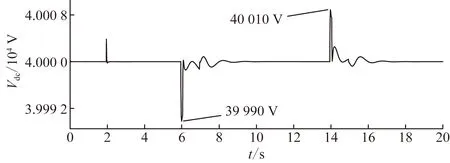
圖9 常規(guī)控制下直流電容電壓Fig.9 DC capacitor voltage under conventional control
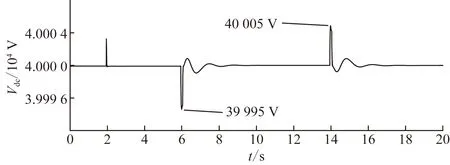
圖10 文中控制策略下直流電容電壓Fig.10 DC capacitor voltage under the control strategy in this paper
3.2 工況2:三相短路
線路有功無功初始值分別為6.87、-0.17 p.u.,仿真時間為20 s,在第5 s時UPFC切入,UPFC虛擬慣量H為0.704,在第7 s時三相故障模塊切入閉合,持續(xù)50 ms,即在第7.05 s時該模塊斷開,線路恢復正常。
圖11為在三相短路時并聯(lián)側(cè)接入點電壓仿真波形。由于三相短路故障的出現(xiàn),線路首端電壓急速下降,末端電壓也會受到嚴重影響,因此并聯(lián)側(cè)接入點電壓也會有顯著變化。由圖11可知,常規(guī)控制策略下電壓波動較大、震蕩頻繁;然而在文中控制策略下,電壓波形起伏略緩,振蕩減少,并快速恢復至穩(wěn)態(tài)值。
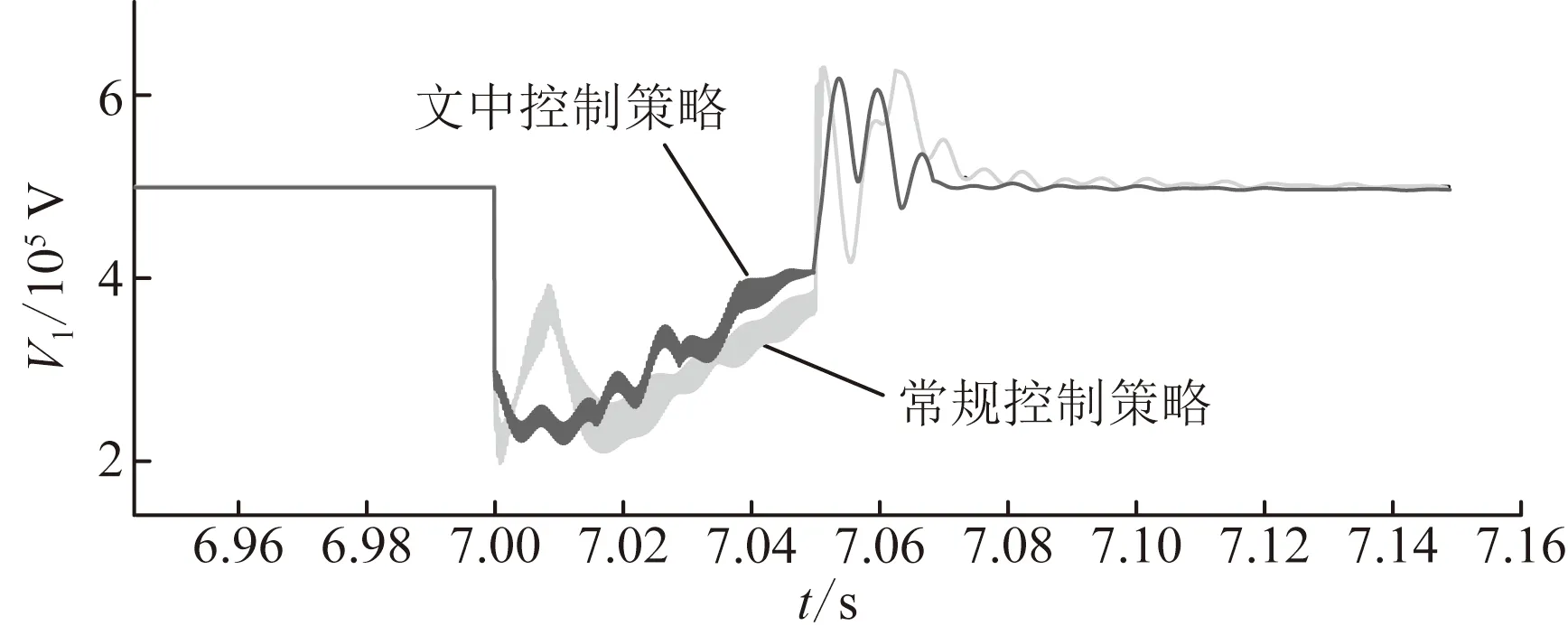
圖11 三相短路時并聯(lián)側(cè)接入點電壓Fig.11 The voltage of parallel access point under three-phase fault
圖12為在三相短路時直流電容電壓仿真波形。
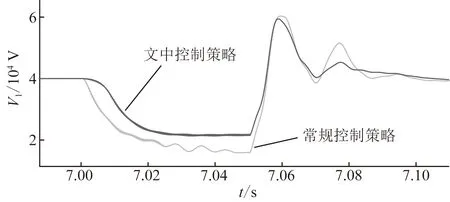
圖12 三相短路時直流電容電壓Fig.11 DC capacitor voltage under three-phase fault
由圖12可知,常規(guī)控制策略下,當系統(tǒng)發(fā)生三相故障時,電容電壓突然下降,轉(zhuǎn)折點明顯,在電容特性的支撐下有了部分時段電壓平緩下降,振蕩明顯,且在事故消除后波動較大;在文中控制策略下,當發(fā)生三相故障時,電容電壓平緩下降并快速穩(wěn)定,由于電容特性、以及電容的虛擬慣量的注入,使得系統(tǒng)對電壓的支撐能力得到有效的提升,故障消除后,電容電壓的波動、振蕩以及恢復時間也略少于前者。
4 結(jié)論
針對潮流控制過程中UPFC系統(tǒng)的接入點電壓和直流電容電壓波動的問題,引入UPFC虛擬慣量,設(shè)計了其虛擬慣量控制器,提出基于虛擬慣量的并聯(lián)變換器控制策略以及改進前饋的控制方法,來及時抑制UPFC潮流控制過程中功率不平衡的影響,提高系統(tǒng)反應速度。與常規(guī)控制策略進行了兩種工況仿真驗證對比,結(jié)論如下。
在文中控制策略下,UPFC系統(tǒng)仍有較好的潮流控制能力,該控制策略能有效地降低并聯(lián)側(cè)接入點電壓和直流電容電壓的波動,后者響應時間也降低了0.3 s,系統(tǒng)功率平衡得以提高,協(xié)調(diào)控制效果良好;當系統(tǒng)發(fā)生三相故障時,由于UPFC電容虛擬慣量的注入,使得系統(tǒng)對電壓的支撐能力也得以改善,因此,該策略能在一定程度上減少三相故障對電壓跌落程度的影響。
猜你喜歡
艦船科學技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36