電網對稱短路故障下直驅風電并網逆變器暫態同步特性研究
2021-11-22 09:43:30于海徐貴姚駿曹斌劉遠李偉光郝文海
可再生能源 2021年11期
關鍵詞:故障
于海,徐貴,姚駿,曹斌,劉遠,李偉光,郝文海
(1.內蒙古電力(集團)有限責任公司,內蒙古呼和浩特 010020;2.內蒙古電力(集團)有限責任公司包頭供電局,內蒙古包頭 014030;3.輸配電裝備及系統安全與新技術國家重點實驗室重慶大學,重慶 400044)
0 引言
直驅式風力發電系統具有結構簡單、發電效率高、運行可靠性高等優點,逐漸成為風力發電主流機型。由于風電大規模、集中開發以及遠距離輸送,使得直驅風電并網逆變器輸出電流與線路阻抗交互越來越嚴重,在嚴重電網短路故障下并網逆變器容易出現暫態失穩問題[1],可能造成電力系統有功缺額,不利于系統頻率穩定。
當電網擾動較大時,故障點附近新能源并網系統輸出功率會出現波動。文獻[2]基于等面積原理,研究了不同控制方式下光伏并網系統對電網振蕩阻尼的作用,結果表明,采用定電壓方式有利于提高電網阻尼。針對風電波動不確定性的送端電網功角穩定問題,文獻[3],[4]提出基于線性變參數模型的互聯電網暫態魯棒輸出反饋控制模型及算法,通過暫態過程中的功率控制提高暫態穩定性。上述文獻更多的是關注新能源并網逆變器輸出功率對電網的影響,實際上,基于鎖相同步的并網逆變器在暫態期間須要與電網保持同步,在嚴重電網故障期間并網逆變器存在失步風險,因此其自身同步特性有待進一步展開研究。
目前,電力電子并網設備低壓穿越(Low Voltage Ride-through,LVRT)著重考慮了其容量限制下的電流控制能力[5],[6]。然而,在電網故障期間,并網導則要求電力電子并網設備輸出無功電流支撐電網電壓[7],而電力電子并網設備對外輸出的無功電流將在傳輸線路上形成大幅的壓降,進而會影響公共連接點(Point of Common Coupling,PCC)電壓。同時,電力電子并網設備的鎖相環(Phase-locked Loop,PLL)又須要基于并網點電壓檢測電網頻率,并為輸出電流的控制提供相位參考[8]。并網逆變器輸出電流經線路阻抗進一步與電網電壓交互,可能導致電力電子并網設備與電網失去同步。文獻[9]研究了雙饋風電系統在低電壓穿越期間電壓幅值和相角同步失穩的演化過程,給出了暫態不失穩邊界。文獻[10]提出虛擬功角并研究了基于下垂控制變流器的暫態穩定性問題。文獻[11]考慮了鎖相環的動態,在機電時間尺度對并網逆變器進行了建模和分析,研究表明,鎖相環帶寬會對并網逆變器的暫態過程產生影響,但影響機理尚不明確。因此,有必要對故障期間直驅風電并網逆變器的暫態同步特性及其影響因素進行分析。通過類比同步發電機同步特性,文獻[12]建立了并網逆變器的靜止同步發電機模型,基于其阻尼特性,分析了直流側功率與交流側輸出功率不平衡時并網逆變器等效功角的動態特性。但其所建立模型忽略了PLL動態,因此無法體現鎖相環參數對并網逆變器暫態同步特性的影響。鎖相環動態會對并網逆變器暫態同步特性產生很大影響[9],因此,本文借鑒文獻[12]的建模思想,考慮PLL的控制特性,類比傳統同步發電機的轉子運動方程,建立直驅風電并網逆變器的簡化模型,進一步對其暫態同步特性進行研究。
由于直驅風力發電系統背靠背變流器可實現機側與網側隔離,并通過網側逆變器與電網進行功率交互。因此,本文主要關注直驅風電網側逆變器與電網的暫態同步特性,通過類比傳統同步發電機的轉子運動方程,得到基于鎖相同步的并網逆變器頻率同步方程,分析了不同電網電壓跌落程度以及PLL參數對直驅風電并網逆變器等效功角以及頻率同步特性的影響。最后,在Matlab/Simulink中建立了直驅風電并網逆變器的時域仿真模型,仿真結果驗證了理論分析的準確性。
1 直驅風電并網逆變器暫態簡化模型
直驅式永磁同步發電機風電系統控制如圖1所示。

圖1 直驅式永磁同步發電機風電系統控制框圖Fig.1 The diagram of the permanent magnet synchronous generator(PMSG)direct-driven wind-power generation system
圖中:Us,I,Ug分別為直驅風電并網逆變器端電壓矢量、輸出電流矢量和電網電壓矢量;Zg為線路傳輸阻抗;P*,P分別為有功功率指令值和實際值;別為LVRT期間有功電流和無功電流指令值。無功電流設置為0,實現單位功率因數發電。電網正常運行時,直驅風電并網逆變器采用功率外環電流內環控制模式,從而實現最大功率跟蹤(Maximum Power Point Tracking,MPPT);當電網發生短路故障時,直驅風電并網逆變器進入LVRT控制模式。為了滿足電網導則[7]關于并網設備在故障期間須快速輸出無功電流以支撐電網電壓的要求,直驅風電并網逆變器將切換為單電流環控制模式。
PLL用來檢測Us相位,并為輸出電流指令值提供相位基準。圖2為典型PLL控制框圖。
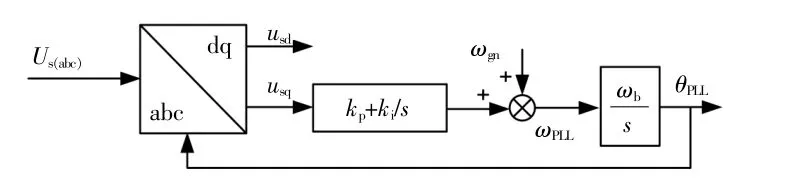
圖2 典型PLL控制框圖Fig.2 The diagram of the typical PLL
圖中:下標d,q分別為同步旋轉坐標系d軸、q軸分量;ωPLL,ωgn和ωb分別為鎖相環輸出角頻率、電網額定角頻率以及角頻率基值;θPLL為旋轉坐標系d軸角度;kp,ki分別為鎖相環PI控制器的比例、積分系數。
由圖2可得PLL輸出頻率為

基于模型降階的原理,本文將直驅風電并網逆變器等效為受控電流源[13]~[15]。在實際工程應用中,電流環帶寬一般設計為幾百赫茲(ms級),而鎖相環帶寬一般為幾十赫茲(百ms級),鎖相環帶寬比電流環帶寬小很多。因此,在研究基于鎖相同步并網逆變器的暫態同步過程中,可以假設電流環是理想的[9]~[15],輸出電流可以快速跟隨指令值,即id=i*d,iq=i*q。
圖3為同步旋轉dq坐標系下,直驅風電并網逆變器的簡化結構圖。圖中:Rg和Xg分別為傳輸線路電阻和感抗,與電網線路等效阻抗相比,并網逆變器濾波阻抗往往較小,因此可以忽略,從而關注并網逆變器輸出濾波后電壓Us與電網的交互作用[9]~[11],[14],[15];δ為Ug和Us之間的夾角,可以等效為直驅風電并網逆變器的功角。
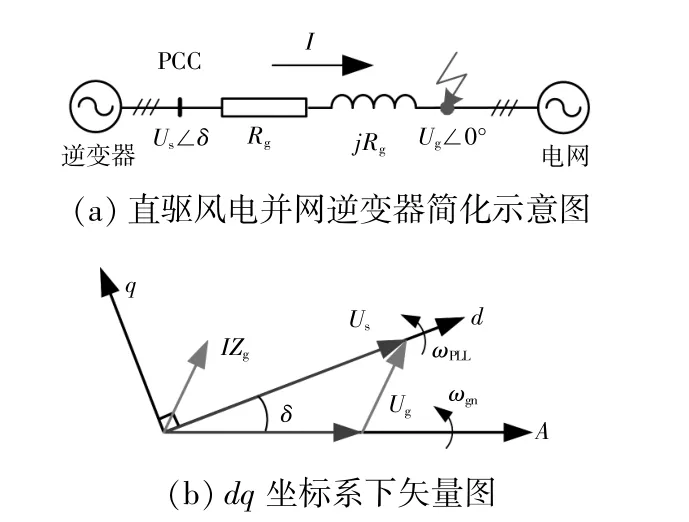
圖3 直驅風電并網系統簡化示意圖及其dq坐標系下矢量圖Fig.3 The simplified schematic diagram and vector diagram of the direct-driven wind-power generation system
δ變化率為

根據圖3可知,直驅風電并網逆變器端電壓Us由電網電壓Ug和傳輸線路壓降IZg決定,因此Us在dq旋轉坐標系的分量usd,usq表達式分別為

將式(2),(3)代入式(1)進行化簡,得到直驅風電并網逆變器頻率同步方程為

式中:Jeq,Deq分別為直驅風電并網逆變器的等效慣量系數和等效阻尼系數,其表達式為
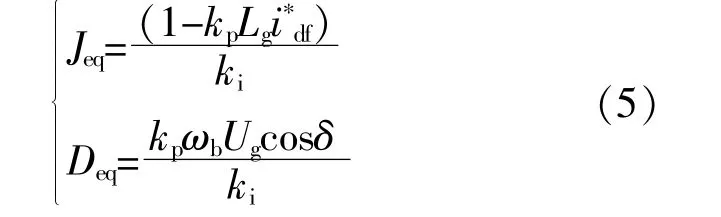
式(4),(5)表明,直驅風電并網逆變器的頻率同步過程主要取決于Jeq,Deq,而Jeq,Deq與系統控制參數和運行狀態相關。因此,PLL參數kp和ki,電流指令值i*df和i*qf,電網電壓Ug以及傳輸線路電感Lg均會對直驅風電并網逆變器暫態同步過程中的等效功角δ以及頻率fPLL響應特性產生影響。
2 直驅風電并網逆變器暫態同步過程及其影響因素分析
2.1 直驅風電并網逆變器暫態同步過程分析
在直驅風電并網逆變器簡化模型的基礎上,通過式(1)~(5),可以得到直驅風電并網逆變器的暫態同步過程,如圖4所示。

圖4 直驅風電并網逆變器暫態同步過程Fig.4 The transient synchronization process of the directdriven wind-power generation's grid-connected inverter
當電網發生短路故障,直驅風電并網逆變器將切換到LVRT控制模式,電流指令變為i*df,i*qf,根據式(3)可知,此時usq不再為0。根據式(5)頻率同步方程,ωPLL的變化會改變δ和usq,但由于存在Jeq,Deq,最終ωPLL=ωgn,δ運行到新的平衡點處,同時usq被消除為0,直驅風電并網逆變器與電網實現同步。圖中虛線框的同步過程與傳統同步發電機相同,表明基于鎖相同步的并網逆變器與同步發電機具有相似的同步表達形式,且同步過程中ωPLL的動態特性主要由Jeq,Deq決定。
圖5為暫態同步過程中直驅風電并網逆變器ωPLL和δ的運行曲線,直驅風電并網逆變器在t1時刻進入低電壓穿越模式,在t2時刻實現與電網穩定同步。
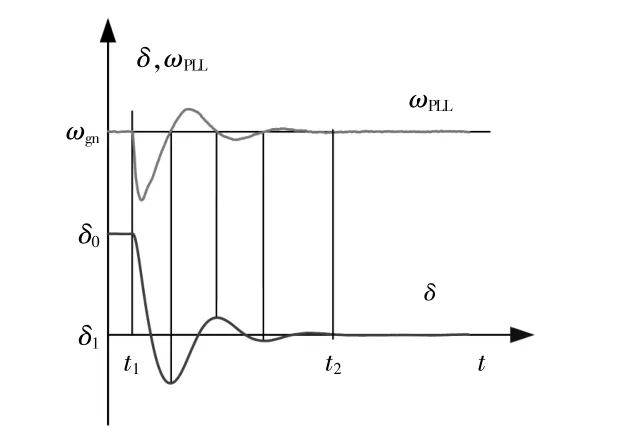
圖5 暫態同步過程中直驅風電并網逆變器ωPLL和δ的運行曲線Fig.5 The operating trajectory ofδandωPLL during the direct-driven wind-power generation grid-connected inverter's transient synchronization process
圖中:ωgn為電網額定角頻率;δ0,δ1分別為系統故障前功角以及故障期間穩定后功角。
2.2 直驅風電并網逆變器暫態同步特性的影響因素分析
根據式(5)可知,要保證直驅風電并網逆變器與電網保持同步,Jeq,Deq均須為正數,因此可得系統的穩定運行裕度為

式中:δ1為系統穩態下直驅風電并網逆變器的等效功角。
在滿足直驅風電并網逆變器穩定運行裕度后,根據前文分析可知,電網電壓Ug,PLL參數kp,ki對Jeq,Deq均會產生影響。而在直驅風電并網逆變器的暫態同步過程中,主要關注并網逆變器的頻率fPLL和等效功角δ的響應特性。因此,本節主要研究Ug,kp,ki對直驅風電并網逆變器暫態同步過程中等效功角δ以及頻率fPLL響應特性的影響規律。
保證其他參數不變,根據式(5)分別改變電網電壓Ug,鎖相環參數kp,ki,得到Deq,Jeq變化曲線,如圖6所示。
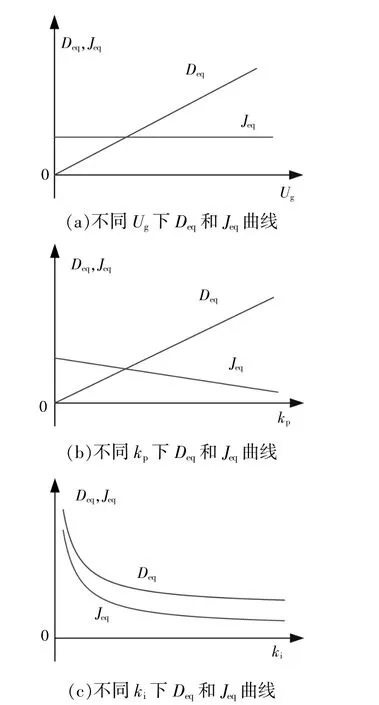
圖6 Deq,Jeq變化曲線Fig.6 The variation trend diagram for Deq and Jeq
3 仿真驗證
為了驗證直驅風電并網逆變器暫態同步過程理論分析的準確性,本節在Matlab/Simulink中搭建了直驅風電并網逆變器的詳細模型,并進行了仿真驗證,其中將永磁同步電機及機側變流器等效為直流電壓源[17]。在電網對稱短路故障期間,仿真分析了不同電壓跌落程度以及PLL參數對直驅風電并網逆變器暫態同步過程中等效功角δ和頻率fPLL的響應特性的影響。直驅風電并網逆變器系統控制框圖如圖1所示。仿真系統參數如表1所示。
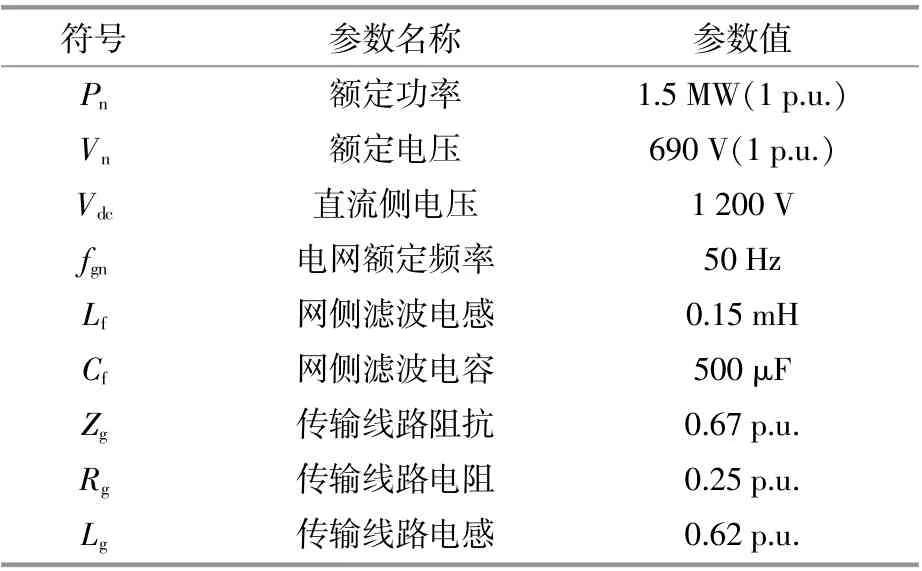
表1 直驅風電并網逆變器系統參數Table 1 Parameters of direct-driven wind-power generation grid-connected inverter system
3.1 并網逆變器在不同電網電壓跌落程度下暫態同步過程
當電網發生短路故障且電網電壓Ug<0.9 p.u.時,并網逆變器切換至LVRT控制模式。電網導則要求并網設備快速輸出無功電流支撐電網電壓,而且無功指令i*qf與電壓跌落程度Ug相關[7]。但電網導則未對有功電流指令i*df有明確要求。文獻[9]研究表明,當i*df/i*qf等于傳輸線路阻感比(Rg/Xg)時,并網逆變器一定存在平衡點。在LVRT期間應主要關注并網穩定性,此外,本文主要在系統平衡點存在的基礎上,研究直驅風電并網逆變器的暫態同步特性,因此,在故障期間,直驅風電并網逆變器的有功、無功電流指令為
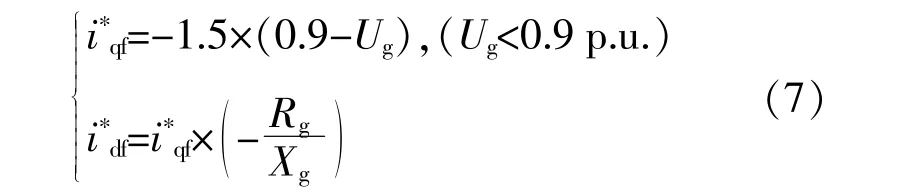
式中:i*qf的取值滿足電網導則;i*df的取值保證故障期間系統平衡點存在。
圖7為不同電壓跌落程度下直驅風電并網逆變器的暫態同步過程。在1 s時電網出現對稱短路故障,直驅風電并網逆變器切換為LVRT控制模式,故障期間直驅風電并網逆變器的電流指令按照式(7)設定。PLL系數kp,ki分別為0.5,40,分別設置故障點電壓Ug為0.15,0.3,0.5 p.u.。由圖7可知,在0.15到0.5 p.u.過程中,Ug在減小,根據圖6(a)可知,Ug減小使Deq減小。因此暫態同步過程中,Deq減小使得fPLL的振蕩越劇烈,并且達到穩定時間越長。此外,根據式(3)可知,Ug減小使得usq減小,因此在暫態同步過程中fPLL的超調會減小。隨著Ug減小,δ振蕩越劇烈,并且達到穩定時間越長。直驅風電并網逆變器輸出電流指令值i*d,i*q根據式(8)確定。輸出電流可以快速跟隨指令值,但同步過程中δ振蕩會使得電流產生振蕩。因此,隨著Ug減小,δ振蕩越劇烈,對應輸出電流振蕩越劇烈。仿真結果與理論分析一致。
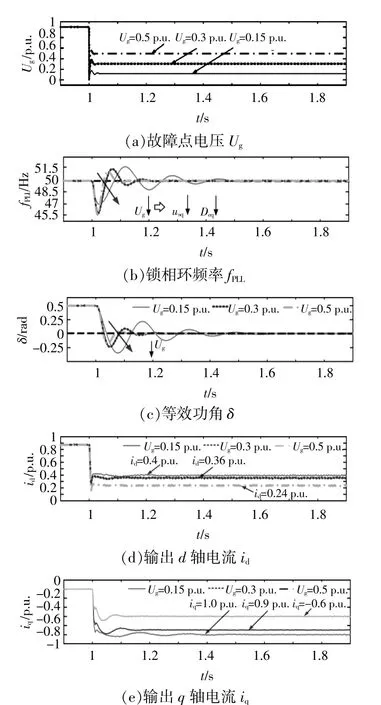
圖7 不同電壓跌落程度下直驅風電并網逆變器的暫態同步過程Fig.7 Direct-driven wind-power generation grid-connected inverter's transient synchronization process with different voltage drop
3.2 并網逆變器在不同PLL參數下暫態同步過程
圖8為不同PLL比例系數kp下,直驅風電并網逆變器的暫態同步過程。在1 s時電網發生短路故障,電網電壓Ug跌落至0.15 p.u.,直驅風電并網逆變器切換為LVRT控制模式,故障期間直驅風電并網逆變器的電流指令按照式(7)設定。保持PLL積分系數ki為40不變,分別設置PLL比例系數kp為0.5,1,1.5時,表明kp在增大過程中,根據圖6(b)可知,kp增大使得Jeq減小、Deq增大,Jeq減小,使得fPLL的超調增大。此外,Deq增大使得fPLL的振蕩減小并且快速達到穩定。圖8(c)中,隨著kp增大,δ的振蕩會減小且快速達到穩定。直驅風電并網逆變器輸出電流id,iq穩定值分別為0.4,-1 p.u.。隨著kp增大,輸出電流振蕩減小并快速達到穩定。仿真結果與理論分析一致。
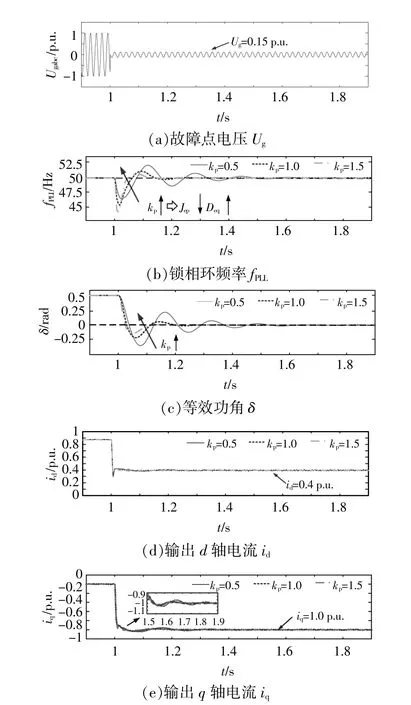
圖8 不同PLL比例系數kp下直驅風電并網逆變器的暫態同步過程Fig.8 The direct-driven wind-power generation gridconnected inverter's transient synchronization process with different PLL's kp
圖9為不同PLL積分系數ki下直驅風電并網逆變器的暫態同步過程。在1 s時電網發生短路故障,電網電壓Ug跌落至0.15 p.u.。直驅風電并網逆變器切換為LVRT控制模式,故障期間直驅風電并網逆變器的電流指令按照式(7)設定。保持PLL比例系數kp為0.5不變,分別調節PLL積分系數ki為40,20,10時,直驅風電并網逆變器暫態同步過程中,fPLL和δ的響應特性分別如圖9(b)和(c)所示。ki在減小過程中,根據圖6(c)可知,ki減小使得Jeq,Deq均增大。在暫態同步過程中,fPLL的超調和振蕩均會減小,并且快速達到穩定。隨著ki減小,在暫態同步過程中,δ的振蕩會減小且快速達到穩定。直驅風電并網逆變器輸出電流id,iq穩定值分別為0.4,-1 p.u.。隨著ki減小,輸出電流振蕩減小并快速達到穩定。仿真結果與理論分析一致。
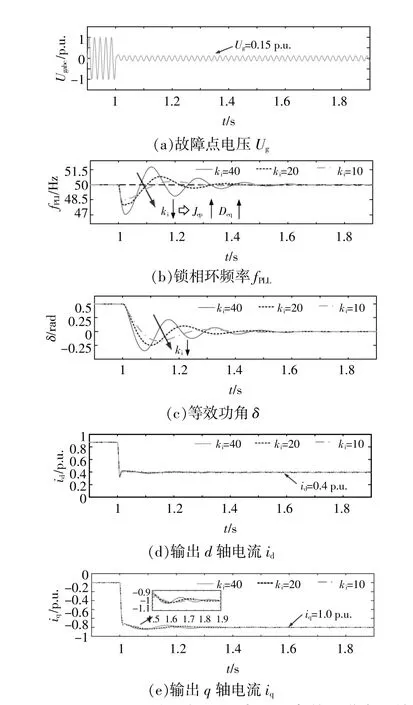
圖9 不同PLL積分系數ki下直驅風電并網逆變器的暫態同步過程Fig.9 The direct-driven wind-power generation gridconnected inverter's transient synchronization process with different PLL's ki
根據圖7~9分析,故障期間增加PLL的kp或減小ki,均可降低直驅風電并網逆變器等效功角δ的振蕩,并快速達到穩定。增大kp會增大等效阻尼系數Deq,因此fPLL振蕩會減小并快速穩定,但會減小等效慣量Jeq,使得fPLL超調增大。而減小ki使得等效阻尼系數Deq和等效慣量Jeq均增大,fPLL超調和振蕩均減小,fPLL的響應特性更好。因此,故障期間減少ki有利于提高直驅風電并網逆變器的暫態同步穩定性。
4 結束語
本文研究了電網對稱短路下直驅風電并網逆變器的暫態同步過程,詳細分析了暫態同步過程中直驅風電并網逆變器頻率fPLL和等效功角δ的響應特性。在Matlab/Simulink仿真平臺下,搭建了直驅風電并網逆變器的時域仿真模型,仿真分析了直驅風電并網逆變器在LVRT期間的暫態同步過程,仿真結果與理論分析一致。研究表明,電網電壓跌落使得直驅風電并網逆變器等效阻尼系數下降,會引起并網逆變器的頻率出現較大超調和振蕩,惡化直驅風電并網逆變器的暫態同步性能,并且故障程度越深,并網逆變器暫態穩定性越差。在故障期間,降低鎖相環積分系數可以提高直驅風電并網逆變器等效阻尼系數和等效慣量系數,有利于提高系統暫態穩定性。本文研究結果可為電網故障下直驅風電系統并網逆變器鎖相環參數設計提供指導,從而提高新能源并網的暫態穩定運行能力。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39