協方差交叉融合的慣性/衛星/雷達組合導航研究
2021-11-19 12:59:00梁祿揚
航天控制 2021年4期
周 峰 梁祿揚 林 平
北京航天自動控制研究所,北京 100854
0 引言
未來戰爭是體系與體系的對抗,機群協同編隊作為一種新型的空中力量將越來越受重視[1],特別是有人駕駛飛機與無人機混合編隊將成為一種新的作戰編隊樣式。有人駕駛飛機和無人機的導航設備通常選用慣性/衛星組合導航系統,慣性導航系統具有自主、隱蔽及短航時高精度的特點,衛星導航系統具有定位精度高、誤差不隨時間積累的特點,將兩者融合得到高精度高可靠的組合導航系統已廣泛應用于各種飛機。然而,在復雜對抗的實戰環境下,衛星導航信號容易被干擾,慣性導航定位誤差隨時間而積累,對單個飛機來講,若沒有其他輔助導航系統對其進行修正,定位誤差的迅速增長使其無法長時間使用。通過相對測量手段,有效利用協同編隊成員之間的相對定位信息,實現自身的導航定位,不但能夠有效降低整個編隊導航系統的成本,還能提高協同編隊機群的抗干擾能力,提升實戰化作戰水平。
國內外已有學者開展了機群編隊相對導航方面的研究,文獻[2-3]基于編隊成員相互測距的方法,實現機群組網定位,該文獻通過建立簡化的誤差模型,以編隊成員輸出計算得到的距離與測量距離之差作為觀測值,采用卡爾曼濾波對這些誤差狀態進行估計。該方法需要建立一個高維數的狀態估計模型,并且由于各成員兩兩之間均有數據通信,因此計算量和機載數據鏈通信負荷較大。文獻[4]在假設慣性導航誤差近似呈零均值高斯分布條件下,提出了一種利用成像導引頭對航路上任意未知地標被動觀測的彈群定位誤差協同修正方法保持導航精度。文獻[5]給出了自主編隊飛行計劃(Autonomous Formation Flight Project,AFFP)中所采用的基于 INS/GPS 的相對導航系統,該系統主要應用于有人駕駛飛機和無人機的相對導航狀態獲取、相對導航和編隊飛行控制技術,該方法自主性比較差,依賴于GPS信號的可用性,一旦GPS信號受到干擾,相對導航精度下降很快。
本文采用有人駕駛飛機(長機)和無人機(僚機)組成機群協同編隊模式,長機裝有高精度組合導航系統,僚機采用低成本慣導和衛星導航的組合導航系統,并裝有雷達測角測距裝置,在協同編隊飛行過程中能夠測量相對長機的角度和距離。假設僚機與長機機載數據鏈系統時間同步,則能夠實時接收長機的導航定位信息。提出慣性/衛星/雷達協方差信息融合卡爾曼濾波器,通過雷達相對定位與慣性/衛星組合導航信息融合技術,解決了機群協同作戰在衛星導航信號拒止條件下的導航精度下降問題,提升了實戰條件下僚機的導航精度與可靠性,計算簡便易于工程實現。
1 慣性/衛星組合導航卡爾曼濾波器
僚機導航系統采用基于偽距偽距率的緊組合導航方案,組合導航卡爾曼濾波器建模時用到的坐標系有北東地導航坐標系(用n表示)、慣性坐標系(用i表示)、地球坐標系(用e表示)和機體坐標系(用b表示)。
1.1 系統狀態方程
卡爾曼濾波器的系統狀態變量為
其中狀態量分別為慣導系統3個方向的速度誤差、姿態誤差、加速度計常值誤差和陀螺常值誤差。卡爾曼濾波器位置、速度和姿態誤差方程為
(1)

(2)
(3)

1.2 觀測量
計算INS偽距、偽距率時,第i顆可見導航衛星對應INS偽距、偽距率可由以下公式計算:
(4)

(5)
式中:Xs,Ys,Zs,Vxs,Vys和Vzs分別表示第i顆可見導航衛星的位置、速度在導航坐標系中的分量。
將INS偽距、偽距率與接收機輸出的偽距、偽距率作差作為量測量:
(6)
(7)
2 雷達相對定位卡爾曼濾波器
雷達相對定位卡爾曼濾波器建模時,使用僚機開始相對導航時刻長機質心為坐標原點的北東地地理坐標系,簡稱相對導航坐標系。
2.1 系統狀態方程
選取長機與僚機相對位置分量和相對速度分量作為狀態向量,
(8)
式中:xmt,ymt和zmt為長機在相對導航坐標系下的位置分量,Vxmt,Vymt和Vzmt為其速度分量;xdt,ydt和zdt為僚機在相對導航坐標系下的位置分量,Vxdt,Vydt和Vzdt為其速度分量。
狀態方程為
(9)
(10)
(11)

2.2 觀測量
僚機通過雷達對長機進行觀測測量[6],可以獲得僚機與長機的相對距離ρ,相對方位角qT,相對俯仰角qD。
(12)
由狀態變量表示的量測變量函數關系為:
(13)
3 慣性/衛星/雷達協方差交叉航跡融合
3.1 協方差交叉航跡融合
將雷達相對定位的結果與慣性/衛星組合導航結果在北東地導航坐標系下采用協方差交叉航跡融合,慣性/衛星/雷達協方差交叉航跡融合包括2個濾波器,分別為前兩章給出的GPS/INS緊組合卡爾曼濾波器和主動雷達定位卡爾曼濾波器。航跡融合的結構圖如圖1所示。
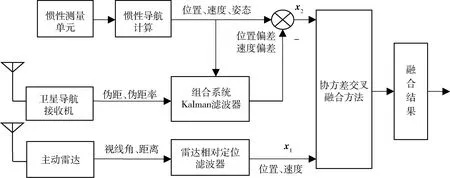
圖1 慣性/衛星/雷達航跡融合框圖
將雷達相對定位濾波器輸出的結果轉換到北東地導航坐標系下,設為x1,作為局部航跡1;選取慣性衛星緊組合濾波器輸出的位置x2為局部航跡2,使用協方差交叉融合卡爾曼濾波器對局部航跡1和局部航跡2進行融合,該濾波器的實際精度高于每個局部濾波器的精度,應用協方差交叉融合方法的卡爾曼濾波器[7-8]為
(14)
(15)
(16)
其中權系數β∈[0,1],且滿足
(17)
式中:P1和P2分別為局部航跡1和局部航跡2的誤差協方差矩陣,tr為矩陣的跡,權系數β可根據式(17)用Fibinacci法[9]最優化問題搜索求解得到。這里β=0.31。
當衛星導航信號受到干擾,慣性/衛星組合導航輸出的位置由于慣性器件的誤差會產生漂移,定位誤差變大,局部航跡1和局部航跡2隨時間增加差異會變大,此時協方差交叉融合方法的卡爾曼濾波器輸出的結果誤差變大,需要重新設定權系數β。
3.2 航跡融合決策
慣性/衛星/雷達協方差交叉融合方法在使用時需考慮傳感器測量信息的狀態,本文提出使用決策邏輯判斷來調整融合權系數。決策邏輯根據決策統計距離D和決策樹進行航跡融合選擇,決策樹的結構如圖2所示。門限T是根據兩條局部航跡相距的最大允許程度確定的,若統計距離D小于門限T,就意味著兩個局部傳感器所給出的兩條航跡非常接近,采用最優協方差交叉融合算法生成航跡;如果統計距離D大于門限T,就需要優化協方差交叉融合算法參數,從而生成系統航跡。
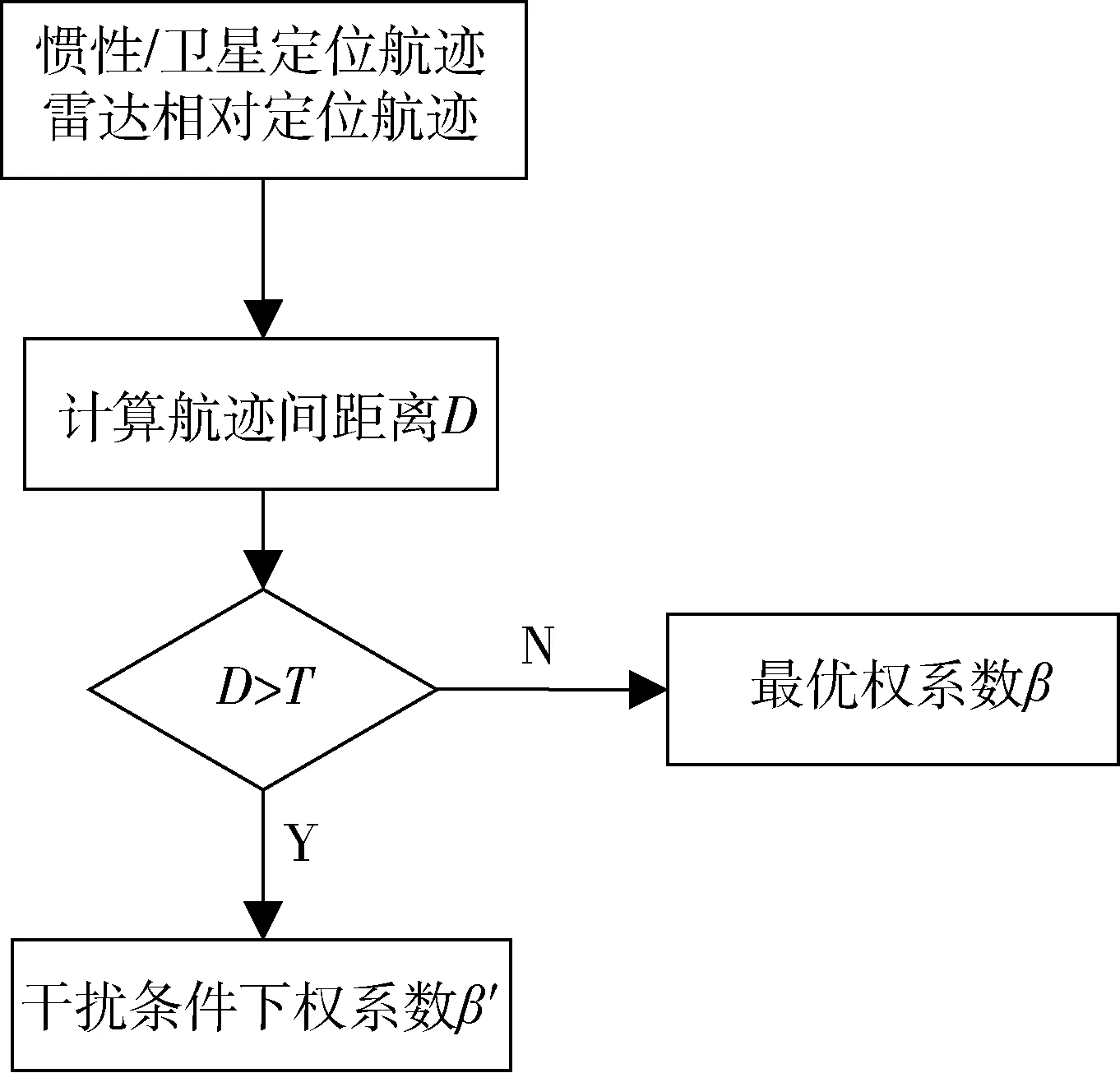
圖2 多模型融合決策樹
設P1和P2分別為估計x1和x2的誤差協方差陣。統計距離D定義為局部航跡之間的距離[9]:
D=(x1-xTF)T(P1+PTF)-1(x1-xTF)
(18)
由于:
P1+PTF=P1(P1+P2)-1(P1+2P2)
(19)
x1-xTF=P1(P1+P2)-1(x1-x2)
(20)
則:
D=(x1-x2)T(P1+P2)-1P1(P1+2P2)-1(x1-x2)
(21)
統計距離D實際上是度量局部航跡1和局部航跡2接近程度的一個量。在衛星導航信號正常的情況下,兩條航跡很接近,兩個濾波器正常工作,可以采用最優權系數β計算系統的航跡輸出。若D>T,則表示經過慣性/衛星組合導航濾波器校正后的輸出誤差較大或者發散,此時使用新的權系數β′=0.93,降低慣性/衛星組合導航輸出的航跡在融合后輸出中的比重,確保融合后的航跡精度。
4 仿真結果與分析
4.1 仿真條件
在北東地導航坐標系下描述長機與僚機的運動,長機的位置方程為:
rx=50t+5cos(0.01t)
(22)
ry=1000sin(0.04t)
(23)
rz=-5t
(24)
僚機的位置方程為:
rx=50t+5cos(0.01t)+2cos(0.001t)-1000
(25)
ry=1000sin(0.04t)+2cos(0.001t)-1500
(26)
rz=-5t+4cos(0.001t)
(27)
僚機雷達測角誤差為0.3°,測距誤差為15m。僚機慣導采用低成本IMU,誤差如表1所示。
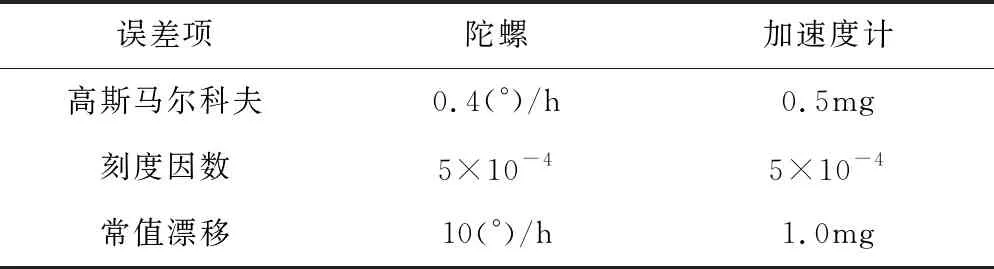
表1 子慣導IMU的誤差
4.2 仿真結果
協同機群起飛后,僚機90s開始雷達測量,慣性/衛星/雷達協方差交叉融合卡爾曼濾波航跡輸出結果如圖3~ 5所示。從圖中可以看出,經融合后的定位精度在1.5m以內。曲線中的鋸齒形波動主要由雷達測角誤差引起,通過與慣性衛星組合導航結果融合后,該波動明顯減小。
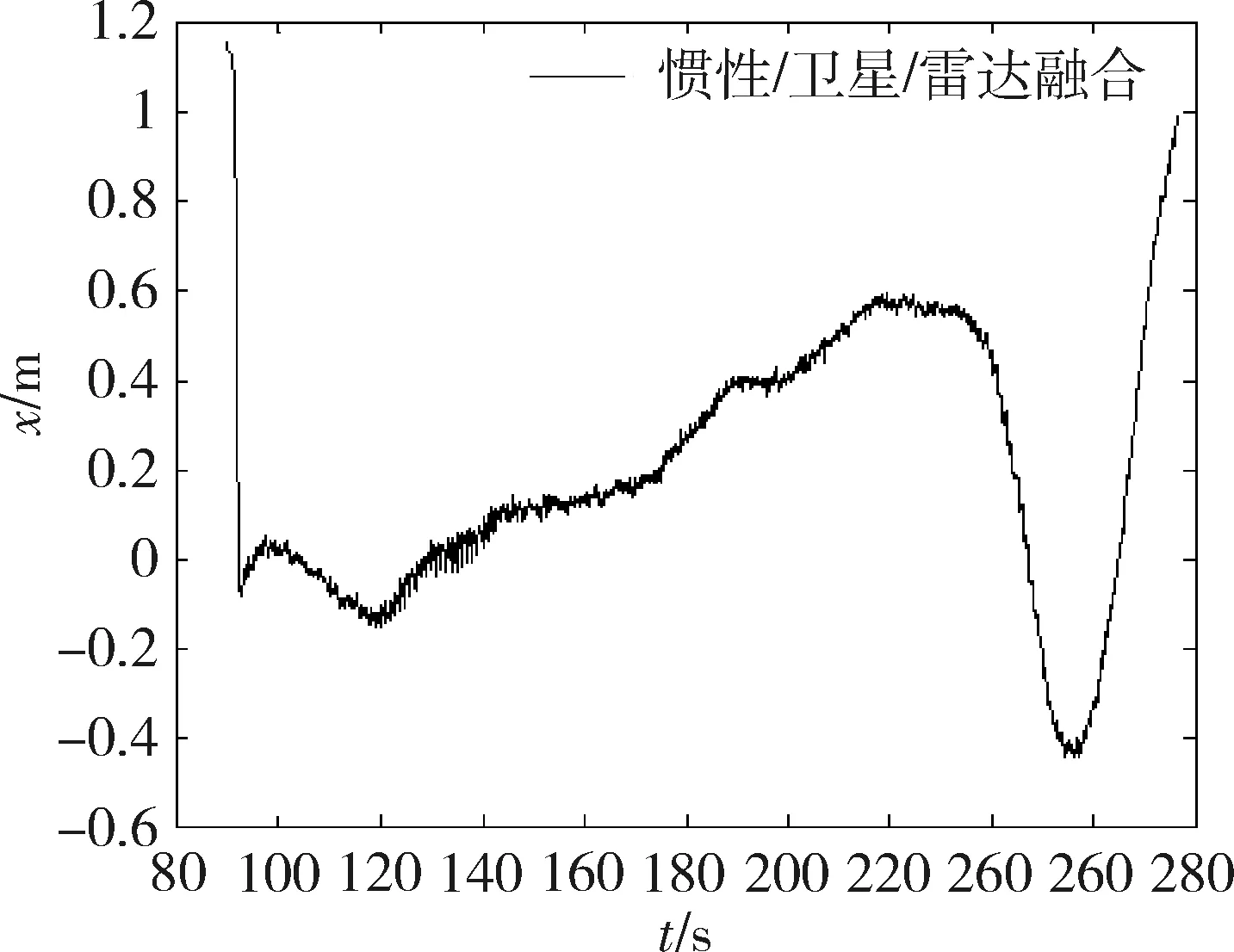
圖3 航跡融合后x方向位置誤差
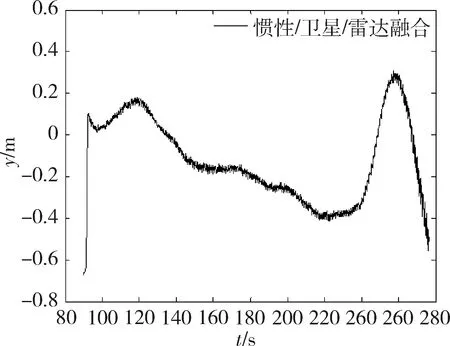
圖4 航跡融合后y方向位置誤差
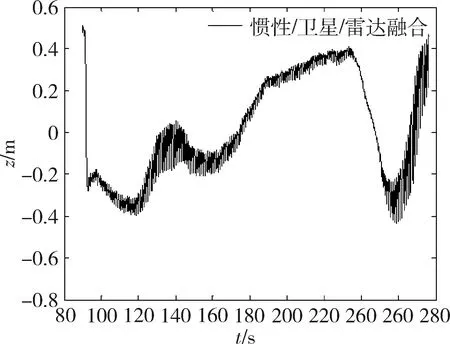
圖5 航跡融合后z方向位置誤差
起飛后120s~240s之間衛星導航信號丟失,經航跡決策判斷慣性/衛星/雷達協方差交叉融合使用新的權重系數,航跡輸出的仿真曲線如圖6~ 8所示。從圖中可以看出,衛星導航信號丟失后,所提出的慣性/衛星/雷達協方差交叉融合卡爾曼濾波器的x和z方向輸出有效地抑制了位置誤差變大。當衛星導航信號恢復后,定位精度立即恢復到衛星信號丟失前的水平。

圖6 航跡融合結果與慣性/衛星x方向位置誤差比較
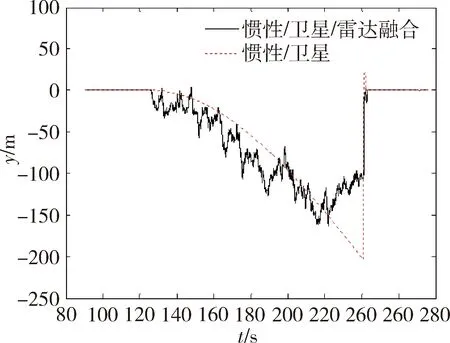
圖7 航跡融合結果與慣性/衛星y方向位置誤差比較
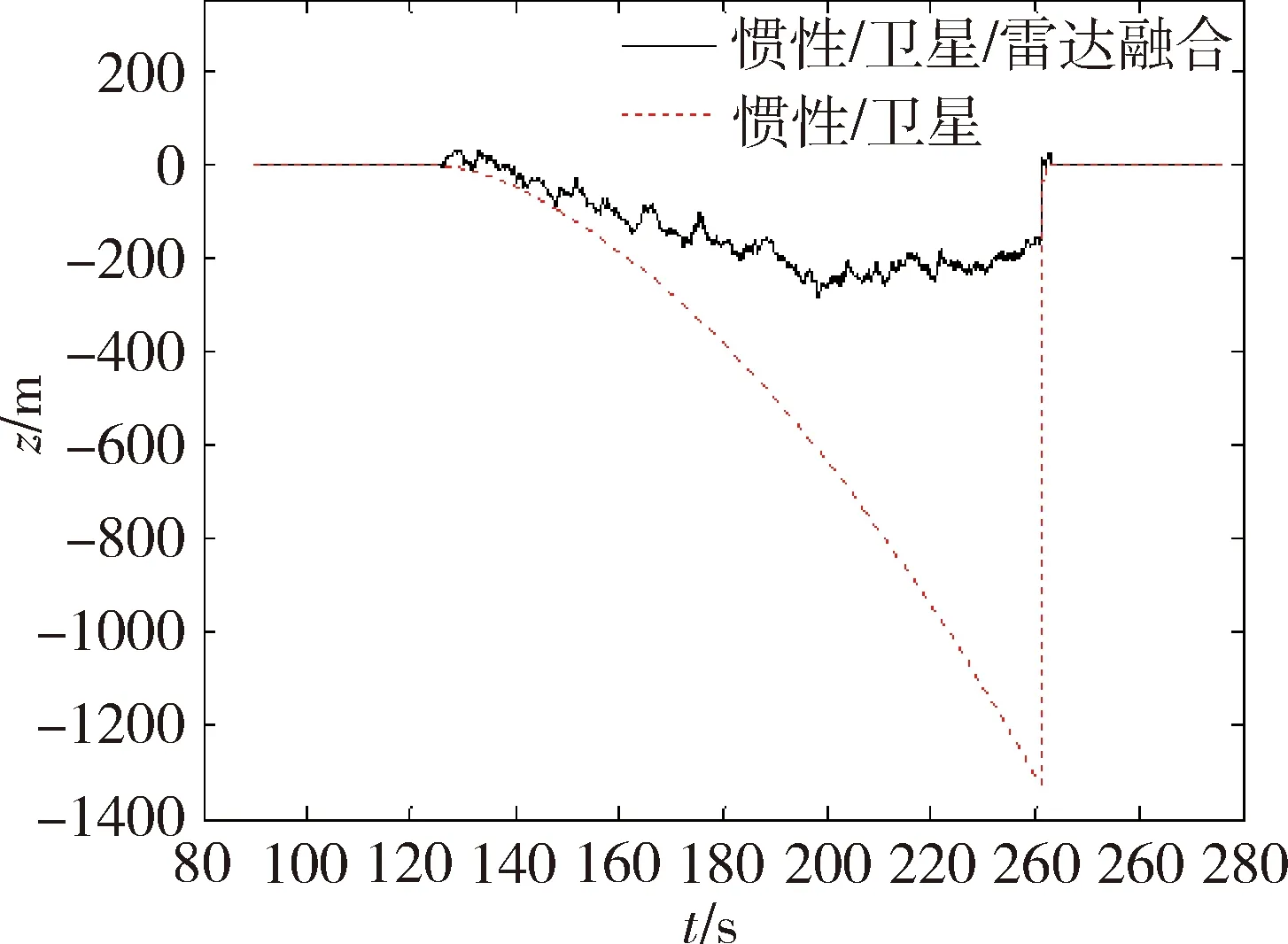
圖8 航跡融合結果與慣性/衛星z方向位置誤差比較
5 結論
在機群協同編隊中,僚機使用基于協方差交叉融合的慣性/衛星/雷達定位方法,具有高精度高可靠的特點,特別在衛星導航受干擾不可用的情況下,能夠有效地抑制慣性導航誤差漂移,提升了機群協同編隊的作戰性能。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28