基于智能PID和擴張狀態觀測器的姿態控制方法*
2021-11-19 13:02:48李依彤劉曉東張惠平王曉東
航天控制 2021年4期
李依彤 劉曉東 張惠平 王曉東
1.北京航天自動控制研究所,北京 100854
2.宇航智能控制技術國家級重點實驗室,北京 100854
3.中國運載火箭技術研究院,北京 100076
0 引言
PID控制器以其結構簡單易于實現的優點被廣泛應用于各種實際工程中,飛行器姿態控制也不例外[1]。飛行器的控制參數設計通常是采用增益調度的方法:首先由設計人員針對不同的特征點設計出多組PID控制參數,然后再將這些參數裝載于飛行器上,并按照一定的準則調度進行提取,實現控制參數的變化。這種方法對設計人員的經驗能力有很高的要求,且設計繁瑣,耗費資源。因此迫切需要能夠自適應調整飛行器姿態控制的參數。
自適應控制被提出以來,各種控制方法層出不窮,而模型參考自適應是其中一個重要且發展較為成熟的分支[2]。模型參考自適應控制是以理想模型的輸出狀態為參照來調整自適應機構,進而使被控對象的輸出跟蹤理想模型輸出。另外這種控制方法能夠平緩系統過渡過程,降低系統響應超調量,降低控制量,在一定程度上減小了控制能量的浪費。近年來,得益于計算機技術的發展,模型參考自適應控制技術逐漸成熟,不僅能夠與其他控制技術相結合[3],在機械手臂控制[4-5]、電動汽車充電[6]和航空發動機[7]等領域都有相關研究和應用。
神經網絡出現以來,就成為了各界學者的研究熱點,主要是因為其能夠通過學習逼近任意復雜的非線性關系,具有較強的容錯性和魯棒性,在某種程度上能夠處理系統的不確定性。在控制領域,神經網絡的出現更加促進了自適應控制的發展。文獻[8]和文獻[9]均是用神經網絡實現了對被控對象不確定性和擾動部分的逼近,并與傳統算法相結合。在飛行器姿態控制方向,雖然也有一些神經網絡整定控制參數的相關研究[1,10],但大多是針對某一特征點進行設計,未將研究對象擴展到整個飛行段。
本文提出了一種基于模型參考自適應控制框架的神經網絡PID姿態控制方法。神經網絡選用了結構簡單的BP神經網絡,網絡輸入選擇能夠表征助推段飛行狀態的視速度和參考模型與被控對象輸出之差,對PID控制參數增益進行整定。引入視速度后可以提高控制器的適用范圍,從而實現全飛行包絡的自適應控制。為保證系統抗干擾性,加入了兩階線性擴張狀態觀測器(Extended State Observer,ESO),并對其進行了誤差分析,從理論上證明兩階LESO能夠較為準確的對系統狀態進行估計。最后以某導彈主動飛行段俯仰通道為研究對象進行仿真驗證,仿真結果表明本文的姿態控制方法能夠較好地實現姿態控制指令的跟蹤。
1 導彈運動模型建立
以某導彈主動飛行段俯仰通道為研究對象,該導彈俯仰與偏航通道采用擺動噴管進行姿態控制,滾轉通道采用空氣舵進行姿態控制,因此各通道可以獨立設計,建立其俯仰通道的小偏差線性化數學模型為
(1)

(2)
其中,Δθ為彈道傾角偏差,單位為rad;Δα為攻角偏差,單位為rad;Δφ為俯仰角偏差,單位為rad;Δδφ為俯仰通道姿控噴管擺角,單位為rad。c1f為俯仰通道與推力和升力有關的動力系數,單位為1/s;c2f為俯仰通道重力系數,單位為1/s;c3f為俯仰通道控制力系數,單位為1/s;b1f為俯仰通道氣動阻尼力矩系數,單位為1/s;b2f為俯仰通道氣動力矩系數,單位為1/s2;b3f為俯仰通道控制力矩系數,單位為1/s2。

(3)
2 基于BP神經網絡的PID參數調節模型設計
在模型參考自適應控制框架的基礎上,系統控制框圖設計如圖1所示。俯仰角程序指令φcx同時作用于參考模型和原俯仰通道閉環控制系統,輸出分別為φm和φ,二者之差為φe。BP神經網絡輸入選擇φe、視速度WX1以及偏置值1(未在框圖中畫出)。在此條件下,通過訓練網絡實現PID控制參數的自適應調節。
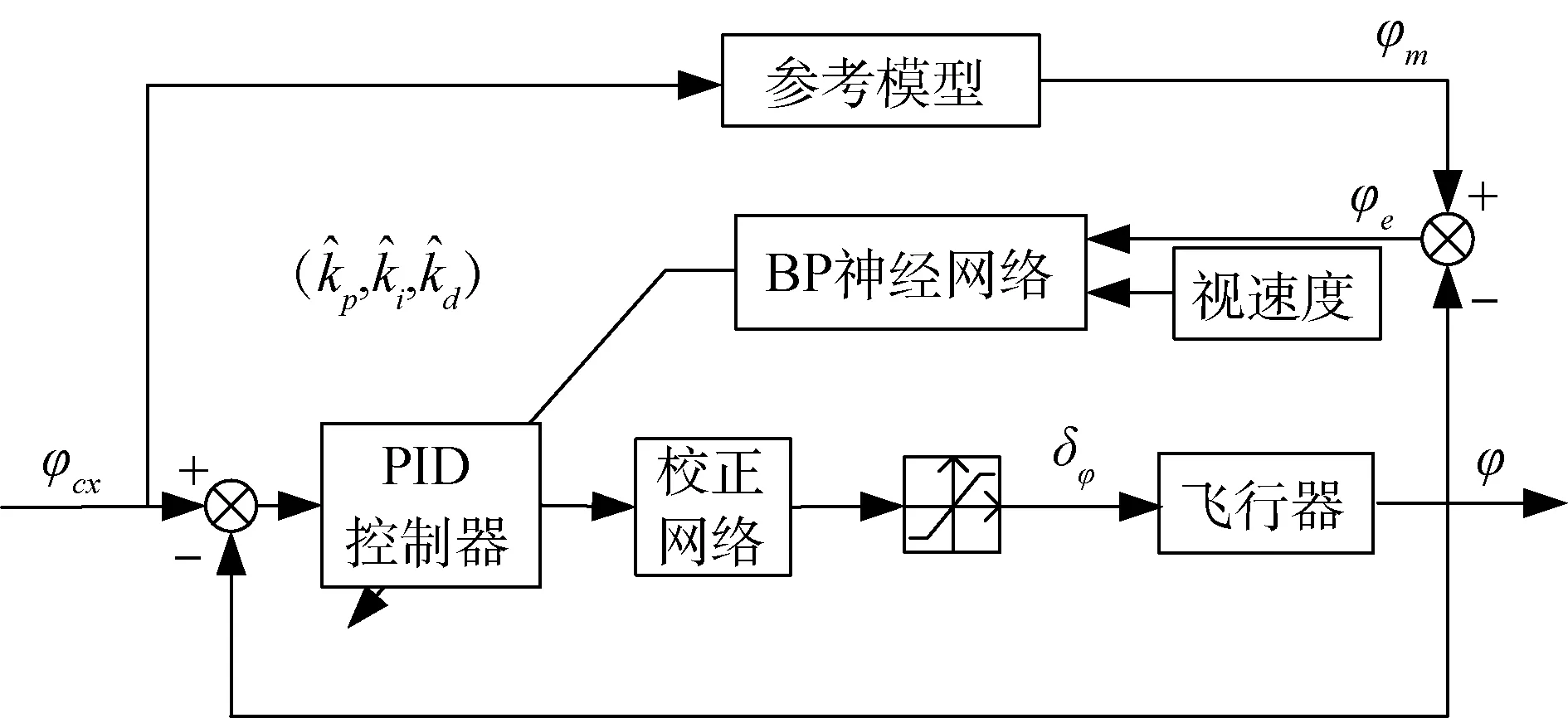
圖1 模型參考自適應控制方案框圖
2.1 BP神經網絡基本框架
選用了三層BP神經網絡,包含輸入層I,隱含層H和輸出層O,網絡結構如圖2所示。
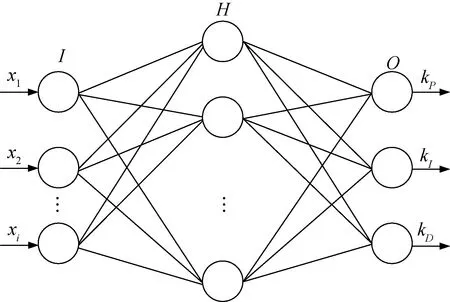
圖2 BP神經網絡結構
輸入層I的神經元節點輸入與輸出相同,表示為:
(4)
式中:上標in和out分別指神經元的輸入和輸出,k指當前時刻,M為輸入層神經元的個數。顯然,本文中M取3。
隱含層H的輸入、輸出分別為:
(5)
(6)
式中:wih為輸入層和隱含層之間的網絡權重,N為隱含層神經元的個數;隱含層神經元的激活函數一般選用關于原點正負對稱的Tan-Sigmoid函數:
(7)
輸出層O的輸入、輸出分別為:
(8)
(9)
式中:who為隱含層和輸出層之間的網絡權重。神經網絡輸出為PID參數,也可以表示為:
(10)
(11)
(12)
PID參數的輸出系數為2.5、0.01和0.25。由于PID參數不能為負數,因此輸出層神經元的激活函數為非負的Log-Sigmoid函數:
(13)
2.2 BP神經網絡權值更新率設計
選取性能指標函數為:
(14)
式中:yd(k)為期望輸出,y(k)為實際輸出,取二者之差的平方作為網絡訓練的性能指標,訓練的最終目標是使J(k)收斂到最小值。采用最速下降法來對各層神經網絡權重進行調制。訓練時,沿著性能指標減小的方向,從輸出層開始逐層向前進行修正。因此應計算J(k)對who的梯度,輸出層和隱含層之間的網絡權重的增量為:
(15)
式中:η3>0為學習速率,α3>0為動量因子,α3Δwho(k-1)為慣性項。上式表示網絡權重系數的修正和2部分有關:1)當前時刻J(k)對who的梯度值;2)前一時刻權值更新的方向和幅度,這樣一定程度上增加了權值更新的慣性,使網絡訓練具有了一定的抗震蕩能力,同時也能加速網絡的收斂。
然后根據鏈式求導法則和誤差反向傳播算法即可求出神經網絡權值更新率,文獻[2]中有詳細原理推導,在此不再贅述,最終得到輸出層和隱含層之間的權值更新率為:
(16)
(17)
隱含層到輸入層之間的權值更新率為:
(18)
(19)
式中,η2>0為學習速率,α2>0為慣性系數。
3 線性擴張狀態觀測器設計
擴張狀態觀測器是自抗擾控制的核心組成部分,它將被控對象的輸入量和輸出量作為輸入,能夠將內部不確定性和外部擾動擴張為新的變量估計出來,并實現對控制量的補償[11]。將非線性ESO簡化為LESO,降低了需要調整的參數的數量,因此也被推廣到實際工程應用中。圖3為加入LESO后的模型參考自適應控制方案框圖,圖中的觀測器為三階,若為兩階觀測器,則觀測器輸出為z1和z2,b的取值與系統特性有關,此時b=b3f。那么補償后的控制量可以用式(20)表示:
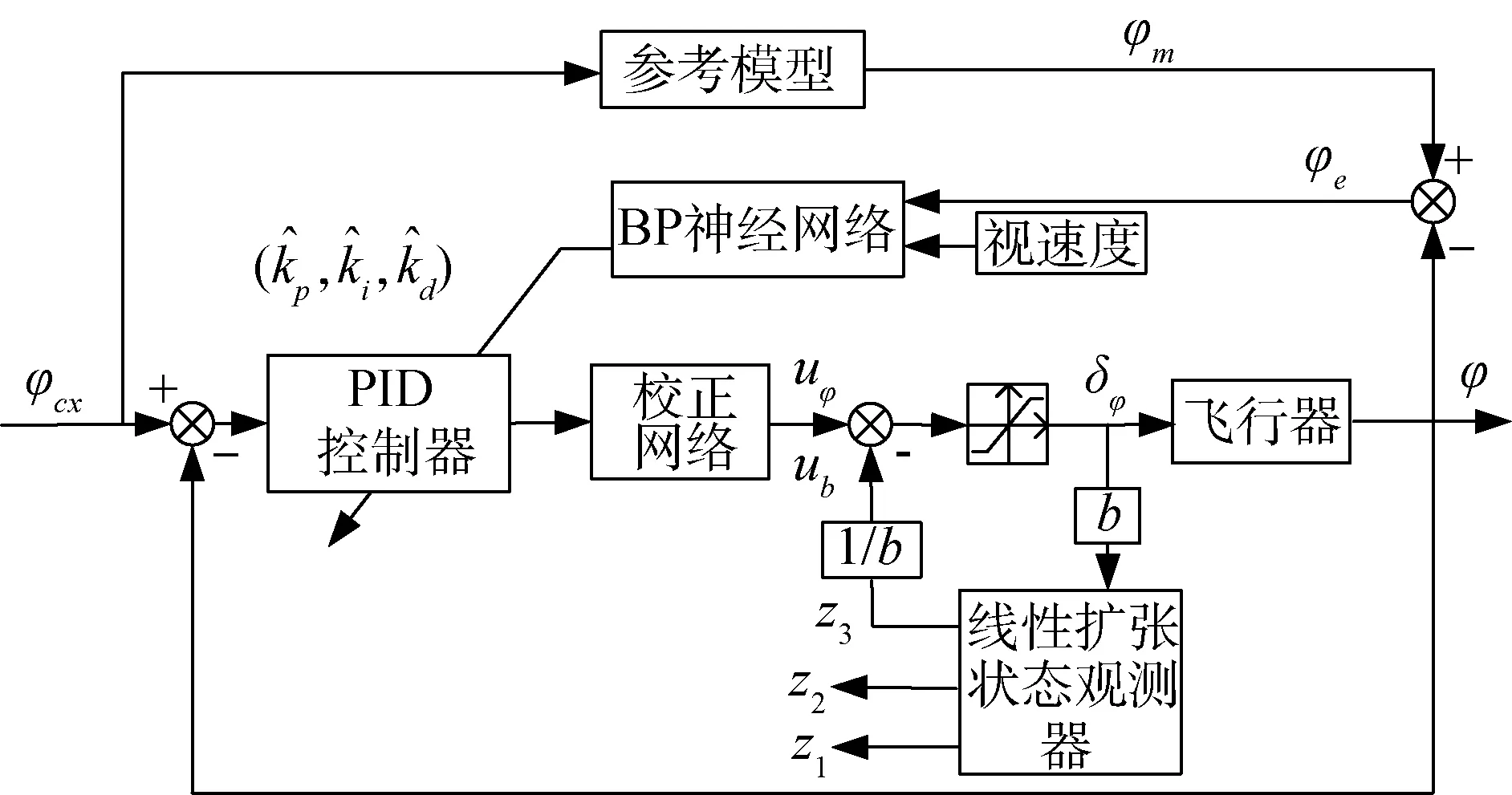
圖3 加入LESO后的模型參考自適應控制方案框圖
δφ=uφ-ub
(20)

(21)

(22)
上式的擴張狀態觀測器可建立如下:
(23)
式中:z1和z2是LESO的輸出,z1是被控對象俯仰角速度的估計值,y1是被控對象俯仰角速度輸出值,z2是總干擾ξ的估計值。l1和l2是擴張狀態觀測器的增益值。
對式(23)進行拉式變換并整理可以分別得到由觀測器輸入u,y1到z1和z2的傳遞函數:
(24)
式中,特征方程為Δ=s2+l1s+l2。

下面對LESO進行誤差分析,首先定義估計誤差為:
(25)
結合式(23)和(25),可以得到:
(26)
(27)

結合式(24)和(25),可以得到:
(28)
顯然觀測器的輸入u和y1必然是有界的,則可以得到觀測器的穩態誤差為:
(29)
從理論上可以證明兩階的線性擴張狀態觀測器能夠較為準確的跟蹤系統狀態和干擾項。
4 仿真實驗與分析
分別按照圖1和3所示的控制方案,在MATLAB的Simulink工具箱中搭建控制系統框架進行仿真,仿真步長設置為5ms。參考模型選取如式(30)[2]:
(30)
BP神經網絡選取3-10-3的結構,學習速率0.5,動量因子0.05,神經網絡初值選取[-0.5,0.5]之間的隨機數。在導彈飛行過程中,其彈體模型在不斷變化,因此對式(3)中各個小偏差方程的系數按照時間做插值處理,即自變量為導彈飛行時間,因變量為各個小偏差系數,具體變化范圍:b1f為0,b2f為[-0.439,-1.671],b3f為[28.045,101.093],b2f為負數說明導彈在此飛行過程中一直處于靜不穩定狀態。導彈二級主動段飛行時間為35s,姿控噴管最大擺角為4.2°。在本文設計的控制方案下,BP神經網絡根據網絡輸入進行權值更新,經過多次前向計算和誤差反向傳播,最后獲得一組收斂的權值。仿真時,將收斂后的網絡權值送入網絡,進行一次前向計算得到仿真結果。
4.1 姿態控制結果分析
圖4和5中,導彈的俯仰角輸出曲線和俯仰角指令具有良好的一致性,剛開始跟蹤誤差較大,但很快誤差下降到0.5°以內,屬于可接受范圍。圖6是俯仰通道姿控噴管擺角曲線,在最大限幅以內。圖7是PID控制參數自適應調整曲線,其參數變化規律和實際工程較為相似,并且由圖8的開環系統伯德圖和表1中的裕度統計可以看出,此時控制系統的相位裕度均大于30°,幅值裕度均大于4dB,滿足工程實際需求。
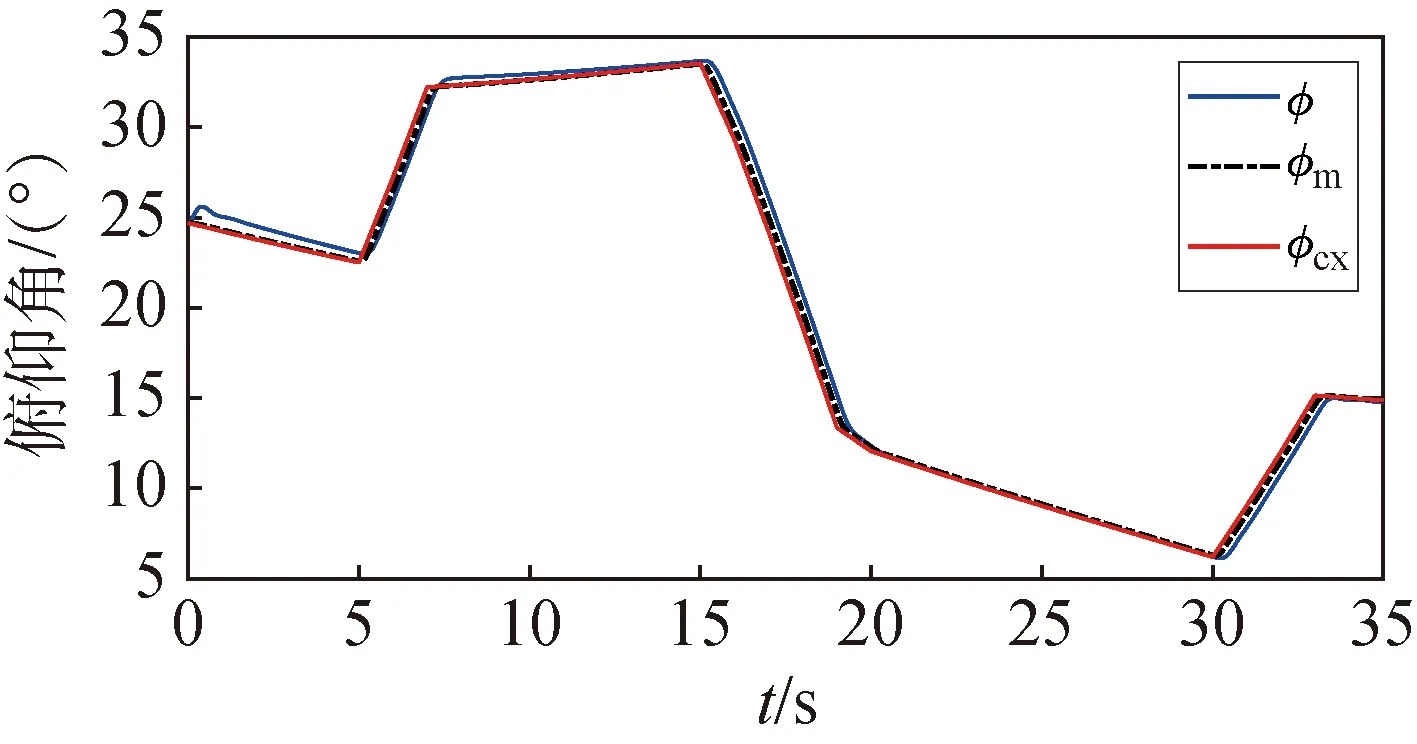
圖4 俯仰角指令跟蹤曲線
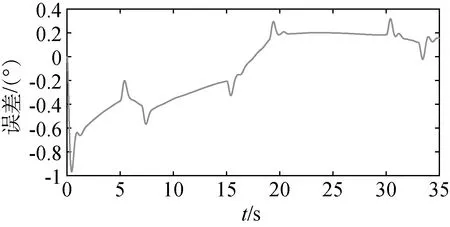
圖5 俯仰角跟蹤誤差曲線
圖6 噴管擺角曲線
圖7 控制參數曲線
圖8 開環系統伯德圖
表1 裕度統計表
4.2 加入LESO后姿態控制結果分析
為了進一步提高姿控系統在干擾條件下的魯棒性,按照式(23)搭建LESO,ω0取10rad/s,加入觀測器后的仿真結果如下:
在運行1s時分別加入外部常值干擾fd=2/57.3×1(t)和正弦變化干擾fd=2/57.3sin(0.2t),圖9是在加入干擾后不同情況下俯仰角誤差曲線的收斂情況。可以看出,未加入擴張狀態觀測器之前,只在PID控制器的作用下,系統的抗干擾性能極差,無法抵抗外界擾動。加入LESO后,系統能夠快速抑制外界干擾帶來的影響,提高姿態控制系統的魯棒性,動態性能較好。并且通過對比加入兩階和加入三階觀測器的曲線可以發現,在加入相同常值干擾的情況下,二者的俯仰角跟蹤誤差最大值分別為0.93°和0.68°,而加入相同正弦變化干擾時的跟蹤誤差最大值分別為0.21°和0.16°。兩階LESO更能夠減小擾動對姿態角跟蹤的影響,這是因為擴張狀態觀測的階數越高,相位滯后越嚴重,降低系統的快速性[13]。
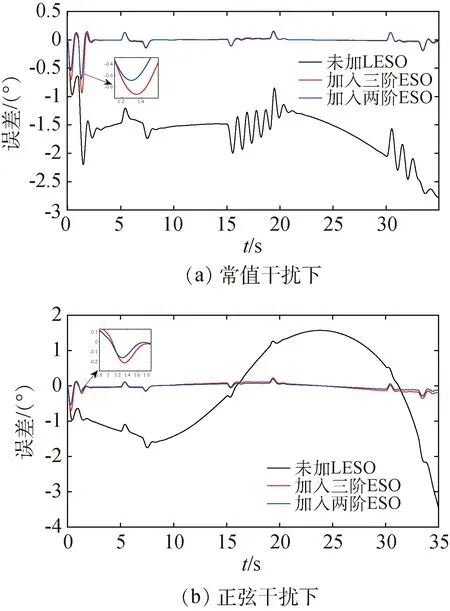
圖9 不同情況下俯仰角的跟蹤誤差曲線
圖10~13是常值干擾下加入兩階LESO的仿真結果。在1s時加入常值干擾后,俯仰角會有突變,但在很短時間內重新跟蹤俯仰角指令,俯仰角跟蹤誤差在0.5s內快速收斂,并在±0.2°以內浮動,觀測器輸出的干擾估計量與理論值會有一定偏差,但是俯仰角速度估計值與理論值一致性較好,能夠實現較為準確的指令跟蹤。
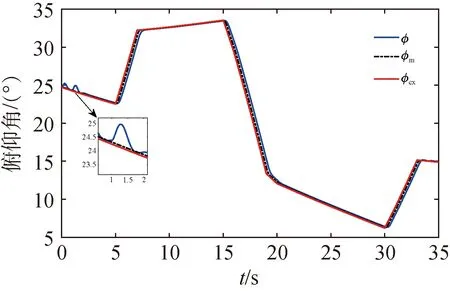
圖10 常值干擾下加入兩階LESO的俯仰角指令跟蹤曲線
圖14~17是在正弦變化干擾后加入兩階LESO的仿真結果。在1s時加入正弦波變化的干擾,和加入常值干擾時類似,姿態角會產生突變但在很短時間內重新跟蹤指令,在0.5s內快速收斂,并在±0.3°的誤差以內浮動,擴張狀態觀測器對姿態角速度的估計會受正弦波干擾的影響,但影響不大,同樣能夠實現較為準確的指令跟蹤。
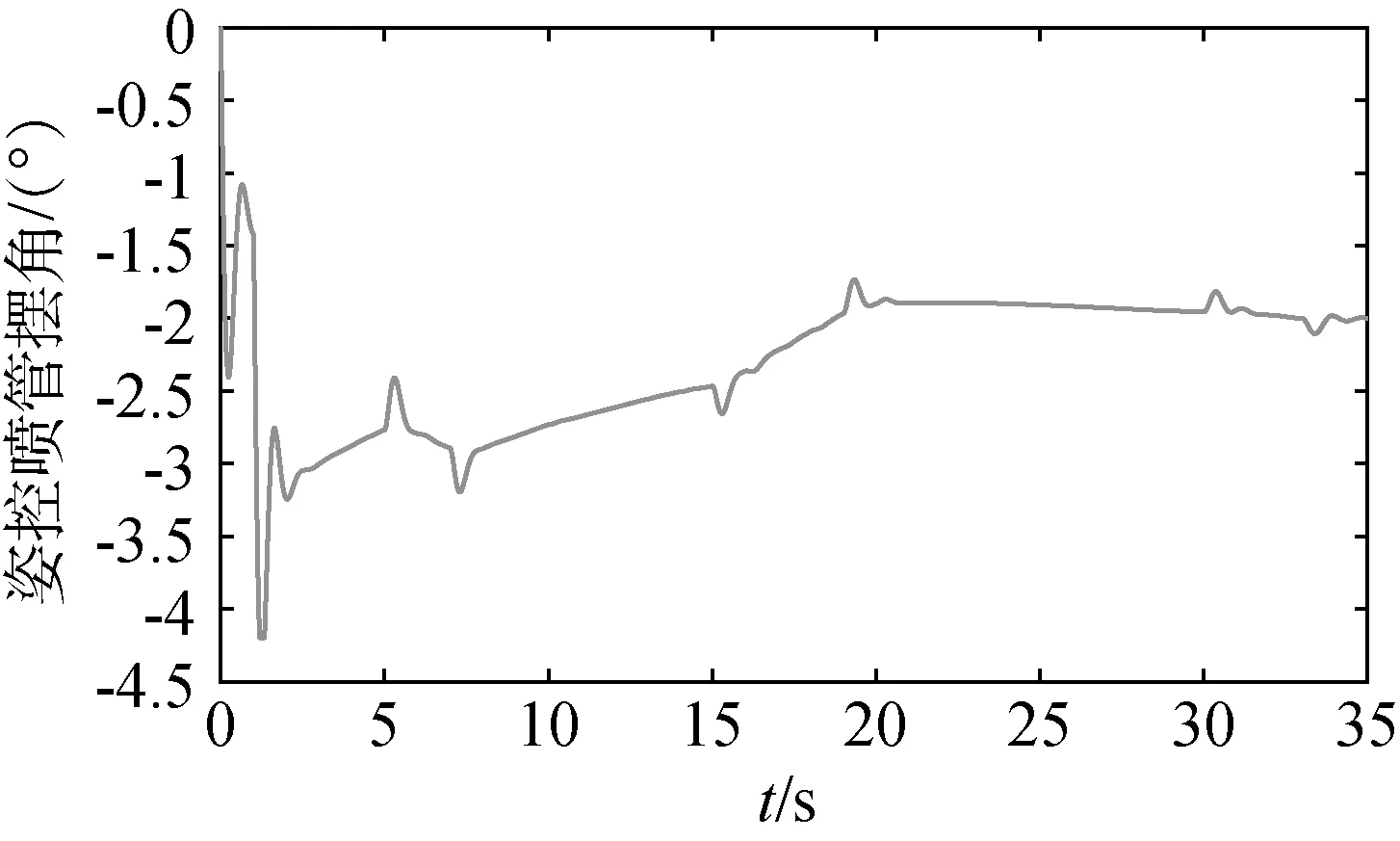
圖11 常值干擾下加入兩階LESO的噴管擺角曲線
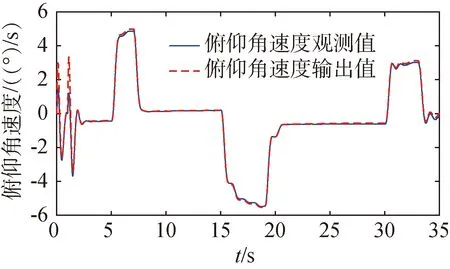
圖12 常值干擾下兩階LESO的俯仰角速度估計曲線
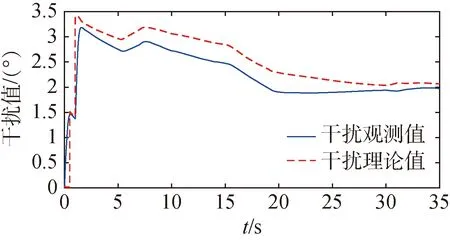
圖13 常值干擾下兩階LESO的干擾項估計曲線
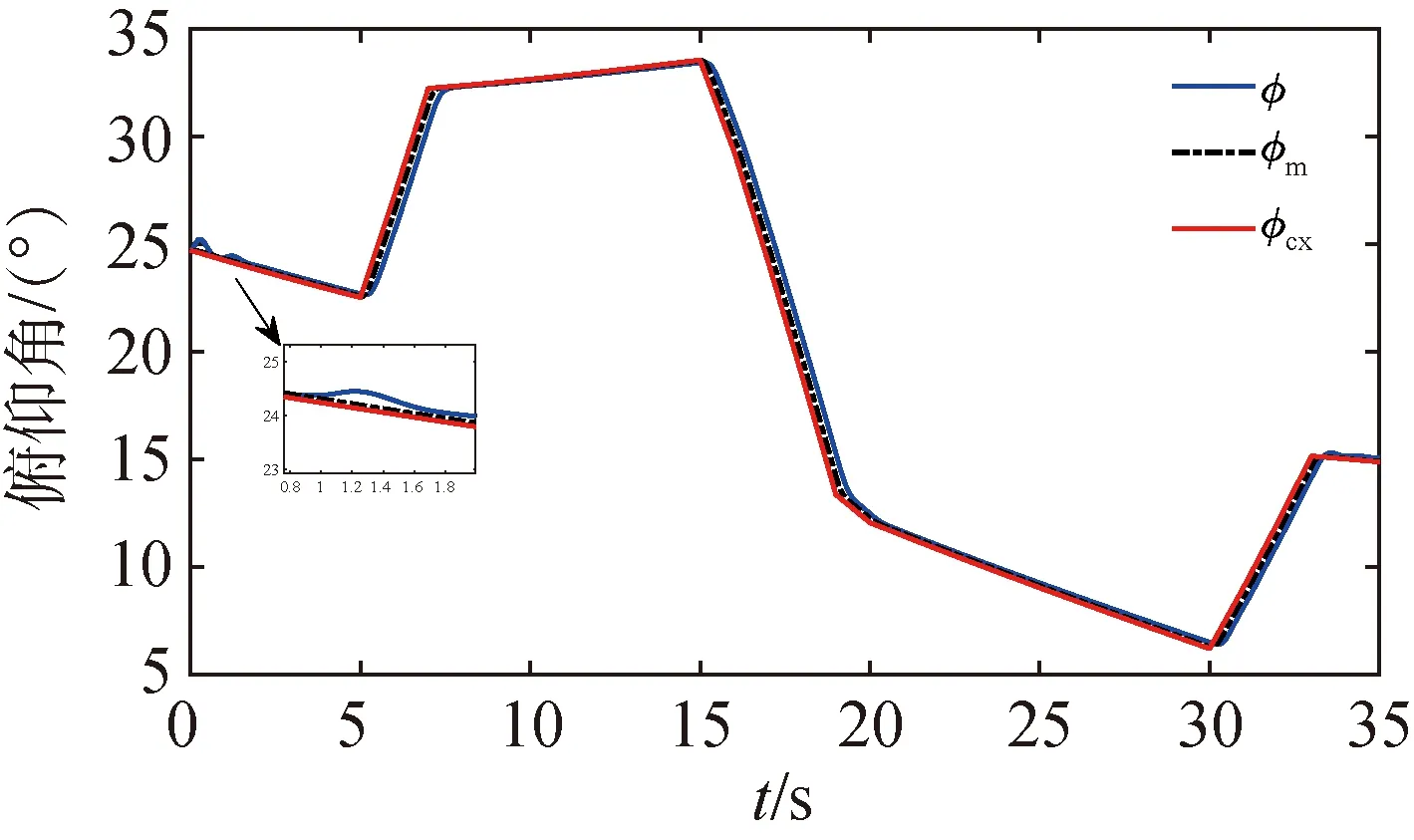
圖14 正弦干擾下加入兩階LESO俯仰角指令跟蹤曲線
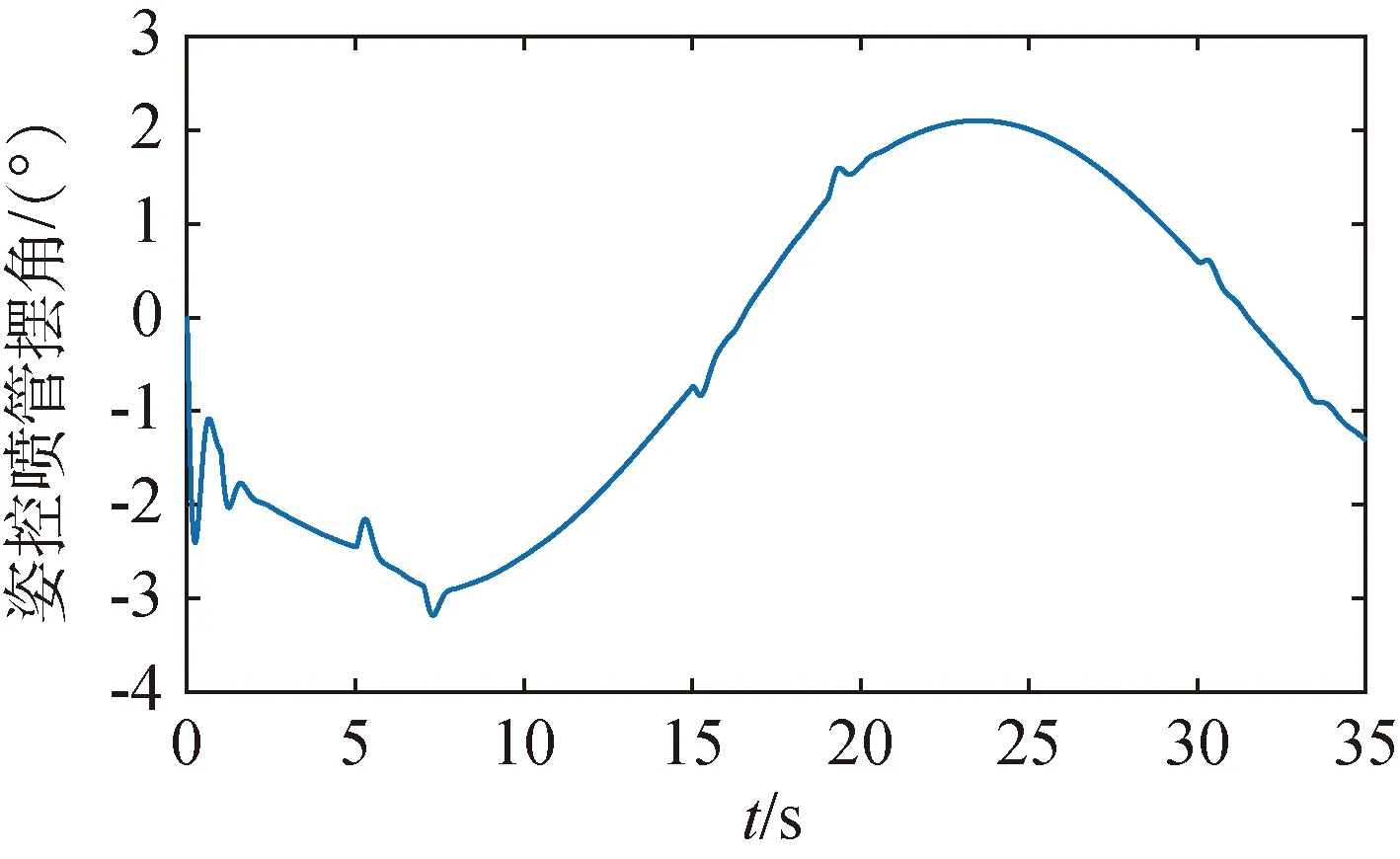
圖15 正弦干擾下加入兩階LESO的噴管擺角曲線
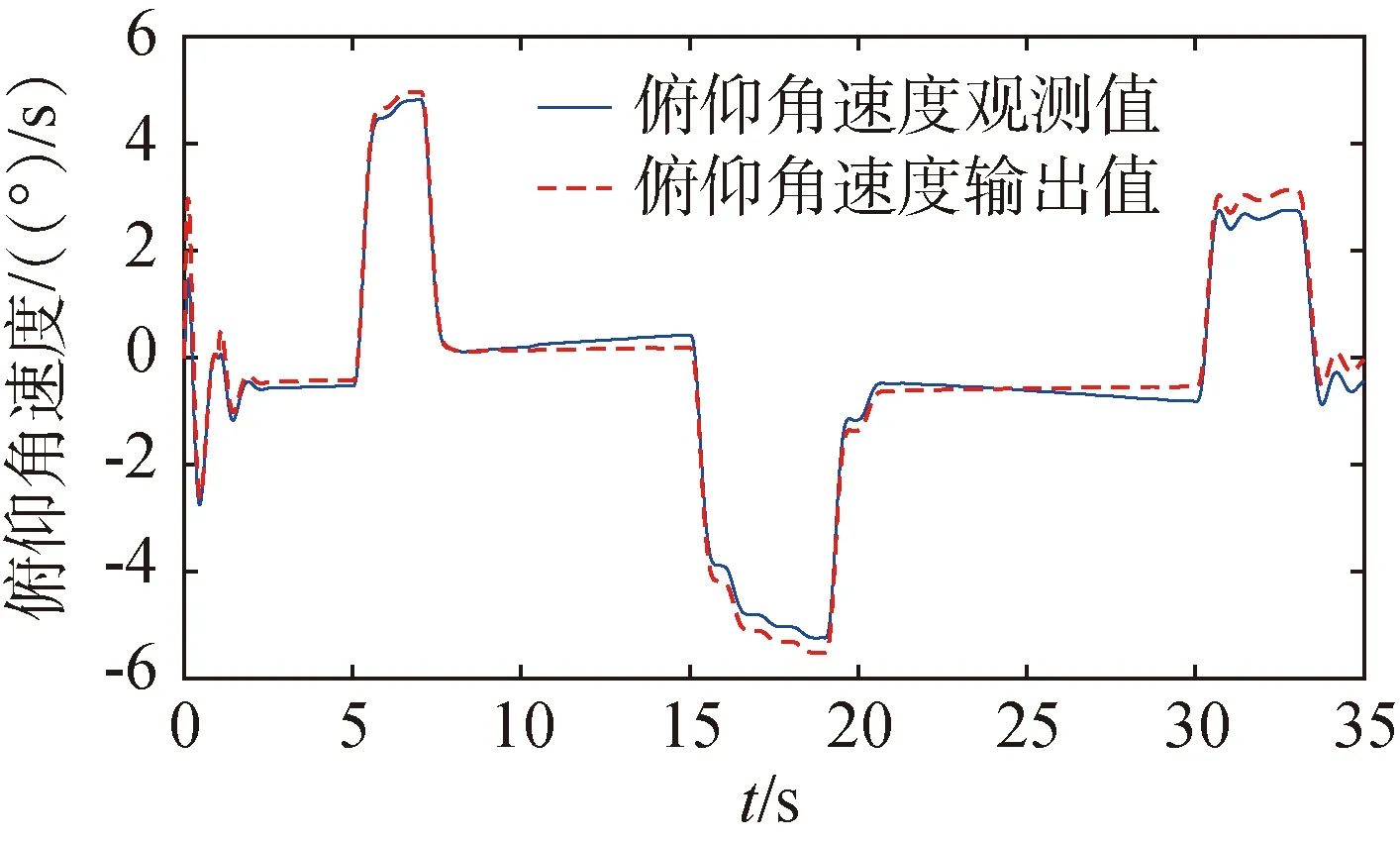
圖16 正弦干擾下兩階LESO的俯仰角速度估計曲線
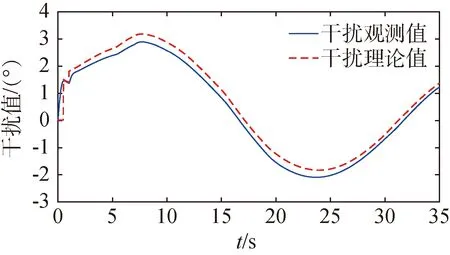
圖17 正弦干擾下兩階LESO的干擾項估計曲線
5 結論
提出了一種基于模型參考自適應控制的神經網絡姿態控制方法,并加入兩階線性擴張狀態觀測器,最終實現了姿態角指令的穩定跟蹤。主要結論如下:
1) 將表征導彈飛行狀態的視速度加入神經網絡輸入進行訓練,獲得的PID控制參數自適應調整規律和工程實際較為相近,實現了由計算機代替人工調參、提高了設計過程的智能化,且系統的開環傳遞函數的相角裕度均大于30°,幅值裕度均大于4dB,姿控噴管擺角未超出限制,滿足工程需求;
2) 在加入相同常值干擾的情況下,加入三階LESO和兩階LESO的俯仰角跟蹤誤差最大值分別為0.93°和0.68°,而加入相同正弦變化干擾時的跟蹤誤差最大值分別為0.21°和0.16°,兩階的觀測器更能夠降低外界擾動對系統的影響。而且無論是加入常值干擾還是正弦變化干擾,經過兩階LESO的控制量補償,姿態角指令能夠在0.5s內很快地重新跟蹤指令,實現了擾動的快速抑制,提高了系統的魯棒性能。