柔性協作機器人關節摩擦辨識
2021-11-19 13:43:50孫若懷
電子測試 2021年20期
關鍵詞:模型
孫若懷
(沈陽新松機器人自動化股份有限公司,遼寧沈陽,110168)
0 引言
隨著機器人技術的不斷發展,使用機器人代替人的繁復勞動已成為目前各行業降低成本、提高制造質量的主要手段[1]。應用行業的擴展,對機器人的易用性提出了更高的要求。因摩擦造成的位置精度和運動平穩性降低的現象在機器人啟停或低速運動時表現明顯。加之機械臂的位移放大作用,機器人關節的摩擦特性的研究具有重要的意義[2]。
1 機器人動力學模型
本文所研究的為6自由度柔性多關節機器人,采用一體化關節設計。如表1所示,建立機械臂的連桿D-H參數,根據D-H參數可以方便地構建UR機器人的運動學模型。其參數如表1所示。其中αi-1表示連桿的長度,ai表示連桿的轉角,di表示連桿的偏距,θi表示關節電機轉角。
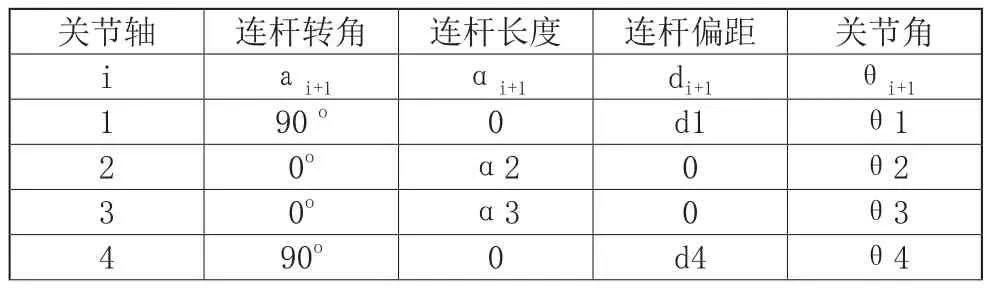
表1 機械臂的連桿D-H參數

5-90o 0 d5 θ5 6 0o 0 d6 θ6
建立柔性協作機器人動力學模型,可采用Newton-Euler方程:內推,從基座到末端,計算速度、加速度:

外推,從末端到基座,計算慣性力以及關節力矩:

2 關節摩擦辨識
2.1 基于關節電流的力矩估計
柔性機器人采用關節一體化設計,關節之間沒有運動耦合,關節伺服電機不存在相互作用;同時由于柔性協作機器人采用諧波減速機,機器人工作在電流-力矩的線性比例區域內,可通過驅動器的電流反饋對關節電機出力的估計。由于機器人存在一定程度的柔性振動,會造成機器人關節力矩估計結果有著較大的周期性浮動,由于相鄰兩個周期的力矩采集結果之間相差較大,力矩估計結果誤差較大[3]。
2.2 關節電流力矩濾波
機器人在運動過程中,各關節的驅動力矩、角速度和位移均為連續值。考慮到當前時刻關節值與以往時刻存在一定的關聯性,因此引入加權滑動平均模型來對機器人的控制指令進行修正以消除機器人的周期柔性振動,進而實現對力矩信號的濾波。該濾波器在離散域的傳遞函數為

對應在S域下的傳遞函數為




濾波后與濾波前系統相應之比為

可獲得完全濾除振動的濾波器參數

2.3 摩擦力矩辨識
通過濾波后的驅動器信息數據,可有效降低摩擦力矩的浮動范圍,降低模型辨識后的誤差。摩擦力矩模型參數可通過對力矩-角速度數據的擬合來完成[4]。
目前機器人關節摩擦力的基礎模型主要有三個選擇:①庫倫模型+粘性摩擦模型;②Stribeck模型;③n次多項式模型。
采用模型①對于摩擦力因速度而帶來的變化不夠敏感,摩擦力矩辨識后的偏差難以控制;模型②的特征是在高速段的擬合較為準確,難以準確再現啟停階段的摩力矩;模型③對機器人的滑動摩擦再現效果較好。因此選擇模型③作為摩擦模型。
3 實驗
3.1 本體實驗
實驗采用自主研發的UR型5KG關節一體化機器人。能夠完全獲取機器人運動相關數據。實驗主要針對濾波效果和摩擦模型參數辨識效果進行驗證。控制機器人第三關節做點位運動,采集機器人對比加入濾波前后的機器人關節電流估計曲線如圖1、圖2所示。

圖1 濾波前關節力矩曲線

圖2 濾波前關節力矩曲線
柔性協作機器人關節主要受力為由伺服電機提供的驅動力矩以及關節摩擦力矩,每一時刻的摩擦力矩可由如下公式計算得出。

3.2 實驗結論
從圖1、圖2可見,經過濾波后,機器人關節力矩估計結果的浮動范圍顯著減小,降低至原本的10%以下,降低了關節力矩估計的誤差。通過5次多項式模型擬合關節摩擦模型參數后,可決系數可達0.91,結合圖3可見,擬合后所得得關節摩擦模型可有效描述關節摩擦力矩隨關節角速度的變化。
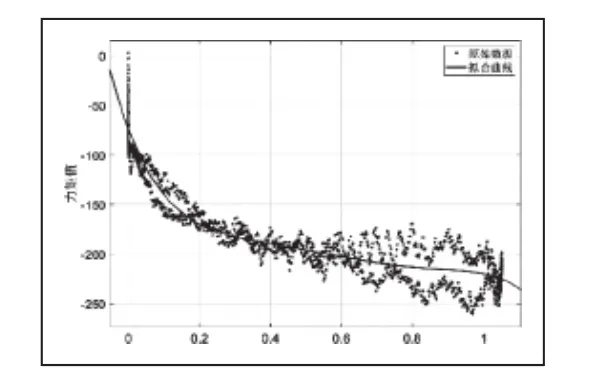
圖3 擬合前后角速度-摩擦力矩對比曲線
4 結論
本文針對柔性協作機器人關節摩擦力矩進行了研究,基于加權滑動平均模型設計了電流信號濾波器,降低了關節力矩的估計誤差;結合機器人動力學計算結果可得到機器人的摩擦力矩;通過對摩擦力矩關于關節角速度的5次多項式模型的參數辨識獲得機器人實際的摩擦力矩模型,擬合結果表明該模型可用于描述關節摩擦特性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19