抗差EKF濾波在單頻低成本接收機定位算法中的應用*
2021-11-18 11:54:04韋子豪龔櫟澎
礦山測量 2021年5期
關鍵詞:模型
韋子豪,龔櫟澎,李 韌
(華北理工大學 礦業工程學院,河北 唐山 063210)
隨著全球導航衛星系統(Global Navigation Satellites System, GNSS)的快速發展,低成本接收機因具備體積小、功耗低、易攜帶等優點而迅速普及,不僅能夠為智能手機、車輛、無人機等移動設備提供精確的導航、定位、授時服務,還可應用于大地監測、精密農業等傳統領域,具有廣闊的市場和發展前景[1]。同時,單頻低成本接收機的偽距觀測值會帶有很大的噪聲誤差,載波相位平滑偽距雖然可以減小測量噪聲對定位結果的影響,但在實際導航中,受衛星信號遮擋或者接收機高動態等影響,觀測值會出現粗差等異常情況,如果不對粗差探測處理直接解算,容易導致濾波發散或者影響解算的正確性[2]。目前,針對觀測數據質量中存在的問題,有學者采用改進的卡爾曼濾波算法提高定位精度[3-7]。本文在估計浮點解的附有單差模糊度的EKF模型的基礎上,添加IGGⅢ抗差模型,建立附有單差模糊度的改進抗差算法,并研究衛星高度角定權和信噪比定權隨機模型[8],利用熵權法,將兩者綜合添加到上述模型中,建立高度角與信噪比聯合定權的改進抗差EKF模型,對GNSS組合定位進行浮點解估計。
1 模型建立
1.1 EKF濾波模型
標準卡爾曼濾波算法一般假定系統方程與觀測方程均為線性[9]。針對動態GNSS載波相位差分算法,EKF算法可實現非線性系統的線性近似,進一步提高求解精度。假定非線性系統表示為:
(1)
式中,Xk和Xk-1分別為k時刻和k-1時刻的狀態向量;ωk-1和Wk為隨機噪聲;Φ為狀態轉移函數;Hk為狀態向量與觀測向量之間的傳遞函數;Γk-1為濾波狀態方程動態噪聲驅動矩陣,可預先設定[10]。離散化的擴展卡爾曼濾波一步預測為:
(2)
濾波估值及其對應的協方差陣為:
(3)
Pk=(I-Kk·Hk)·Pk/k-1
(4)
其中,預測協方差矩陣為:
Pk/k-1=Φ·Pk-1·ΦT+Qk-1
(5)
EKF增益矩陣為:
Kk=Pk/k-1·HT·(HPk/k-1HT+Rk)
(6)
GNSS載波相位差分定位實現高精度定位的重要先決條件是模糊度浮點解的正確估計,而模糊度浮點解的精度主要在于觀測量的精度,在削弱了系統誤差和偶然誤差后,EKF估計模糊度浮點解的精度較高,高成功率將模糊度的浮點解固定成為固定解,進一步提高動態定位精度。
1.2 基于高度角信噪比聯合定權的改進抗差EKF模型
附有單差模糊度估計浮點解的EKF模型,在進行浮點解估計過程中,容易受到各種觀測值殘差的影響而導致濾波的發散或者收斂時間過長,如何去除或者削弱觀測值中的粗差影響是保證EKF平穩濾波的關鍵。抗差卡爾曼濾波關鍵是在濾波過程根據抗差M估計等價權原理來調整觀測值隨機模型Rk值,從而提高單頻接收機抗差效果。
改進抗差EKF濾波遞推公式如下:
(7)
Vk=Zk-HkXk,k-1
(8)
Xk=Xk,k-1+KkVk
(9)
(10)
式中,Kk為增益矩陣;Pk,k-1為預測值的協方差陣;Hk為觀測方程系數陣;Rk為測量噪聲協方差陣;Vk為觀測向量殘差陣;Zk為觀測向量;Xk為濾波估值;Xk,k-1為狀態向量及其協方差陣;Pk為濾波更新值的協方差陣[11]。
抗差處理的原理是通過調節測量殘差陣Vk來改變噪聲協方差陣Rk的數值,達到良好的抗差效果。構造等價EKF增益矩陣,其形式類似IGGⅢ權函數表達式:
(11)
(12)
(13)

利用IGGⅢ抗差模型來改變Rk陣i顆衛星載波量測噪聲和偽距量測噪聲的數值來實現抗差的效果。
綜合衛星高度角與信噪比的熵權法改進的抗差EKF模型為:
(14)
綜合衛星高度角與信噪比的熵權法改進的抗差EKF模型在實際計算中,可以有效的削弱偽距或者載波觀測值中的粗差,更準確地估計單差模糊度的浮點解,避免濾波出現發散的現象,提高整周模糊度的固定成功率。
2 載波相位差分定位程序設計
本文利用Python3.8語言編寫了包括GPS單頻定位模型、BDS單頻定位模型在內的GNSS載波相位差分定位程序,程序數據處理基本流程如圖1所示。

圖1 GNSS載波相位差分定位程序數據處理流程圖
程序實現了基于EKF的GNSS載波相位差分算法,計算帶有粗差觀測值的三條基線的外符合精度,驗證高度角與信噪比聯合定權的改進抗差EKF算法的抗差性能,來探究是否滿足現有GNSS載波相位差分定位的精度要求。
3 數據分析
3.1 數據選取
為進一步驗證改進的抗差EKF在程序中的抗差效果,本文選取了河北省唐山市曹妃甸生態城控制網GPS1-GPS7和C401-C410基線,以及華北理工大學靜態控制網中WS-WN基線,三條不同長度的基線進行GNSS載波相位差分定位程序解算,點位觀測如圖2~圖4所示。

圖3 C401點位

圖4 WN01點位
三條基線基本信息如表1所示,截取觀測時間相同的歷元數,采樣間隔為1 s,高度角為5°。

表1 基線信息
3.2 實驗分析
為了驗證改進的抗差EKF算法在程序中的抗差效果,利用這三條不同長度基線的正確固定率的點位坐標,人為添加5個歷元的不同衛星上的觀測值粗差,選擇GPS單頻、BDS單頻定位模型進行解算,并分析其抗差效果,人為添加觀測值粗差的具體信息如表2所示。

表2 人為添加三個點位兩種模型的觀測值粗差
由圖5~圖7可知,通過GPS單頻定位模型,解算GPS1點位觀測數據中人為添加觀測值粗差的5個歷元的坐標分量殘差,由于觀測值粗差影響,標準EKF的GPS單頻定位模型在dN、dE和dU方向的最大偏差分別約為1.8 m、0.9 m和1.6 m,而改進抗差EKF的GPS單頻定位在dN、dE和dU方向的偏差約為0,可以將標準EKF模型解算的有偏定位坐標進行抗差處理,具有明顯的改善效果。

圖5 GPS單頻定位dN對比

圖6 GPS單頻定位dE對比
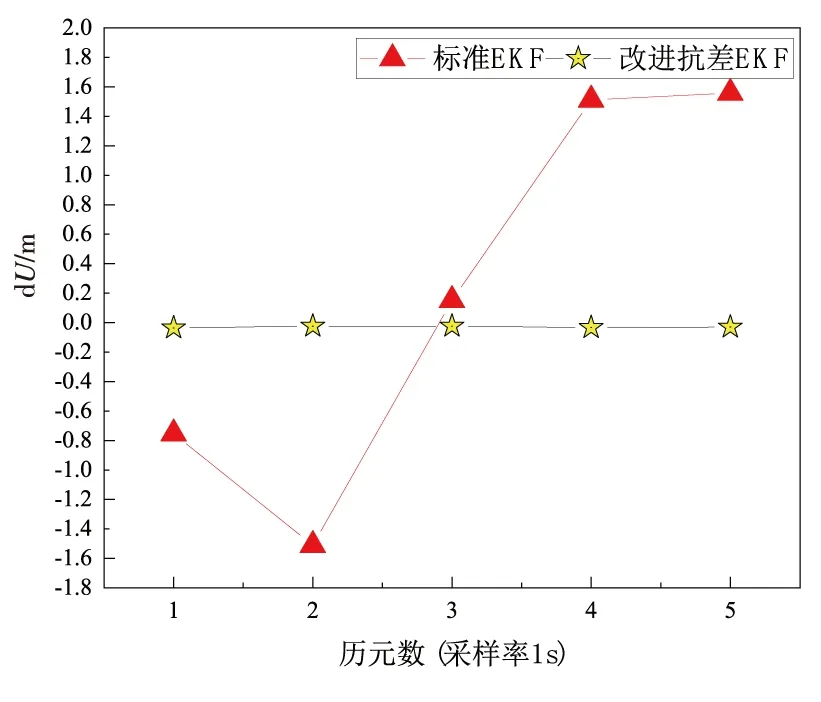
圖7 GPS單頻定位dU對比
由圖8~圖10可知,改進抗差EKF的BDS單頻定位模型與GPS單頻定位模型折線波形相同,將粗差對坐標的影響明顯改善,與參考坐標偏差近似為0,而解算帶有粗差的數據時,標準EKF的BDS定位模型與參考坐標的三維坐標相比,dN、dE和dU方向最大偏差約為0.8 m、1.1 m和1.2 m,嚴重偏離參考坐標值,成為浮點解坐標,定位精度受到較大影響。

圖8 BDS單頻定位dN對比

圖9 BDS單頻定位dE對比
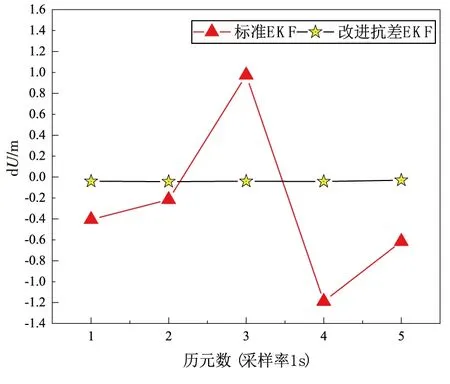
圖10 BDS單頻定位dU對比
由圖11~圖13可知,標準EKF的GPS單頻定位模型在C401點位dN、dE和dU方向最大偏差約為1.3 m、0.8 m和1.7 m,加入改進抗差EKF算法后,dN、dE和dU方向折線近似為偏差趨于0的平穩直線,表明改進抗差EKF算法具有很強的抗差能力。

圖11 GPS單頻定位dN對比

圖12 GPS單頻定位dE對比

圖13 GPS單頻定位dU對比
由圖14~圖16可知,標準EKF的BDS單頻定位模型,在dN、dE和dU方向最大偏差約為1.2 m、0.9 m和1.5 m,三維坐標的偏差呈現無規律性,觀測值粗差影響較大,改進抗差EKF模型有效改善了這一現象,展現了對粗差的抵抗能力,極大地提高了定位精度。
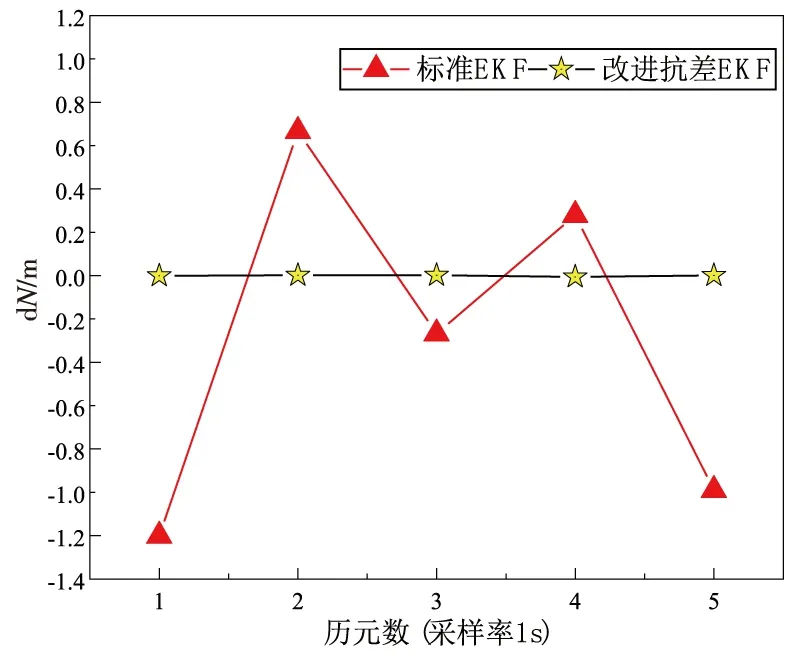
圖14 BDS單頻定位dN對比

圖15 BDS單頻定位dE對比

圖16 BDS單頻定位dU對比
由圖17~圖19可知,標準EKF的GPS單頻定位模型解算WS點位坐標時,三個方向的最大偏差約為0.8 m、0.8 m和1.6 m,嚴重偏離參考坐標,利用改進抗差的EKF的GPS單頻定位模型解算時,三個方向最小偏差約為0 m,有效改善粗差對坐標的影響,但是其效果并不穩定,dN、dE有約0.4 m的偏差,dU方向有近0.2 m的偏差。

圖17 GPS單頻定位dN對比

圖18 GPS單頻定位dE對比

圖19 GPS單頻定位dU對比
由圖20~圖22可知,BDS單頻定位模型抗差效果更加顯著,改進抗差EKF的BDS單頻定位模型定位結果穩定,表現出較強的抗差效果,可以很好的消除觀測值中的粗差帶來的坐標偏離的影響。

圖20 BDS單頻定位dN對比

圖21 BDS單頻定位dE對比

圖22 BDS單頻定位dU對比
為了更直觀的分析粗差對三個點位定位精度的影響,以及改進抗差EKF算法的提升,計算帶有粗差的GPS單頻、BDS單頻定位坐標的外符合精度,如表3所示。

表3 含粗差三個點位三種定位模型的坐標外符合精度
由表3可知,標準EKF的GPS單頻定位模型三點位綜合外符合精度分別為163.65 mm、160.01 mm和113.86 mm,相比BDS單頻定位模型要高,主要原因在于GPS系統的觀測衛星數量較少,粗差對其定位精度影響較大,加入改進抗差EKF算法后,GPS單頻定位模型的定位精度明顯提升,三個點位的改善率分別為80.46%、88.29%和73.31%,提高了定位精度,具有良好的抗差性。
BDS單頻定位模型與GPS單頻定位模型相比,外符合精度有所減小,但同樣受到觀測值粗差影響,標準EKF的BDS單頻定位模型三點位綜合外符合精度分別為115.28 mm、133.42 mm和78.80 mm,小于GPS單頻定位模型的外符合精度,因BDS系統觀測衛星數量高于GPS系統,衛星空間結構也更合理,故定位精度受到粗差影響比GPS系統要小,但坐標定位精度超限,經改進抗差EKF模型解算后,三點位的綜合外符合精度分別為40.45 mm、15.72 mm和10.48 mm,改善率分別為64.91%、88.22%和86.70%,證明了改進抗差EKF良好的抗差性與可靠性。
4 結 論
利用標準EKF算法模型和改進抗差EKF算法模型,通過程序解算不同點位的三維坐標殘差,分析兩種模型坐標外符合精度及改善率可以得出,單系統單頻的改進抗差EKF算法的定位模型抗差效果明顯,坐標三維方向的改善率均超過了64.91%,有效抑制粗差對觀測值的影響,展現了良好的抗差性,提高了定位精度,可以為單頻低成本GNSS接收機提供一種切實有效的抗差方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19