非相關(guān)源與相干源并存的信源數(shù)估計(jì)
2021-11-17 04:32:00余小玲龔曉峰雒瑞森
計(jì)算機(jī)仿真 2021年2期
余小玲,龔曉峰,雒瑞森
(四川大學(xué)電氣工程學(xué)院,四川 成都 610065)
1 引言
空間譜陣列信號(hào)處理在雷達(dá)、通訊、導(dǎo)航和電子對(duì)抗領(lǐng)域有著廣泛的應(yīng)用前景。基于特征子空間的高分辨譜估計(jì)技術(shù)中大部分算法要求信源個(gè)數(shù)精確已知。當(dāng)估計(jì)的信號(hào)源數(shù)目與真實(shí)的信號(hào)源數(shù)目不一致時(shí),空間譜曲線中的峰值個(gè)數(shù)與實(shí)際源數(shù)不相同,會(huì)對(duì)真實(shí)信號(hào)的估計(jì)產(chǎn)生嚴(yán)重的影響。然而,在實(shí)際應(yīng)用場(chǎng)合,信號(hào)源數(shù)往往是一個(gè)未知數(shù)。所以,信源數(shù)的準(zhǔn)確估計(jì)是子空間類譜估計(jì)算法需要解決的關(guān)鍵問(wèn)題。
針對(duì)信源數(shù)估計(jì)問(wèn)題,相關(guān)學(xué)者提出了很多較為有效的方法,包括Akaike 信息論(AIC)準(zhǔn)則[1]、最小描述長(zhǎng)度(MDL)準(zhǔn)則[2]、有效檢測(cè)(EDC)準(zhǔn)則、蓋氏圓法(GDE)[3]以及正則相關(guān)技術(shù)(CCT)[4]。這些算法能準(zhǔn)確估計(jì)信號(hào)源不相關(guān)或者獨(dú)立時(shí)的個(gè)數(shù),但是在多徑傳播和復(fù)雜電磁干擾背景下,會(huì)產(chǎn)生大量的強(qiáng)相關(guān)或相干信號(hào),信號(hào)子空間會(huì)向噪聲子空間擴(kuò)散,造成秩虧,導(dǎo)致算法失效[5]。因此相干信源估計(jì)問(wèn)題,首先應(yīng)是對(duì)信號(hào)解相干。圍繞信號(hào)的解相干問(wèn)題,很多有效算法被提出,大致分為兩類:一類是空間平滑類;另一類是矩陣重構(gòu)類。空間平滑類算法的原理是將空間平滑算法與信息論的方法相結(jié)合來(lái)實(shí)現(xiàn)相干信源數(shù)目的估計(jì)。主要包括前向空間平滑算法[6]、前后向空間平滑算法[7]以及空間差分平滑算法[8]。該算法是是通過(guò)犧牲有效陣元數(shù)目、實(shí)現(xiàn)解相干,會(huì)造成陣列孔徑的損失。矩陣重構(gòu)法的原理是直接利用陣列接收快拍數(shù)據(jù)或利用數(shù)據(jù)協(xié)方差矩陣進(jìn)行矩陣重構(gòu)方式解相干。主要包括矩陣分解法[9]和Toeplitz法[10-12]。該算法在低信噪比時(shí)性能良好,得到廣泛應(yīng)用。
本文針對(duì)非相關(guān)源與相干源共存時(shí)的信源數(shù)目估計(jì)問(wèn)題,利用陣元接收信號(hào)間的互相關(guān)信息,構(gòu)造一個(gè)秩只與相干源信息有關(guān)的差分矩陣,從而將非相關(guān)源與相干信源的估計(jì)分辨開(kāi)。該算法首先利用SORTE法估計(jì)相互獨(dú)立信源個(gè)數(shù),結(jié)合非相關(guān)信源導(dǎo)向矢量、相干信源陣列導(dǎo)向矢量矩陣分布與噪聲子空間正交特性的差異,根據(jù)DOA估計(jì)結(jié)果得到非相關(guān)信源數(shù)估計(jì)。然后通過(guò)利用陣元接收信號(hào)間的相互關(guān)系,構(gòu)造差分矩陣,最后利用SORTE法實(shí)現(xiàn)相干信源數(shù)估計(jì)。
相比常規(guī)信源數(shù)估計(jì)算法,本算法將非相關(guān)信源與相干信源分開(kāi)分辨,重復(fù)利用陣列接收數(shù)據(jù),具有更強(qiáng)的信源承載能力及陣元節(jié)省能力,且精確度較高。
2 信號(hào)接收模型
信號(hào)接收陣列模型如圖1所示。
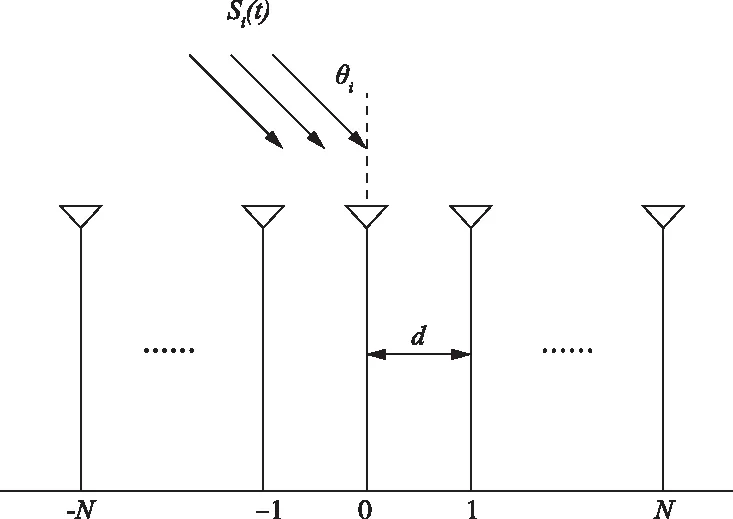
圖1 信號(hào)接收陣列模型
假設(shè)有M個(gè)窄帶遠(yuǎn)場(chǎng)信號(hào)源Si(t)以角度θi(i=1,2,…,M)入射到空間陣列上,其中陣列天線由2N+1個(gè)線性分布陣元組成,假設(shè)陣列中各陣元是各向同性的且不存在通道不一致、互耦等因素的影響,如圖1所示。假設(shè)噪聲為零均值、方差為δ2的高斯白噪聲,陣元間噪聲彼此獨(dú)立,且與信號(hào)不相關(guān)。以中間陣元為參考陣元,則其陣列接收信號(hào)寫(xiě)成矢量表達(dá)式為
X(t)=A(θ)S(t)+V(t)
(1)
式中,X(t)為陣列接收的快拍數(shù)據(jù)的矢量表達(dá)式;A(θ)為對(duì)應(yīng)的(2N+1)×M階陣列流形矩陣;V(t)為噪聲矢量,R為信號(hào)協(xié)方差矩陣。
X(t)=[x-N(t),…,x-1(t),x0(t),x1(t),…,xN(t)]T
(2)
A(θ)=[a(θ1),a(θ2),…,a(θM)]
(3)

(4)
S(t)=[s1(t),s2(t),…,sM(t)]T
(5)
V(t)=[v-N(t),…,v-1(t),v0(t),v1(t),…,vN(t)]T
(6)
R=E[X(t)XH(t)]
(7)
3 算法原理
3.1 非相關(guān)信源數(shù)估計(jì)

(8)
SORTE信源估計(jì)法主要思想是利用特征值二階統(tǒng)計(jì)方差信息構(gòu)造信源估計(jì)判決函數(shù)[13]。
若定義M1=Mu+D、?λi=λi-λi+1,其中i=1,…,2N,則有
?λM1+1=?λM1+2=…=?λ2N=0
(9)
定義特征值的方差為δk。

(10)
其中,k=1,…,2N。
定義SORTE函數(shù)為
(11)
由式(11)得,SORTE函數(shù)滿足如下關(guān)系:
(12)
則獨(dú)立信號(hào)(非相關(guān)信號(hào)與相干信號(hào)組之和)源估計(jì)的判決函數(shù)為
1
(13)
結(jié)合,非相關(guān)信源導(dǎo)向矢量、相干信源陣列導(dǎo)向矢量矩陣分布與噪聲子空間正交特性的差異,根據(jù)DOA估計(jì)結(jié)果得到非相關(guān)信源數(shù)估計(jì)。
3.2 相干信源數(shù)估計(jì)
假設(shè)M個(gè)信號(hào)中前L個(gè)相干,其余各信號(hào)間不相關(guān),則第n個(gè)陣元上的接收信號(hào)為

(14)
式中,n=-N,…,-1,0,1,…,N;βi=ρiejΔφi,ρi>0,i=1,2,…,L;Φ=-2πd/λ。定義第n個(gè)和第k(k≥0)個(gè)陣元上接收信號(hào)的互相關(guān)為

(15)
同理,對(duì)應(yīng)的第-k(-k≤0) 個(gè)與第-n個(gè)陣元上的接收信號(hào)的互相關(guān)為

(16)
用第k個(gè)陣元與所有陣元的接收信號(hào)的互相關(guān)構(gòu)造如下(N+1)×(N+1)維Toeplitz矩陣
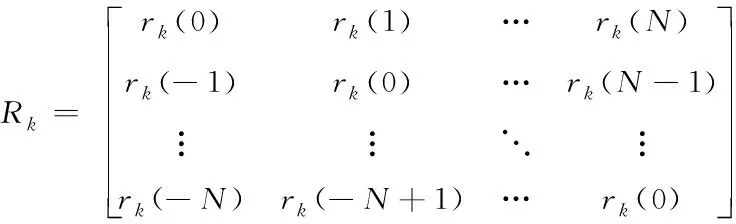
(17)
同理用對(duì)應(yīng)第-k個(gè)陣元與所有陣元的接收信號(hào)的互相關(guān),構(gòu)造如下(N+1)×(N+1)維Toeplitz矩陣
(18)
構(gòu)造差分矩陣

(19)
為了提高協(xié)方差矩陣特征空間對(duì)噪聲擾動(dòng)的魯棒性,所有陣列的互相關(guān)性和自相關(guān)性都被采用,按如下處理所有的差分矩陣

(20)
文獻(xiàn)[14]已證明,通過(guò)構(gòu)造差分矩陣達(dá)到了相干信源去相干的目的。
對(duì)于入射信源中有多個(gè)相干信源組的混合情況,由單組相干信源同理可推導(dǎo)。
3.3 算法的基本步驟
綜上所述,本文算法基本步驟如下:
1)利用SORTE得到非相關(guān)信源數(shù)和相關(guān)信源組數(shù)。
2)結(jié)合常規(guī)分辨方法中非相關(guān)信源陣列導(dǎo)向矢量與噪聲子空間正交關(guān)系特性,得到非相關(guān)信源數(shù)目的估計(jì)。
3)構(gòu)造差分矩陣。
4)對(duì)差分矩陣分解得到的特征值,利用SORTE算法估計(jì)得到相干信源數(shù)。
4 數(shù)值仿真與分析
為驗(yàn)證本文算法的性能,將本文算法與基于FSS、FBSS、SDS和Toeplitz矩陣重構(gòu)的解相干算法進(jìn)行比較。同時(shí),為了驗(yàn)證算法的有效性,進(jìn)行了4組仿真。
實(shí)驗(yàn)一:?jiǎn)谓M相干源時(shí)驗(yàn)證算法解相干能力對(duì)信噪比和快拍數(shù)的敏感程度,考慮均勻線陣的陣元數(shù)為13,陣元間距為半波長(zhǎng)。其中2個(gè)非相關(guān)信號(hào)和一組4個(gè)相干窄帶信號(hào)同時(shí)入射到陣列上,非相關(guān)信號(hào)DOA分別為[20°,30°],一組相干信號(hào)DOA分別為[-20°,10°,-50°,0°]。假設(shè)噪聲為零均值、方差為δ2的高斯白噪聲,陣元間噪聲彼此獨(dú)立,且與信號(hào)不相關(guān)。Monte Carlo實(shí)驗(yàn)次數(shù)為100。圖2是采樣快拍數(shù)為200時(shí)成功檢測(cè)概率與SNR關(guān)系曲線,圖3是SNR為15dB時(shí)成功檢測(cè)概率與快拍數(shù)的關(guān)系曲線。
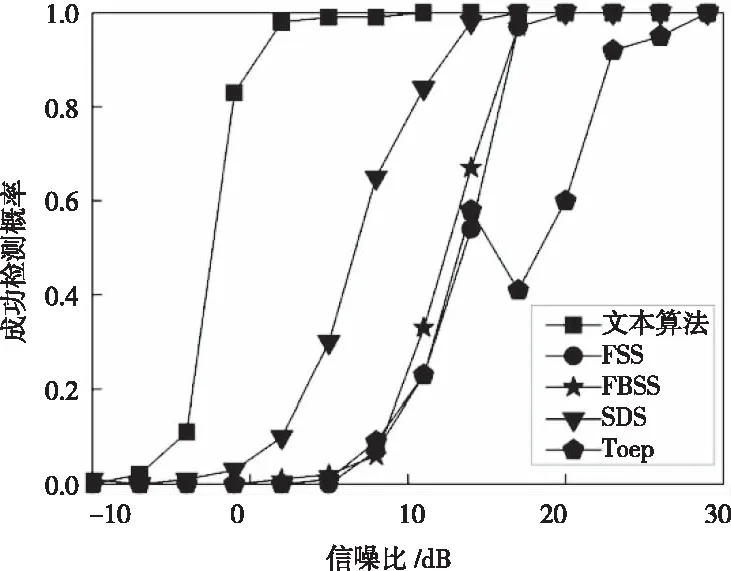
圖2 單組相干源時(shí)算法對(duì)信噪比的敏感程度

圖3 單組相干源時(shí)算法對(duì)快拍數(shù)的敏感程度
如圖2所示,本文算法在低信噪比下性能明顯高于另外4種算法,并且在信噪比為-10dB~30dB,步進(jìn)為3dB下,信噪比為2dB時(shí),成功檢測(cè)概率達(dá)到98%以上,由此可見(jiàn)本文算法對(duì)信噪比的敏感度較低。
如圖3所示,即使在快拍數(shù)很小的情況下,本文算法依舊可以保證99%以上的正確率,即快拍數(shù)對(duì)最后的估計(jì)結(jié)果幾乎不會(huì)造成影響,取信噪比為15dB快拍數(shù)為20到200,步進(jìn)為20。SDS 算法在快拍數(shù)為200時(shí)正確率才能達(dá)到 96%,另外3種算法,即使在快拍數(shù)達(dá)到200的情況下正確率也沒(méi)有達(dá)到80%。
實(shí)驗(yàn)二:多組相干源時(shí)驗(yàn)證算法解相干能力對(duì)信噪比和快拍數(shù)的敏感程度。其中2個(gè)非相關(guān)信號(hào)和兩組4個(gè)相干信號(hào)同時(shí)入射到陣列上,非相關(guān)信號(hào)DOA分別為[20°,30°],第一組相干信號(hào)DOA分別為[-20°,10°]第二組相干信號(hào)DOA分別為[-40°,0°]。其它仿真參數(shù)同實(shí)驗(yàn)一。圖4是采樣快拍數(shù)為200時(shí)成功檢測(cè)概率與SNR關(guān)系曲線。圖5是SNR為15dB時(shí)檢測(cè)概率與快拍數(shù)的關(guān)系曲線。
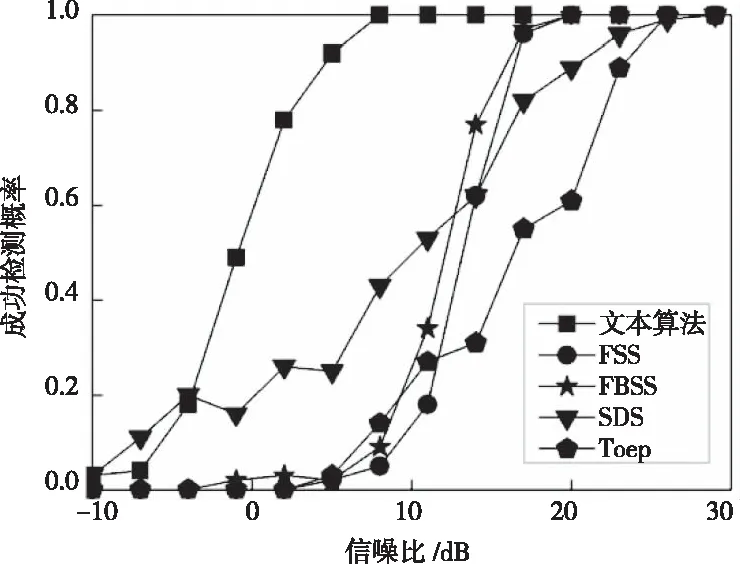
圖4 兩組相干源時(shí)算法對(duì)信噪比的敏感程度

圖5 兩組相干源時(shí)算法對(duì)快拍數(shù)的敏感程度
如圖4所示當(dāng)信噪比大于26dB時(shí)5種算法的正確率均可以達(dá)到100%,但是在信噪比的敏感程度上,本文算法最優(yōu),在5dB時(shí)的正確率就可以達(dá)到100 %。
如圖5所示,在快拍數(shù)為40的情況下本文的正確率就可以達(dá)到100%,其它4種算法,即使在快拍數(shù)達(dá)到200時(shí),正確率也均低于90%。
實(shí)驗(yàn)三:?jiǎn)谓M相干源角度接近時(shí)驗(yàn)證算法解相干能力對(duì)信噪比和快拍數(shù)的敏感程度。其中2個(gè)非相關(guān)信號(hào)和一組4個(gè)相干信號(hào)同時(shí)入射到陣列上,非相關(guān)信號(hào)DOA分別為[7°,-21°],相干信號(hào)DOA分別為[-20°,5°,-30°,0°],其它仿真參數(shù)同實(shí)驗(yàn)一。圖6是采樣快拍數(shù)為200時(shí)成功檢測(cè)概率與SNR關(guān)系曲線。圖7是SNR為15dB時(shí)成功檢測(cè)概率與快拍數(shù)的關(guān)系曲線。

圖6 相干源角度接近時(shí)算法對(duì)信噪比的敏感程度
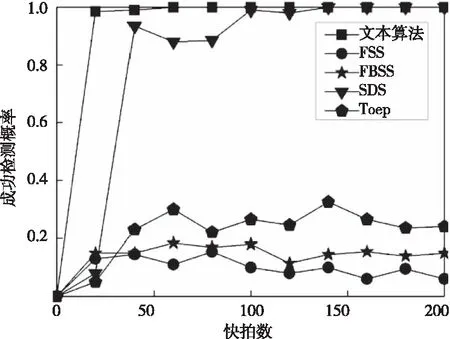
圖7 相干源角度接近時(shí)算法對(duì)快拍數(shù)的敏感程度
如圖6、圖7所示,當(dāng)非相關(guān)信源與相干信源角度接近時(shí)傳統(tǒng)的FSS、FBSS和Teop算法通過(guò)空間平滑或矩陣重構(gòu)之后仍可能是秩虧的狀態(tài),因此正確率較低,但是本文算法和SDS是通過(guò)差分構(gòu)造差分矩陣將非相關(guān)源和相干源區(qū)分開(kāi),因此分辨率不受角度間隔的影響。
實(shí)驗(yàn)四:信源數(shù)等于陣元數(shù)時(shí)驗(yàn)證算法解相干能力對(duì)信噪比和快拍數(shù)的敏感程度。其中9個(gè)非相關(guān)信號(hào)和一組4個(gè)相干信號(hào)同時(shí)入射到陣列上,非相關(guān)信號(hào)DOA分別為[20°,30°,-10°, -45°,40°,-60°,60°,15°,-25°],一組相干信號(hào)DOA分別為[-20°,10°,-50°,0°]。其它仿真參數(shù)同實(shí)驗(yàn)一。圖8是采樣快拍數(shù)為200時(shí)成功檢測(cè)概率與SNR關(guān)系曲線。圖9是SNR為15dB時(shí)成功檢測(cè)概率與快拍數(shù)的關(guān)系曲線。
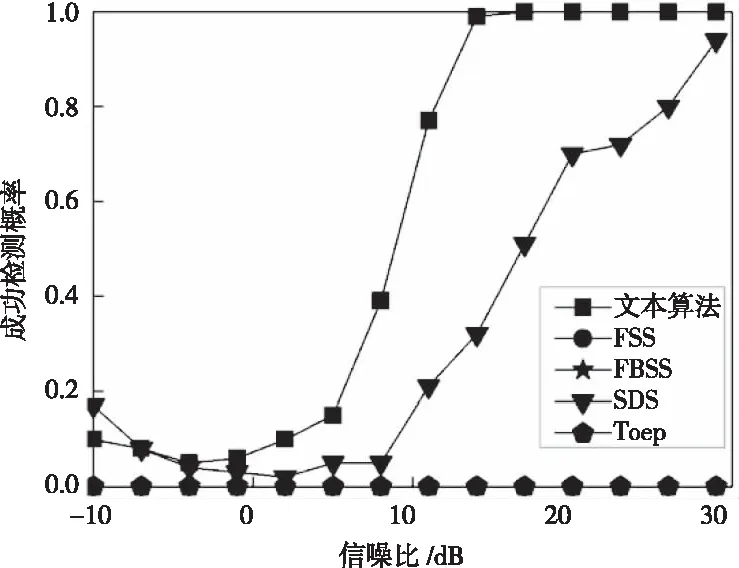
圖8 信源數(shù)等于陣元數(shù)時(shí)算法對(duì)信噪比的敏感程度

圖9 信源數(shù)等于陣元數(shù)時(shí)算法對(duì)快拍數(shù)的敏感程度
如圖8、圖9所示,當(dāng)入射信源數(shù)等于陣列元數(shù)時(shí),F(xiàn)SS、FBSS、Toep算法均失效,只有本文算法和SDS能夠檢測(cè)13個(gè)信號(hào),顯然本文算法的精確度較SDS高,且在信噪比為11dB時(shí),正確率達(dá)到99%,對(duì)快拍數(shù)的敏感程度顯然也優(yōu)于SDS。在信源數(shù)等于陣元數(shù)時(shí)仍有較好的估計(jì)結(jié)果,可見(jiàn)本文的算法的信源承載能力較強(qiáng)。
5 結(jié)束語(yǔ)
針對(duì)相干源與非相關(guān)源并存時(shí)的信源數(shù)目估計(jì)問(wèn)題,提出了一種基于差分算法的信源數(shù)估計(jì)方法。利用陣元間的互相關(guān)信息構(gòu)造差分矩陣,使其秩只與相干源的信息有關(guān),達(dá)到相干源解相干。該算法首先利用SORTE法估計(jì)獨(dú)立信源的個(gè)數(shù),結(jié)合常規(guī)分辨方法中非相關(guān)信源陣列導(dǎo)向矢量與噪聲子空間正交關(guān)系特性,實(shí)現(xiàn)非相關(guān)信源數(shù)目的估計(jì),再構(gòu)造僅包含相干源信息的差分矩陣,實(shí)現(xiàn)相干源數(shù)目的估計(jì)。該算法通過(guò)構(gòu)造差分矩陣,消除了噪聲的影響,將相干源與非相關(guān)源的估計(jì)分隔開(kāi)。
實(shí)驗(yàn)結(jié)果表明:1)相比傳統(tǒng)的空間平滑類算法、矩陣重構(gòu)類算法以及SDS算法,本文算法在快拍數(shù)小和信噪比低的情況下依然能夠準(zhǔn)確的估計(jì)信源數(shù)目。單組相干源時(shí),當(dāng)快拍數(shù)為200的情況下,信噪比為2dB時(shí),成功檢測(cè)概率達(dá)到98%以上。當(dāng)信噪比為15dB的情況下,快拍數(shù)為20時(shí)成功檢測(cè)概率達(dá)到99%以上;2)當(dāng)信源角度接近時(shí)算法依舊有很好的性能。在快拍數(shù)為200的情況下,常規(guī)信源數(shù)估計(jì)算法在信源角度接近時(shí),信噪比達(dá)到30dB時(shí),成功檢測(cè)率也只能達(dá)到60%,本文算法,當(dāng)信噪比為5dB時(shí),成功檢測(cè)率能達(dá)到98%以上;3)將非相關(guān)信源與相干信源分開(kāi)檢測(cè),算法的信源承載能力較強(qiáng)。常規(guī)信源數(shù)估計(jì)算法都會(huì)損失陣列孔徑,本文算法將非相關(guān)信源與相干信源分開(kāi)分辨,重復(fù)利用陣列接收數(shù)據(jù),具有更強(qiáng)的信源承載能力及陣元節(jié)省能力,當(dāng)陣元數(shù)為13時(shí),可估計(jì)的信源數(shù)與陣元數(shù)相同。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
