基于選擇性交互的群集機器人協(xié)同避險方法
2021-11-17 07:09:54張瑾琪閆茂德楊盼盼張博宇
計算機仿真 2021年2期
張瑾琪,閆茂德,楊盼盼,張博宇
(長安大學電子與控制工程學院,陜西 西安 710064)
1 引言
群集機器人以其感知分布性廣、系統(tǒng)可靠性高、功能分布性強、經(jīng)濟實用性好等特點,受到了研究人員的廣泛關(guān)注,已成為當前機器人領域的研究熱點[1]。隨著群集機器人應用場合的不斷擴大,日趨復雜的作業(yè)環(huán)境使機器人群集時刻面臨障礙物、外部威脅等危險場景[2],嚴重影響了其任務完成效率與群體安全。因此,如何在外部威脅下實現(xiàn)群集機器人的高效協(xié)同避險,是其向?qū)嵱没~進過程中急需解決的問題。
近年來,關(guān)于群集機器人協(xié)同避險的研究,已有一定成果出現(xiàn)。文獻[3]根據(jù)多路傳感器采集到障礙物距離信息,提出了一種基于多傳感器融合與模糊控制的避障算法,實現(xiàn)了群集機器人在未知環(huán)境中的準確避障。文獻[4]將增強學習方法引入群集協(xié)同控制中,設計了基于Q-learning的移動機器人局部避障路徑規(guī)劃機制,實現(xiàn)了復雜環(huán)境中機器人群集對外部威脅的自主應對。文獻[5]采用區(qū)間二型模糊神經(jīng)網(wǎng)絡來提升機器人避險運動的平滑性,有效抑制了避險過程中的大幅度震蕩。文獻[6]討論了僅利用距離傳感器實現(xiàn)蛇形機器人在未知環(huán)境中的自主避險問題。文獻[7]借鑒生物群集避險行為對無人機群的自主避險控制進行了研究。然而,上述研究多遵循以“信息一致性”為基礎的平均式交互規(guī)則,容易導致原本就稀疏的外部有效刺激信息在群內(nèi)被淹沒與“中和”,阻礙了外部有效刺激信息在群內(nèi)的傳播,存在避險效率不高、環(huán)境適應性差等缺陷[8],成為群集機器人技術(shù)發(fā)展的瓶頸。
反觀自然界生物群集(如椋鳥群、沙丁魚群等),其在集體運動中個體僅通過與周圍有限個鄰居的運動交互即可實現(xiàn)對威脅的靈活規(guī)避[9]。研究表明[10,11],生物通過有選擇地與特定的鄰居進行信息交互,可實現(xiàn)威脅信息在群內(nèi)的定向傳播,從而顯著提高群集運動的靈活性和避險效率。受此啟發(fā),本文提出一種基于選擇性交互的群集機器人協(xié)同避險方法。該方法通過引入選擇性交互行為實現(xiàn)外部威脅信息在群集內(nèi)高效定向傳播,從而使機器人個體在外部感知信息有限的情況下,僅通過機器人之間的局部交互,就能穩(wěn)定高效地完成避險的行為。仿真結(jié)果驗證了該方法的可行性和有效性。
2 問題描述
考慮由N個結(jié)構(gòu)簡單、功能單一、成本低廉的同構(gòu)機器人組成的群集機器人系統(tǒng)。假設機器人個體具有有限的感知能力,僅能夠獲得感知范圍內(nèi)的鄰居的位置和速度等信息。在此,將群集機器人系統(tǒng)中的第i個機器人個體動力學模型描述為
(1)
其中,xi(t)表示第i個機器人的位置,vi(t)為其速度,ui(t)代表其加速度。在本文中,ui(t)作為機器人個體的控制輸入。
本文旨在構(gòu)建一種新的信息交互規(guī)則,可在機器人僅感知有限外部信息的前提下,通過鄰居間的運動交互,有效地促進外部有效威脅信息在群內(nèi)的定向傳播,避免“平均”作用對外部威脅信息的稀釋,使群集機器人協(xié)同避險行為穩(wěn)定高效地實施。
3 基于選擇性交互的群集機器人協(xié)同避險方法
3.1 機器人選擇性交互行為建模
在生物群集中,存在個體與其距離最近的鄰居之間的交互密切、對視場范圍內(nèi)視覺特征顯著的少數(shù)鄰居做出反應等行為偏好[12][13]。受此啟發(fā),結(jié)合上述生物“偏好性”的特點,提出一種機器人個體受感知范圍內(nèi)距離最近的鄰居和速度突變最明顯的鄰居影響最大的選擇性速度協(xié)同模型。

圖1 選擇性交互模型示意


(2)
3.2 基于選擇性交互的群集機器人運動協(xié)同策略
在群機器人協(xié)同避險過程中,為了保證編隊穩(wěn)定性以及在遇到外部威脅時避險的快速有序性,在此提出了一種將“平均”速度和選擇性交互速度相結(jié)合的速度協(xié)同策略:

(3)

3.3 基于選擇性交互的群集機器人協(xié)同避險算法
以(3)中的基于選擇性交互的群集機器人運動協(xié)同策略為基礎,提出一種基于選擇性交互的群集機器人協(xié)同避險控制算法:

(4)
其中,機器人i的控制輸入ui由四個部分組成:

(5)



(6)
其中,pgain和vgain分別為位置反饋系數(shù)和速度反饋系數(shù)。

(7)
其中,M={i:‖xk-xi‖≤d,i=1,2…N}表示能感知到外部威脅的機器人集合;d表示機器人對外部威脅的感知半徑;kesp表示避險勢場系數(shù)。
此外,引入g(g=0或1)表示機器人個體是否能夠直接感知到外部威脅信息。
可見,以上基于選擇性交互的速度協(xié)同機制具有明顯的“選擇性特征”,機器人個體并非對感知的范圍內(nèi)所有的鄰居做出協(xié)同反應,而是選擇其中距離最近和速度變化最大的兩個鄰居進行信息交互,通過增加此項速度負反饋調(diào)節(jié),可以使機器人個體對外界威脅信息的間接感知能力增強,從而兼顧協(xié)同編隊和協(xié)同避險兩方面的需求,既能實現(xiàn)避險過程的穩(wěn)定有序,同時提高了避險的效率。
4 仿真驗證
為驗證本文提出的基于選擇性交互的群集機器人協(xié)同避險算法的有效性,建立單捕食者-群集機器人追逃場景,對其展開仿真研究。
假設捕食者具有全局感知能力,其初始位置為[100,100],捕食者的運動行為亦遵循式(2),其控制輸入滿足
(8)
其中,cprey表示捕食勢場系數(shù),xprey為捕食者的位置。

4.1 仿真結(jié)果
為使群集機器人的協(xié)同避險過程更為直觀,在此用四副子圖表示群集機器人在典型時刻的運動狀態(tài)。其中,紫色圓點表示捕食者,藍色圓點代表機器人個體,綠色圓點表示感知到外界威脅信息的個體,黃色圓點表示感知到外界威脅信息并做出避險反應的個體,紅色圓點表示未感知到外界威脅卻做出反應的個體。實驗結(jié)果如圖2所示。

圖2 群集機器人避險過程
從圖2(a)和(b)可以看出,機器人群集在未感知到外部威脅時整齊編隊朝著目標靠進,當群集邊緣的少數(shù)機器人感知到外部威脅的瞬間,距離威脅最近的機器人率先做出避險反應;從圖2(c)可以看出,當群集邊緣的機器人感知到外部威脅并做出避險反應時,整個機器人群集之間通過選擇性交互實現(xiàn)信息的隱式傳遞并做出避險反應,展現(xiàn)出本方法良好的協(xié)同避險能力;從圖2(d)可以看出,首個機器人被捕食之后,剩余的機器人重新形成新的編隊繼續(xù)朝著目標前進。
從上述仿真結(jié)果可以看出,本文所設計的基于選擇性交互的群集機器人協(xié)同避險算法能夠有效的實現(xiàn)群集機器人協(xié)同編隊及協(xié)同避險,具備良好的穩(wěn)定性和有序性。
為更直觀的展示群集機器人在遇到外部威脅時機器人間信息傳遞狀態(tài),群集機器人信息傳遞網(wǎng)絡拓撲圖如圖3所示。
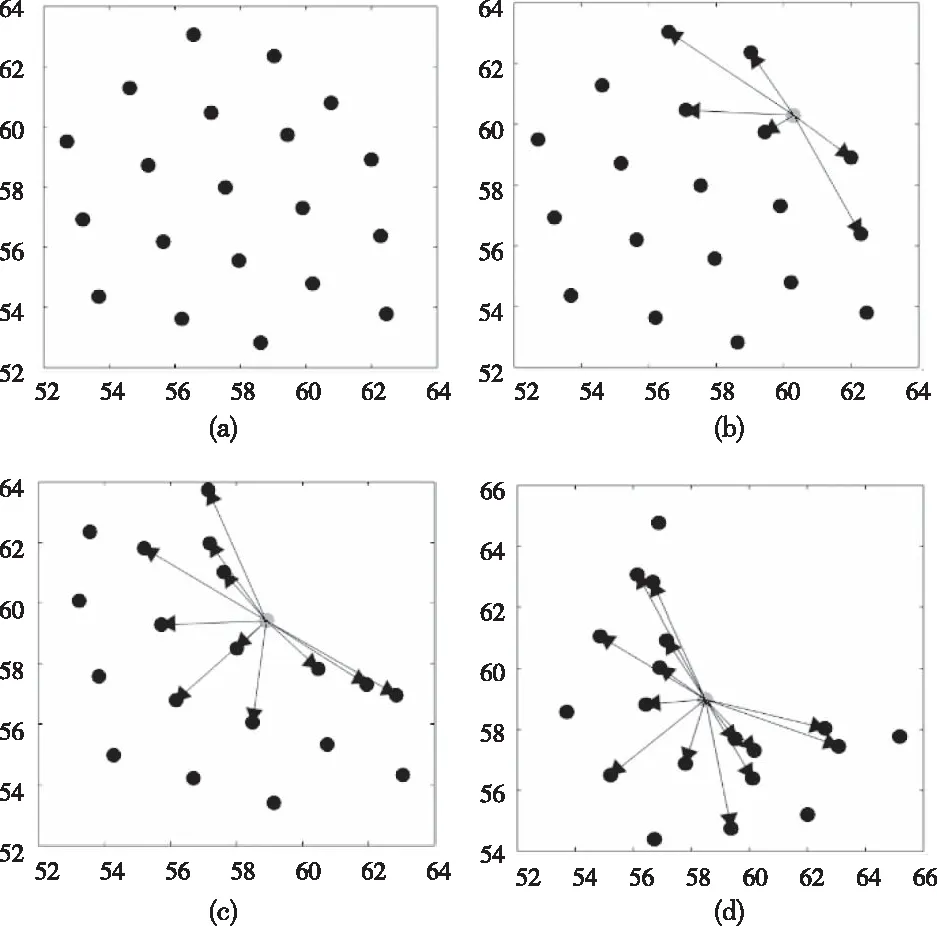
圖3 群集機器人信息傳遞拓撲演化
圖3中,綠色圓點表示感知到外界威脅信息并做出反應的機器人個體,紅色連線部分即為未感知到外部威脅信息的機器人個體通過個體間選擇性交互從而做出避險反應的信息傳遞網(wǎng)絡。圖3(a)到(d)展現(xiàn)了隱式信息傳遞的網(wǎng)絡拓撲變化過程,可以看出隨著信息的傳遞,未感知到外界威脅信息而做出反應的機器人個體逐漸增多,表明了選擇性交互速度協(xié)同策略提高了整個機器人群集對威脅信息的感知能力,從而提高了整個群集的避險效率。
4.2 對比分析
為進一步驗證本文所提出的基于選擇性交互的群集機器人協(xié)同避險群集方法的優(yōu)勢,以存活時間和首個個體死亡時間作為評價指標,將其與采用“平均”信息交互的群集機器人協(xié)同避險行為進行對比分析。
在此,將存活時間定義為所有個體被抓捕所需的時間,首個個體死亡時間定義為抓捕到第一個機器人個體所需的時間,均以s為單位。為了減少隨機因素的影響,每組參數(shù)獨立運行100次仿真后統(tǒng)計平均值再比較。仿真對比結(jié)果見表1和表2。
表1 選擇性交互群集避險與“平均”信息交互群集避險的群集存活時間對比
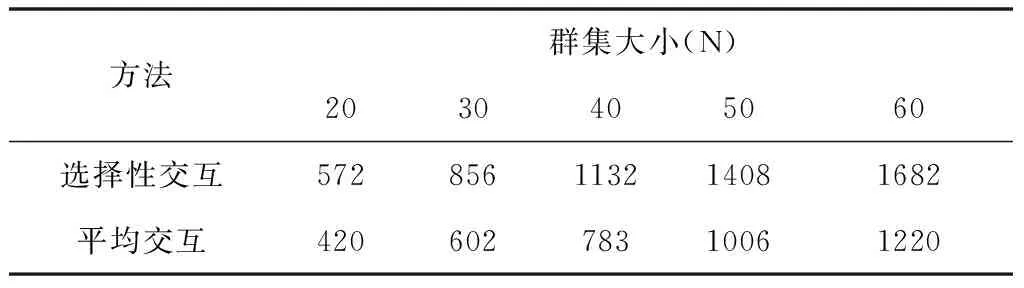
方法群集大小(N)2030405060選擇性交互572856113214081682平均交互42060278310061220
表2 選擇性交互群集和“平均”信息交互群集首個被捕食個體時間對比

方法群集大小(N)2030405060選擇性交互3744413837平均交互3332323233
從表1和表2可以看出:
1) 對于相同規(guī)模的群集,采用選擇性交互協(xié)同避險的機器人群集存活時間和首個被抓捕到的個體所用時長均比“平均”信息交互群集長,平均存活時間可延長39%,首個個體存活時間可延長21%,表明選擇性交互算法對避險效率的提高起到一定的作用;
2) 兩種方法下群集的存活時長和首個被抓捕到的個體所用時長隨個體數(shù)量的增加呈現(xiàn)遞增趨勢,隨著個體數(shù)量的增加,群集存活時間延長,且首個個體存活時間也變長,其中采用選擇性交互協(xié)同避險的群集隨著個體數(shù)量的增加群集存活時長增加幅度更大,表明選擇性交互算法的高效性。

5 結(jié)論
本文針對群集機器人的協(xié)同避險問題,提出了一種基于選擇性交互的群集機器人協(xié)同避險控制方法。該方法通過個體選擇性交互行為實現(xiàn)外部有效威脅信息在群內(nèi)的定向傳播,并結(jié)合“平均一致性”規(guī)則使得機器人群集在外部威脅刺激下能穩(wěn)定有序的避險。本文所提的方法兼顧了機器人群集避險的穩(wěn)定性和高效性,有效提高了群集的生存率和任務執(zhí)行效率。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
