MIMU輔助無人機相關干涉儀測向方法研究
2021-11-17 04:31:34王秋瀅匡春旭鐘萬青
計算機仿真 2021年2期
王秋瀅,匡春旭,鐘萬青
(哈爾濱工程大學信通學院,黑龍江 哈爾濱 150000)
1 引言
近年來,微型旋翼無人機測向技術被廣泛應用于偵察、航海航空救援、搶險救災等諸多領域,其優勢在于旋翼無人機的懸停飛行能力可為測向系統提供良好的工作環境,避免了飛行位姿變化給測向系統帶來的誤差。然而微型旋翼無人機測向技術目前仍面臨一些問題,無人機懸停狀態下會因自身電機轉動和氣流影響而產生振動,使得與機體固連的陣列天線受角度干擾而產生相位誤差,導致測向精度下降[1],直接影響無人機執行偵察和救援等任務的能力。
為保證機載測向系統在振動環境下的優良性能,關鍵在于對天線陣列的振動誤差測量和校正,對此學者已經做了許多研究。文獻[2,3]分析了振動對機載天線陣列的影響,確定振動對天線陣列的相位和幅度誤差的影響,推導出共形天線失真的計算模型和相位噪聲方程,并對其進行驗證。在振動陣列校正方面[4-6],北約小組(NAOT)是較為知名的研究團隊之一,他們采用機翼的一階振動模式模擬測向天線陣列的結構形變,結合測向原理分析無人機振動對測向系統的影響,并利用自適應和合成波束成形法對誤差進行補償,在存在振動的情況下改進了到達方向估計。北約研究任務組SET-131則設計了一種具有主動振動補償的天線陣列[7],用安裝在天線附近的加速度計和壓電陶瓷貼片的組合來感測變形,并誘導湮滅振動,可改善機載天線的抗振性能。除此之外,也有學者利用INS和萬向節對誤差進行測量和校正[8,9],用安裝在天線平臺背面的INS或載體自身INS測量其姿態信息,再通過萬向節實時調節天線指向,達到校正天線相位誤差的目的,但這種調節方式速度較慢,在高頻振動條件下,難以進行校正。
針對上述問題,本文提出一種微型慣性測量單元(Miniature Inertial Measurement Unit,MIMU)輔助微型旋翼無人機強魯棒性測向方法。首先,本文介紹了相關干涉儀測向原理,對微型旋翼無人機的振動形式進行建模,分析了無人機振動對測向系統的影響;其次,利用MIMU測量無人機的振動姿態角,在相關干涉儀測向原理的基礎上,通過測得的振動姿態角對測向系統進行補償;最后利用仿真驗證該方法的有效性。實驗結果表明該測向方法在微型旋翼無人機振動狀態下有較好的測向精度。
2 基于相關干涉儀的微型無人機測向基本原理與誤差分析
2.1 相關干涉儀測向原理及天線排布
目前測向體制種類眾多,其中相關干涉儀測向體制適合機載測向在工程上的實現,其優點主要表現在以下幾個方面:測向天線陣布陣方式靈活,可以根據飛行器的實際結構來確定天線安裝的位置;可采用長短基線結合的方法來實現測向,并能保證一定的測向精度;測向原理簡單,對信道的幅度及相位一致性要求較低。因此本文將在相關干涉測向系統的基礎上進行分析與改進,本節首先簡單介紹一維單基線相關干涉測向原理,單基線干涉儀測向原理圖如圖1所示。

圖1 單基線干涉儀測向原理圖
來波信號從方位角θ射入兩根天線,經接收機和鑒相器處理,得到兩陣元間相位差Δφ為

(1)
其中,波程差Δs=dsinθ,λ為來波信號的波長。

(2)
式(2)表示了來波方位角與相位差之間的數學關系。同理,在二維相關干涉系統中,來波方位角和仰角與相位差之間存在類似的對應關系,根據這種數學關系,以相等間隔分隔來波方位角和仰角,計算出每組方位角和仰角對應相位差的值,建立樣本標準庫。在測向時,天線間實測得到的相位差與樣本標準庫進行相關匹配運算,與實測相位差最接近的樣本值所對應的方位角和仰角即為來波方向。為了提高相關匹配運算的準確性,相關干涉儀測向法通常采用多基線獲取多個不同相位差,本文建立5天線均勻圓陣,天線排布圖如圖2所示。

圖2 天線陣元排布圖
五個天線陣元(O,A,…,D)均勻排布在半徑為r的圓環上,構成正五邊形,共組成五條基線(d1,d2,…,d5)。來波信號從某一方向入射到天線陣列,陣列實際可測得的基線相位差分別為1、2、3、4、5,將其記為矢量形式。將與樣本標準庫中的數據依次進行相關匹配運算,找到與測量值最接近的樣本值,該樣本值所對應的方位角和仰角即為來波方向。
相關匹配過程中,用來度量數據之間相近程度的函數稱為相關函數,記為J,形式如下
(3)
其中,φk表示樣本數據的第k個值,k表示的第k個值。
2.2 無人機懸停振動對測向精度的影響
微型旋翼無人機因其體型小巧,更易受到電機轉動影響產生振動,給其搭載的測向系統帶來誤差,因此本節首先對無人機懸停狀態的振動形式進行分析,微型旋翼無人機在懸停過程中的最主要振源是作為驅動源的電機,同時氣流和地面效應等因素也會對無人機產生干擾。H Schippers等學者對無人機上合成孔徑雷達的振動問題做了大量實驗研究,并通過實驗的方式給出了無人機的一階振動模型,本文將利用該數學模型模擬無人機的振動形式,進而分析振動對測向精度的影響。
本節中假設無人機的振動是非常理想化的單頻振動[10],由強制振動激勵引起的天線陣列單元位置誤差Z(t)如下
Z(t)=a(t)+Z0+m1(t)Z1
(4)
其中,a(t)=ω0cos(ωt)為強制振動,ω0為振動幅度,ω為振動角頻率;Z0代表彎曲模型

(5)
其中,L為機翼長度,h為機翼厚度,系數ρg/E=0.38×10-6;Z1代表第一振動模型
Z1=(cosh(z1)+cos(z1))(sin(z1)-sinhz(z1))
- (sinh(z1)+sin(z1))(cos(z1)-cosh(z1))
(6)
其中,z1是與材料有關的系數;m1(t)代表振動模態系數
m1(t)=Re(Q1eiωt)
(7)

(8)
得到無人機振動所產生的姿態角變化后,本文將姿態角信息與二維相關干涉儀測向系統結合,分析振動對微型旋翼無人機測向系統精度的影響。首先在圖2基礎上建立右手笛卡爾直角系,Z軸垂XOY面向下,如圖3所示為測向示意圖,設OA基線長度為1。

圖3 測向示意圖
則五基線的矢量表示形式
ΟΑ=[0,1,0]
OB=[sin 72°,1+cos 72°,0]
OC=[sin 36°+cos 18°,0.5,0]
OD=[cos 18°,-sin 18°,0]
CB=[-sin 36°,cos 36°,0]
設信號來波方向方位角為θ,仰角為β,則來波方向矢量形式為
OP=(cosβcosθ,cosβsinθ,sinβ)
(9)
設待解量為波程差Δsi,以基線d1為例進行解算,令Δs1表示基線d1的波程差
Δs1·OP(OA-Δs1·OP)=0
(10)
(Δs1)2·OP2=Δs1·OA·OP
(11)
其中OP2=1,則有
Δs1=OA·OP
(12)
推廣至五條基線,令Δs=(Δs1,Δs2,…,Δs5)則有
Δs=M·OP
(13)

Δs=MC·OP
(14)


解算得到波程差后,通過相位差與波程差的數學關系可計算出各基線間的相位差。根據第2節所介紹的相關匹配算法,將得到的相位差與標準庫進行相關匹配運算,最終得出輻射源的方位信息。由式(14)可以看出,鑒相器輸出的相位差包含了因無人機振動帶來的姿態誤差矩陣,根據無人機一階振動模型,振動姿態變化幅值較小,因此對測向誤差近似為線性關系,且測向誤差隨時間的變化趨勢基本與無人機振動姿態變化一致。
3 基于MIMU的振動姿態實時測量及補償
微型旋翼無人機的懸停振動導致測向結果出現誤差,解決這一問題首先要對振動姿態進行實時測量。近年來,MIMU精度和穩定性逐步提高,被廣泛應用于無人機導航定位領域,其核心組件是加速度計和陀螺儀,分別用來獲取加速度和角速度信息,加速度和角速度信息經連續的積分運算,最終輸出載體的位置、速度、姿態等導航信息。下面將說明MIMU測量無人機振動姿態的原理。
圖4為MIMU的測姿算法流程圖。常用的捷聯矩陣更新算法歐拉角法、方向余弦法和四元數法,其中歐拉角和方向余弦法都存在計算量大難以實現的弊端,而四元數法師利用四元數對坐標系間的旋轉進行描述,具有原理簡單計算量小的優點,因此,本文采用四元數法對捷聯矩陣進行更新。
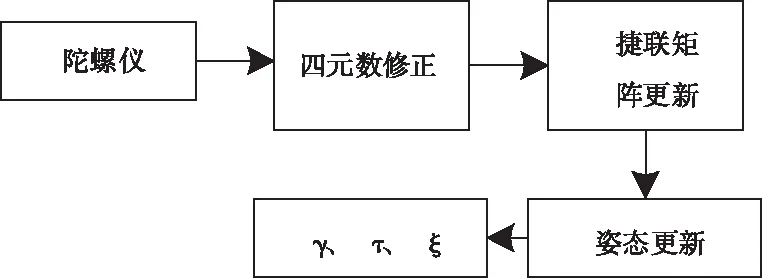
圖4 MIMU測姿算法流程圖
四元數的定姿公式如下
Q=q0+q1ib+q2jb+q3kb
(15)
四元數的實時更新可通過求解四元數微分方程而得到,四元數微分方程為

(16)


(17)
求解四元素微分方程得到q0、q1、q2、q3,根據下式可得系統的捷聯矩陣

(18)
傳統慣性導航系統中的捷聯矩陣表示載體坐標系b相對導航坐標系n的轉換關系,微型旋翼無人機振動產生是測向開始t0時刻的載體坐標系b0相對tk時刻的載體坐標系bk之間的姿態變化,因此可得到以下關系

(19)

(20)

(21)
由上式可知,相位差中包含振動姿態誤差,隨后與樣本標準庫進行相關匹配運算,得出不準確的方位值[,],由此輻射源輻入射方向的矢量形式可表示為
OP=[coscos,cossin,sin]
(22)

(23)
則通過式(23)進行簡單解算得到校正后的方位角和仰角信息

(24)
β=arcsin(v3)
(25)
4 仿真與分析
為驗證本文方法的有效性,將進行三項仿真:①微型旋翼無人機振動仿真;②振動條件下相關干涉儀測向仿真;③MIMU輔助無人機測向仿真。
實驗1:根據第2.2節中給出的微型旋翼無人機振動的數學模型對其進行仿真。仿真條件見表1,無人機振動姿態變化仿真結果如圖5所示。

表1 無人機振動仿真條件

圖5 無人機振動姿態變化
圖5表示的是由微型旋翼無人機振動在0.1s時長內所產生的姿態角變化,可以看出微型旋翼無人機受自身電機轉動的影響所產生的振動滿足一階振動模型,姿態角的變化周期與振動周期一致,其姿態角變化范圍在(-3°,3°)之間,則與微型旋翼無人機固連的測向平臺將具有同樣的姿態變化,根據第2節中的推導可知,載體平臺基準誤差必然導致測向結果不準確。
實驗2:根據第2.2節的推導,對振動環境下的無人機相關干涉測向系統進行仿真,分析振動對測向系統的影響。仿真條件見表2,本文以測向結果的均方根誤差作為衡量標準,其定義形式如式(26)

表2 測向仿真條件
(26)


圖6 有/無振動時方位角測向結果
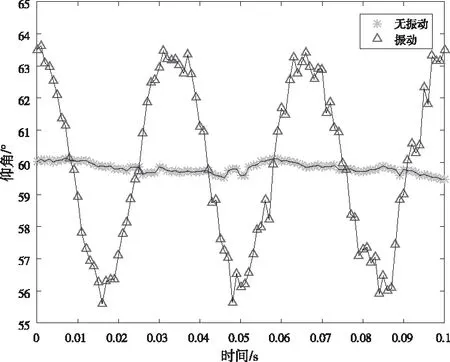
圖7 有/無振動時仰角測向結果
圖6、7分別表示方向角和仰角在有無振動情況下的測向結果,可以看出微型旋翼無人機測向系統存在振動時方位角測量最大誤差可達到8.8°,仰角測量最大誤差可達到3.2°,且測向誤差的趨勢與姿態變化趨勢基本一致,振動所產生的姿態角越大,則測向結果偏離真實值也越大。由表3得到的REMS數值可以看出,在振動環境下,方位角的均方根誤差從無振動時的0.37增至13.88,仰角的均方根誤差從無振動時的0.15增至7.01,可見載體振動給測向系統帶來較大誤差,導致無人機測向無法完成既定任務,因此本文對測向系統的誤差校正是有必要的。
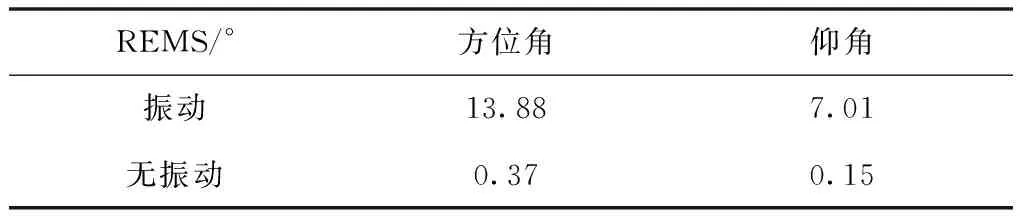
表3 有/無振動時測向RMES
實驗3:最后驗證基于MIMU的微型旋翼無人機測向系統的性能,根據第3節中給出的推導進行仿真,MIMU陀螺漂移0.1°/h,其它仿真條件見表2,仿真結果如圖8、9所示。
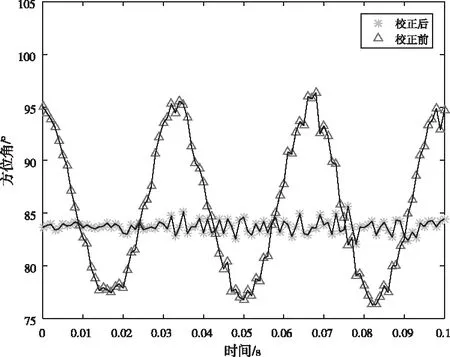
圖8 校正前/后方位角測向結果
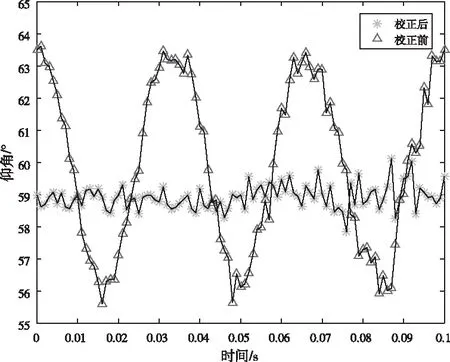
圖9 校正前/后仰角測向結果
圖8、9分別表示方向角和仰角在校正和未校正情況下的測向結果,由圖可見校正后的測向結果比未校正的測向結果在精度上有明顯提升。表4表示測向結果的均方根誤差值,其中,校正后相對未校正的方位角的均方根誤差減小了57.13%,仰角的均方根誤差減小了54.81%。通過上述實驗與分析可以看出,利用MIMU輔助無人機相關干涉測向系統后,測向精度明顯提升,較好的抑制了振動給系統帶來的誤差,有效的提高了該系統在振動環境下的魯棒性。

表4 校正前后測向RMES
5 結論
在微型旋翼無人機測向系統中,自身電機轉動產生的振動會給測向系統帶來誤差,本文針對這一問題,提出了一種基于MIMU的無人機強魯棒性測向方法。本文首先建立了相關干涉測向系統模型及無人機振動模型,并推導出振動所產生的姿態角變化,將其作為誤差輸入相關干涉測向系統,分析了振動對無人機測向系統的影響;然后,利用MIMU測量無人機姿態變化,通過振動姿態信息和校正算法對測向系統進行補償;最后,利用仿真驗證該方法的有效性,仿真結果表明,利用MIMU輔助的強魯棒性微型旋翼無人機測向方法,來波信號方向角和仰角的測向誤差明顯降低,較好的補償了振動所帶來的測向誤差,該測向方法在微型旋翼無人機測向技術中具有一定應用價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
