激光射頻的冷鏈物流定位傳感器布設仿真優化
2021-11-17 12:04:48麻麗娜
計算機仿真 2021年9期
麻麗娜,段 禹
(華北電力大學 科技學院,河北 保定 071000)
1 引言
冷鏈物流泛指冷藏、冷凍類產品在生產、貯藏運輸、銷售,到消費前的每一個環節中通過規定低溫環境來保證質量,降低損耗的一項系統工程[1]。冷鏈物流適用于農產品、速凍食品及藥品等特殊產品的運輸,具備保鮮能力強、運輸效率高、安全性強等優勢[2]。通過冷鏈物流定位能夠實現物流跟蹤,便于物流狀態監控與位置信息查詢,提高發生異常時應急救援的效率[3]。激光技術與無線傳感器技術在物流定位中的作用至關重要,合理的傳感器布設能夠提高定位精度。冷鏈物流定位傳感器布設是當前物流及相關技術領域的重點研究內容,受到的眾多專家與學者的重視,且已出現一些較好的物流定位傳感器布設方法[4-5]。
文獻[6]提出了基于有限包絡圓的傳感器布設方法。為保證傳感器網絡的穩定精度,通過配平來減小傳感器相對位置的不平衡力矩,將各傳感器的布設位置看作變量,采用有限包絡圓方法進行約束,確保傳感器之間互不干涉,結合覆蓋范圍確定各傳感器最終的布設位置。該方法布設傳感器的定位偏差較小,但傳感器布設時間較長。文獻[7]提出了基于TDOF的傳感器布設方法。根據傳感信號到達信號接收傳感器的時間差,結合傳感器信標節點獲取同步節點與定位節點的信息,采用串口方式將TDOF信號發送到主控中心,通過空間坐標計算實現傳感器定位,完成布設。該方法的傳感器布設效率較高,但布設傳感器的定位偏差較大。
針對上述方法中存在的不足之處,提出基于激光技術的冷鏈物流定位傳感器布設方法。通過冷鏈物流定位體系構建定位量測方程,利用微分計算獲得傳感器網絡定位誤差,采用無偏參數估計誤差方差理論確定最小定位誤差集,最終求得傳感器布設位置的全局最優解,實現傳感器布設仿真優化。設計對比試驗,驗證了所提方法在傳感器布設中的有效性。
2 基于激光技術的冷鏈物流定位傳感器布設方法
2.1 基于激光技術的冷鏈物流定位體系
在進行冷鏈物流定位過程中,利用激光射頻技術與無線傳感器來獲取冷鏈物流位置及相關狀態信息。傳感器的布設會影響定位結果的準確性,合理的傳感器布設能夠減小定位誤差,降低成本花銷[8-9]。
通常情況下,部署在冷鏈物流裝置上的冷鏈物流源點信號在傳播過程中,受到障礙物阻擋時,需要以反射、折射與散射等方式傳播[10],對應的傳播圖示如圖1。
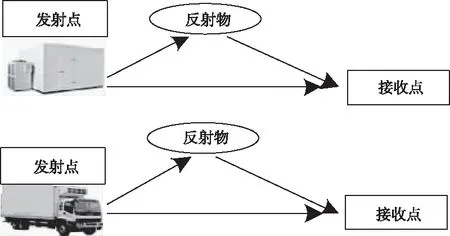
圖1 定位傳感信號傳播圖示
當信標節點的數量為N時,能夠獲取N個測量值,選取測量值集合中所有包含3個距離測量值的子集合,設其數量為k。采用最小二乘法[11]對各組合進行定位估計,獲得信號發射節點的位置向量,初步位置向量X的中間結果描述式如下
k=argxmins(X,Sk)
(1)
其中,Sk代表滿足條件的子集,s為信標節點索引基。
(2)

(3)
式中,Ri代表第i個距離測量值,Xi代表該值對應的信標節點向量,Si代表第k個子集中的組合數據。
重復上述過程,直至P=N,將各組合對應的位置估計與對應的距離均值殘差平方,利用下式加權平均處理后得到冷鏈物流位置數據
(4)
式中,v代表所有得到的子集合數量。
綜上所述即為傳感器冷鏈物流定位的基本原理,為了實現物流區域覆蓋,保證定位結果的準確性,需要進行傳感器布設。
2.2 物流定位傳感器布設建模
采用到達時間差與到達角技術提高物流定位精度,設冷鏈物流定位傳感器位置坐標為Si′(xi′,yi′,zi′),i′=1,2,…,N′,S1代表主定位傳感器,其量測到達角為φ1,對應的位置坐標為(x1,y1,z1),測定目標位置坐標為(x,y,z),各冷鏈物流定位傳感器接收到測定目標信號的時間為ti′,利用下式給出量測方程
(5)

(6)
式中,t1代表主定位傳感器接收到測定目標信號的時間,ci′代表傳感器i′的量測系數,(xi′,yi′,zi′)為對應傳感器的位置坐標。
通過對上述方程的微分計算,可得到如下所示的綜合定位誤差方程
dV=C·dX0+dXs
(7)

若系數矩陣C的廣義逆存在,則有定位誤差的協方差矩陣如下

(8)
結合無偏參數估計誤差方差理論,給出達到時間差、到達角測定誤差的協方差矩陣Q=E[dV·dVT],則誤差方差的理論下界為

(9)
式中,C0=C|(x=x0,y=y0,z=z0),其中(x0,y0,z0)代表定位量測目標的實際坐標。
采用遺傳算法優化并確定各傳感器的布設位置,將各冷鏈物流定位傳感器的坐標Pi′(xi′,yi′,O)編為碼長為M的兩組二進制碼,M的值根據傳感器區域Z1及其自身定位精度確定。二進制碼中分別采用0和1表示正數和負數,染色體向量組θ=[x1,y1,x2,y2,…,xN′,yN′]的編碼長度為N1=2×M×N′。

(10)


(11)
為避免編碼取值超出傳感器分布限定區域,采用懲罰函數f進行約束,函數式如下
(12)
(13)
綜合上述分析與計算,得到適應度函數表達式f(θi′)

(14)
在遺傳選擇算子中添加相似度及比重控制,相似度大小能夠體現個體與目標個體的接近程度,相似度F(θi′)的計算式為
F(θi′)=f(θi′)
(15)
比重用于描述適應度值與某一個體相同或接近的個體在整個種群中的占比情況,設種群內適應度最大的個體為θmax,適應度最小的個體為θmin,則比重控制函數G的表達式如下
(16)
其中,J表示比重控制系數。
當個體適應度值f(θi′)的取值范圍為[f(θmin)+(J-1)·G,f(θmin)+J·G],設滿足條件的個體數量為n′,種群規模為S′,個體θi′所占比重C(θi′)=n′/S′,綜上,θi′的選擇概率計算式為
(17)
根據上式計算結果,利用輪盤賭方式進行個體選擇。
采用改進遺傳算法的協調系數,并在此條件下,進行交叉與變異操作,交叉操作選擇二點交叉方式進行。
完成上述操作后,構建優質個體群,選擇各代中的優質個體添加到該群內,每隔一定的進化代數后,按規定比例剔除該群內的低適應度個體,最終確定優質個體,據此確定各冷鏈物流定位傳感器位置,據此進行傳感器布設。
3 實驗結果與分析
為了驗證所提基于激光技術的冷鏈物流定位傳感器布設方法的綜合有效性,需要進行一次仿真,實驗環境為Matlab 2014a,實驗平臺為32位、Windows XP系統,CPU型號為Intel Pentium G2030,頻率2.6GHz,內存空間32GB。
3.1 最佳適應度變化
采用所提方法進行實驗,觀察遺傳進化代數與最佳適應度值間的關系,實驗中種群規模設定為100個,最大遺傳進化代數設定為60,得到的實驗結果如圖2所示。
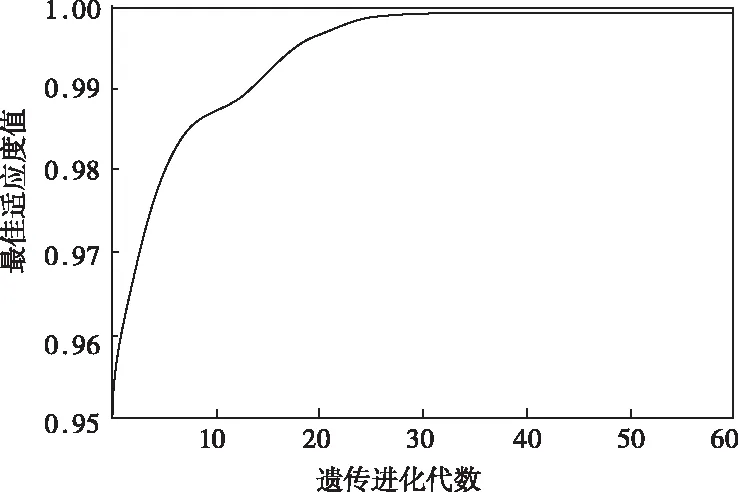
圖2 最佳適應度變化曲線
根據圖2可知,遺傳代數在0~30以內時,隨著遺傳進化代數的增加,種群的最佳適應適度值逐漸增加;遺傳進化代數為30時,種群最佳適應度值趨近于1;遺傳進化30代以后,種群最佳適應度值基本處于平穩狀態,說明進化代數為30時,即可獲取傳感器布設最佳方案。
3.2 傳感器的定位偏差
采用所提方法與限包絡圓的傳感器布局方法、TDOF的傳感器布局方法進行實驗,對比各方法所布設傳感器的冷鏈物流定位偏差,為保證實驗結果的準確性,共進行8次定位實驗,得到實驗結果如表1、所示。表1中YA代表所提方法,YB代表限包絡圓的傳感器布局方法,YC代表TDOF的傳感器布局方法。
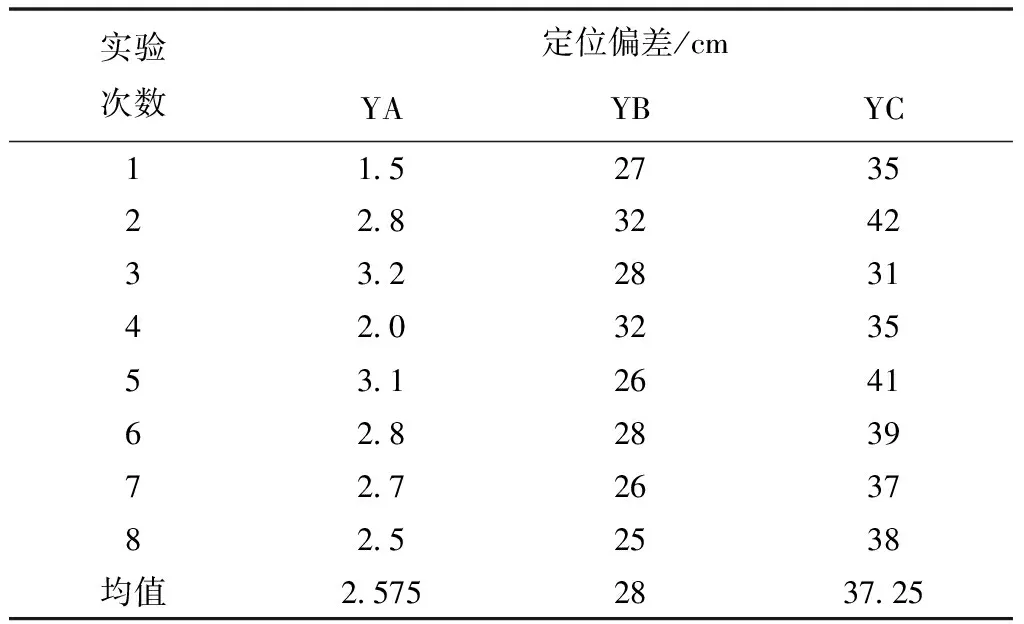
表1 各方法布設傳感器的定位偏差
分析表1數據可知,當進行第3次數實驗時,限包絡圓的傳感器布局方法的定位偏差為28cm,TDOF的傳感器布局方法的定位偏差為31cm,所提方法的定位偏差僅為3.2cm。當進行第8次數實驗時,限包絡圓的傳感器布局方法的定位偏差為25cm,TDOF的傳感器布局方法的定位偏差為38cm,所提方法的定位偏差僅為2.5cm。計算此次實驗的誤差均值,限包絡圓的傳感器布局方法為28cm,TDOF的傳感器布局方法為37.25cm,所提方法為2.575cm。所提方法的定位偏差遠遠小于其它方法,說明所提方法的定位精準度較高。
3.3 傳感器布設時間
為驗證傳感器布設效率,采用所提方法與限包絡圓的傳感器布局方法、TDOF的傳感器布局方法進行實驗,對比各方法所布設傳感器的傳感器布設所需時間,為保證實驗結果的準確性,共進行8次定位實驗,得到實驗結果如表2所示。
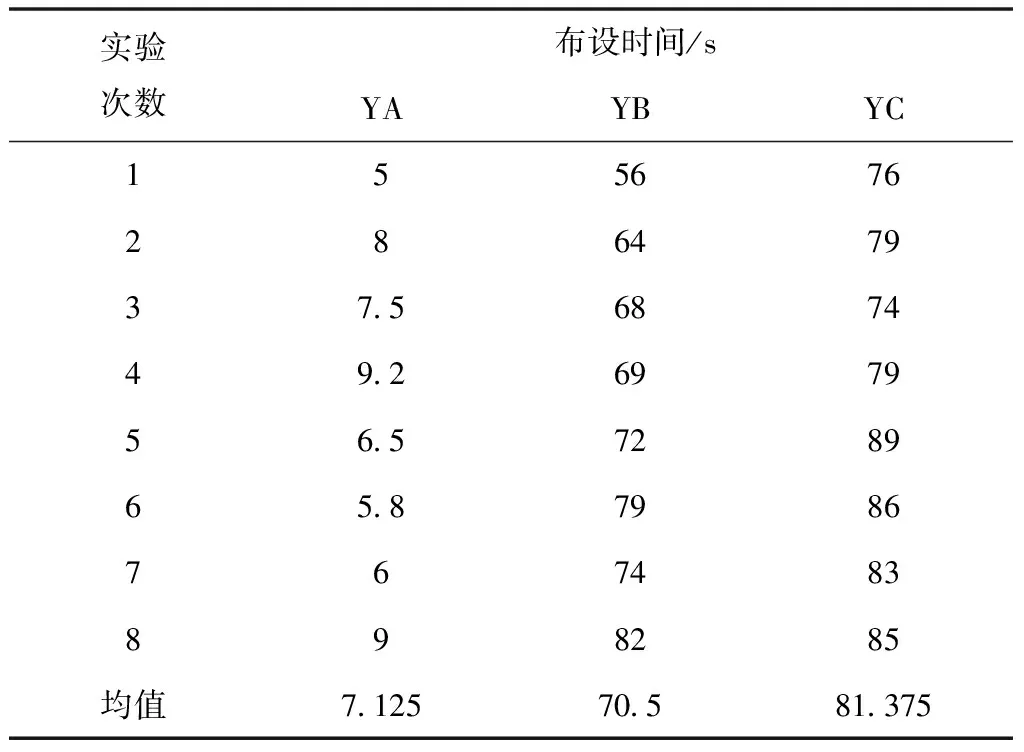
表2 各方法傳感器布設時間比較
分析表2數據可知,當進行第2次數實驗時,限包絡圓的傳感器布局方法的傳感器布設時間為64s,TDOF的傳感器布局方法的傳感器布設時間為79s,所提方法的傳感器布設時間為8s。當進行第6次數實驗時,限包絡圓的傳感器布局方法的傳感器布設時間為79s,TDOF的傳感器布局方法的傳感器布設時間為86s,所提方法的傳感器布設時間為5.8s。計算此次實驗的傳感器布設時間均值,限包絡圓的傳感器布局方法為70.5s,TDOF的傳感器布局方法為81.375s,所提方法為7.125s。所提方法的傳感器布設時間遠遠小于其它方法,說明所提方法的布設效率較高。
3.3 冷鏈物流定位時延
為了進一步驗證所提方法的有效性,采用限包絡圓的傳感器布局方法、TDOF的傳感器布局方法以及所提方法對冷鏈物流定位時延進行檢測,得到結果如圖3所示。
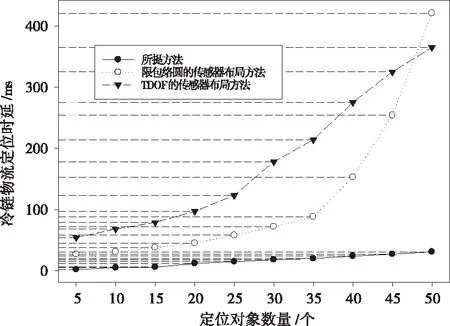
圖3 不同方法下冷鏈物流定位時延
分析圖3可知,定位對象個數越多,冷鏈物流定位時延越大。當定位對象個數為15個時,限包絡圓的傳感器布局方法的冷鏈物流定位時延為38ms,TDOF的傳感器布局方法的冷鏈物流定位時延為79ms,所提方法的冷鏈物流定位時延為6ms。當定位對象個數為50個時,限包絡圓的傳感器布局方法的冷鏈物流定位時延為421ms,TDOF的傳感器布局方法的冷鏈物流定位時延為365ms,所提方法的冷鏈物流定位時延為31ms。所提方法的冷鏈物流定位時延較低,說明所提方法對傳感器布設后反應速度得到有效提升。
4 結論
物流網絡信息化是物流產業發展的重要條件之一,特別對于冷鏈物流至關重要,激光技術與傳感器網絡技術提高了物流信息采集的效率,能夠及時獲取冷鏈物流各階段的相關信息,在物流監測、跟蹤中應用廣泛。
為提高冷鏈物流定位精度,通過相關算法的學習與研究,提出基于激光技術的冷鏈物流定位傳感器布設方法,通過仿真,得出以下結論:
1)所提方法的定位精準度較高,當進行第8次數實驗時,所提方法的定位偏差僅為2.5cm。
2)所提方法的布設效率較高,當進行第6次數實驗時,所提方法的傳感器布設時間為5.8s。
3)經過所提方法布設后的傳感器反應速度得到有效提升。當定位對象個數為50個時,所提方法的冷鏈物流定位時延僅為31ms。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
現代企業(2015年2期)2015-02-28 18:45:09