一種具備自動感光和防疲勞駕駛的智能車用遮陽板
2021-11-12 02:17:14黃孝慈朱祉彧張海波
智能計算機與應用 2021年9期
張 寅,黃孝慈,李 超,朱祉彧,張海波
(上海工程技術大學 機械與汽車工程學院, 上海 201620)
0 引 言
隨著中國汽車行業的快速發展,國內的汽車保有量日益劇增且交通事故頻率越來越高,根據美國國家公路交通安全管理局(NHTSA)交通事故數據分析可知,每年由太陽的眩光引發的事故高達數千起,道路交通事故率超過16%。市面上的車用遮陽板主要是由遮陽板體和遮陽板轉動軸構成。遮陽板轉動軸固定在主駕駛或副駕駛前方頂棚上,可繞遮陽板轉動軸轉動。駕駛途中,駕駛員的注意力會被手動調節遮陽板而分散,存在著一定的安全隱患。
隨著汽車技術不斷的發展與完善,在行車安全輔助系統中,遮陽板占據著重要地位。在遮陽板的原有基礎上進行改良設計,有利于提升汽車的智能性和人性化。控制系統是智能車用遮陽板系統的關鍵,是一個集數據采集、數據計算等功能于一體的系統裝置,是現代智能化、機電一體化的重要組成部分。
綜上所述,通過對智能遮陽板控制系統的研究和開發,可以減少眩目對駕駛員的危害及不必要的動作導致的交通事故,保障了駕駛員行駛的安全性。不斷完善及應用智能控制系統能極大地促進道路交通安全,彌補了汽車智能化的空缺。
1 智能車用遮陽板的結構設計
智能遮陽板總體結構包括遮陽板板體、遮陽板轉軸、遮陽板轉動驅動裝置總成及其內置的電控模塊、環境光傳感器、太陽能電池板,如圖1所示。遮陽板體連接遮陽板轉軸并可由其帶動轉動,遮陽板轉軸另一端深入遮陽板驅動裝置殼體內,連接至遮陽板驅動電機。同時,電機利用傳動裝置帶動遮陽板向內側轉動。環境光傳感器感應環境光強,其信號線連接至驅動遮陽板驅動裝置總成內置的電控模塊,通過光感信號控制電機輸出轉數,以控制遮陽板體和遮陽板轉軸的轉動。攝像頭安裝在驅動遮陽板轉動驅動裝置總成殼體外側,其信號線連接至驅動遮陽板轉動驅動裝置總成內置的電控模塊。攝像頭對準駕駛員面部位置,拍攝駕駛員的面部照片,通過電控模塊的芯片內置程序分析駕駛員是否疲勞。
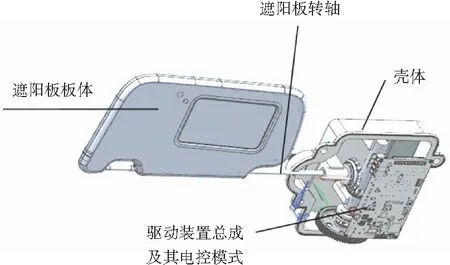
圖1 智能遮陽板的總體結構
2 硬件電路設計
智能遮陽板控制系統的硬件設計是采用各獨立子系統配合完成作業的設計方法,分為控制芯片Arduino UNO電路單元、電源的管理單元、環境光傳感器采集單元、直流驅動電機單元。
要求所設計的控制系統具備采集光照強度且轉換成PWM信號來控制電機的功能,實現在一定的太陽光照下,遮陽板能夠轉到相應的角度。
智能遮陽板項目中有3種方式控制遮陽板的動作:
(1)用外部單片機或電腦輸入交替脈沖信號經Arduino處理后控制步進電機以時間間隔T進行正轉至角度θ切換反轉,從而帶動遮陽板重復放下收起動作;
(2)通過環境光傳感器根據不同光強輸入信號經Arduino處理后控制步進電機轉動,光強增加時,驅動步進電機逆時針旋轉使遮陽板至θ時停止;光強減少時,步進電機順時針旋轉帶動遮陽板至水平復位;
(3)手動調試模式則是通過電位器控制步進電機旋轉帶動遮陽板至任意特定角度。
3 控制系統軟件設計
控制系統由以下幾個模塊組成:單片機初始化模塊、環境光傳感器采集模塊、電機控制模塊、駕駛員眼部圖像識別模塊。采用模塊化形式分別編程,最后將所有程序結合在一起,使得結構清晰。
(1)單片機的初始化模塊包括:IIC主機模塊、PWM模塊初始化;
(2)環境光傳感器采集模塊:環境光傳感器檢測到光強,并將返回信號輸入單片機的輸入端口,程序不間斷地讀入輸入端口的信號,通過計算得出合適的PWM信號控制電機角度;
(3)電機控制模塊:電機控制端通過傳感器直接輸出的PWM信號控制電機輸出軸的轉動角度;
(4)駕駛員眼部識別模塊:通過攝像頭捕捉駕駛員眼部區域,將獲取得到的照片輸入,通過識別照片上臉部表情特征判定駕駛員是否處于疲勞狀態。
人臉識別系統做為主要利用OpenCV、Tensorflow和Pytorch框架構建而成。下載并調用 OpenCV 視覺處理庫中提供的數據集,利用深度學習的目標檢測器對數據集中的圖像進行人臉檢測[1]。
數據集中圖像主要來自攝像機采集,并利用相關標注軟件對圖片進行標注。利用圖片二值化的預處理方法,可降低模型對圖像大小以及位置的敏感性。根據需要,更改文件里面的迭代次數等參數。算法通過標注文件中的位置數據,搜索人臉所在的位置。通過訓練人臉檢測器,最終訓練權重將保存至相應文件夾下。訓練階段主要是在數據集中提取出特征關鍵點,將圖片的最大特征值與對應的標注信息定義為元空間的各個子集。如果需要添加新圖像,這些子集可更新,并重新進行訓練。然后,調用專屬文件,判斷輸入圖片是否屬于人臉圖像,如果是,則可以利用算法中設置的預選框搜尋,擬合圖像中人臉的位置。如若識別的一個未知的人臉圖像,則需要將圖片和其標注信息添加到模型中,重新訓練人臉檢測器[2]。
臉部表情識別算法基于OpenCV和Pytorch搭建出的系統框架來實現的。通過對Gabor小波變換的特征進行提取,用Gabor小波變換系數向量代替圖像的灰度特征,以減弱圖像對光照和位置的敏感性。同時,使用PCA/LDA Fisher判別分析法對Gabor向量進行降維,提取特征空間的高特征的子空間進行訓練[3]。利用C均值動態聚類的方法構造表情判斷模板,分別包括點頭頻率、打哈欠、眨眼頻率3種常見行為模式[4]。最后,使用K近鄰判別法將各個子表情模板待識別的圖像進行匹配[5]。
本系統采用Mixly和Arduino IDE控制系統,程序采用C++和python混合編寫,提高了系統研發效率,方便了程序的設計[6]。
檢測光照的強弱性的控制器主要存在于反饋控制系統中,能夠通過比較檢測量和給定量來計算控制量。為了確保遮陽板轉動的角度適合,系統的控制變量主要是電機的轉動時間,使遮陽板能以最快的速度轉動。系統要確保在接近轉動臨界點的時刻盡快減速,且角度偏差要小,由此遮陽板才能平滑地轉動。重新檢測光照強度時,遮陽板的角度要以初始的位置為基礎,計算電機的轉動時間并且跟當前位置做比較,調整轉動時間并彌補正向(反向)角度進行轉動。
4 結束語
本文基于遮陽板國內外現有的相關研究和設計,結合機電一體化概念,改進傳統遮陽板的工作模式,賦予其更多功能,提高了汽車遮陽板的實用性和行駛時的安全性。減少了交通事故發生率。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
汽車電器(2018年1期)2018-06-05 01:22:54