基于三維重構數據的輸電線路通道智能清理
2021-11-09 08:27:02陳正宇
山西電力 2021年5期
關鍵詞:模型
陳 杰,陳正宇
(中國能源建設集團江蘇省電力設計院有限公司,江蘇 南京211102)
0 引言
隨著國民經濟的不斷發展,我國輸電走廊、輸電線路輸送容量越來越大,輸送距離越來越長,使輸電走廊通道日益緊張。輸電走廊通道對路徑合理性、可行性、工程投資和建設進度有較大影響,妥善處理通道清理對工程建設至關重要。基于重構數據的通道清理創新統計方法,對通道內房屋、林木進行識別和單體化建模,根據通道清理原則繪制控制范圍面,自動選取需處理的房屋或林木信息,大幅度地提高了工作效率。
1 基于點云的房屋拆遷量自動統計與林木智能調查
通過點云濾波獲得對應的建筑物分類點云,采用隨機抽樣一致性RANSAC(random sample consensus)算法自動提取房屋頂面,基于Delaunay三角網提取房屋的頂面輪廓,采用強制正交最小二乘法進行房屋頂面輪廓的規則化,獲得單層房屋的面積;根據經驗值設定高度閾值自動判定房屋的樓層,從而獲得房屋的面積;自動計算輸電線路與房屋角點的最近偏距,完成房屋拆遷的判定,從而實現滿足初步設計要求的房屋拆遷量自動統計;利用激光雷達多回波的特性,采用面向單木提取的激光點云分割算法智能獲取輸電線路設計關心的高聳林木的密度、行距、株距、胸徑等信息,自動完成林木信息的統計調查;通過輸電線路房屋拆遷量、林木信息等工作的自動統計,為輸電線路路徑的優化設計提供數據支撐。
1.1 房屋面積統計
根據地物特征設置不同的特征參數,預先對原始點云進行分類,并通過人工編輯得到分類成果。在對水系、電力線、道路分類時,仍需要人工借助影像和點云數據進行判讀實現分類。
在點云數據的后處理中,已經將房屋點云提取出來,而要實現自動面積計算統計,就需要提取房屋頂面輪廓和獲取房屋的高度這兩項重要信息。本文提出的基于RANSAC的建筑物頂面提取方法是一種穩健的模型參數估計算法,它根據一組含有異常數據的數據集,計算出數據的模型參數,得到有效樣本數據。RANSAC算法的基本思想如下[1]。
a)考慮1個最小抽樣集的勢為n的模型(n為初始化模型參數所需的最小樣本數)和1個樣本集P,P的樣本數num(P)>n,從P中隨機抽取包含n個樣本的P的子集S初始化模型M。
b)余集CpS=PS中與模型M的誤差小于某一設定閾值t的樣本集以及S本身構成S*。S*認為是模型M的內點集,它們構成S的一致集。
c)若num(S*)≥N(其中N表示正確模型所含一致集的最小個數),認為得到正確的模型參數,并利用集S*(內點)采用最小二乘等方法重新計算新的模型M*,重新隨機抽取新的S,重復以上過程。
d)在完成一定的抽樣次數后,若未找到一致集則算法失敗,否則選取抽樣后得到的最大一致集判斷內外點,算法結束。
RANSAC算法具有效率高、運算快并且計算精度高的特點[2]。因此,本課題利用RANSAC算法提取房屋頂面的三維模型。實驗表明,RANSAC擁有強大的抗噪聲能力,能夠實現良好的房屋頂面提取效果。
在提取房屋頂面之后,需進一步進行建模分析處理,必須從離散的點云中提取建筑物的頂面輪廓。本課題首先基于Delaunay三角網提取房屋的頂面輪廓,再基于強制正交最小二乘法進行房屋頂面輪廓的規則化[3]。圖1為建筑物輪廓規則化流程圖。實驗獲取的房屋頂面輪廓經過實地驗證,精度優于點云的平均間隔距離,達到了“亞像元”的精度。
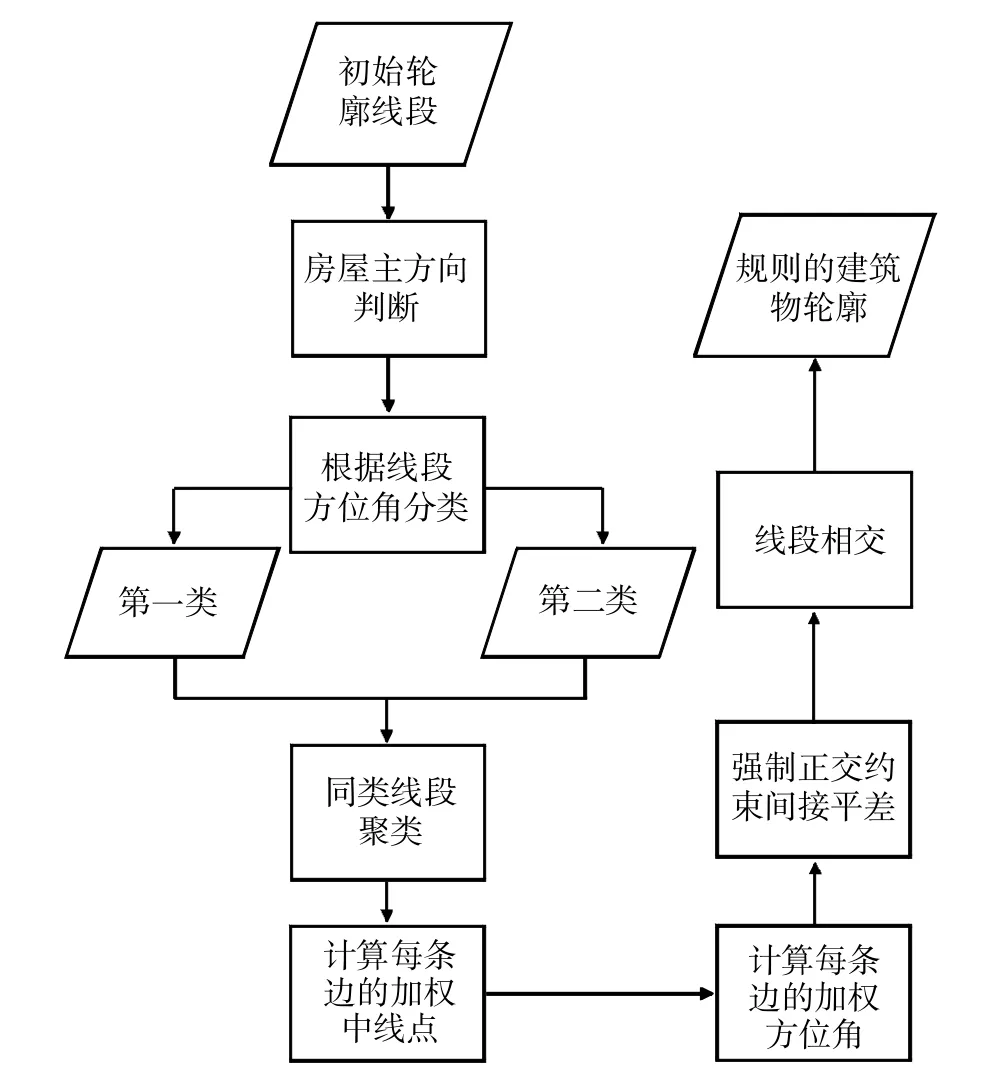
圖1 建筑物輪廓規則化流程
獲取了建筑物頂面輪廓,再與RANSAC提取的空間三維平面結合,即可構建房屋頂面的空間三維模型。得到矢量化后的單體房屋模型后,再利用無人機生成的數字高程模型DEM(digital elevation model)和數字表面模型DSM(digital surface model),經過空間差值運算,生成歸一化數字表面模型NDSM(normalized digital surface model)[4],以判斷房屋的高度,從而估計房屋的面積。將層數的屬性值賦予每一個房屋的面,從而可以自動計算出房屋面積。接下來進一步對線路通道內房屋的總面積進行估計,就可為房屋拆遷面積統計提供可靠支撐。
對線路路徑做拆遷范圍之內的緩沖區分析,將緩沖區(拆遷范圍)與房屋矢量做空間計算,統計與緩沖區相交的房屋面積,全部相交求和即為輸電線路全路徑的房屋拆遷預估量。
經過驗證,用激光雷達數據估算的線路房屋拆遷量與實地測量得到的拆遷量相比,兩者相差不大,僅相差7.5%,滿足對于成本計算的要求。由此證明,基于激光雷達的分類精度和統計方法是十分高效和精確的,具有良好的應用前景和推廣價值。
兵馬未動糧草先行。云南電網提前建立應急物資儲備臺賬,明確應急物資儲備地點并梳理了應急物資需求,并連夜從普洱運送移動變電站支援。金沙江沿江各供電所、變電站、生產駐點已做好值班值守工作,梳理檢查維護發電裝備,清理應急搶險物資,準備低壓供電套裝,應急搶險隊伍進入待命狀態。
1.2 林木砍伐統計
考慮到輸電線路工程的政策處理成本和施工成本,輸電線路穿越林區時,需要評估被穿越林區的面積和體積。采用激光雷達測量技術,通過發射并搜集激光點云,可獲取林區的樹高和樹冠等集合特征后合成林地空間結構初步模型,也可判別樹木種類、林分結構參數,如胸徑、樹木干枝結構、孔隙度、LAI、葉面積密度、冠層高度輪廓等,最后估算出輸電線路勘測、設計、施工與后期運行中的林地損失。另外,可以用專業軟件對林區內樹木的點云數據通過單木分割法來提取單木結構信息,從激光雷達點云中識別樹冠頂點、樹冠邊界、位置等屬性。
林分結構信息提取常采用高度分布法,即從點云中直接計算高度分位數、回波指數等點云特征量,或者按照指定的高度間隔生成頻率或強度合成波形,計算波形分位數、波形前沿、波形后沿等波形特征量,根據點云特征量、波形特征量與地面測量值之間的關系,估測森林結構參數。對于高郁閉度區域,使用SLAM獲取點云提取林下地形精度可達厘米級。
依據《110~750 kV架空輸電線路設計規范》(GB 50545—2010),結合環保要求以及沿線線路通道工作經驗,林木砍伐主要控制因素如下。
a)跨越林區時,導線與樹木(考慮自然生長高度)之間的垂直距離不小于7 m;導線與果樹、經濟作物、城市綠化灌木以及街道行道樹木之間的垂直距離不應小于7 m。
b)線路通過公園、綠化區或防護林帶,導線與樹木之間的凈空距離在最大計算風偏情況下不小于7 m。
對于林木砍伐設計,需考慮導線對林木垂直距離和風偏凈距兩個因素。在常規二維平面下,林木的垂直凈距較易計算,但是風偏后的凈距受弧垂變化、風偏后地面高程變化等信息影響,設計深度也很難滿足。對于平地線路,由于其地面高程基本不變,通過計算導線檔中弧垂,輔以風偏角度,生成紡錘狀的控制范圍,可基本滿足設計深度要求。但對于山區線路,其四周地面高程不斷變化,風偏凈距控制的林木砍伐范圍基本無規律可言,僅能通過大量采集風偏危險點生成風偏斷面,再人為判斷砍伐范圍,效率低下,準確度較低。
依據林木砍伐原則,計算垂直距離和風偏凈距情況下的砍伐控制面。考慮導線實際位置和最大風偏位置,以此畫一個距導線7 m的弧(砍樹線),對地面樹木以地面高程為準,向上平移樹木自然生長高度,當其高于砍樹線時,則為需要砍伐的范圍。
根據樹木信息,結合各地制定的樹木自然生長高度數值,自動生成林木自然生長高度面。根據三維排位成果,生成導線靜止和風偏情況下的砍伐控制面,而后計算砍伐控制面與自然生長高度面的重合區段,對需砍伐的單木信息進行標記。根據樹木標記結果,平地段可生成紡錘狀的林木砍伐一覽圖,山區段可生成實際林木砍伐一覽圖。
根據激光點云的單木分割數據,自動統計位置、高度、冠幅、樹冠面積和樹冠體積等信息,通過對砍伐區域的空間計算,可以智能化地統計線路中的樹木砍伐量。
2 幾種通道清理方法的對比
幾種通道清理的測量技術方案對比情況如表1所示。

表1 各測量技術方案比較表
由表1可知,常規測量技術雖然成本較低,但其房屋、林木需要人工提取,精度也不高。傾斜攝影和激光雷達技術數據精度高,可自動識別通道中房屋及林木,尤其是激光雷達數據可識別單棵樹木,具有更高精確度。對于通道清理,可研階段可以采用常規的測量方法進行數量估算,而施工圖階段則應在常規測量方法基礎上配合外業數據,或采用傾斜攝影或激光雷達技術。因此,三維通道清理系統主要基于三維重構數據。
3 結束語
傳統的通道清理工作模式人工參與多、效率低、易出錯。本文通過創新的三維通道清理模式,對通道內房屋、林木進行識別建模,結合已排位路徑,根據通道清理原則繪制控制范圍面,并計算重疊面,達到自動化、智能化統計的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
