基于多旋翼飛控平臺的巖體節理信息提取研究
2021-10-20 09:55:22雷永順王文軍
金屬礦山 2021年9期
雷永順 李 飛 王文軍 鄔 金,3 徐 帥
(1.甘肅酒鋼集團宏興鋼鐵股份有限公司,甘肅嘉峪關735100;2.東北大學深部金屬礦山安全開采教育部重點實驗室,遼寧沈陽110819;3.遼寧裝備制造職業技術學院工商管理學院,遼寧沈陽110161)
巖體結構面是決定巖體穩定性的關鍵因素。巖體結構面中規模相對較小、分布較集中的稱為節理裂隙,其產狀、形態及其相互間的排列組合關系直接影響區域巖體的力學效應和巖體工程穩定性[1]。因此,準確、快速、全面地采集節理信息數據對于地質勘察,工程設計、評價和施工都有重要意義[2]。隨著工程地質等領域相關科學技術的發展,巖體結構面信息采集方法也在不斷進步。采集方法按照工作人員操作方式的不同可分為接觸式巖體結構面信息采集法與非接觸式巖體結構面信息采集法。
接觸式巖體結構面信息采集法主要包括測窗、測線法和羅盤量測法。接觸式測量方法需要測量人員手持設備接觸工程巖面采集節理裂隙信息,工作量大、勞動強度高、費時費力,在高邊坡等危險環境中,測量工作存在較大風險,并且數據精度受測量人員主觀因素影響較大[3]。針對上述不足,近年來國內相關專家學者提出了改進方案,黃磊等[4]基于測窗、測線法數據提出了巖體結構面直徑的新算法,對結構面信息采集結果進行了統計優化;王貴賓等[5]擴展了測線法統計節理平均跡長的理論基礎,采用擴展的測線法統計了巖體節理的平均跡長,效果較好;萬斌等[6]通過修正磁偏角和控制鐵器影響范圍,減小了現場環境對羅盤工具的影響,進而減小了羅盤測量法的誤差。上述工作只是從數據處理、誤差修正等方面對測量方法進行優化,未能從根本上解決接觸式測量法存在的工作量大、數據統計易受人為因素影響的問題。
非接觸式巖體結構面信息采集法主要包括三維激光掃描法和攝影測量法,該類方法無需測量人員手持設備接觸工程巖面即可完成工程巖面節理裂隙信息采集工作,已成為巖體結構面信息采集工作的發展方向。在三維激光掃描方面,國外KOCAK等[7]于1999年首次將三維激光掃描技術應用于海底巖層露頭勘察中;2001年,FENG等[8]提出了應用三維激光掃描技術測量巖體裸露面的理論方法,并于2003年將其應用到巖體結構面粗糙度和跡線測量中,為該項技術的實際應用開創了先河。近年來,國內金鑫[9]以邊坡巖體的三維點云數據為基礎,開展了巖體結構面智能識別系統研究,提高了從復雜、不規則點云數據中進行結構面表面模型重構及優勢產狀分組的工作效率;李杰林等[10]為了精確獲取地下巷道的結構面信息,基于三維激光掃描技術,開展了地下礦山巷道巖體結構面探測及識別研究,通過與傳統測量手段對比,證明了三維激光掃描測量獲取的結構面數據更豐富、全面且準確。但相較于攝影測量,三維激光掃描結果多為點云數據,不利于工程地質參數提取,且由于硬件設備固有精度及后期數據處理等原因,存在操作繁瑣、誤差較大等問題。在攝影測量方面,早在20世紀70年代ROSS-BROWN等[11]首次應用攝影攝像圖片解譯方法對節理的走向和跡線長度進行了測量,測量結果與傳統監測方法相比,精度有明顯提升;LAURA等[12]采用高陡邊坡的連續拍攝圖像與現場量測數據相結合進行了邊坡動態監測;KIM等[13]通過攝影測量技術調查了巖質邊坡的結構面發育情況,并對邊坡破壞模式進行了反演分析;王鳳艷等[14]應用數字近景測量技術在采石場邊坡開展試驗,并提取了邊坡巖體結構面的跡長和產狀等信息。上述應用取得了顯著成效,但是,用以進行巖體節理裂隙調查的攝影設備普遍較笨重、且受調查區域地形環境及巖體工程施工要求等因素限制,工作人員往往無法深入調查區域及時有效地獲取巖體節理裂隙信息。
無人機航拍技術的發展給地質調查工作提供了新思路。當前無人機航拍視頻圖像的清晰度與分辨率等參數精度完全可以達到節理圖像尺度的識別要求,且輕型無人機體積小、價格低廉、操作步驟簡單;依靠設備自帶的定位操作系統,能夠使無人機輕易抵達測量人員或其它手持式設備無法到達的地質勘查區域開展工作。基于此種思路,賈曙光等[15]分析了無人機航拍技術在高陡邊坡地質調查中的應用,提出了一套使用無人機采集巖體結構面信息的工作流程;趙明宇等[16]采用無人機攝影測量技術獲取巖體結構面信息,提取了結構面二維跡線及產狀等信息;李水清等[17]利用無人機攝影測量技術半自動統計了巖體結構面的產狀信息,并與人工實測值進行了比較分析,驗證了方法的可行性。上述研究重點在于針對巖體結構面傾角、傾向信息提取,對于結構面三維間距、跡長等關鍵參數的統計分析涉及較少,且相應工作流程中關于無人機現場航拍部分的工作步驟有待進一步簡化,后期三維巖體結構模型的建模效果也有待提高。為此,本研究提出一種基于多旋翼飛控平臺的巖體節理裂隙信息提取方法,通過多旋翼飛控平臺精準、快速地對局部區域的節理裂隙發育情況進行現場航拍調查,并根據拍攝圖像開展區域三維地質建模及結構面繪制等工作,快速且有效地提取局部巖體節理裂隙信息。所提出的巖體節理調查方法可以有效降低節理裂隙調查工作的工作量、節省成本,可為大范圍、高精度提取巖體節理信息提供參考。
1 基于多旋翼飛控平臺的巖體節理信息提取系統
基于多旋翼飛控平臺的區域巖體節理信息提取系統包括多旋翼航拍無人機、3DF照片建模軟件及Sirovision圖像處理軟件。
1.1 硬件
多旋翼無人機選用DJI大疆公司新一代消費級無人機御Navic Air 2,飛機實物如圖1所示。該款直升機搭載1/2英寸影像傳感器,可拍攝4 800萬像素的照片及4 K/60FPS(每秒傳輸幀數(Frames Per Second))MP4格式的視頻,圖傳距離達10 km。該款無人機為多旋翼無人機,可依靠多個旋翼產生的升力來平衡飛行器自身重力;通過改變每個旋翼的轉速來控制飛行器姿態,使無人機實現垂直起降、懸停拍攝并在一定速度范圍內以任意姿態飛行拍攝[18]。
1.2 軟件系統
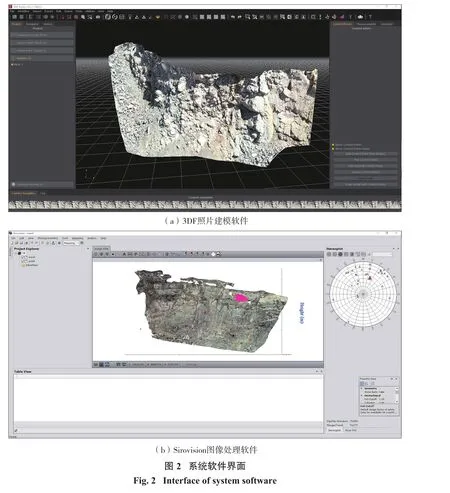
(1)3DF建模軟件。3DF建模軟件由意大利烏迪內大學(University of Udine)下屬的3Dflow軟件公司研發,是一款可用于攝影測量、真實感三維建模、三維處理和三維視覺效果展示的商用三維圖片建模軟件,可以利用無人機航拍獲得的視頻文件,對現場工程巖面進行三維虛擬重構(圖2(a))。

(2)Sirovision軟件。Sirovision軟件由澳大利亞聯邦科學與工業研究組織(CSIRO)研發,是一款專門用于開展礦山和巖體工程節理裂隙調查及分析研究,繼而輔助開展巖體穩定性評價工作的軟件系統(圖2(b))。
1.3 系統工作流程
基于多旋翼飛控平臺的巖體節理裂隙信息提取系統工作流程包含外業測量與內業建模兩部分,作業流程如圖3所示。外業測量是指多旋翼無人機飛控平臺按照規劃好的航拍線路,對工程巖面進行結構面信息采集工作;詳細劃分為勘察節理調查區域、規劃無人機航拍路線、布置坐標控制點以及無人機現場航拍4個部分。巖體工程現場環境復雜,為保證無人機獲得清晰的航拍圖像,完整記錄巖體結構面信息,保證后期建模效果,盡可能選取節理裂隙發育特征明顯、結構面產狀具有代表性的工程巖面展開調查;按照無人機航拍高度、拍攝距離及待測工程巖面面積等參數合理規劃無人機航拍路線;在待測工程巖面上布置坐標控制點,并利用測繪設備讀取控制點三維坐標,便于后期提取結構面空間信息;無人機拍攝時應預先排除車輛、人員、工業設備等干擾因素,保證良好的巖體結構面勘探環境。

內業建模是指利用航拍視頻數據重構工程巖面的三維模型,進行節理裂隙信息提取工作,包括航拍視頻數據處理、重構區域巖體三維模型、三維模型坐標真實化以及節理裂隙信息提取4個部分。航拍得到的原始視頻數據需要按實際要求拆分為數量不等的圖片數據,才能利用圖片建模技術重構巖體三維模型。重構模型的優劣性在很大程度上依賴航拍視頻的質量,對于建模失敗或質量無法滿足節理信息提取要求的模型,需排查外業測量流程中的各個環節,重新進行航拍測量,直到模型滿足后續工作要求。為精確統計結構面走向、傾向等產狀信息,將現場布設的控制點坐標信息導入生成的三維模型,使模型空間信息與工程巖面信息(走向、傾向)相匹配。在模型表面進行巖體結構面繪制時,軟件將根據繪制結果自動提取巖體結構面信息,并對結構面產狀與分布特征進行統計分析。
1.4 系統特點
相比于當前其它節理裂隙調查系統,基于多旋翼飛控平臺的巖體節理裂隙信息提取系統特點為:①方便快捷地測繪現場巖體結構,采集節理裂隙信息,降低工人的工作量;②實現無接觸測繪,可在保障工作人員安全的同時擴大測繪范圍;③快速詳盡地對巖體結構信息進行統計分析,并生成相應的調查報告;④方便巖體結構面信息管理,為后續巖體穩定性分析和質量分級工作奠定基礎。
2 關鍵技術問題研究
2.1 區域節理巖體無人機視頻采集
如圖4(a)所示,無人機在對工程巖面進行視頻圖像采集過程中,應按照無人機拍攝距離L與拍攝工程巖面高度S等條件設計合理的航拍計劃。整個航拍工作過程應遵守以下兩個原則:①應確保無人機航拍的視頻圖像完整清晰地記錄待測工程巖面信息,便于下一步區域巖體建模得到蘊含完整節理信息的巖體三維模型;②如圖4(b)所示,應在待拍攝工程巖面上預先選定坐標控制區域,在該區域預先布置3個控制點;控制點1、2、3分別以“叉”、“點”、“圈叉”來進行標記區分,相互間距盡量控制在1~2 m以內,現場通過RTK與免棱鏡激光全站儀等測量設備獲取3個控制點的(X、Y、Z)空間坐標信息以完成對工程巖面的空間坐標定位;根據3點確定1個空間平面的原理獲取待測工程巖面的尺寸、傾角等信息,便于后期模型的三維坐標真實化。

系統采用大疆御2無人機作為航拍攝影平臺。經測試,在開展節理信息采集工作時,拍攝視頻的分辨率達到3 840×2 160(4 K)、幀率采用60FPS、無人機飛行速度控制在1 m/s左右時,拍攝的工程巖面視頻效果較好,圖像上的巖體節理特征及分布狀態清晰可見,后期可實現良好的巖體三維建模效果。
2.2 基于航拍視頻的節理巖體模型虛擬重構
如圖5所示,將無人機航拍生成的MP4格式視頻文件導入3DF圖像三維建模軟件中,利用圖像建模技術構建區域巖體三維模型。其主要工作步驟如下:

(1)視頻分割為圖像集。將現場無人機航拍視頻導入3DF軟件中,通過人工修改FPS提取參數將航拍視頻分割為數量不等的圖片集。其中FPS提取參數設置越大,分割的圖片集數量就越多,越能為后續模型重構提供更多的圖片樣本,達到更好的建模效果,但相對應的模型重構所需時間也就越長,對于計算機GPU處理能力的要求也就越高。經測試,一般將FPS提取參數設置為2,分割的圖片集數量即可滿足后期的圖像建模要求。
(2)圖像識別和自動拼接。3DF軟件可從多幅二維圖像中計算所需重構模型的三維特征點,并以三維特征點為基礎,以導入的原始視頻數據為參考,自動進行圖像拼接與拍攝場景的三維模型重構,最終生成測點區域的3D模型。
(3)模型坐標真實化。在3DF軟件內輸入現場布設的控制點坐標,對生成的巖體表面3D模型進行坐標真實化,使模型尺寸和空間分布狀況(模型的空間傾向、走向)與真實的工程巖體環境相對應,為進一步進行巖體結構信息繪制與統計分析提供基礎模型數據。
重構完成的節理巖體三維模型應滿足如下幾點要求,方可進行下一步巖體節理裂隙信息的提取與統計。
(1)導入控制點坐標信息后的巖面模型不應出現明顯的模型區域錯位、反轉等現象,應保持與現場工程巖面一致的空間分布形態。
(2)生成的三維模型上的節理特征及分布信息應清晰可見,盡量保持模型整體的完整性,即模型上不應出現明顯的漏洞、破損等錯誤區域。
(3)工程巖面模型構建后,應正常導出標準PLY格式的三維mesh模型與三維點云數據模型,便于后期節理裂隙信息提取與統計。
2.3 巖體節理裂隙信息提取與統計
利用Sirovision圖像處理系統進行巖體節理信息提取。如圖6所示,在已生成的測點3D模型表面,采用人工識別方法進行巖體結構繪制,系統具體操作流程可參考文獻[19-20]所提出的基于Sirovision的節理巖體調查方法。最終得到包括各個節理面的中心點坐標信息(X、Y、Z坐標)、節理傾角信息(Dip)、節理傾向信息(Dip Direction)、跡線長度信息(Persistence)等節理產狀與分布信息。

2.4 系統精度驗證
基于上述分析可知,該節理信息提取系統的精度誤差主要存在于:①重構所得區域巖體三維模型自身精度;②在三維模型上提取巖體節理裂隙信息的精度。兩者共同決定該系統對巖體結構面信息的提取效果。
為驗證系統重構得到的三維模型精度,采用如圖7(圖中坐標點“×—·”、“·—?”、“?—×”之間的距離為“b”、“c”、“a”,坐標點“×”、“·”、“?”對應的夾角為“ α”、“β”、“γ”)所示方法統計3組三維模型上各控制點間的距離、夾角參數,通過與現場利用羅盤、卡尺等工具獲得的實測參數進行對比,驗證系統所建工程巖面三維模型的精度與可靠性,數據對比結果如表1所示。
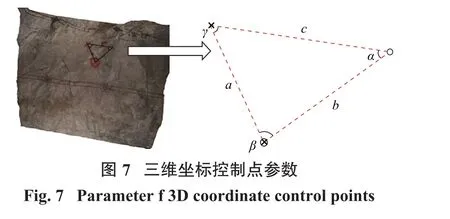

由表1可知:系統測得模型坐標點距離、夾角等參數與現場實際測量值十分接近,說明系統所建模型與實際工程巖面之間有一致的空間信息,可用來進行下一步的結構面信息提取工作。
為驗證系統在三維模型上提取的巖體節理裂隙信息的可靠性,分別對同一工程巖面上選定的3組優勢結構面的產狀信息進行現場勘察測量和三維模型結構面信息提取。兩者對比結果見表2。
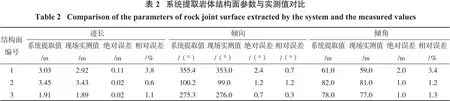
由表2可知:系統提取所得結構面參數值與現場采用羅盤等設備獲得的實際量測值十分接近,驗證了本系統提取的結構面信息數據的有效性。
3 工程應用
鏡鐵山鐵礦黑溝礦區礦體形態簡單、厚度較大,采用露天方式進行開采。礦區地質構造為向斜構造,屬次級褶皺,并為數條斷層所切割,巖層經受區域變質作用普遍發生劈裂,節理較發育。為保障礦區安全生產、分析邊坡穩定狀態,掌握礦區真實的巖體結構信息,開展了黑溝礦區工程巖體節理裂隙調查工作。
本研究以礦區北翼3 760 m水平局部邊坡為例進行節理裂隙調查。該區域邊坡高度15 m,調查區域空間跨度達71 m。采用大疆御2多旋翼無人機,拍攝視頻的分辨率達到4 K(3 840×2 160),幀率采用60 FPS,將無人機的飛行速度控制在1 m/s左右,按照預先規劃的無人機視頻采集路線對該區域進行航拍得到視頻圖像。總計耗時2 min,即可完成對當前區域的視頻數據采集工作。
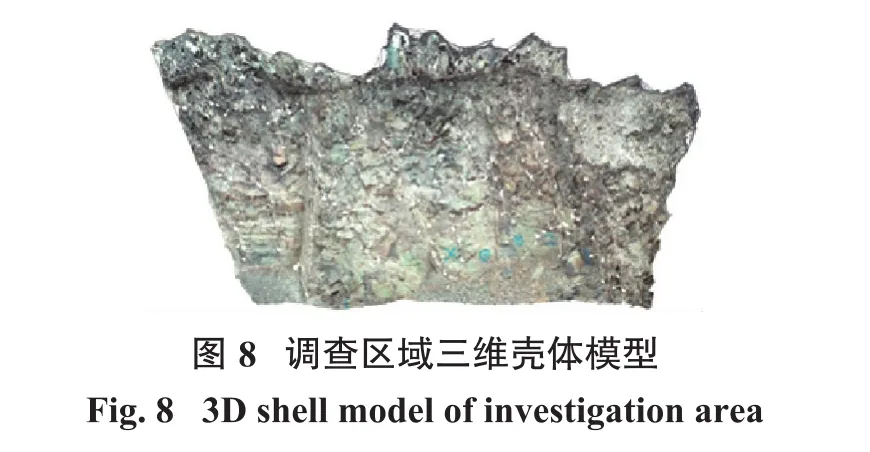
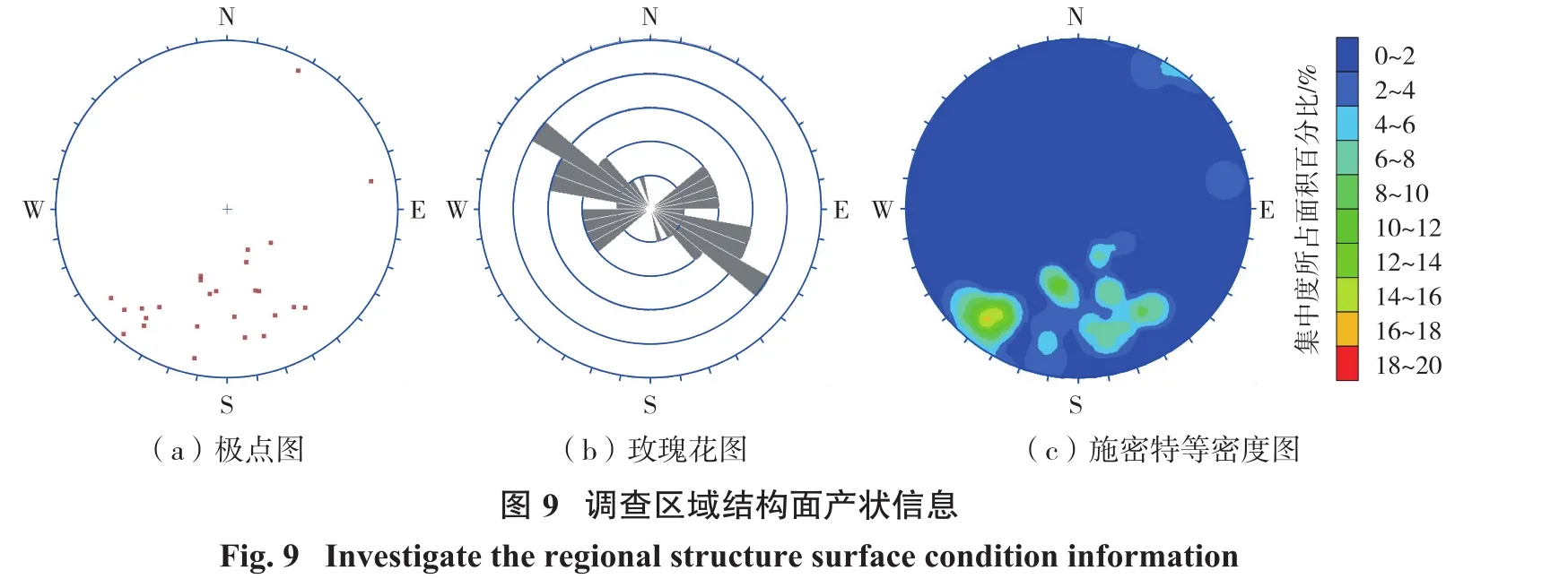
按照如圖3所示的節理裂隙信息提取流程,將拍攝的原始視頻數據重構得到如圖8所示的該區域三維殼體模型。在該模型基礎上繪制120處結構面,總結上述結構面產狀信息,得到如圖9所示的巖體節理產狀分布極點圖(圖9(a))、玫瑰花圖(圖9(b))以及等密度圖(圖9(c))。根據數據聚類結果可知,在該區域范圍內存在2組主節理(優勢節理)和1組隨機節理方向。其中第1組優勢節理產狀為傾角66.1°、傾向159.9°,第2組優勢節理產狀為傾角40.1°、傾向178.6°。該區域的三維模型重構與節理信息提取工作共用時1 h,經后期現場勘察驗證,所得到的節理信息提取結果符合該區域節理分布的實際情況,滿足節理信息采集工作需要。
4 結 論
(1)提出了通過無人機航拍采集現場節理巖體的視頻數據,利用3DF軟件進行節理巖體模型三維重構,基于Sirovision軟件開展巖體節理信息提取與統計分析的巖體節理信息提取方法。該方法可以快速且有效地提取局部巖體節理裂隙信息,降低工人勞動強度,在保障測量人員安全的同時,提高節理調查工作的推廣覆蓋范圍和精細化程度。
(2)無人機航拍開展現場節理信息采集時,控制無人機以1 m/s的飛行速度勻速飛行,按照預先規劃的航拍路線進行拍攝。拍攝視頻的分辨率達到4 K(3 840×2 160)、幀率采用60 FPS時,獲得的區域巖體視頻圖像可以精確構建大范圍、高精度的巖體三維模型,有效支持節理信息提取工作。
(3)黑溝礦區露天邊坡節理裂隙調查結果反映出本研究提出的節理裂隙信息提取方法合理有效,可實現露天邊坡節理信息的精細調查。但受光照和飛行安全限制,地下空間等狹窄復雜空間環境下的巖體節理信息采集效果有待驗證。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
中華手工(2017年2期)2017-06-06 23:00:31
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
現代企業(2015年9期)2015-02-28 18:56:50
中外會展(2014年4期)2014-11-27 07:46:46