一種基于目標(biāo)點(diǎn)跡關(guān)聯(lián)的艦載多雷達(dá)數(shù)據(jù)融合系統(tǒng)
2021-10-15 07:25:42陳敬軍
雷達(dá)與對抗 2021年3期
陳敬軍
(海軍駐上海地區(qū)第七軍事代表室,上海 201108)
0 引 言
為了適應(yīng)現(xiàn)代信息技術(shù)和戰(zhàn)爭形態(tài)的發(fā)展,近二十年來,多傳感器信息融合技術(shù)發(fā)展迅速[1-10]。數(shù)據(jù)融合是為了充分利用不同時(shí)間與空間的多傳感器資源,把來自不同平臺傳感器的在空間和時(shí)間上冗余或互補(bǔ)的數(shù)據(jù)信息依據(jù)某種準(zhǔn)則進(jìn)行組合,以獲得被測對象一致性的描述和理解,使該系統(tǒng)較其各個(gè)子系統(tǒng)具有更加優(yōu)越的性能,從而做出更加準(zhǔn)確、可靠、穩(wěn)定的決策。
現(xiàn)代艦艇都配備了多部雷達(dá),但每部雷達(dá)只能提供一定空間和時(shí)間的目標(biāo)信息,多雷達(dá)數(shù)據(jù)融合將有效提高平臺的目標(biāo)檢測、跟蹤、定位性能和態(tài)勢評估能力[11-16]。受硬件等因素的制約,國內(nèi)多雷達(dá)數(shù)據(jù)融合研究和應(yīng)用重點(diǎn)是航跡級融合技術(shù),而點(diǎn)跡和信號級融合技術(shù)研究得相對較少。在公共計(jì)算平臺加速推進(jìn)的大背景下,本文給出了一種工程化的新型艦載多雷達(dá)點(diǎn)跡融合系統(tǒng)方案,簡單介紹了點(diǎn)跡融合技術(shù)的實(shí)現(xiàn)方法,并對提出的多雷達(dá)點(diǎn)跡融合系統(tǒng)的性能進(jìn)行了討論。
1 總體方案
1.1 點(diǎn)跡級融合優(yōu)勢
多雷達(dá)數(shù)據(jù)融合可以選擇對信號、點(diǎn)跡和航跡三個(gè)層次的數(shù)據(jù)進(jìn)行融合:信號級融合處理雷達(dá)的回波信號;點(diǎn)跡級融合處理各個(gè)雷達(dá)經(jīng)目標(biāo)檢測處理后得到的點(diǎn)跡信息;航跡級融合處理各個(gè)雷達(dá)經(jīng)檢測跟蹤處理后得到的航跡信息[9]。
信息提取過程往往會損失部分原始信號信息,通常每經(jīng)歷一次信息提取就會損失一部分原始信號信息。信號級融合的層次最低,因?yàn)樾畔⑻崛淼男畔p失最少,能夠最大限度地利用原始信息,可實(shí)現(xiàn)檢測、成像等更多樣的融合處理,但是時(shí)空配準(zhǔn)要求高,通信與信息處理代價(jià)最大,實(shí)現(xiàn)復(fù)雜度最高。航跡級融合的層次最高,但各雷達(dá)在形成目標(biāo)航跡的處理過程中已經(jīng)丟失了大量的原始信息,通過航跡融合大幅提高系統(tǒng)性能會有一定的限制,但是融合處理實(shí)現(xiàn)最簡單,只需要各雷達(dá)輸出目標(biāo)航跡等數(shù)據(jù)即可,通信和信息處理的代價(jià)最小,基本上無需改動現(xiàn)有的雷達(dá)硬件。
點(diǎn)跡級融合的層次居中,付出的代價(jià)不大,但能明顯提升系統(tǒng)的性能。點(diǎn)跡融合的點(diǎn)跡信息量非常豐富,目標(biāo)點(diǎn)跡是各雷達(dá)目標(biāo)檢測的結(jié)果,卻是目標(biāo)跟蹤、軌跡提取等后續(xù)處理的輸入[1]。在點(diǎn)跡級融合,除了無法形成原始圖像外,系統(tǒng)不僅可以充分利用各雷達(dá)點(diǎn)跡包含的豐富信息來提高目標(biāo)檢測概率、定位精度和空間覆蓋能力,而且可從多個(gè)方面提高目標(biāo)跟蹤性能。通過對多雷達(dá)點(diǎn)跡串行處理,目標(biāo)點(diǎn)跡更新速率加快,從而大大提高航跡起始速度和對機(jī)動目標(biāo)的跟蹤能力。在點(diǎn)跡級融合不需要傳輸各雷達(dá)之間的海量原始數(shù)據(jù),數(shù)據(jù)通信量少,實(shí)時(shí)性要求相對較低;同時(shí)可以支持各雷達(dá)單元獨(dú)立并行處理,在不影響現(xiàn)有多雷達(dá)系統(tǒng)主要架構(gòu)的情況下完成點(diǎn)跡信息的融合,具有在系統(tǒng)改動較小的情況下充分利用點(diǎn)跡信息融合大幅提高系統(tǒng)性能的潛力。在大力推行艦船網(wǎng)絡(luò)一體化和公共計(jì)算平臺的背景下,在點(diǎn)跡級進(jìn)行多雷達(dá)數(shù)據(jù)融合是可行的理想選擇。
1.2 系統(tǒng)總體方案
圖1給出了艦載平臺的多雷達(dá)點(diǎn)跡融合系統(tǒng)的信號流程:系統(tǒng)首先對接收到的各個(gè)雷達(dá)的點(diǎn)跡數(shù)據(jù)進(jìn)行空間配準(zhǔn),統(tǒng)一測量坐標(biāo)系。如果雷達(dá)數(shù)據(jù)包含目標(biāo)多普勒速度,則利用外推法進(jìn)行時(shí)間配準(zhǔn),接著將時(shí)空配準(zhǔn)后的點(diǎn)跡數(shù)據(jù)進(jìn)行目標(biāo)點(diǎn)跡融合,然后利用融合后的目標(biāo)點(diǎn)跡進(jìn)行航跡起始、航跡關(guān)聯(lián)、航跡濾波更新,并輸出最終航跡跟蹤結(jié)果。如果雷達(dá)數(shù)據(jù)不包含目標(biāo)多普勒速度,則根據(jù)多雷達(dá)測量值的時(shí)標(biāo)進(jìn)行排序,依次利用多雷達(dá)測量值進(jìn)行航跡起始、航跡關(guān)聯(lián)、航跡濾波更新,并輸出最終航跡跟蹤結(jié)果。

圖1 整體實(shí)現(xiàn)方案
2 系統(tǒng)實(shí)現(xiàn)
2.1 空間配準(zhǔn)


(1)
(2)

(3)
易得直角坐標(biāo)系下的多普勒分量為
(4)

2.2 時(shí)間配準(zhǔn)
時(shí)間配準(zhǔn)是將多部雷達(dá)的時(shí)間對準(zhǔn)到一個(gè)時(shí)間基準(zhǔn)上[1]。時(shí)間基準(zhǔn)的選擇可以根據(jù)實(shí)際情況確定,但通常以融合中心的時(shí)間作為時(shí)間基準(zhǔn)。時(shí)間配準(zhǔn)方法有多項(xiàng)式插值法、外推法等。
多項(xiàng)式插值法的基本原理是利用有限的點(diǎn)跡數(shù)據(jù)對目標(biāo)短時(shí)間內(nèi)的運(yùn)動軌跡進(jìn)行逼近:先將目標(biāo)多個(gè)時(shí)刻的數(shù)據(jù)擬合得到一條曲線,然后計(jì)算出曲線上時(shí)間基準(zhǔn)對應(yīng)的點(diǎn)上的數(shù)值。多項(xiàng)式插值法需要多幀點(diǎn)跡的數(shù)據(jù)關(guān)聯(lián),相當(dāng)于點(diǎn)跡時(shí)間配準(zhǔn)前進(jìn)行航跡起始的處理,使得時(shí)間配準(zhǔn)復(fù)雜度相對較高,并且時(shí)間配準(zhǔn)具有一定的滯后性。為了避免時(shí)間滯后和航跡起始問題,系統(tǒng)只對有多普勒速度的點(diǎn)跡數(shù)據(jù)利用外推法進(jìn)行時(shí)間配準(zhǔn)。
外推法是一種簡單易操作的時(shí)間配準(zhǔn)技術(shù)。以兩部雷達(dá)為例,設(shè)雷達(dá)1、2的采樣周期分別為T1、T2,融合中心的處理周期為T(T可以選T1或T2),則外推法的處理步驟如下:
(1)在當(dāng)前融合中心處理時(shí)刻t,取所有未處理的雷達(dá)1、2的空間配準(zhǔn)后的點(diǎn)跡;
(2)將所有未處理的雷達(dá)1、2的點(diǎn)跡外推,得到當(dāng)前融合中心處理時(shí)刻的時(shí)間配準(zhǔn)點(diǎn)跡。

(5)

(6)
由此得到點(diǎn)跡t時(shí)刻的坐標(biāo)為[x,y]。
需要注意的是,由于一般只能得到點(diǎn)跡的多普勒速度信息,即以測量雷達(dá)為坐標(biāo)原點(diǎn)的徑向速度信息,無法得到準(zhǔn)確的速度信息,上述外推法只能得到目標(biāo)的徑向位移,目標(biāo)的角度假設(shè)不變。在對準(zhǔn)時(shí)利用多普勒信息估計(jì)目標(biāo)的運(yùn)動速度,由于多普勒速度存在模糊,利用多假設(shè)方法進(jìn)行配對,再根據(jù)匹配結(jié)果進(jìn)行外推。
2.3 關(guān)聯(lián)算法
關(guān)聯(lián)算法包含不同雷達(dá)點(diǎn)跡之間的關(guān)聯(lián)和融合后點(diǎn)跡與航跡的關(guān)聯(lián)兩部分。
不同雷達(dá)點(diǎn)跡之間的關(guān)聯(lián)用于判斷同一時(shí)刻多雷達(dá)的點(diǎn)跡是否屬于同一目標(biāo),主要利用目標(biāo)點(diǎn)跡之間的位置關(guān)系。不同雷達(dá)所觀測的同一目標(biāo)的點(diǎn)跡都分布在目標(biāo)真值附近,相距較近。不同雷達(dá)的作用距離和定位精度是不同的,即使是同一雷達(dá)在不同距離上的定位精度也是不同的。在多雷達(dá)點(diǎn)跡關(guān)聯(lián)過程中要考慮各雷達(dá)的監(jiān)控區(qū)域、定位精度和作用距離以及點(diǎn)跡的空間位置等因素。雷達(dá)性能已知的情況下,可以把定位精度高的雷達(dá)點(diǎn)跡優(yōu)先假設(shè)為目標(biāo)點(diǎn)跡,然后利用數(shù)據(jù)關(guān)聯(lián)方法將其他點(diǎn)跡與目標(biāo)點(diǎn)跡互聯(lián),直至所有點(diǎn)跡關(guān)聯(lián)完畢。考慮能夠得到實(shí)時(shí)互聯(lián)結(jié)果,同一目標(biāo)對應(yīng)的多雷達(dá)點(diǎn)跡數(shù)據(jù)互聯(lián)方法可選用最近鄰方法和全局最近鄰方法。
融合后點(diǎn)跡與航跡的關(guān)聯(lián)采用聯(lián)合概率數(shù)據(jù)互聯(lián)算法(JPDA),根據(jù)不同雷達(dá)的測量協(xié)方差矩陣,采用橢圓關(guān)聯(lián)波門,并按照卡方分布概率密度函數(shù)以及設(shè)定的概率門限進(jìn)行設(shè)置。
2.4 點(diǎn)跡融合
將多雷達(dá)的目標(biāo)點(diǎn)跡與目標(biāo)關(guān)聯(lián)以后,后續(xù)目標(biāo)跟蹤方法可以分為兩大類:一類將同一目標(biāo)的多雷達(dá)點(diǎn)跡數(shù)據(jù)進(jìn)行合并壓縮和/或串行處理,然后利用單雷達(dá)目標(biāo)數(shù)據(jù)關(guān)聯(lián)算法進(jìn)行處理[13];另一類利用在單傳感器數(shù)據(jù)關(guān)聯(lián)算法基礎(chǔ)上發(fā)展出來的多傳感器聯(lián)合概率數(shù)據(jù)互聯(lián)算法(MSJPDA)等,直接處理同一目標(biāo)的多雷達(dá)點(diǎn)跡數(shù)據(jù)。

(7)
2.5 航跡起始和刪除
利用點(diǎn)跡與點(diǎn)跡的互聯(lián)實(shí)現(xiàn)航跡起始。常用的航跡起始方法有直觀法和邏輯法等[1],其中直觀法是最簡單的航跡起始方式,只利用速度限制和加速度限制來起始航跡;邏輯法不僅利用速度信息起始航跡,而且利用航跡和點(diǎn)跡的誤差信息進(jìn)一步確定起始航跡。邏輯法步驟如下:
(1)用第一次掃描得到的點(diǎn)跡作為航跡根節(jié)點(diǎn),并通過目標(biāo)可能的速度等建立相關(guān)波門,對落入初始相關(guān)波門內(nèi)的第二次掃描點(diǎn),均建立可能航跡;
(2)對每個(gè)可能的航跡進(jìn)行外推,以外推點(diǎn)為中心,根據(jù)航跡外推誤差協(xié)方差矩陣建立相關(guān)波門,波門內(nèi)與外推點(diǎn)距離最近的第三次掃描點(diǎn)跡作為該航跡關(guān)聯(lián)點(diǎn)跡;
(3)繼續(xù)步驟2,掃描n次后判斷是否形成了穩(wěn)定航跡,若穩(wěn)定航跡存在,則繼續(xù)跟蹤。對不滿足穩(wěn)定航跡邏輯的航跡,做刪除處理。
判斷穩(wěn)定航跡一般采用m/n邏輯方法,在連續(xù)n次掃描中超過m次存在點(diǎn)跡時(shí),便宣告航跡起始成功。
3 系統(tǒng)性能分析
首先利用仿真數(shù)據(jù)驗(yàn)證通過多雷達(dá)點(diǎn)跡融合后系統(tǒng)能否提升目標(biāo)跟蹤精度。以性能相同的兩部雷達(dá)點(diǎn)跡為例,雷達(dá)的脈沖重復(fù)間隔為1 010 μs,每一圈發(fā)射脈沖2 400個(gè),測距誤差為75 m,測量角度誤差為0.4,雷達(dá)系統(tǒng)的檢測概率為0.85,系統(tǒng)采用壓縮合并方法進(jìn)行目標(biāo)點(diǎn)跡融合,采用JPDA算法進(jìn)行跟蹤。目標(biāo)以速度[-100,-100] m/s做勻速直線運(yùn)動,初始位置[63,63] km。圖2~圖5給出了各雷達(dá)以及點(diǎn)跡融合后的一次目標(biāo)跟蹤全程距離、角度、航速和航向的變化情況,全程雷達(dá)掃描120圈,每圈約為2.4 s。表1給出了進(jìn)行1 000次蒙特卡洛仿真得到的各雷達(dá)誤差統(tǒng)計(jì)結(jié)果,可以看出該點(diǎn)跡融合系統(tǒng)能夠有效提高跟蹤精度。
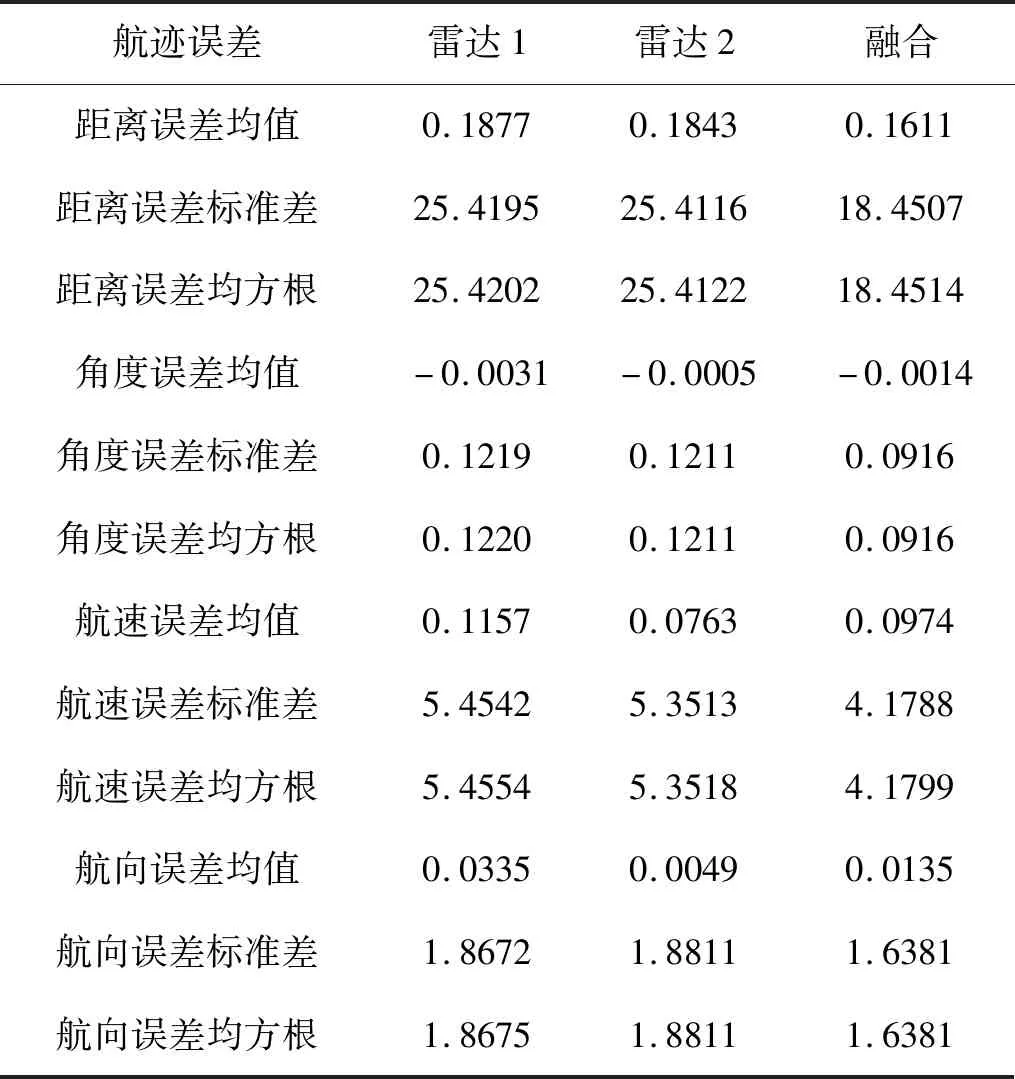
表1 航跡誤差統(tǒng)計(jì)結(jié)果
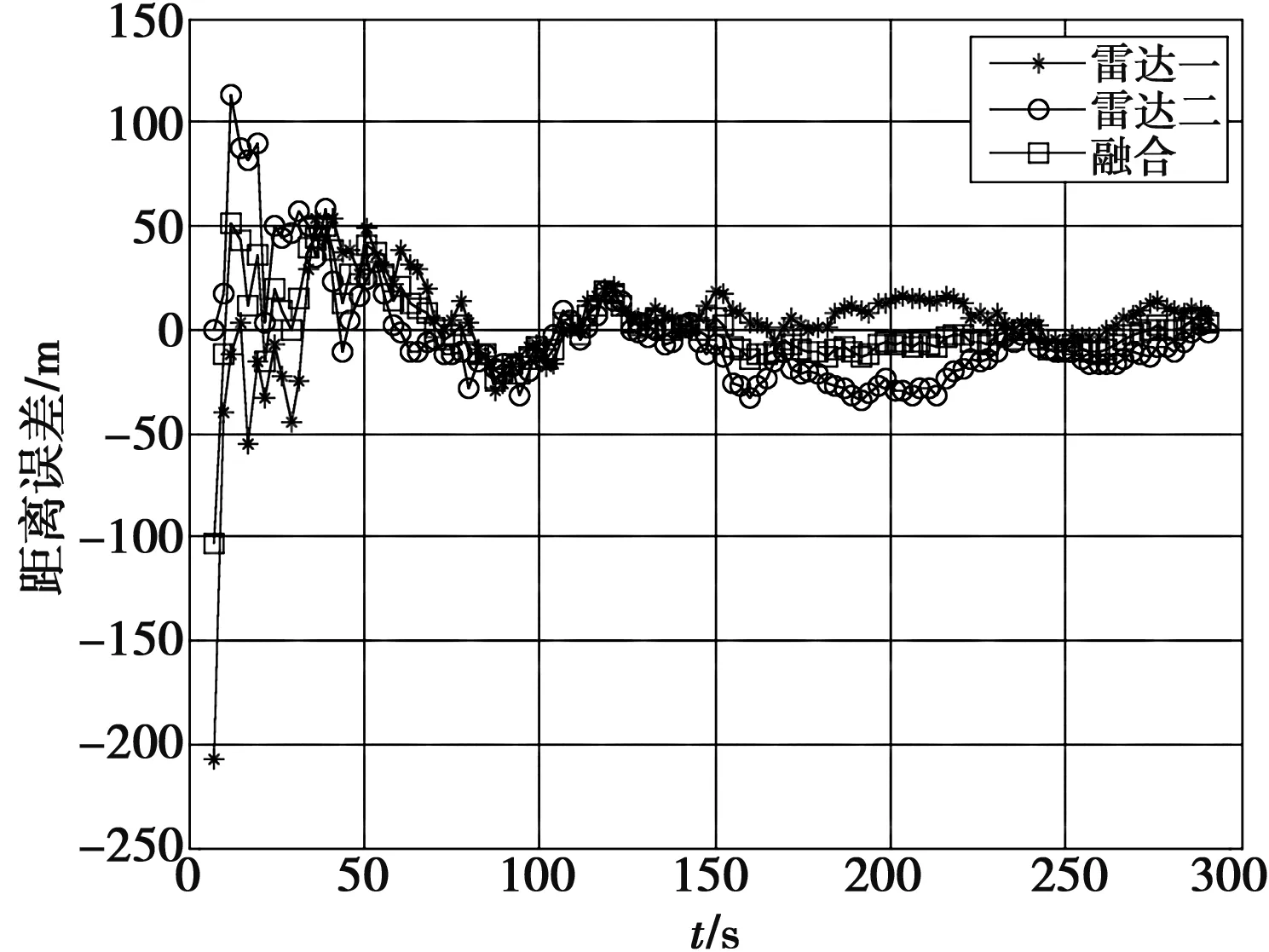
圖2 全程段距離誤差
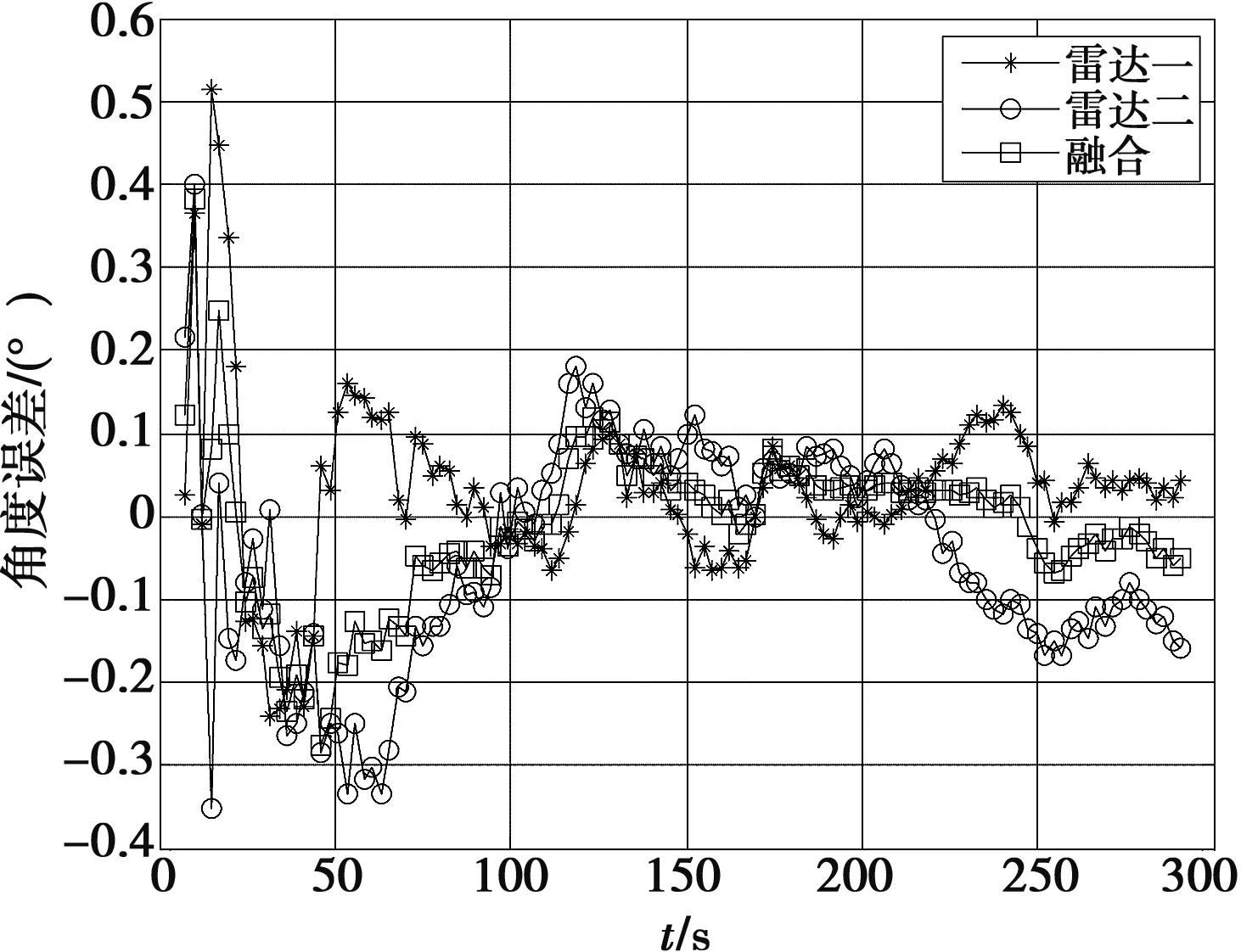
圖3 全程段角度誤差
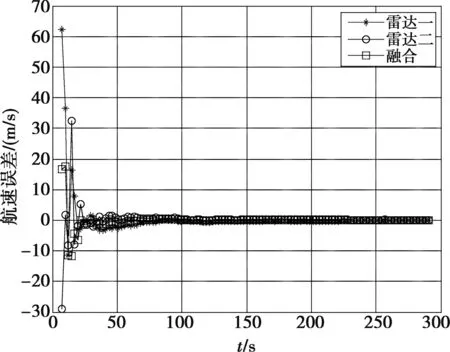
圖4 全程段航速誤差
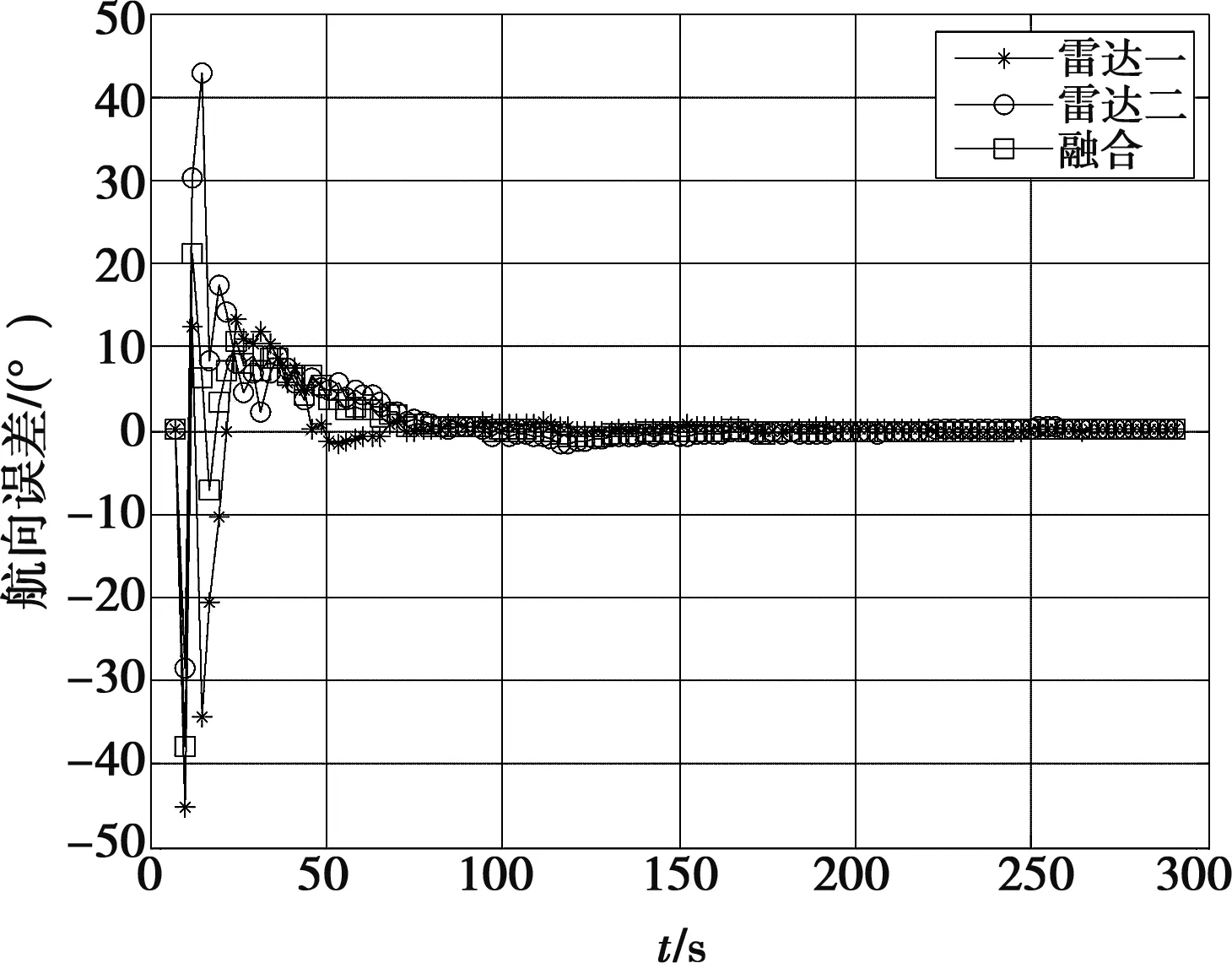
圖5 全程段航向誤差
多雷達(dá)點(diǎn)跡合并壓縮通過改善點(diǎn)跡質(zhì)量提高了目標(biāo)的跟蹤定位精度。通過串行處理后,兩部相同的雷達(dá)的點(diǎn)跡合成后數(shù)據(jù)率可以提高一倍,兩次目標(biāo)檢測的時(shí)間縮短一半,對應(yīng)的目標(biāo)機(jī)動距離同樣會大幅減小,若利用與單部雷達(dá)相同的目標(biāo)跟蹤參數(shù),確認(rèn)航跡起始的時(shí)間會縮短一半,并可跟蹤到機(jī)動性能更大的目標(biāo)。多雷達(dá)點(diǎn)跡串行處理可以加快航跡起始和提高跟蹤機(jī)動目標(biāo)的性能。
由于桅桿遮擋等原因,單部雷達(dá)可能存在一定范圍的盲區(qū)。為了解決盲區(qū)問題,大型艦艇都裝備兩部以上的導(dǎo)航雷達(dá)。根據(jù)本文提出的點(diǎn)跡融合方案,導(dǎo)航雷達(dá)采用無目標(biāo)多普勒速度情況下的處理流程。由于多部導(dǎo)航雷達(dá)的采樣周期基本相同且采樣周期較短,加上導(dǎo)航雷達(dá)感興趣的目標(biāo)機(jī)動性小等,因采樣時(shí)間差異引入的誤差很小,導(dǎo)航雷達(dá)通過點(diǎn)跡融合可以提高目標(biāo)跟蹤精度。對導(dǎo)航雷達(dá)系統(tǒng)而言,通過只對目標(biāo)兩個(gè)以上的點(diǎn)跡合并處理,只要有一部雷達(dá)檢測到目標(biāo),就有目標(biāo)對應(yīng)的點(diǎn)跡送入到后續(xù)目標(biāo)檢測跟蹤處理,融合后的系統(tǒng)與單部雷達(dá)相比擴(kuò)大了觀測范圍,可檢測到位于其中一部雷達(dá)盲區(qū)內(nèi)的目標(biāo)。
當(dāng)兩部雷達(dá)的采樣周期不同,且雷達(dá)和目標(biāo)之間的相對運(yùn)動較快時(shí),時(shí)間配準(zhǔn)過程對融合結(jié)果會產(chǎn)生較大的影響。由于外推法只利用了一個(gè)點(diǎn)跡位置和多普勒速度信息,外推法進(jìn)行時(shí)間對準(zhǔn)所得點(diǎn)跡的誤差比較大。相對于多項(xiàng)式插值法,由于使用的信息較少,外推法的誤差也較大。為了降低時(shí)間配準(zhǔn)誤差,可考慮航跡確認(rèn)前采用本文給出的處理流程,采用如下方法在目標(biāo)航跡輸出后計(jì)算新點(diǎn)跡時(shí)間對準(zhǔn)的位置:一是用估計(jì)的目標(biāo)運(yùn)動參數(shù)代替目標(biāo)多普勒速度,利用外推法進(jìn)行計(jì)算;二是利用屬于同一目標(biāo)航跡上的最近雷達(dá)檢測到的三個(gè)點(diǎn)跡的位置數(shù)據(jù),再用多項(xiàng)式插值法進(jìn)行計(jì)算。
4 結(jié)束語
本文給出了一種艦載多雷達(dá)點(diǎn)跡融合系統(tǒng)的實(shí)現(xiàn)方案,并結(jié)合雙導(dǎo)航雷達(dá)點(diǎn)跡融合的具體情況對系統(tǒng)的性能進(jìn)行了討論。分析結(jié)果表明該多雷達(dá)點(diǎn)跡融合處理系統(tǒng)能顯著提高目標(biāo)的跟蹤精度,數(shù)據(jù)融合后的目標(biāo)跟蹤性能優(yōu)于單部雷達(dá)設(shè)備的跟蹤性能。該融合系統(tǒng)的框架可以支持各雷達(dá)單元的獨(dú)立并行處理,在不影響現(xiàn)有多雷達(dá)系統(tǒng)主要架構(gòu)的情況下完成點(diǎn)跡信息融合,具有在系統(tǒng)改動較小情況下充分利用點(diǎn)跡信息融合大幅提高系統(tǒng)性能的潛力。在加速推進(jìn)公共計(jì)算平臺的大背景下,點(diǎn)跡級多雷達(dá)數(shù)據(jù)融合是一種非常可行的工程方案。但是多雷達(dá)點(diǎn)跡融合處理目前存在較大的技術(shù)難點(diǎn)和一定的技術(shù)風(fēng)險(xiǎn),在后續(xù)工作中還需要根據(jù)雷達(dá)的實(shí)際情況和跟蹤精度要求,不斷優(yōu)化系統(tǒng)設(shè)計(jì)和實(shí)現(xiàn),持續(xù)提高目標(biāo)跟蹤性能。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
中華手工(2017年2期)2017-06-06 23:00:31
讀者(2017年5期)2017-02-15 18:04:18
中外會展(2014年4期)2014-11-27 07:46:46
當(dāng)代修辭學(xué)(2011年2期)2011-01-23 06:39:12