基于雙參考系的感應(yīng)電機(jī)模型預(yù)測(cè)轉(zhuǎn)矩控制
2021-10-11 08:24:16楊鵬廖曉群江元張勇紅侯應(yīng)龍
電氣傳動(dòng) 2021年19期
楊鵬,廖曉群,江元,張勇紅,侯應(yīng)龍
(1.國網(wǎng)甘肅省電力公司,甘肅蘭州730050;
2.西安科技大學(xué)通信與信息工程學(xué)院,陜西西安710054)
電力驅(qū)動(dòng)系統(tǒng)的有限集模型預(yù)測(cè)控制以其概念直觀、結(jié)構(gòu)簡單、易于處理非線性約束以及動(dòng)態(tài)響應(yīng)快等優(yōu)點(diǎn),近年來得到了學(xué)者們的廣泛關(guān)注[1-3]。針對(duì)感應(yīng)電機(jī)驅(qū)動(dòng)系統(tǒng),有限集模型預(yù)測(cè)控制可分為模型預(yù)測(cè)電流控制(model predic?tive current control,MPCC)和模型預(yù)測(cè)轉(zhuǎn)矩控制(model predictive torque control,MPTC)[4-6]。相比于傳統(tǒng)的直接轉(zhuǎn)矩控制(direct torque control,DTC),模型預(yù)測(cè)轉(zhuǎn)矩控制具有較快的電磁轉(zhuǎn)矩響應(yīng)和較小的電磁轉(zhuǎn)矩脈動(dòng)。然而,模型預(yù)測(cè)轉(zhuǎn)矩控制主要有兩個(gè)缺點(diǎn)[7-10]:1)模型預(yù)測(cè)控制依賴于感應(yīng)電機(jī)的參數(shù),而定子電阻隨著溫度的變化而變化,勵(lì)磁電感隨著磁路的飽和而變化。不匹配的電機(jī)參數(shù)將引起預(yù)測(cè)誤差,進(jìn)而引起控制性能的下降,甚至系統(tǒng)失穩(wěn);2)在電磁轉(zhuǎn)矩預(yù)測(cè)模型中含有感應(yīng)電機(jī)的轉(zhuǎn)子速度變量,然而轉(zhuǎn)速的測(cè)量不可避免地引入了噪聲,進(jìn)而降低了電磁轉(zhuǎn)矩的預(yù)測(cè)精度。對(duì)于無速度傳感器的感應(yīng)電機(jī)模型預(yù)測(cè)轉(zhuǎn)矩控制,經(jīng)典的轉(zhuǎn)速估計(jì)多基于自適應(yīng)觀測(cè)器的方法,在該方法中,速度的估計(jì)誤差、定子磁鏈的觀測(cè)誤差以及電磁轉(zhuǎn)矩的預(yù)測(cè)誤差,三者相互耦合相互影響,進(jìn)而降低了感應(yīng)電機(jī)的控制性能。
感應(yīng)電機(jī)的自適應(yīng)觀測(cè)器主要包括龍貝格(Luenberger)觀測(cè)器、卡爾曼濾波器以及滑模觀測(cè)器等[11-14]。在上述三種自適應(yīng)觀測(cè)器中,轉(zhuǎn)速計(jì)算作為自適應(yīng)觀測(cè)器的最后階段,容易受到噪聲影響,帶有估計(jì)誤差的轉(zhuǎn)速反饋至定子磁鏈計(jì)算模塊,又進(jìn)一步惡化了定子磁鏈的觀測(cè)準(zhǔn)確度。文獻(xiàn)[15]在基于電壓模型計(jì)算定子磁鏈?zhǔn)噶康幕A(chǔ)上,提出了一種補(bǔ)償策略,提高了感應(yīng)電機(jī)轉(zhuǎn)速的計(jì)算精度。文獻(xiàn)[16]提出了一種基于滑模理論的定子磁鏈觀測(cè)器,提高了定子磁鏈觀測(cè)器的魯棒性。
針對(duì)基于速度自適應(yīng)觀測(cè)器感應(yīng)電機(jī)驅(qū)動(dòng)系統(tǒng)的缺點(diǎn)以及電磁轉(zhuǎn)矩預(yù)測(cè)模型依賴于轉(zhuǎn)速的問題,本文提出了一種基于雙坐標(biāo)系觀測(cè)器的感應(yīng)電機(jī)無速度傳感器預(yù)測(cè)轉(zhuǎn)矩控制。首先,對(duì)于磁鏈觀測(cè)和轉(zhuǎn)速估計(jì),采樣雙參考系的方法,基于電壓模型的磁鏈計(jì)算表示在定子坐標(biāo)系,基于電流模型的磁鏈計(jì)算表示在轉(zhuǎn)子磁鏈?zhǔn)噶孔鴺?biāo)系。上述雙坐標(biāo)系的表示方法可分離定子磁鏈觀測(cè)和轉(zhuǎn)速估計(jì)的相互影響。其次,在電磁轉(zhuǎn)矩預(yù)測(cè)模型中,采用基于定子磁鏈和轉(zhuǎn)子磁鏈叉乘的數(shù)學(xué)公式,同時(shí)基于轉(zhuǎn)子磁鏈?zhǔn)噶孔鴺?biāo)系表示轉(zhuǎn)子磁鏈,進(jìn)一步簡化了電磁轉(zhuǎn)矩的預(yù)測(cè)方程,提高了感應(yīng)電機(jī)電磁轉(zhuǎn)矩的預(yù)測(cè)精度。最后,提出的雙參考系預(yù)測(cè)轉(zhuǎn)矩控制算法在2.2 kW感應(yīng)電機(jī)實(shí)驗(yàn)平臺(tái)上得到了實(shí)驗(yàn)驗(yàn)證。
1 數(shù)學(xué)模型
在感應(yīng)電機(jī)定子坐標(biāo)系,三相感應(yīng)電機(jī)數(shù)學(xué)模型如下式所示[3]:

式中:Ψs,Ψr分別為定子磁鏈?zhǔn)噶亢娃D(zhuǎn)子磁鏈?zhǔn)噶浚籿s為定子電壓矢量;is,ir分別為定子電流矢量和轉(zhuǎn)子電流矢量;Ls,Lr,Lm分別為定子自感、轉(zhuǎn)子自感、定轉(zhuǎn)子互感;Rs,Rr分別為定子電阻和轉(zhuǎn)子電阻;pn為感應(yīng)電機(jī)的極對(duì)數(shù);ωr為感應(yīng)電機(jī)的轉(zhuǎn)速;Te為感應(yīng)電機(jī)電磁轉(zhuǎn)矩。
感應(yīng)電機(jī)驅(qū)動(dòng)系統(tǒng)如圖1所示,三相感應(yīng)電機(jī)由兩電平電壓源逆變器(voltage source inverter,VSI)供電。兩電平電壓源逆變器包含6個(gè)絕緣柵雙極型晶體管(insulated gate bipolar transis?tor,IGBT)。電壓源逆變器的開關(guān)狀態(tài)矢量S如下式所示:

圖1 感應(yīng)電機(jī)驅(qū)動(dòng)系統(tǒng)Fig.1 Induction motor drive system

其中
Sa=1表示Sa晶體管處于開通狀態(tài),而Sˉa表示其處于關(guān)斷狀態(tài);Sb,Sc同理。
依據(jù)電壓源逆變器的開關(guān)狀態(tài)矢量,定子電壓矢量vs可以表示為

式中:VDC為直流母線電壓。
2 基于新型雙坐標(biāo)系觀測(cè)器的感應(yīng)電機(jī)預(yù)測(cè)轉(zhuǎn)矩控制
2.1 新型雙坐標(biāo)系觀測(cè)器
2.1.1 傳統(tǒng)的自適應(yīng)觀測(cè)器
聯(lián)立感應(yīng)電機(jī)的狀態(tài)方程式(1)~式(4),消去定子電流矢量is和轉(zhuǎn)子電流矢量ir,可得到以定子磁鏈?zhǔn)噶喀穝和轉(zhuǎn)子磁鏈?zhǔn)噶喀穜為狀態(tài)變量的感應(yīng)電機(jī)狀態(tài)方程,如下式所示:
其中
依據(jù)線性控制理論,磁鏈觀測(cè)器可設(shè)計(jì)為
式中:“^”表示觀測(cè)量;K1,K2為觀測(cè)器的校正項(xiàng)增益矩陣。
定子電流觀測(cè)量i?s由下式計(jì)算:

其中

合理設(shè)計(jì)增益矩陣K1,K2可保證磁鏈觀測(cè)器的穩(wěn)定性。依據(jù)線性控制理論的極點(diǎn)配置方法,增益矩陣K1,K2的設(shè)計(jì)可有多種方案。文獻(xiàn)[5]中K1,K2的表達(dá)式如下式所示:

式中:k1r,k1i,k2r,k2i為常數(shù)。
基于線性控制理論及Matlab工具軟件可繪制感應(yīng)電機(jī)和磁鏈觀測(cè)器的根軌跡圖,如圖2所示。從圖中可看出,在高速段,磁鏈觀測(cè)器的極點(diǎn)位于電機(jī)極點(diǎn)左側(cè),而隨著感應(yīng)電機(jī)轉(zhuǎn)速的降低,兩者極點(diǎn)的距離不斷減小,此時(shí)磁鏈觀測(cè)器的動(dòng)態(tài)性能及穩(wěn)態(tài)性能變差。

圖2 感應(yīng)電機(jī)與龍貝格觀測(cè)器的根軌跡圖Fig.2 Root locus of induction motor and observer
由于式(11)和式(13)中都含有感應(yīng)電機(jī)轉(zhuǎn)子速度變量ω?r,而轉(zhuǎn)速的估計(jì)一般采用模型參考自適應(yīng)方法(model reference adaptive system,MRAS),實(shí)際電機(jī)作為參考模型,磁鏈觀測(cè)器作為自適應(yīng)模型。依據(jù)李雅普洛夫穩(wěn)定性理論推導(dǎo)出轉(zhuǎn)速的自適應(yīng)機(jī)制,如下式所示:

從上述推導(dǎo)可知,定子磁鏈和轉(zhuǎn)子磁鏈的估計(jì)依賴于感應(yīng)電機(jī)的轉(zhuǎn)速變量。當(dāng)感應(yīng)電機(jī)的轉(zhuǎn)速動(dòng)態(tài)變化時(shí),轉(zhuǎn)速的估計(jì)與磁鏈的觀測(cè)相互影響,進(jìn)一步降低了兩者的估計(jì)精度。
2.1.2 雙坐標(biāo)觀測(cè)器
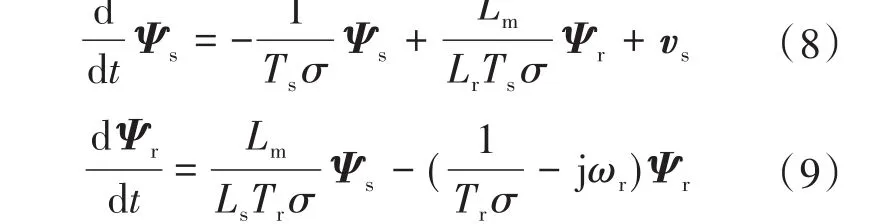
為了消除磁鏈觀測(cè)與轉(zhuǎn)速估計(jì)的相互耦合,在新型雙坐標(biāo)觀測(cè)器中,式(8)仍在定子坐標(biāo)系表示,由于 Ψr=(LrΨ?s-L2σis)/Lm,方程可簡化為dΨs/dt=-Rsis+vs;式(9)由定子坐標(biāo)系變換到轉(zhuǎn)子磁鏈?zhǔn)噶孔鴺?biāo)系,如下式:
其中
式中:ωΨr為轉(zhuǎn)子磁鏈?zhǔn)噶康男D(zhuǎn)速度;為轉(zhuǎn)子磁鏈?zhǔn)噶康淖儞Q公式;?為轉(zhuǎn)子磁鏈?zhǔn)噶拷牵黄溆酄顟B(tài)變量的變換公式與類同。依據(jù)磁場(chǎng)定向的基本原理,在轉(zhuǎn)子磁鏈?zhǔn)噶孔鴺?biāo)系中,轉(zhuǎn)子磁鏈?zhǔn)噶刻摬繛榱悖?0,那么;因此,式(15)的實(shí)部不含有ωΨr和ωr,式(15)可進(jìn)一步簡化為

為提高磁鏈觀測(cè)的魯棒性,新型雙坐標(biāo)觀測(cè)器引入滑模理論,基于滑模切換函數(shù)作為校正項(xiàng),因此雙坐標(biāo)系觀測(cè)器方程如下式所示:


其中,voff為定子磁鏈模型的補(bǔ)償項(xiàng),設(shè)計(jì)如下式所示:

其中,r為電壓源逆變器的開關(guān)電阻;vΨ為定子磁鏈誤差的補(bǔ)償項(xiàng),vΨ的計(jì)算如下式所示:

其中

式中:KpRs,KiRs為比例積分系數(shù)。
定子磁鏈模型補(bǔ)償項(xiàng)框圖如圖3所示。從上述方程中可以看出,式(17)、式(18)中不含轉(zhuǎn)速信息,消除了轉(zhuǎn)速估計(jì)與磁鏈觀測(cè)的相互影響。依據(jù)感應(yīng)電機(jī)轉(zhuǎn)子轉(zhuǎn)速、轉(zhuǎn)子磁場(chǎng)轉(zhuǎn)速、滑差轉(zhuǎn)速三者之間的關(guān)系,轉(zhuǎn)子轉(zhuǎn)速可由定子磁鏈和轉(zhuǎn)子磁鏈直接計(jì)算得到,如下式所示:

圖3 補(bǔ)償電壓計(jì)算框圖Fig.3 Calculation block diagram of compensation voltage

通過式(21)直接計(jì)算轉(zhuǎn)速,提高了轉(zhuǎn)速估計(jì)的動(dòng)態(tài)響應(yīng)。
在觀測(cè)器方程式(17)、式(18)和轉(zhuǎn)速計(jì)算方程式(21)中,含有定子電阻Rs和轉(zhuǎn)子電阻Rr。定、轉(zhuǎn)子電阻隨溫度的改變而變化,影響磁鏈與轉(zhuǎn)速的估計(jì)精度。在此,假定定子電阻和轉(zhuǎn)子電阻的變化率相同,定、轉(zhuǎn)子電阻的估計(jì)方程如下式所示:

式中:krr為調(diào)整定轉(zhuǎn)子電阻比率的常系數(shù);KRs為電阻估計(jì)的積分系數(shù);irs,i?rs為定子電流的采樣值和估計(jì)值。
本文提出的新型雙坐標(biāo)系觀測(cè)器框圖如圖4所示。
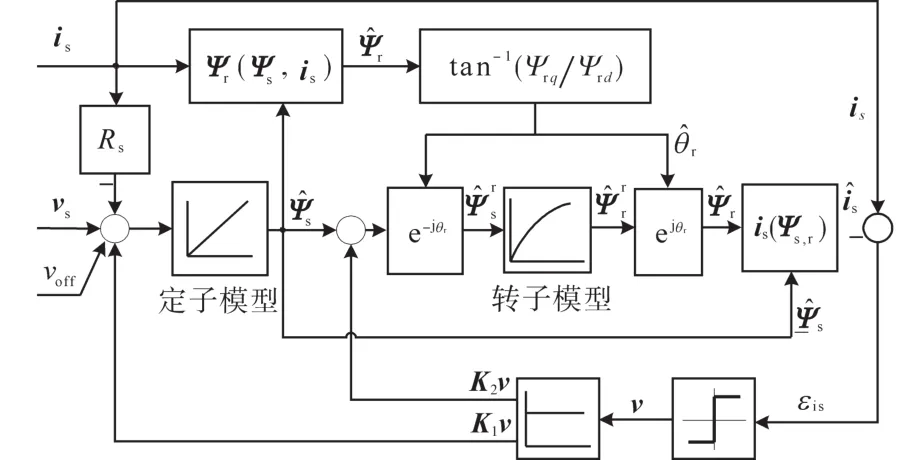
圖4 新型雙坐標(biāo)系觀測(cè)器Fig.4 Novel dual reference frame observer
2.2 新型雙坐標(biāo)系轉(zhuǎn)矩預(yù)測(cè)模型
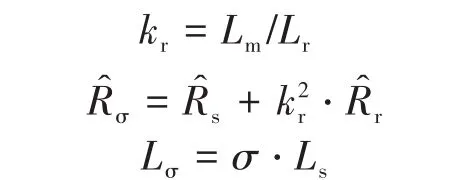
在傳統(tǒng)的感應(yīng)電機(jī)預(yù)測(cè)轉(zhuǎn)矩控制中,預(yù)測(cè)轉(zhuǎn)矩模型一般基于定子坐標(biāo)系,如下式所示[4]:
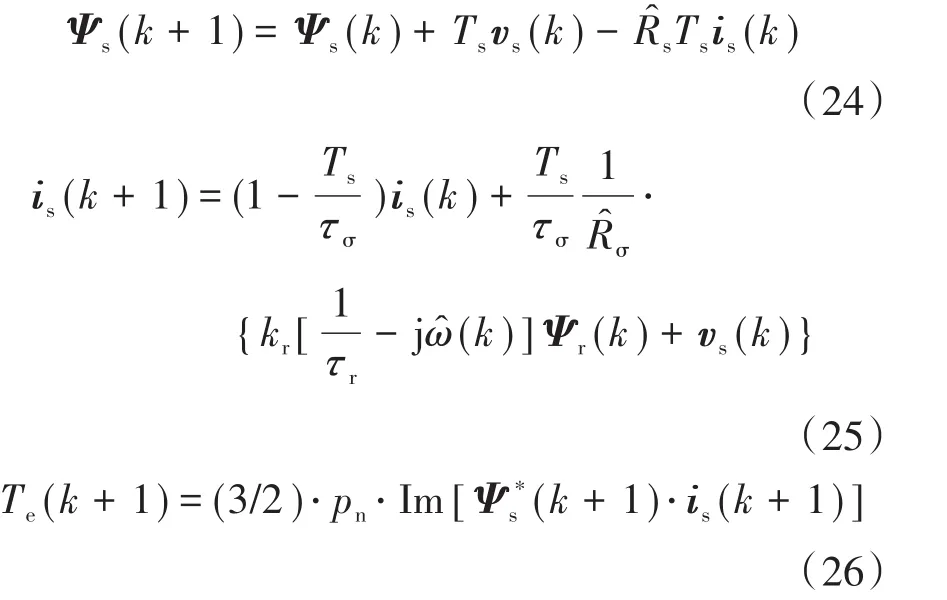
其中
式(25)中含有估計(jì)轉(zhuǎn)速項(xiàng),估計(jì)轉(zhuǎn)速的誤差會(huì)降低預(yù)測(cè)轉(zhuǎn)矩的精度。
為了提高電磁轉(zhuǎn)矩預(yù)測(cè)精度,式(25)由式(16)代替,離散化后可得:
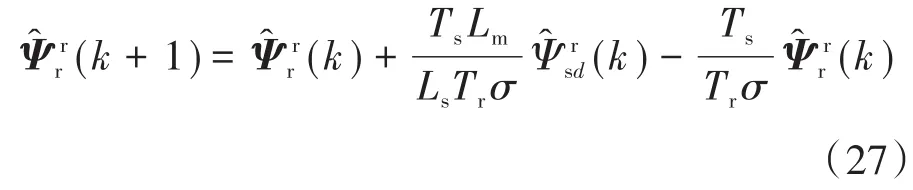
其中,Ψ?rsd(k),Ψ?rr(k)取自上文提出的新型雙坐標(biāo)系觀測(cè)器,從而消除了感應(yīng)電機(jī)的轉(zhuǎn)速信息。同樣地,為提高定子磁鏈的預(yù)測(cè)精度,預(yù)測(cè)方程加入電壓補(bǔ)償,如下式:

電磁轉(zhuǎn)矩則由定子磁鏈和轉(zhuǎn)子磁鏈計(jì)算得到,如下式所示:

2.3 代價(jià)函數(shù)設(shè)計(jì)
由于代價(jià)函數(shù)可靈活設(shè)計(jì),使得有限控制集模型預(yù)測(cè)控制成為電力電子及電力驅(qū)動(dòng)領(lǐng)域的研究熱點(diǎn)。代價(jià)函數(shù)可包含參考值跟蹤、開關(guān)頻率限制、過電流保護(hù)及頻譜含量優(yōu)化等項(xiàng)。預(yù)測(cè)控制的代價(jià)函數(shù)如下式所示:
其中
式中:T*e為電磁轉(zhuǎn)矩參考值;λ為電磁轉(zhuǎn)矩與定子磁鏈幅值之間的權(quán)重系數(shù);Im(k+h)j為過電流保護(hù)。
當(dāng)預(yù)測(cè)電流|is(k+h)|超過最大值ismax時(shí),Im(k+h)j取值為無窮大,從而舍棄此電壓矢量。
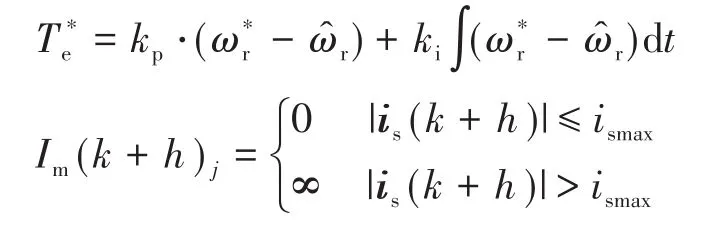
對(duì)于兩電平電壓型逆變器,如圖5所示,共有6個(gè)非零矢量和2個(gè)零矢量,2個(gè)零矢量只需預(yù)測(cè)1次,因此,評(píng)價(jià)函數(shù)需計(jì)算7次,即j=0,…,6。
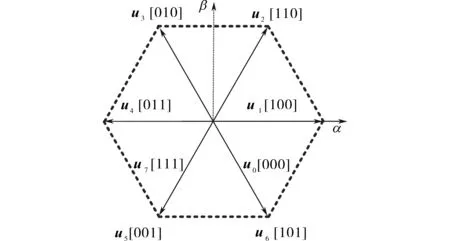
圖5 兩電平逆變器產(chǎn)生的電壓矢量Fig.5 Voltage vector generated by two-level inverter
在數(shù)字控制系統(tǒng)中,由于數(shù)字處理器執(zhí)行預(yù)測(cè)算法需要時(shí)間,因此,存在1個(gè)控制周期的時(shí)間延遲。當(dāng)前k時(shí)刻作用的電壓矢量只能在(k+1)時(shí)刻施加。為了消除數(shù)字控制系統(tǒng)的時(shí)間延遲,本文采用“觀測(cè)器+預(yù)測(cè)”的方法消除時(shí)間延遲,即觀測(cè)器采用向前歐拉公式,然后在觀測(cè)器估計(jì)(k+1)時(shí)刻感應(yīng)電機(jī)狀態(tài)變量的基礎(chǔ)上,預(yù)測(cè)(k+2)時(shí)刻感應(yīng)電機(jī)的定子磁鏈幅值和電磁轉(zhuǎn)矩。然后,依據(jù)預(yù)測(cè)值及評(píng)價(jià)函數(shù),選擇最優(yōu)的電壓矢量。
感應(yīng)電機(jī)雙坐標(biāo)系預(yù)測(cè)轉(zhuǎn)矩控制的整體框圖如圖6所示,主要由三部分組成,分別是新型雙坐標(biāo)觀測(cè)器、基于雙坐標(biāo)系的電磁轉(zhuǎn)矩及定子磁鏈預(yù)測(cè)以及評(píng)價(jià)函數(shù)優(yōu)化。

圖6 整體控制系統(tǒng)流程圖Fig.6 Block diagram of the overall control system
3 實(shí)驗(yàn)結(jié)果
3.1 實(shí)驗(yàn)平臺(tái)
所提出的算法在感應(yīng)電機(jī)實(shí)驗(yàn)平臺(tái)上進(jìn)行驗(yàn)證。實(shí)驗(yàn)平臺(tái)由一臺(tái)2.2 kW的感應(yīng)電機(jī)與永磁同步電機(jī)聯(lián)結(jié)組成。感應(yīng)電機(jī)作為預(yù)測(cè)算法實(shí)施控制的驅(qū)動(dòng)電機(jī),其中數(shù)字處理器采用TMS320F28335,電機(jī)參數(shù)為:VDC=540 V,Rs=2.68 Ω,Rr=2.13 Ω,Lm=275.1 mH,Ls=Lr=283.4 mH,pn=1.0,J=0.005 kg/m2;永磁同步電機(jī)作為負(fù)載電機(jī),主要目的是為感應(yīng)電機(jī)提供負(fù)載轉(zhuǎn)矩,由通用變頻器控制。在本實(shí)驗(yàn)中,感應(yīng)電機(jī)的狀態(tài)變量通過數(shù)模轉(zhuǎn)換器后由示波器顯示。轉(zhuǎn)子位置通過永磁同步電機(jī)自帶的增量式編碼器獲得。
3.2 實(shí)驗(yàn)結(jié)果
3.2.1 整體性能
感應(yīng)電機(jī)的正、反轉(zhuǎn)實(shí)驗(yàn)結(jié)果如圖7所示。圖中,感應(yīng)電機(jī)的轉(zhuǎn)速指令設(shè)置為從2 772 r/min到-2 772 r/min,而后返回至2 772 r/min。定子磁鏈幅值的指令設(shè)置為0.71 Wb。
圖7 感應(yīng)電機(jī)正、反轉(zhuǎn)實(shí)驗(yàn)Fig.7 Forward and reverse rotation experiment of IM
在圖7中,從上至下,依次為測(cè)量感應(yīng)電機(jī)轉(zhuǎn)速、估計(jì)轉(zhuǎn)速、電磁轉(zhuǎn)矩和定子電流波形。從圖中可看出,感應(yīng)電機(jī)正、反轉(zhuǎn)整體性能良好。在轉(zhuǎn)速動(dòng)態(tài)調(diào)節(jié)過程中,電磁轉(zhuǎn)矩最大值為7.5 N·m,此值為轉(zhuǎn)速環(huán)輸出的限幅值,同時(shí)也是感應(yīng)電機(jī)的額定轉(zhuǎn)矩。
在感應(yīng)電機(jī)的正、反轉(zhuǎn)過程中,測(cè)量轉(zhuǎn)速與估計(jì)轉(zhuǎn)速的誤差如圖8所示,其中,兩者誤差的計(jì)算公式為

從圖8中可看出,在感應(yīng)電機(jī)低速區(qū),轉(zhuǎn)速估計(jì)誤差較大,特別在正、反轉(zhuǎn)過渡的零速附近,轉(zhuǎn)速誤差可達(dá)4%。

圖8 正、反轉(zhuǎn)轉(zhuǎn)速估計(jì)誤差Fig.8 Forward and reverse speed estimation error
3.2.2 穩(wěn)態(tài)性能
在轉(zhuǎn)速指令為1 385 r/min,定子磁鏈幅值指令為0.71 Wb以及負(fù)載轉(zhuǎn)矩為5 N·m條件下(此負(fù)載轉(zhuǎn)矩由永磁同步電機(jī)提供),感應(yīng)電機(jī)的穩(wěn)態(tài)性能如圖9所示。從圖9可知,定子磁鏈幅值基本保持在0.71 Wb;電磁轉(zhuǎn)矩波動(dòng)較低,波動(dòng)范圍小于1.5 N·m;定子電流波形較好,總諧波擾動(dòng)(total harmonic distortion,THD)為4.5%。
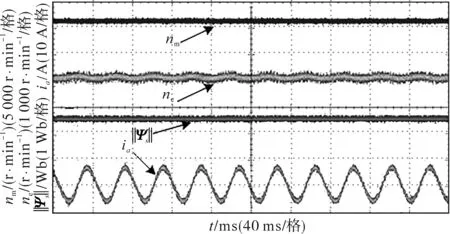
圖9 感應(yīng)電機(jī)穩(wěn)態(tài)實(shí)驗(yàn)Fig.9 Steady state of induction motor
3.2.3 低速區(qū)轉(zhuǎn)速觀測(cè)
在低速輕載狀態(tài)下,由于感應(yīng)電機(jī)定子電流以及反電動(dòng)勢(shì)過小,因此轉(zhuǎn)速觀測(cè)器的性能會(huì)變差。為了驗(yàn)證提出的觀測(cè)器在低速區(qū)的性能,感應(yīng)電機(jī)的轉(zhuǎn)速指令設(shè)置為60 r/min,然后突變至30 r/min,此時(shí)電機(jī)處于空載狀態(tài)。感應(yīng)電機(jī)測(cè)量轉(zhuǎn)速、估計(jì)轉(zhuǎn)速、定子磁鏈幅值以及定子電流波形如圖10所示。從圖10可以看出,即使在低速空載狀態(tài)下,所提出的轉(zhuǎn)速觀測(cè)器仍具有良好的性能。
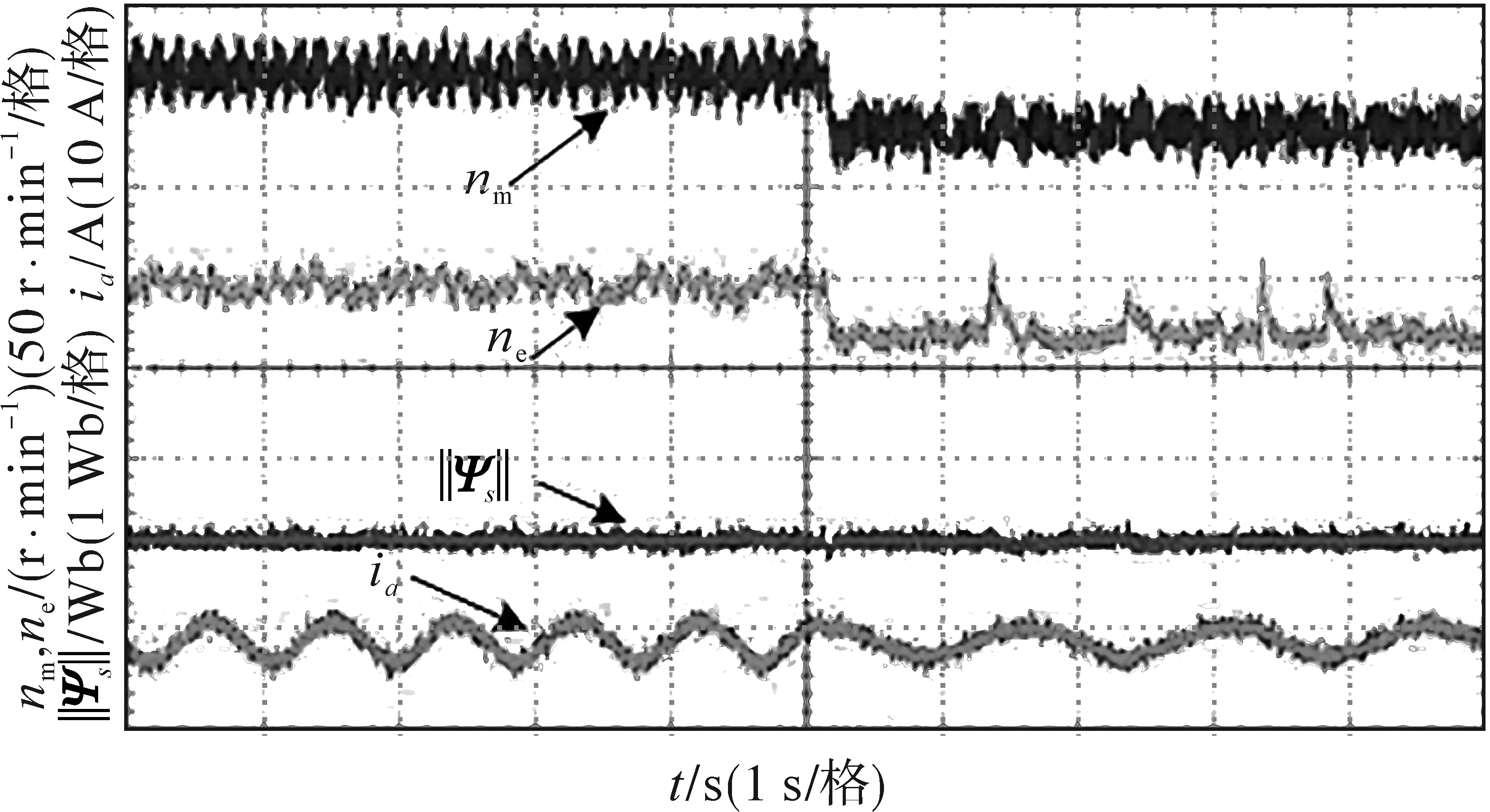
圖10 低速區(qū)轉(zhuǎn)速估計(jì)Fig.10 Speed estimation at low speed areas
3.2.4 負(fù)載擾動(dòng)響應(yīng)
當(dāng)感應(yīng)電機(jī)轉(zhuǎn)速指令為1 500 r/min且實(shí)際轉(zhuǎn)速穩(wěn)定時(shí),通過通用變頻器控制負(fù)載電機(jī),使負(fù)載轉(zhuǎn)矩從0 N·m突加至7.5 N·m,感應(yīng)電機(jī)的動(dòng)態(tài)響應(yīng)如圖11所示。從圖11可以看出,預(yù)測(cè)轉(zhuǎn)矩控制具有快速的電磁轉(zhuǎn)矩動(dòng)態(tài)響應(yīng),由于突加負(fù)載轉(zhuǎn)矩引起的轉(zhuǎn)速降低,在較短的時(shí)間內(nèi)得到了快速恢復(fù)。
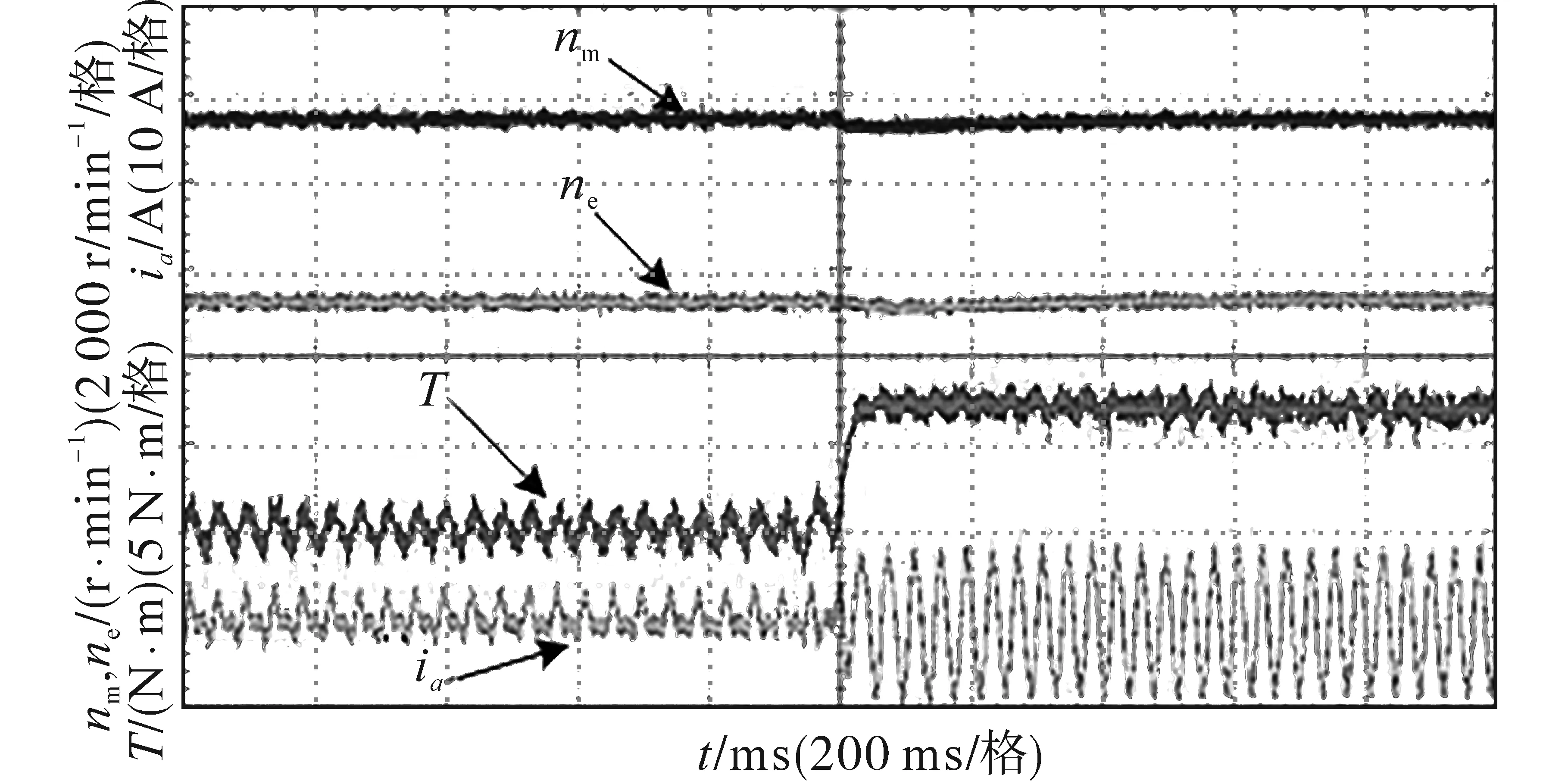
圖11 負(fù)載擾動(dòng)響應(yīng)Fig.11 Load disturbance response
4 結(jié)論
針對(duì)無速度傳感器感應(yīng)電機(jī)預(yù)測(cè)轉(zhuǎn)矩控制存在的問題,提出了新型雙坐標(biāo)系觀測(cè)器、雙坐標(biāo)系電磁轉(zhuǎn)矩預(yù)測(cè)模型。主要結(jié)論如下:
1)提出的新型雙坐標(biāo)系觀測(cè)器分離了定子磁鏈觀測(cè)和轉(zhuǎn)速估計(jì),實(shí)驗(yàn)結(jié)果表明,此觀測(cè)器在感應(yīng)電機(jī)正反轉(zhuǎn)、高速以及低速下均具有良好的性能。
2)提出的雙坐標(biāo)系轉(zhuǎn)矩預(yù)測(cè)模型不需要轉(zhuǎn)速信息,進(jìn)一步提高了電磁轉(zhuǎn)矩的預(yù)測(cè)精度,實(shí)驗(yàn)結(jié)果表明,此算法在電磁轉(zhuǎn)矩階躍指令以及負(fù)載轉(zhuǎn)矩階躍突變情況下,均具有快速的動(dòng)態(tài)響應(yīng)。
3)實(shí)驗(yàn)結(jié)果驗(yàn)證了雙坐標(biāo)系預(yù)測(cè)轉(zhuǎn)矩控制的有效性,具有較好的動(dòng)態(tài)性能和穩(wěn)態(tài)性能。因此,該方法可應(yīng)用于實(shí)際的電機(jī)驅(qū)動(dòng)系統(tǒng)中。
需要注意的是,感應(yīng)電機(jī)的整體控制性能不僅與轉(zhuǎn)速磁鏈觀測(cè)器、轉(zhuǎn)矩預(yù)測(cè)模型有關(guān),同時(shí)也與速度控制器有關(guān);此外預(yù)測(cè)轉(zhuǎn)矩控制屬于開環(huán)高增益控制范疇,高動(dòng)態(tài)響應(yīng)的同時(shí)也具有弱魯棒性的特點(diǎn)。進(jìn)一步提高預(yù)測(cè)轉(zhuǎn)矩控制的動(dòng)態(tài)性能以及魯棒性能成為下一步需要深入研究的問題。