高比例新能源和電動汽車接入背靠背并聯系統優化控制
2021-10-11 08:24:22孫旭日周超群李延真劉術波楊偉進朱國梁魏珊王碩李燕劉建文
電氣傳動 2021年19期
關鍵詞:方法
孫旭日 ,周超群,李延真,劉術波,楊偉進,朱國梁,魏珊,王碩,李燕 ,劉建文
(1.國網山東省電力公司青島供電公司,山東青島266002;2.國網山東綜合能源服務有限公司,山東濟南250021)
大力發展可再生能源和電動汽車已成為我國應對環境污染和能源危機的必經之路,在智能電網發展中具有重大的意義。但是分布式能源和電動汽車大量接入電網后,其間歇性和波動性會引起電網電壓波動、跌落、閃變等問題,傳統配電系統控制手段單一,難以應對大量間歇性可再生能源和電動汽車的接入。為此,具有安全可靠、實時可控優點的柔性開關設備應運而生,其能夠有效解決間歇性可再生能源和電動汽車接入帶來系列新問題[1-4]。
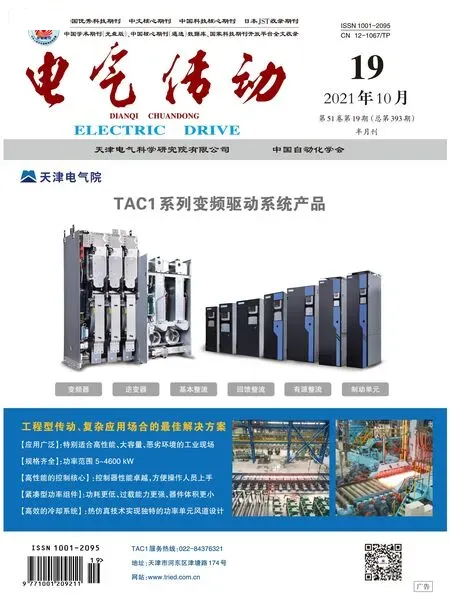
柔性開關設備的拓撲結構如圖1所示,其通過IGBT模塊組成背靠背的AC-DC-AC變流器。圖1中,VSC1和VSC2均為電壓源型變流器。柔性開關設備兩側拓撲結構完全對稱,通過對其施加控制即可實現能量雙向流動。
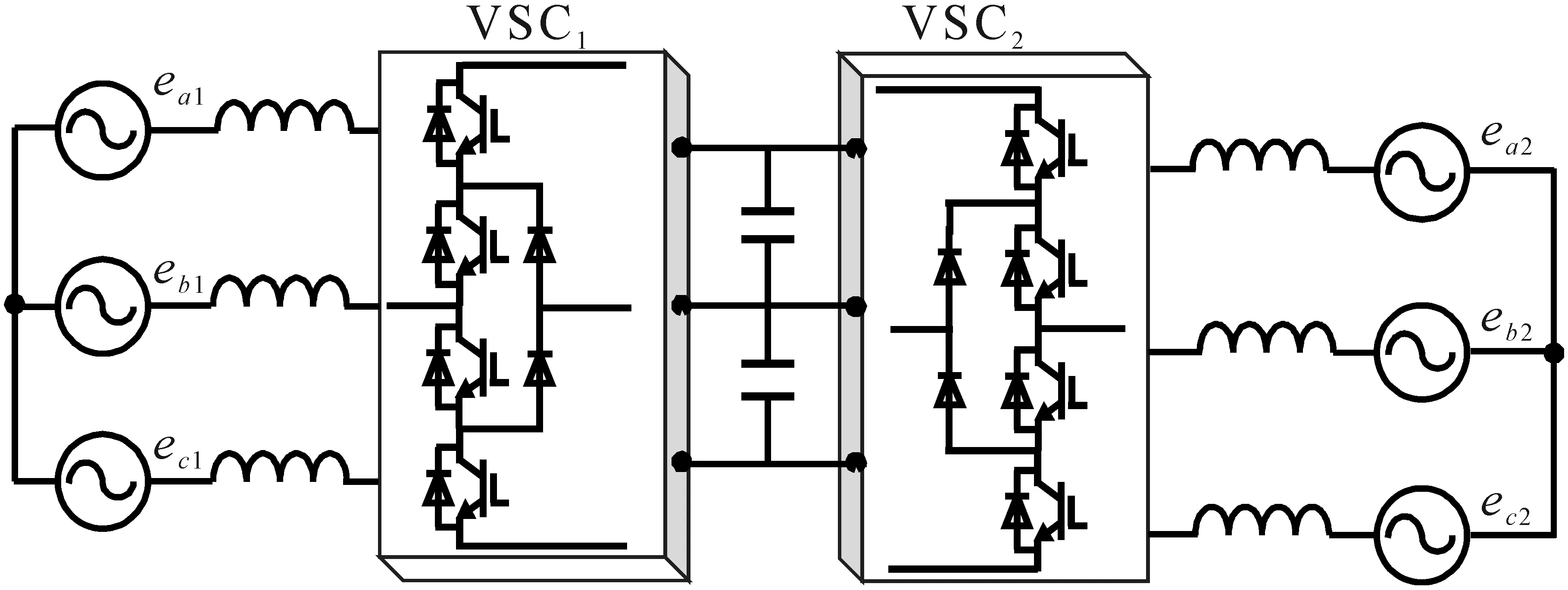
圖1 柔性開關設備拓撲結構Fig.1 Topology of soft open point equipment
和常規的饋線網絡相比,柔性開關設備應用于變電站之間面臨著不同的目標,因此需要在拓撲和控制策略方面做出相應改變。其中,多電平并聯技術能夠滿足站間柔性互聯的大容量和高壓需求,成為智能配電網的理想方案。但是柔性開關并聯設備之間由于死區時間、控制算法、電路參數等差別會產生環流[5-8],環流會引起并網電流畸變,甚至造成器件損壞。因此,研究柔性開關設備并聯的環流抑制技術意義重大[9-10]。
國內外學者主要從硬件和軟件兩個方面深入研究環流的抑制。文獻[11]提出一種載波交錯方法抑制高頻零序環流,但是在給定電流不等的情況下抑制效果不佳。文獻[12]提出修正零序注入方法抑制零序環流。文獻[13]提出一種重復控制器的零序環流抑制方法,可改善零序環流抑制效果。此外,文獻[14]提出一種比例積分控制器,通過改變小矢量作用時間實現環流抑制和中點電位平衡控制。文獻[15]提出一種反饋控制方法,通過調整小矢量作用時間有效抑制零序環流。文獻[16]提出一種D-∑數字控制方法抑制環流,新方法在給定電流相等和不相等情況下抑制效果均明顯。文獻[17]提出一種多采樣環流抑制方法,新方法在不增加開關頻率的情況下克服系統延遲的影響,零序環流抑制效果比單采樣方法更佳。文獻[18-20]提出一種基于改進型LCL濾波器的三電平逆變器并聯拓撲,通過改變小矢量作用時間實現高頻和低頻環流抑制。
上述文獻只是針對逆變器單向運行,在背靠背系統中,上述方法并不適用。文獻[21]針對背靠背并聯系統,建立系統的環流模型,并提出一種比例積分控制器,通過改變零矢量作用時間實現零序環流抑制。文獻[22]針對獨立直流電源的背靠背并聯系統,首先分析了零序環流的流通路徑,然后建立背靠背并聯系統零序環流模型,最后提出一種新穎的控制策略,實現了零序環流抑制。上述控制方法在電機背靠背并聯系統上具有很好的效果,但在基于背靠背的AC-DC-AC變流器的柔性開關設備中并不適用。考慮到新能源和電動汽車間歇性的影響,如果采用單機系統,首先會影響開關設備的效率,其次是影響柔性開關系統的可靠性。因此,本文提出一種背靠背柔性并聯系統運行技術,根據新能源發電量投入需要的背靠背柔性開關數量,并提出低通信預測控制方法實現設備之間的環流抑制。此外,新能源和電動汽車的間歇性和波動性會引起電網電壓波動、跌落、閃變等問題。傳統控制方法難以快速應對大量間歇性可再生能源和電動汽車的接入影響。為此,本文基于柔性開關設備,提出一種新型預測控制方法實現零序環流抑制和并網電流精準跟蹤,并通過樣機驗證提出算法的正確性。
1 三電平柔性開關設備并聯模型
圖2所示為并聯柔性開關系統為背靠背的AC-DC-AC變流器共交流側和直流側電網結構。以直流側N點為參考點,根據基爾霍夫電壓、電流定律,能夠得到并聯柔性開關設備的狀態空間方程如下式:
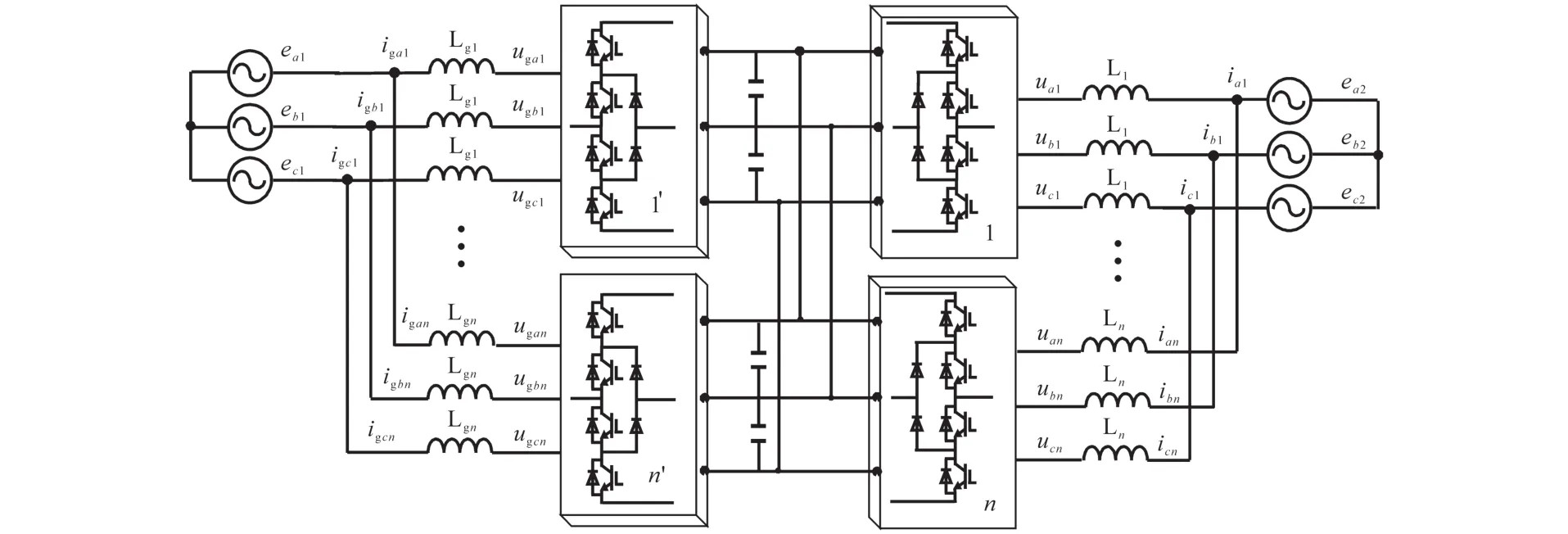
圖2 并聯柔性開關設備拓撲結構Fig.2 Topology of parallel soft open point equipment
式中:eai,ebi,eci為電網電壓,i=1,2;iga1,igb1,igc1和igan,igbn,igcn分別為三電平變流器 1'和 n'的并網電流;uON為電網O點和電源負極N點的電壓;Lg1和Lgn分別為三電平變流器1'和n'的輸出濾波電感;ia1,ib1,ic1和ian,ibn,icn分別為三電平變流器1和n的并網電流;L1和Ln分別為三電平變流器1和n的輸出濾波電感;ua1,ub1,uc1和 ua2,ub2,uc2分別為三電平變流器1和n輸出相電壓。
對于并聯柔性開關設備,變流器1、變流器n和變流器1'、變流器n'環流控制方法相同,限于篇幅,本文僅分析變流器1、變流器n環流控制方法。
利用Clark變換,三電平變流器在靜止坐標系下模型表示為

其中
假設中點電位控制平衡,因此三電平變流器的輸出電壓可以表示為

其中
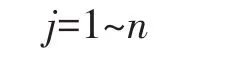
式中:Vdc為變流器直流側電壓;Sxj為開關信號。
三電平變流器每一相的開關狀態輸出定義為P,O,N。Sxj表示為
圖3為三電平變流器電壓空間矢量圖。根據電壓矢量的幅值,電壓矢量可以分為大矢量、中矢量、小矢量和零矢量。
對式(5)進行離散化:

式中:Ts為采樣時間。
實際執行中,如果不考慮延遲的影響,并網電流將發生畸變。為了解決延遲造成的影響,離散化電流需要考慮超前一步預測,因此,式(8)可以表示為
圖3 三電平變流器空間矢量圖Fig.3 Space-vector diagram of a three-level converter
根據拉格朗日定理得到eα2(k+1)和eβ2(k+1)表達式為

因此,根據式(9)可以得到電壓矢量為
式中:u*αj(k+1),u*βj(k+1),i*αj(k+1),i*βj(k+1)分別為電壓和電流的參考值。
三電平變流器零序環流能夠定義為

由式(1)和式(2)可以得到并聯系統的零序環流表達式為

式中:uzj為零序環流的激勵源。
激勵源uzj表示為
其中
式中:dzj為零序占空比;dxj分別為a,b,c三相的零序占空比。
圖4為簡單化的并聯系統。從圖中可以看出,零序環流只在變流器之間流動。因此,變流器之間零序環流之和為零,即

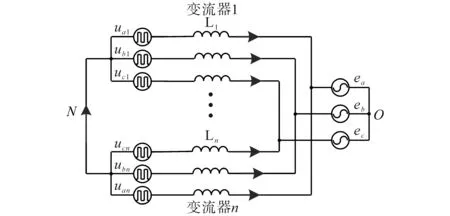
圖4 簡單化的并聯系統電路Fig.4 The simplified circuit of the n-paralleled system
假設n-1臺變流器得到控制,第n臺變流器也會得到控制。因此n-1臺變流器能夠表示為下式:
因此,n-1臺變流器的零序環流表示為
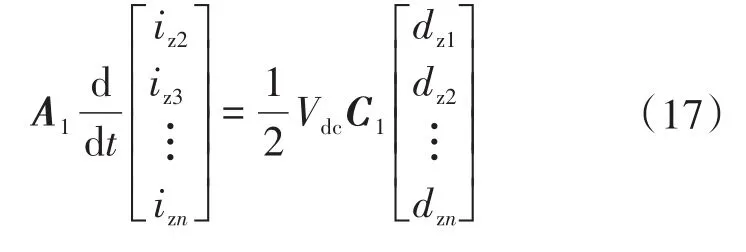
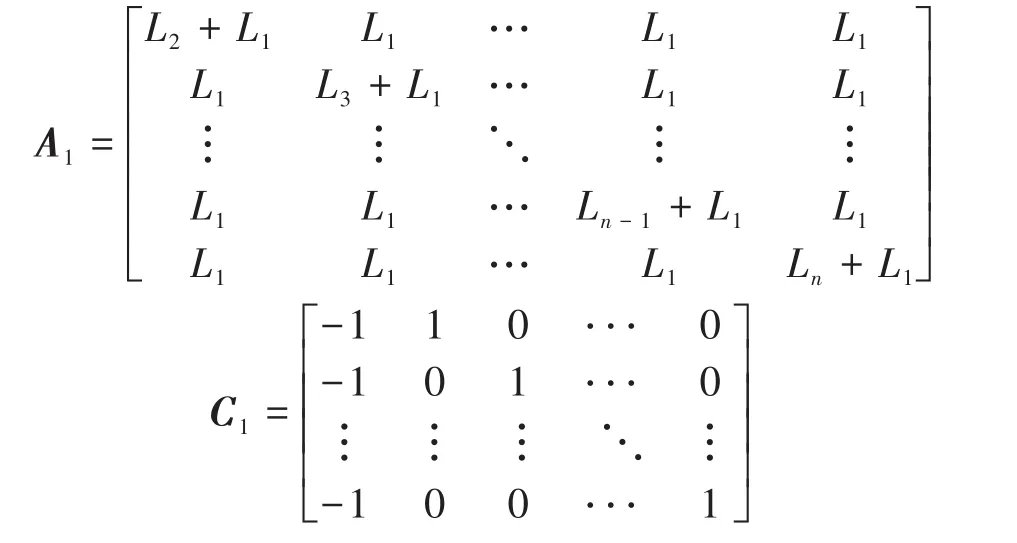
其中
2 三電平柔性開關設備并聯環流抑制
在三電平柔性開關設備中,為了提高直流電壓利用率并降低并網諧波,一般采用空間矢量調制方法。在不同的控制目標下,矢量的作用時間不能影響輸出并網電流波形。因此,本文可以通過改變零序電壓作用時間(即等效小矢量作用時間)抑制零序環流,其中控制變量uzj表示為
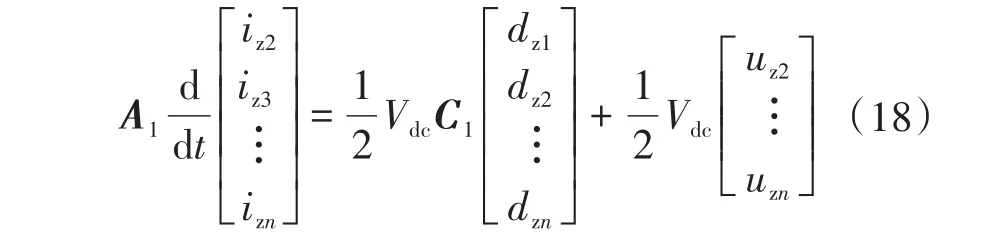
對式(18)離散化可以得到零序環流表達式為
其中
為了獲得最優的變量,性能因數定義為
對式(20)做一階求導,如下式:
式中:Yzj為第2~n臺變流器的零序環流值。
假設式(21)等于0,能夠獲得變量uzj為
因此,最優的控制變量uzj為
式(23)代入到式(15)中可以得到uzj為

從上面的分析可知,變流器的零序注入電壓只和第1臺變流器相關,因此該方法能夠減少通信信息。
因此,最優的輸出電壓表示為
圖5為所提方法的控制流程框圖。從圖5中可以看出,α軸電流和β軸電壓矢量由給定電流計算,z軸電流由零序占空比計算,最優的補償值通過式(22)計算可得。最后將最優的輸出電壓矢量送入到載波調制中,實現并網電流跟蹤和零序環流抑制。
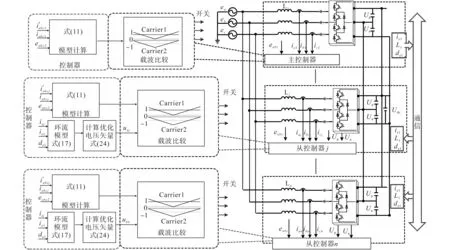
圖5 提出方法的控制框圖Fig.5 Control scheme of the proposed method
3 仿真和實驗結果
為了證明理論分析的正確性,本文采用傳統預測控制和所提方法比較驗證。仿真和實驗參數為:電網電壓有效值ea=eb=ec=220 V,直流側電壓650 V,直流側電容3 300 μF,逆變側電流峰值10/15/20 A,濾波電感2/3 mH,開關頻率5 kHz。
3.1 仿真結果
圖6為兩臺變流器參考電流不相等工況下的仿真波形。第1臺電流為10 A,第2臺電流為20 A。如圖6所示,當采用傳統預測控制方法后,零序環流為4 A。當采用所提預測控制方法后,零序環流降為0.5 A,并網電流THD僅為1.5%。
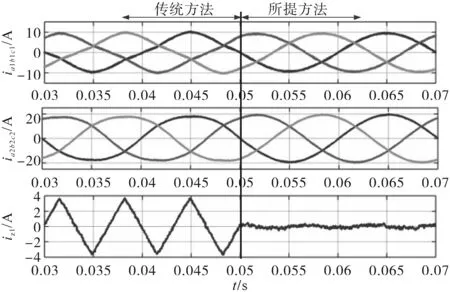
圖6 電流不相等時采用傳統方法和所提方法電流和零序環流仿真結果Fig.6 Current and ZSCC simulation results with unequal reference currents using conventional method and proposed method
為了進一步證明方法的有效性,在電流和電感都不相等的工況下進行仿真,圖7為仿真結果。第1臺電流為10 A,第2臺電流為20 A;L1=2 mH,L2=3 mH。從圖7中可以明顯看出,當采用傳統預測控制方法后,零序環流的幅值為6 A,并網電流發生嚴重畸變。當所提預測控制方法應用到系統后,零序環流幅值為1 A,并網電流THD僅為1.5%。

圖7 電流電感不相等時采用傳統方法和所提方法后電流、零序環流仿真結果Fig.7 Current and ZSCC simulation results with unequal reference currents and unequal inductor using conventional method and proposed method
圖8為變流器2的電流從20 A降為0 A過程中電流和零序電流波形。從圖8a可以看出,采用傳統預測控制方法,零序環流在3 A到5 A之間波動;從圖8b可以看出,當采用所提預測方法后,零序環流降到0.5 A以內。因此,仿真表明所提方法在電流跳變時能夠很好地抑制零序環流。
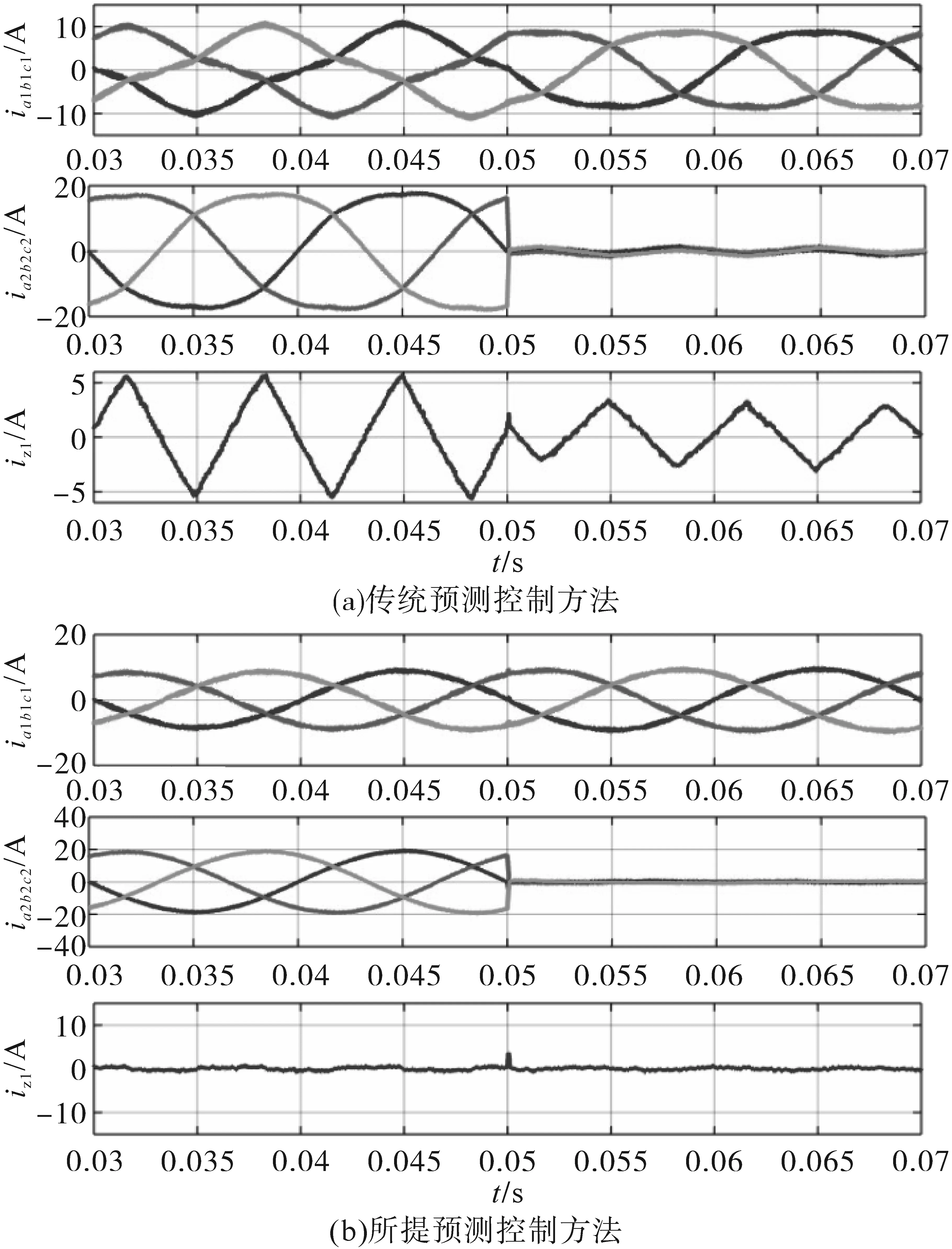
圖8 相電流和零序電流動態響應波形Fig.8 Transient response waveforms of the phase currents and the zero-sequence current
3.2 實驗結果
為了進一步證明所提方法的有效性,將所提方法與傳統預測控制方法進行對比,實驗參數與仿真參數一致,實驗結果包括穩態結果。圖9和圖10為電流不相等的實驗結果,第1臺電流為10 A,第2臺電流為15 A。如圖所示,當采用傳統預測控制方法時,零序環流的幅值為5 A。當采用所提方法后,零序環流降為0.5 A,輸出電流的并網THD降為1.9%。
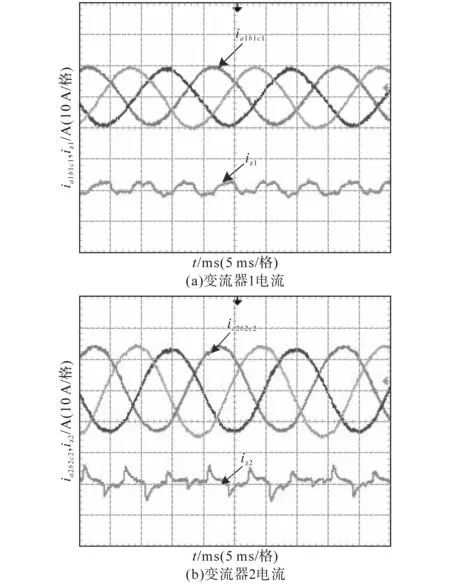
圖9 電流不相等情況下采用傳統預測控制方法的實驗結果Fig.9 Experimental waveforms under unequal current using conventional model predictive control method
圖10 電流不相等情況下采用所提預測控制方法的實驗結果Fig.10 Experimental waveforms under unequal current using proposed model predictive control method
圖11和圖12為電感和電流均不相等情況的實驗波形。第1臺電流為10 A,第2臺電流為15 A;L1=2 mH,L2=3 mH。如圖11所示,采用傳統方法時,由于存在零序環流,并網電流發生嚴重畸變。為了解決這個問題,采用所提預測控制方法后,并網電流畸變消失,零序環流降為1 A。

圖11 電流和電感不相等情況下采用傳統預測控制方法的實驗結果Fig.11 Experimental waveforms under unequal current and inductor using conventional predictive control method
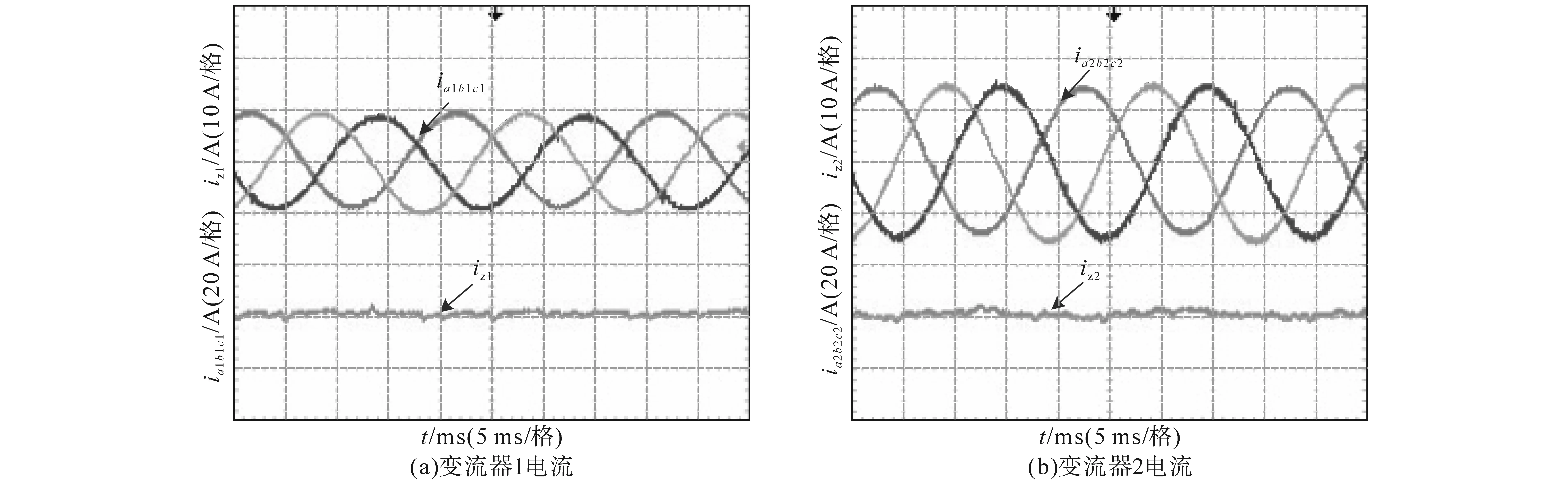
圖12 電流和電感不相等情況下采用提出預測控制方法的實驗結果Fig.12 Experimental waveforms under unequal current and inductor using proposed model predictive control method
4 結論
柔性開關設備作為配網設備,可極大提高新能源和電動汽車的消納率。考慮到新能源和電動汽車接入的間歇性,設備的并聯技術成為一種理想方案,但是設備之間存在零序環流。為此,本文提出一種低通信模型預測控制方法,并建立低通信多機柔性開關設備并聯模型,設計了環流最小的目標函數,求解環流最小的電壓矢量。然后通過改變矢量作用時間抑制零序環流。針對并網電流跟蹤問題,通過建立電壓矢量模型,并將其代入到載波調制中,實現電流精準快速跟蹤控制。最后通過仿真和實驗驗證了低通信預測控制方法能夠實現環流的高效抑制和并網電流的精準跟蹤。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12