基于擴(kuò)展卡爾曼濾波的三軸氣浮臺(tái)質(zhì)心位置測(cè)算方法
2021-10-11 06:17:14胡奇飛
機(jī)械工程與自動(dòng)化 2021年5期
關(guān)鍵詞:模型
胡奇飛,李 穩(wěn)
(中聯(lián)恒通機(jī)械有限公司,湖南 長(zhǎng)沙 410073)
0 引言
三軸氣浮臺(tái)通過(guò)氣浮球軸承實(shí)現(xiàn)近似無(wú)摩擦的系統(tǒng)來(lái)模擬太空失重環(huán)境,需要通過(guò)調(diào)平衡裝置將質(zhì)心調(diào)節(jié)到轉(zhuǎn)動(dòng)中心的位置以消除重力帶來(lái)的干擾力矩。因此,調(diào)平衡技術(shù)是實(shí)現(xiàn)高精度氣浮臺(tái)的關(guān)鍵技術(shù)。一般而言,自動(dòng)調(diào)平衡技術(shù)較人工調(diào)平技術(shù)效率高、精度高,是當(dāng)前研究的熱點(diǎn)。
為實(shí)現(xiàn)精確調(diào)平衡,必須先測(cè)算出質(zhì)心的精確位置。通過(guò)Pro/E軟件建立氣浮臺(tái)的三維模型,可以初步計(jì)算氣浮臺(tái)的質(zhì)心位置,但由于電線(xiàn)、焊接點(diǎn)等零部件建模存在困難,這一方法無(wú)法精確計(jì)算出質(zhì)心的位置。起初,研究人員通過(guò)測(cè)量氣浮臺(tái)的擺動(dòng)周期來(lái)測(cè)算質(zhì)心位置的偏移,進(jìn)而進(jìn)行配平。這種方法將氣浮臺(tái)等效為3D復(fù)擺[1],但這一方法需要反復(fù)測(cè)量氣浮臺(tái)的擺動(dòng)周期,所需調(diào)節(jié)時(shí)間較長(zhǎng)。隨后,人們提出基于氣浮臺(tái)的剛體動(dòng)力學(xué)方程來(lái)控制執(zhí)行機(jī)構(gòu),調(diào)節(jié)質(zhì)心位置,文獻(xiàn)[2]給出了通過(guò)2個(gè)傾角傳感器實(shí)現(xiàn)水平方向自動(dòng)配平的方法,文獻(xiàn)[3]和文獻(xiàn)[4]提出了在已知轉(zhuǎn)動(dòng)慣量的情況下計(jì)算質(zhì)心的方法。
本文通過(guò)建立三軸氣浮臺(tái)的動(dòng)力學(xué)模型,采用基于最小二乘法和擴(kuò)展卡爾曼濾波處理姿態(tài)信息、計(jì)算質(zhì)心位置,求解配重滑塊位置,實(shí)現(xiàn)氣浮臺(tái)自動(dòng)調(diào)平衡,并與周期反饋算法進(jìn)行比較。
1 三軸氣浮臺(tái)動(dòng)力學(xué)模型建立與數(shù)值仿真
1.1 三軸氣浮臺(tái)全物理仿真設(shè)備
三軸氣浮臺(tái)由支撐座、氣浮球軸承和轉(zhuǎn)動(dòng)臺(tái)體三部分組成。氣浮球軸承通過(guò)球窩上布置的噴嘴噴出高壓氣體,在球窩與球頭間形成一層極薄的氣膜,實(shí)現(xiàn)三軸近似無(wú)摩擦轉(zhuǎn)動(dòng)。氣浮臺(tái)采用傘形結(jié)構(gòu),其三維模型如圖1所示。
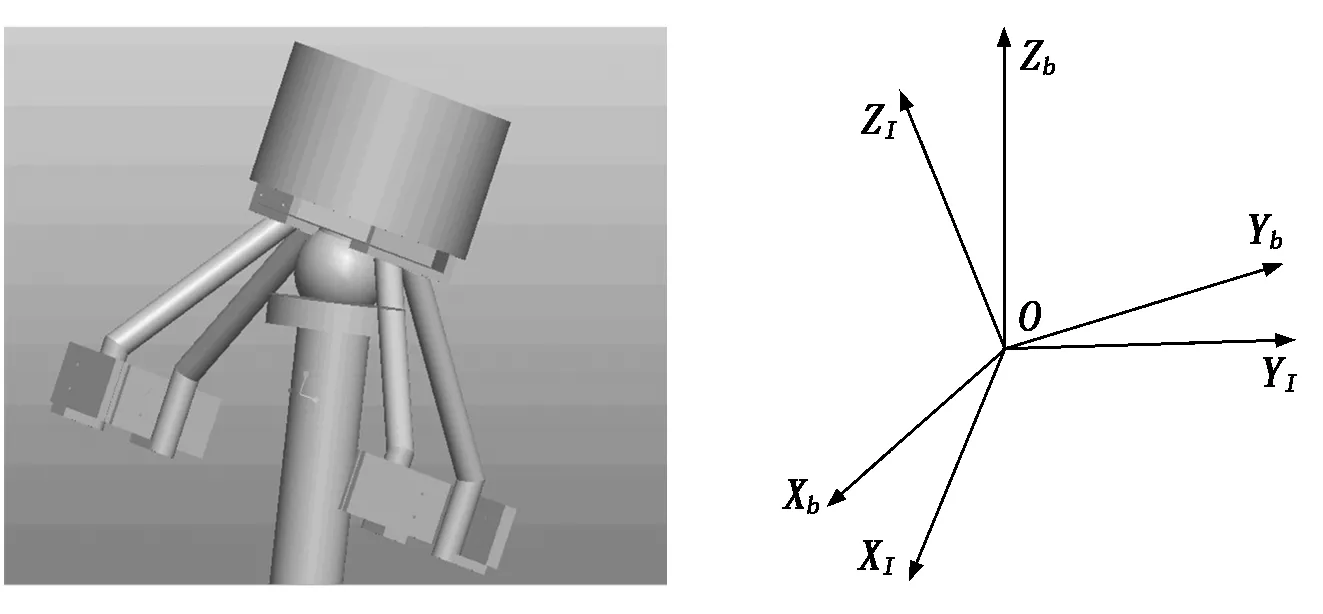
圖1 氣浮臺(tái)三維模型 圖2 慣性坐標(biāo)系和隨體坐標(biāo)系
通過(guò)Pro/E建立的三維模型計(jì)算得到氣浮臺(tái)的質(zhì)量m=136.953 22 kg,其質(zhì)心位置偏移r=[0,0,-1.851 949 3×10-3] m,氣浮臺(tái)相對(duì)于轉(zhuǎn)動(dòng)中心(球頭球心)的轉(zhuǎn)動(dòng)慣量為:
(1)
其中:Ixx、Iyy、Izz分別為氣浮臺(tái)相對(duì)于X、Y、Z的轉(zhuǎn)動(dòng)慣量;Ixy、Ixz、Iyx、Iyz、Izx和Izy均為慣量積。
臺(tái)體上布置一個(gè)兩軸傾角儀,輸出頻率為100 Hz,精度為0.002°,測(cè)量臺(tái)體角度信息,通過(guò)數(shù)據(jù)處理可測(cè)得臺(tái)體的擺動(dòng)周期。
1.2 三軸氣浮臺(tái)動(dòng)力學(xué)模型
以三軸氣浮臺(tái)的轉(zhuǎn)動(dòng)中心作為原點(diǎn)建立隨體坐標(biāo)系O-XbYbZb和慣性坐標(biāo)系O-XIYIZI,如圖2所示。


(2)
其中:ψ為偏航角;θ為俯仰角;β為滾轉(zhuǎn)角。
對(duì)于歐拉角速度方程,有:
(3)
又有動(dòng)量矩定理:

(4)
其中:M0為作用于氣浮臺(tái)的外力矩矢量和;L0為氣浮臺(tái)質(zhì)心的動(dòng)量矩。
由于氣浮臺(tái)旋轉(zhuǎn)中心與質(zhì)心不重合,所以又有:
(5)
其中:r為質(zhì)心偏移量;Lc為氣浮臺(tái)相對(duì)于質(zhì)心的角動(dòng)量;ω為氣浮臺(tái)相對(duì)于慣性坐標(biāo)系的角速度。
Lc的計(jì)算公式為:
(6)
將式(5)和式(6)代入式(4),可得:


其中:A為角動(dòng)量運(yùn)算矩陣;B為軸向偏移分量;M為重力干擾力矩(這里不考慮重力以外的其他干擾力矩),其計(jì)算公式為:

考慮到臺(tái)體轉(zhuǎn)速較慢,ω、r均為小量,只考慮主慣量情況下簡(jiǎn)化得:
(8)
其中:rx、ry、rz分別為質(zhì)心在x、y、z軸的偏移量。
2 基于復(fù)擺模型的質(zhì)心位置測(cè)算方法
當(dāng)氣浮臺(tái)小角度擺動(dòng)時(shí),可以將臺(tái)體近似作為復(fù)擺處理。將氣浮臺(tái)的運(yùn)動(dòng)分解,假設(shè)只繞X軸運(yùn)動(dòng),復(fù)擺周期為:
(9)
其中:I為轉(zhuǎn)動(dòng)慣量。
則由式(9)可求解得到質(zhì)心在豎直方向的偏移為:
(10)
水平方向質(zhì)心偏移為:
(11)
其中:α為X軸傾角;χ為臺(tái)體轉(zhuǎn)動(dòng)180°后的傾角。
通過(guò)電機(jī)上移4個(gè)外伸臂的滑塊,氣浮臺(tái)擺動(dòng)周期增大,通過(guò)式(10)換算得出氣浮臺(tái)質(zhì)心,如圖3所示。
圖3(a)可以看出,氣浮臺(tái)擺動(dòng)周期從22 s調(diào)整到160 s耗時(shí)15 min左右,通過(guò)式(10)和式(7)可求得垂直方向質(zhì)心偏移量約為2.78×10-5m,此時(shí)系統(tǒng)干擾力矩約為0.82×10-2Nm。由圖3(b)可以看出,水平方向質(zhì)心偏移量在加大,氣浮臺(tái)平衡性變差。

圖3 周期反饋算法氣浮臺(tái)質(zhì)心調(diào)試效果
3 基于動(dòng)力學(xué)反演的質(zhì)心位置測(cè)算方法
3.1 基于最小二乘法的質(zhì)心位置測(cè)算方法
設(shè)第1個(gè)測(cè)量時(shí)間為t1,第2個(gè)測(cè)量時(shí)間為t2,Δt=t2-t1,基于式(8),變形可求解質(zhì)心位置:
(12)


將式(12)寫(xiě)為:
ΔΩ=Φr.
(13)
其中:ΔΩ為角速度增量數(shù)組;Φ為3×3矩陣。
則求廣義逆矩陣,質(zhì)心的偏差可通過(guò)最小二乘法求得為:
r=(ΦTΦ)-1ΦTΔΩ.
(14)
通過(guò)最小二乘法,計(jì)算得到質(zhì)心的位置如圖4所示,質(zhì)心測(cè)算速度比周期反饋算法快,但始終存在一定的水平質(zhì)心偏移量。
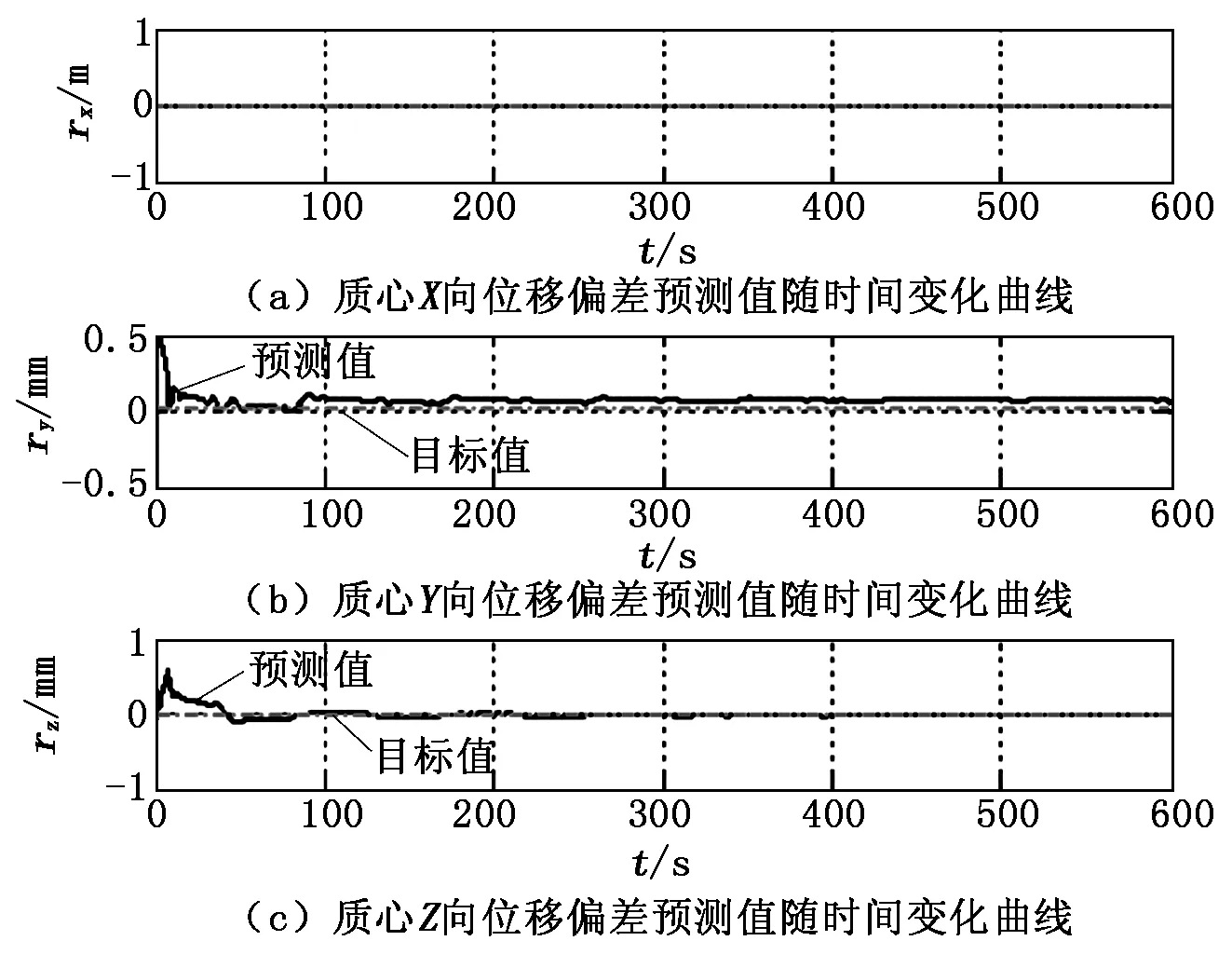
圖4 基于最小二乘法的質(zhì)心位置測(cè)算結(jié)果
3.2 基于擴(kuò)展卡爾曼濾波(EKF)的質(zhì)心位置測(cè)算方法

(15)
(16)

狀態(tài)轉(zhuǎn)移矩陣為:
(17)

(18)
觀測(cè)矩陣為:
(19)
預(yù)測(cè)狀態(tài)的協(xié)方差矩陣Rk與濾波增益矩陣Kk分別為:
(21)
(22)
狀態(tài)值和協(xié)方差矩陣更新為:
(23)

由圖5可知,EKF濾波對(duì)于質(zhì)心位置的測(cè)算收斂速度與最小二乘法相差不大,都優(yōu)于周期反饋算法;但EKF濾波偏差較最小二乘法小,能更精確地測(cè)量質(zhì)心位置。

圖5 基于EKF濾波的質(zhì)心位置測(cè)算結(jié)果
4 實(shí)驗(yàn)結(jié)果與分析
在三軸氣浮臺(tái)上,以氣浮臺(tái)擺動(dòng)周期大于160 s為目標(biāo),此時(shí)系統(tǒng)的干擾力矩小于10-2N·m,分別采用周期反饋算法、基于最小二乘法的質(zhì)心算法和基于EKF的質(zhì)心算法進(jìn)行調(diào)試。三種算法各取3次調(diào)試結(jié)果,如表1所示。

表1 三種不同算法的氣浮臺(tái)周期與質(zhì)心調(diào)試效果對(duì)比
由表1可以看出,氣浮臺(tái)擺動(dòng)周期調(diào)整到160 s,周期反饋算法耗時(shí)最多,需要1 050 s左右;最小二乘法和EKF質(zhì)心算法耗時(shí)相近,為630 s左右;調(diào)整結(jié)束后,Y軸偏擺角度周期反饋算法最大,為4°~5°,EKF算法最小,為1°左右,質(zhì)心位置測(cè)算最精準(zhǔn)。
5 結(jié)論
本文建立三軸氣浮臺(tái)的動(dòng)力學(xué)模型,通過(guò)數(shù)值計(jì)算,仿真其運(yùn)動(dòng)過(guò)程中的角度和角速度變化。其次通過(guò)實(shí)驗(yàn)測(cè)量的角度變化,計(jì)算氣浮臺(tái)的擺動(dòng)周期,從而測(cè)算質(zhì)心的位置。再次,通過(guò)動(dòng)力學(xué)反演的方法,采用最小二乘法和EKF處理姿態(tài)信息,并分析質(zhì)心位置的計(jì)算速度與精度。最后在氣浮臺(tái)上分別采用上述三種算法進(jìn)行調(diào)試,從實(shí)驗(yàn)結(jié)果分析得出,基于EKF算法的調(diào)試時(shí)間最短,質(zhì)心位置精度最高。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
