基于馬爾可夫過程的快速SIL驗(yàn)證方法研究
2021-10-09 11:56:20崔銘芳杜炘潔
自動(dòng)化儀表 2021年9期
付 進(jìn),張 渺,崔銘芳,杜炘潔
(中國(guó)石油西南油氣田分公司安全環(huán)保與技術(shù)監(jiān)督研究院,四川 成都,610041)
0 引言
近年來(lái),社會(huì)對(duì)工業(yè)過程安全日益重視,安全儀表系統(tǒng)的應(yīng)用也越來(lái)越普遍。為保證新建或改造的安全儀表系統(tǒng)能夠滿足現(xiàn)有的生產(chǎn)工藝需求,將生產(chǎn)風(fēng)險(xiǎn)控制在合理、可接受的范圍內(nèi),需要對(duì)安全儀表系統(tǒng)開展安全完整性等級(jí)(safety integrity level,SIL)評(píng)價(jià)[1]。這也是完整性管理體系中的重要環(huán)節(jié)[2]。目前,常用的方法主要包括可靠性框圖[3]、故障樹[4]、馬爾可夫(Markov)模型法[5-6]等。其中,Markov模型法對(duì)安全儀表系統(tǒng)的各方面因素考慮全面。但該方法運(yùn)算量大,時(shí)間成本相對(duì)較高。尤其在安全性能要求高的高冗余系統(tǒng)(例如大型高含硫天然氣凈化廠的安全儀表系統(tǒng))中,Markov模型法的缺陷將被進(jìn)一步放大,因此并未得到廣泛應(yīng)用。
郭海濤等[7]通過對(duì)狀態(tài)轉(zhuǎn)移矩陣預(yù)先迭代相乘來(lái)降低計(jì)算量;Brissaud等[8]通過部分測(cè)試和全面測(cè)試的試驗(yàn)分析,提出一種簡(jiǎn)化的計(jì)算方法;王海清等[9]提出一種多階段馬爾科夫模型簡(jiǎn)化算法。這些方法在一定程度上減少了計(jì)算量,但其實(shí)質(zhì)都是通過數(shù)學(xué)近似來(lái)簡(jiǎn)化運(yùn)算,從而引入了計(jì)算誤差。因此,本文以Markov過程理論為基礎(chǔ),提出了快速馬爾可夫方法(rapid Morkov,R-Markov)。該方法在保證計(jì)算精度的前提下顯著降低時(shí)間成本,能夠應(yīng)用于大規(guī)模的安全儀表系統(tǒng)的SIL驗(yàn)證。
1 Markov模型法計(jì)算平均要求時(shí)失效概率
1.1 SIL定級(jí)計(jì)算方法
安全儀表系統(tǒng)的SIL定級(jí)本質(zhì)是計(jì)算系統(tǒng)中安全儀表功能(safety instrumentation function,SIF)的平均要求時(shí)失效概率(probability of failure on demand,PFD)。該概率值pa為回路中傳感器、邏輯單元、最終元件的平均要求時(shí)失效概率ps、pl、pfe之和[10]。
pa=ps+pl+pfe
(1)
SIL與PFD的關(guān)系如表1所示。
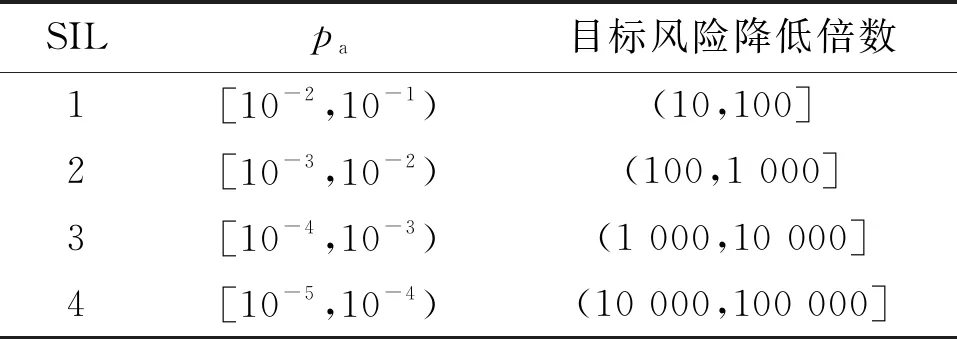
表1 SIL與PFD的關(guān)系
根據(jù)每個(gè)安全儀表功能的平均要求時(shí)失效概率大小,驗(yàn)證其是否滿足所需 SIL要求。如果計(jì)算所得的概率小于或等于相應(yīng)SIL等級(jí)的失效概率,說(shuō)明按現(xiàn)有的配置狀態(tài)滿足SIL的要求;反之,則說(shuō)明按現(xiàn)有的配置狀態(tài)不滿足所需SIL的要求,要對(duì)現(xiàn)有配置中的某一個(gè)元件或某幾個(gè)元件的冗余配置進(jìn)行改進(jìn),例如逐級(jí)增加冗余配置。對(duì)于改進(jìn)后的安全儀表功能作再次計(jì)算,直到最終概率滿足要求為止[11]。
1.2 Markov模型法
Markov模型法基于Markov過程理論,將系統(tǒng)劃分為若干獨(dú)立狀態(tài),狀態(tài)間會(huì)以特定概率相互轉(zhuǎn)移。系統(tǒng)將來(lái)所處的狀態(tài)和系統(tǒng)的歷史狀態(tài)無(wú)關(guān),只和當(dāng)前狀態(tài)有關(guān)。Markov模型的這個(gè)特性恰好能夠解決電子電氣系統(tǒng)失效的指數(shù)概率密度問題。因此,Markov模型很適合用來(lái)進(jìn)行安全儀表系統(tǒng)失效分析,包括多個(gè)影響可靠性的因素,例如結(jié)構(gòu)冗余、共因失效、自診斷、在線或離線測(cè)試維修、非理想的維修測(cè)試、周期性功能測(cè)試、單一或多個(gè)維修隊(duì)伍等。本文涉及的可靠性參數(shù)及計(jì)算方法如表2所示。表2中,M、S、Cd、CS、β分別代表平均修復(fù)時(shí)間、裝置誤動(dòng)作重啟時(shí)間、危險(xiǎn)覆蓋因子、安全覆蓋因子以及共因失效因子。
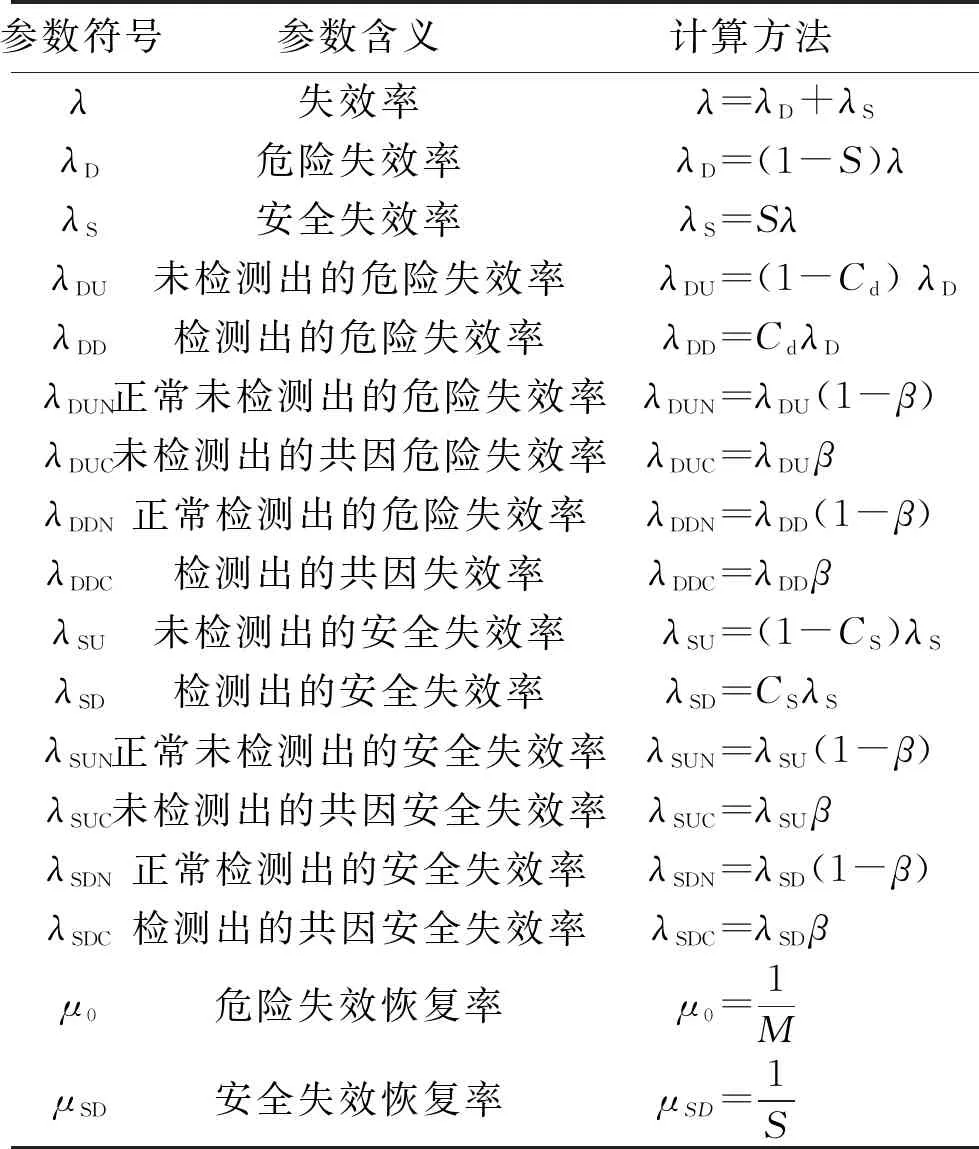
表2 可靠性參數(shù)及計(jì)算方法
安全儀表系統(tǒng)的過程周期由啟動(dòng)、運(yùn)行、失效以及修復(fù)后再運(yùn)行等一系列事件序列組成。通過Markov模型可以高效、高精度地模擬系統(tǒng)中的靜態(tài)關(guān)系和復(fù)雜的動(dòng)態(tài)變化。但模型的狀態(tài)數(shù)量會(huì)隨系統(tǒng)的復(fù)雜程度遞增。如果一個(gè)組件有5種失效模式,那么包括正常狀態(tài)在內(nèi)共有6種狀態(tài),對(duì)應(yīng)的是6維狀態(tài)轉(zhuǎn)移矩陣。1oo2系統(tǒng)狀態(tài)轉(zhuǎn)移模型如圖1所示。
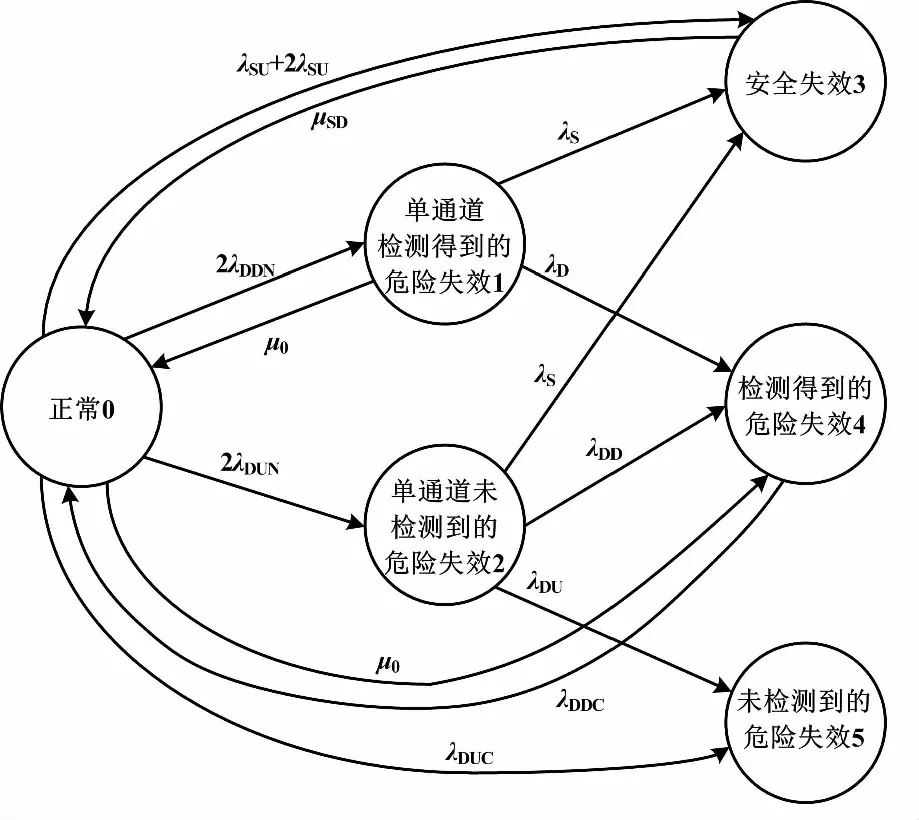
圖1 1oo2系統(tǒng)狀態(tài)轉(zhuǎn)移模型
在狀態(tài)0,兩個(gè)通道都可以正常運(yùn)行。在狀態(tài)1和狀態(tài)2,一個(gè)通道發(fā)生危險(xiǎn)失效,但另一個(gè)通道仍可執(zhí)行安全功能,系統(tǒng)仍處于安全狀態(tài)。另外,狀態(tài)1的危險(xiǎn)失效被檢測(cè)到后可以進(jìn)行在線修復(fù),以修復(fù)率μ0回到狀態(tài)0。狀態(tài)3、狀態(tài)4、狀態(tài)5都是系統(tǒng)失效狀態(tài):狀態(tài)3表示系統(tǒng)發(fā)生安全失效,狀態(tài)4表示系統(tǒng)發(fā)生檢測(cè)得到的危險(xiǎn)失效,狀態(tài)5則代表系統(tǒng)發(fā)生未檢測(cè)到的危險(xiǎn)失效。當(dāng)發(fā)生共因失效時(shí),系統(tǒng)從狀態(tài)0直接跳轉(zhuǎn)到狀態(tài)4或狀態(tài)5。狀態(tài)轉(zhuǎn)移矩陣P如式(2)所示。其中,∑表示矩陣元素所在行除該元素外其他元素之和[12]。
(2)
轉(zhuǎn)移矩陣P的元素Pij代表在一個(gè)時(shí)間段里,系統(tǒng)由狀態(tài)i轉(zhuǎn)移到狀態(tài)j的概率。定義初始狀態(tài)向量S0。該向量在1oo2結(jié)構(gòu)中為6維,代表系統(tǒng)共有6種狀態(tài)。若系統(tǒng)初始狀態(tài)正常,則S0=[1 0 0 0 0 0]。經(jīng)過一個(gè)時(shí)間間隔,系統(tǒng)處于各狀態(tài)的概率向量S1=S0P。經(jīng)過兩個(gè)時(shí)間間隔后,系統(tǒng)處于各狀態(tài)的概率向量S2=S1P。以此類推,Sn=Sn-1P或Sn=S0Pn。顯然,系統(tǒng)越復(fù)雜,存在的狀態(tài)數(shù)越多,狀態(tài)向量S的維數(shù)越多,轉(zhuǎn)移矩陣P越復(fù)雜,求解P的n次冪時(shí)花費(fèi)的時(shí)間也指數(shù)倍增加。
假設(shè)第6個(gè)狀態(tài)為未檢測(cè)到的危險(xiǎn)失效狀態(tài)、第5個(gè)狀態(tài)為檢測(cè)到的危險(xiǎn)失效狀態(tài)、第4個(gè)狀態(tài)為安全失效狀態(tài),則定義危險(xiǎn)失效向量Vd=[0 0 0 0 1 1]T,安全失效向量Vs=[0 0 0 1 0 0]T。假設(shè)測(cè)試周期T為一年,約為8 760 h。經(jīng)過i小時(shí)后,系統(tǒng)狀態(tài)向量Si、要求時(shí)失效概率di為:
Si=S0Pi,i=1,2,...,8 760
(3)
di=S0PiVd,i=1,2,...,8 760
(4)
平均要求時(shí)失效概率為:
(5)
通過式(5),分別計(jì)算出安全儀表功能中傳感器、邏輯單元、最終元件的平均要求時(shí)失效概率。由式(1)可求得所在SIF平均要求時(shí)失效概率,從而得到SIL等級(jí)。
2 Markov模型法優(yōu)化分析
2.1 Markov模型法時(shí)間復(fù)雜度分析
(6)
由式(6)可知,隨著T和n取值的增大,計(jì)算時(shí)間將呈指數(shù)上升。而T的取值通常大于8 760。這也是目前Markov模型法在SIL驗(yàn)證中應(yīng)用較少的原因。對(duì)于大型安全儀表系統(tǒng),出于時(shí)間成本考慮,一般會(huì)選擇其他方法。
2.2 Markov轉(zhuǎn)移矩陣冪運(yùn)算優(yōu)化
由式(6)可知,時(shí)間開銷主要來(lái)自矩陣高次冪的累計(jì)求和。而由矩陣?yán)碚摽芍绻疥嚳梢韵嗨茖?duì)角化,則存在對(duì)角矩陣D和可逆矩陣U,使P=UDU-1成立。Pi可由式(7)計(jì)算:
Pi=(UDU-1)i=UDU-1UDU-1×...×UDU-1=UDiU-1
(7)
對(duì)角矩陣D的元素對(duì)應(yīng)轉(zhuǎn)移矩陣P的特征值λ,因此Pi的計(jì)算就簡(jiǎn)化為求P的n個(gè)特征值λ1、λ2、...、λn的i次冪。式(8)為優(yōu)化后算法計(jì)算平均要求時(shí)失效概率時(shí)的計(jì)算式。
i=1,2,...,8 760
(8)
該算法的時(shí)間復(fù)雜度為:

(9)
相比式(6)中的O(T2n3),優(yōu)化后的時(shí)間復(fù)雜度顯著降低。隨著系統(tǒng)冗余程度的提高和測(cè)試周期的提高,即n和T越大,算法效率提升越明顯。但要使上面的結(jié)論成立,需要證明Markov轉(zhuǎn)移矩陣可以相似對(duì)角化。
2.3 證明轉(zhuǎn)移矩陣可相似對(duì)角化
矩陣可相似對(duì)角化的定義為:n階方陣存在n個(gè)線性無(wú)關(guān)的特征向量。該問題可轉(zhuǎn)化為求證方陣特征值互異。
(10)
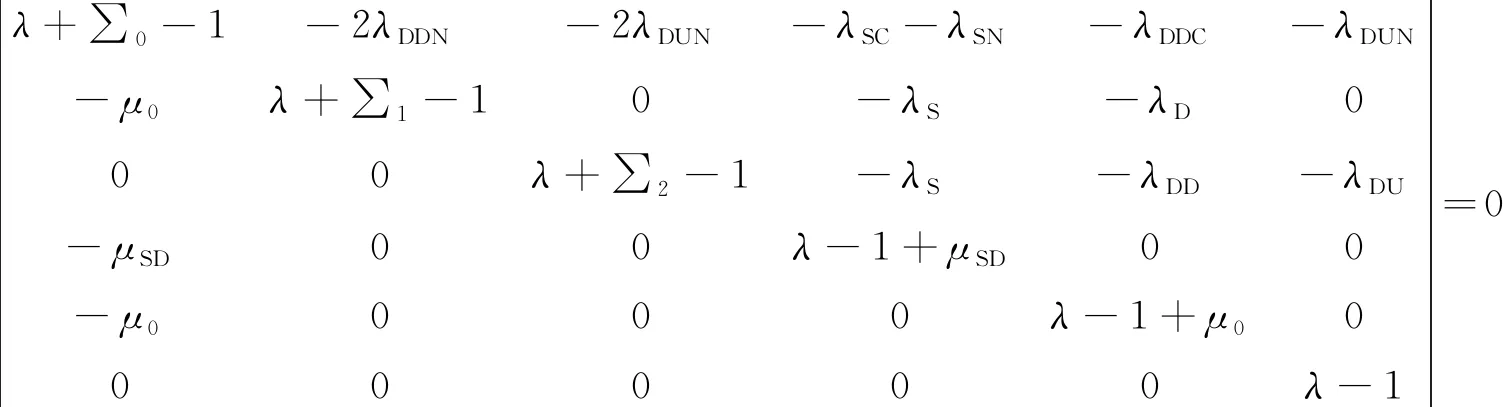
考慮式(10)所示1oo1系統(tǒng)的轉(zhuǎn)移矩陣P,求解滿足特征方程|λE-P|=0的特征值λ,如式(11)所示。
(11)
式(11)化簡(jiǎn)可以得到特征方程,如式(12)所示。
(λ-1)[λ3+λ2(λDD+λS+μ0+μSD-3)+λ(λDμ0+λDμSD-2λD-λDμ0+λSμ0-2λS+μ0μSD-2μ0-2μSD+3)+λDμ0μSD-λDμ0-λDμSD+λD-λDDμ0μSD+λDDμ0-λSμ0+λS-μ0μSD+μ0+μSD-1]=0
(12)
由式(12)可知:P中的一個(gè)特征值λ1=1,λ2、λ3、λ4為方程剩余項(xiàng)的解,方程中λS、λD、λDD數(shù)量級(jí)范圍為10-8~10-5,危險(xiǎn)失效恢復(fù)率μ0、安全失效恢復(fù)率μSD分別為元件平均修復(fù)時(shí)間和裝置誤動(dòng)作重啟時(shí)間的倒數(shù),數(shù)量級(jí)范圍為10-2~10-1。將式(12)中失效參數(shù)按數(shù)量級(jí)合,并將特征方程簡(jiǎn)化為f(λ)=λ3+Aλ2+Bλ+C。令f(λ)=0,A、B、C近似取值范圍分別為(-2.927,2.833)、(2.671,2.855)、(-0.838,-0,928)。網(wǎng)格分區(qū)生成特征方程曲線族,均與x軸相交于三個(gè)不同點(diǎn),則λ2、λ3、λ4三個(gè)特征值互異。特征方程曲線如圖2所示。
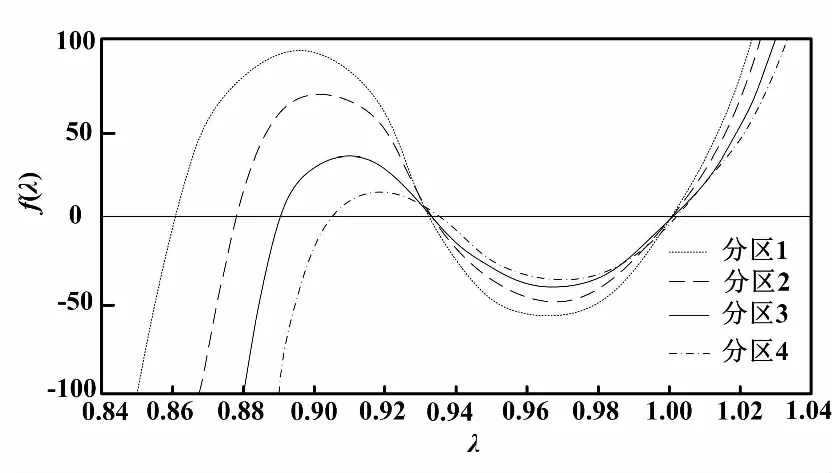
圖2 特征方程曲線
將λ=1代入三次特征方程,得:
1+λDD+λS+μ0+μSD-3+λDμ0+λDμSD-2λD-λDμ0+λSμ0-2λS+μ0μSD-2μ0-2μSD+3+
λDμ0μSD-λDμ0-λDμSD+λD-λDDμ0μSD+λDDμ0-λSμ0+λS-μ0μSD+μ0+μSD-1=0
(13)
式(13)化簡(jiǎn)結(jié)果為λDD=λD。根據(jù)表2中λDD=CdλD,而危險(xiǎn)覆蓋因子Cd<1,可知λDD<λD。
對(duì)于1oo2系統(tǒng)的六階轉(zhuǎn)移矩陣P,|λE-P|=0的特征值λ如式(14)和式(15)所示。
(14)
(15)
式中:∑0為第0行元素之和;∑1為平行元素之和;∑2為第2行元素之和。
為求證特征方程不存在特征值為1的重根,將λ=1代入式(15)中的行列式,化簡(jiǎn)得到特征多項(xiàng)式為:
Y=μ0μSD∑0∑1∑2-μ0μSD(2λDDNλD∑2+
2λDUNλDD∑1+∑2λDDC)
(16)
由表2可知:λDD<λD,λDDC<λD,λDDN<λD,λDUN<λD。因此,在λD<0.1時(shí),式(16)可化簡(jiǎn)為:

(17)
綜上可知,特征方程式(12)、式(14)不存在值為1的重根,即λ1、λ2、λ3、λ4互異。
由此證得上述Markov狀態(tài)轉(zhuǎn)移矩陣P可相似對(duì)角化。
3 試驗(yàn)分析
3.1 天然氣集氣站安全儀表系統(tǒng)數(shù)據(jù)
試驗(yàn)采用四川地區(qū)某天然氣集氣站的安全儀表系統(tǒng)可靠性參數(shù)。該集氣站共劃分為15個(gè)安全儀表功能,分別執(zhí)行火災(zāi)關(guān)斷、進(jìn)站高高壓力切斷、進(jìn)站低低壓力切斷和污水系統(tǒng)低液位關(guān)斷的安全功能。本次試驗(yàn)選取其中最具代表性的5個(gè)安全儀表功能。傳感器、最終元件、邏輯單元的可靠性參數(shù)分別如表3、表4及表5所示。

表3 傳感器的可靠性參數(shù)
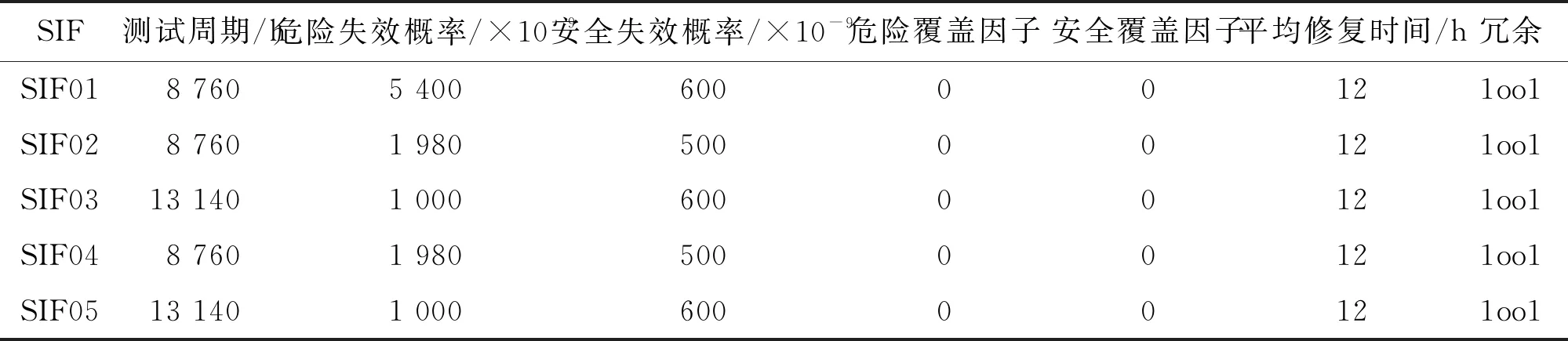
表4 最終元件的可靠性參數(shù)
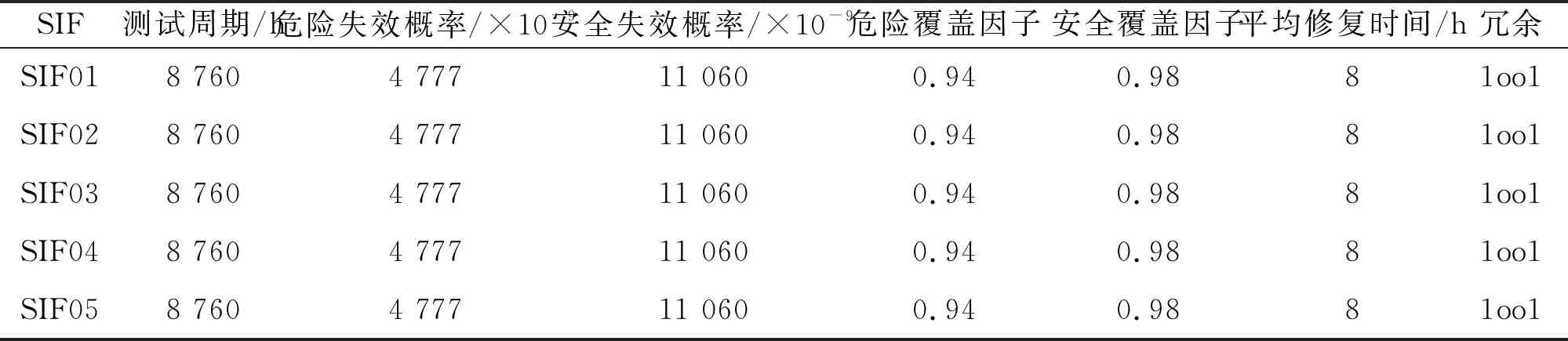
表5 邏輯單元的可靠性參數(shù)
3.2 兩種方法結(jié)果對(duì)比
分別使用原始Markov模型法和R-Markov模型法計(jì)算5組SIF的平均要求時(shí)失效概率,分析比較兩種方法花費(fèi)的時(shí)間和計(jì)算結(jié)果。每組數(shù)據(jù)分別進(jìn)行10次試驗(yàn),時(shí)間取平均值。為消除干擾因素,只計(jì)算兩種方法核心算法耗時(shí),不考慮構(gòu)建Markov轉(zhuǎn)移矩陣等公共計(jì)算開銷。兩組試驗(yàn)均在相同軟件、硬件環(huán)境下進(jìn)行。兩種方法計(jì)算結(jié)果如表6所示。

表6 兩種方法計(jì)算結(jié)果
3.3 系統(tǒng)冗余度和測(cè)試周期T的影響
從式(6)、式(9)所示兩種方法的計(jì)算復(fù)雜度可知,相比R-Markov模型法,Markov模型法耗時(shí)對(duì)轉(zhuǎn)移矩陣階數(shù)(即系統(tǒng)冗余度)和測(cè)試周期更為敏感。通過一組試驗(yàn),分別驗(yàn)證系統(tǒng)冗余結(jié)構(gòu)和測(cè)試周期對(duì)計(jì)算時(shí)間的影響。試驗(yàn)數(shù)據(jù)采用表3中SIF02的傳感器可靠性參數(shù),僅計(jì)算傳感器的要求時(shí)失效概率。設(shè)定測(cè)試周期為8 760 h、13 140 h和17 520 h,分別在1oo1、1oo2、2oo3條件下進(jìn)行運(yùn)算。單元件運(yùn)算結(jié)果對(duì)比如表7所示。冗余結(jié)構(gòu)和測(cè)試時(shí)間對(duì)效率提升的影響如圖3所示。

表7 單元件運(yùn)算結(jié)果對(duì)比
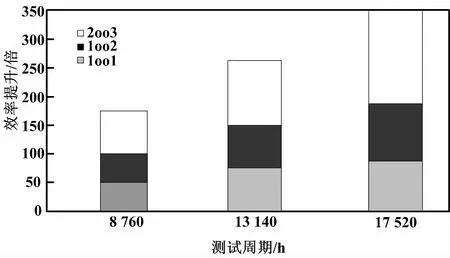
圖3 冗余結(jié)構(gòu)和測(cè)試時(shí)間對(duì)效率提升的影響
3.4 結(jié)果分析
分析表6、表7數(shù)據(jù)和圖3可得如下結(jié)果。
①R-Markov模型法在5組SIF可靠性數(shù)據(jù)上提高約48~80倍效率。該計(jì)算結(jié)果和Markov模型法完全一致。
②結(jié)合表6中的時(shí)間比和表3~表5中各SIF回路的可靠性數(shù)據(jù)可知,SIF02、SIF03、SIF05中部分元件使用了更長(zhǎng)的測(cè)試周期和更復(fù)雜的冗余結(jié)構(gòu),此時(shí)優(yōu)化后算法的執(zhí)行效率有更顯著的提高。
③由表7和圖3可知,Markov模型法計(jì)算效率對(duì)系統(tǒng)冗余結(jié)構(gòu)和測(cè)試周期非常敏感,而R-Markov模型法的計(jì)算耗時(shí)始終能控制在非常低的水平。隨著冗余結(jié)構(gòu)和測(cè)試周期的提高,兩者計(jì)算時(shí)間的比值也顯著增加。當(dāng)測(cè)試周期為一年時(shí),R-Markov模型法在3種冗余結(jié)構(gòu)上計(jì)算效率分別提高至51.1、51.9和77.2倍。當(dāng)測(cè)試周期為一年半時(shí),計(jì)算效率則提高至70.7、72.4和118.6倍。當(dāng)測(cè)試周期為兩年時(shí),計(jì)算效率達(dá)到了91.5、94.6和164.3倍。隨著測(cè)試周期的進(jìn)一步增加,這一差距將會(huì)更加明顯。
4 結(jié)論
本文在Markov模型法的基礎(chǔ)上,提出了一種新的驗(yàn)算安全儀表系統(tǒng)SIL的方法,解決了Markov模型法計(jì)算量大、計(jì)算時(shí)間長(zhǎng)的缺陷。通過數(shù)學(xué)原理,證明了該方法的可行性。本文采用真實(shí)天然氣集氣站的安全儀表系統(tǒng)可靠性數(shù)據(jù)進(jìn)行了兩組對(duì)比試驗(yàn)。試驗(yàn)結(jié)果表明,在不同的冗余結(jié)構(gòu)和測(cè)試周期條件下,R-Markov模型法將SIL驗(yàn)算的計(jì)算效率提高了48~160倍。分析試驗(yàn)數(shù)據(jù),R-Markov模型法即使用于大型復(fù)雜系統(tǒng)的SIL驗(yàn)算任務(wù),最終運(yùn)算時(shí)間也可控制在10 s內(nèi),為大型化工處理廠批量SIL驗(yàn)算工作提供了高效的解決方案。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
