自適應Radon單像素成像
2021-10-04 11:46:40王蔚松吳洪波王靈杰劉銘鑫趙尚男
光學精密工程 2021年8期
關鍵詞:區域
王蔚松,吳洪波,王靈杰,劉銘鑫,趙尚男,張 新*
(1.中國科學院 長春光學精密機械與物理研究所光學系統先進制造技術重點實驗室,吉林 長春 130033;2.中國科學院大學,北京 100049)
1 引 言
單像素成像(Single Pixel Imaging,SPI)作為新興的計算成像技術,其利用結構光調制,僅使用一個不具備空間分辨能力的單像素探測器實現成像,能夠感知微弱光強的變化,具有很高的探測效率[1],隨著硬件性能的提升,且價格相較于面陣探測器更便宜,SPI在不可見光波段如紅外、X、熒光、太赫茲波段具有優勢。SPI能夠在時間維度上編碼空間信息[2],記 錄一維的光強信號,因此具有極高的時間分辨率,可應用于時間域的成像[3]或發展超快成像領域[4-5]。
單像素成像是通過犧牲時間換取空間的成像方法,對場景需要進行大量的采樣。采樣的結構光基底分為非正交基底和正交基底,通過參考光(結構光)與信號光之間的關聯運算進行成像[6–8]。使用隨機散斑或者二進制圖案作為非正交基底對光場進行編碼,需要遠大于重建圖像分辨率的采樣次數才能夠恢復清晰的圖像[9-10],比 如Sun使 用 了106種隨機圖案進行了百萬次測量來重建分辨率為256×192的圖像[11]。即使使用空間光調制器件加快了調制速率,采樣數量和成像時間仍是限制單像素成像技術應用的重要因素。壓縮感知技術指出,低于奈奎斯特采樣頻率的信號也能夠恢復原始信號[12],基于壓縮感知算法的單像素成像算法極大的降低采樣次數,并且能夠恢復低噪聲和高質量的圖像[13-16]。但隨之帶來較長的重建時間依然限制了成像效率。
此時一些具有正交性的感知矩陣進入研究人員的視野。根據變換基底的不同,產生了基于小波變換[17-18]、離散余弦變換[19]、傅里葉變換[20-22]、哈達瑪變換[23-25]等單像素成像技術,在數學上促進了各成像領域之間的融合。單采樣的次數等價于圖像分辨率大小,因此仍表現為低幀速率成像。為降低采樣次數,Bian提出的eSPI方法,提取并恢復頻域占比最大的區域,將采樣數量降低了兩個數量級[26],Shi等人在稀疏傅里葉單像素成像的基礎上結合了壓縮感知技術,在降低采樣數量的同時提高了成像的質量[27]。實際上,場景中的有效信息僅占場景的一部分,Sun等人使用小波變換提取目標中的感興趣區域,并使用哈達瑪單像素成像方法對感興趣區域進行高分辨率重建[17],其屬于多分辨率成像的范疇;Ji‐ang等人通過傅里葉切片定理定位一個目標區域,并在目標區域自適應的進行傅里葉單像素成像,降低了采樣圖案的數量[28],但只能夠對單一目標成像;Shi給出了使用Hadamard變換實現目標邊緣定位的方案,具有極高的檢測速度[29],但需要背景信息作為先驗,并且沒有實現目標區域的成像。
Radon變換建立了物體內部元素與投影數據之間的聯系,Harald最早將Radon變換用于單像素成像[30],但使用旋轉的機械結構和標線圓盤提取Radon變換系數會產生較大的誤差,且標線圓盤靈活性差;Shi通過空間光調制器產生的結構光對整個場景進行調制,實現了Radon單像素成像(Radon Single-Pixel Imaging,RSI)[31],需要等同于圖像分辨率的采樣次數才能夠實現高質量成像。本文在Radon單像素成像的基礎上,提出了自適應Radon單像素成像方法(Adaptive Ra‐don Single-Pixel Imaging,ARSI),使用Radon投影變換定位目標區域的基礎上,匹配的基底圖案大小,對目標區域進行單像素采樣和重建,提高了單像素成像的成像效率。
2 基本原理
2.1 基于ARSI的目標區域定位
如圖1(a)所示,場景的分辨率為256×256,場景中的有效信息僅集中在矩形框中,我們稱之為目標區域。使用傳統的單像素成像方法,在不結合壓縮感知技術的前提下,至少需要256×256次采樣,才能夠清楚地重建整幅場景圖片,以保證目標區域成像質量。實際上,背景中基本包含很少量的信息,在采樣過程中可以被忽略,因此僅對目標區域進行采樣與重建能夠大量減少單像素成像的采樣數量。ARSI方法的關鍵問題分為使用目標區域的定位與重建。
Radon變換可被描述為:給定圖像Radon變換是圖像沿給定角度的線積分[32],也被形容為圖像在給定方向上的投影。Radon變換的數學表達式為:
L是xOy面上的直線,s是原點到L的距離,θ是L的法線與x軸正向的交角。s和θ是直線L的位置參數,給定s和θ時L被唯一確定。r(s,θ)的集合被稱為f(x,y)的Radon變換,其中項δ是狄拉克分布函數。
根據Radon投影變換定理,圖像在不同方向的投影積分曲線表現出不同的分布特征,這是ARSI定位目標區域的依據,因此我們分別提取圖像在x方向和y方向的投影曲線,此時θ=0和
圖1(b)為圖像在x方向的投影分布r(s)θ=0,圖1(c)為圖像在y方向的投影分布r(s)θ=π/2。目標區域的能量分布與背景具有顯著的差別,通過邊緣檢測[33]能夠得到目標區域的邊界點(x1,y1)(x2,y1)(x1,y2)(x2,y2),目標區域的中心坐標為,記為M(xr,yr)。圖1(d)為場景的Radon投影變換,紅色曲線為四個邊緣點的Radon投影結果,每一個點的投影軌跡都表現為正弦分布,并且目標區域Radon投影變換后,其能量分布集中在四條正弦曲線限制的范圍內。
圖1 目標區域定位方法Fig.1 Target region positioning method
場景圖像f(x,y)的大小為N×N,實現單像素成像的Radon投影變換基底模式為:

其作用為提取圖像在給定直線L(s,θ)上的所有像素點,遍歷所有的s和θ即可獲得圖像Ra‐don投影變換。而P(s,θ)在空間光調制器上表現為“亮”直線,編碼方式雖然簡單,但是每次僅獲取一條直線上的像素點,SLM的運用效率極低,且獲取的光強值極小。本文結合Hadamard變換,使用統計學原理獲取圖像在不同方向上的投影能量[31,29]。Radon-Hadamard(R-H)基底為:
其中,H-1{}表示哈達瑪變換,Tθ表示旋轉因子。Radon-Hadamard模式基底圖案如圖2所示,圖2(a)(b)分別為獲得圖像在x和y方向的投影模式圖案,選取i=3階Radon-Hadamard示例以簡要顯示。
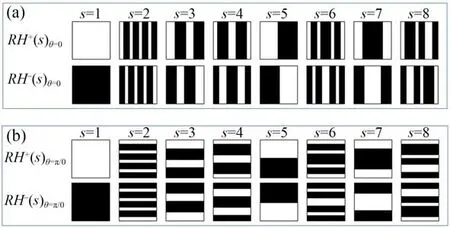
圖2 三階Radon-Hadamard基底圖案Fig.2 Third-order Radon-Hadamard basis pattern
使用Radon-Hadamard基底對場景圖片的采樣獲得的測量值為:

D+和D-分別為單像素探測器獲得的測量值,差分的測量方式能夠有效的抑制噪聲[24],通過R-H模式獲取的Radon投影變換域的系數為:

當θ=0和θ=π/2則能夠獲得圖1(b)和圖1(c)對應的投影曲線。考慮到Radon變換的周期特性,全采樣需要的角度范圍是[0,π),因此對整個場景進行全采樣所需的模式圖案數量為Np=2×m×N,m為投影方向的數量(m=π/Δθ,Δθ為角度的采樣間隔)。
如圖3(a)所示,ARSI通過投影定位出目標區域,僅對目標區域進行單像素采樣和成像,能夠很大程度降低測量次數。如圖3(b)所示,我們計算目標區域的中心坐標為M(xr,yr),選取與目標區域大小接近的Radon-Hadamard模式作為采樣圖案,新的R-H模式大小為n×n(n=2i,n≤N),小于場景分辨率N×N。更新后的目標區域大于原始目標區域,降低了對初始目標區域定位的精度要求。此時所單像素成像需要的采樣數量為Np=2×m×n。R-H模式變為:
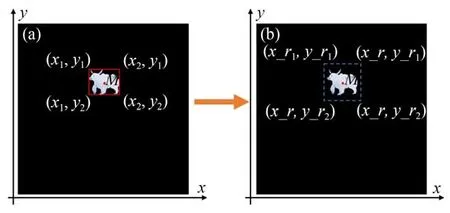
圖3 匹配目標區域Fig.3 Matched target region

目標區域的Radon變換域為:

其中s_r為目標區域的投影坐標,更新后的目標區域大小為n×n,中心坐標不變,此時目標區域的范圍變為:

圖4為ARSI對目標區域Ω(x,y)的采樣過程,通過單像素成像方法,使用圖4(c)中不同的R-H模式圖案調制目標區域,能夠獲取如圖4(d)所示的Radon變換域。
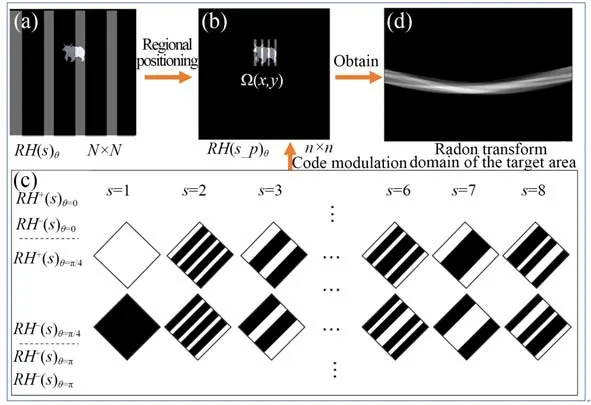
圖4 場景全采樣和目標區域采樣:(a)目標區域定位;(b)目標區域采樣;(c)不同的R-H模式圖案;(d)目標區域的Radon變換Fig.4 Full sampling of the scene and sampling of the tar‐get region:(a)Target region positioning;(b)Tar‐get region sampling;(c)Different R-H pattern pat‐terns;(d)Radon transform of the target region
我們定義目標區域和場景區域的采樣壓縮比為:

其中,t為目標個數。
2.2 圖像重建
濾波反投影算法用于重建圖像,其多用于計算機斷層成像領域,能夠將圖像信息從Radon變換域轉為空間域,其表達式為:
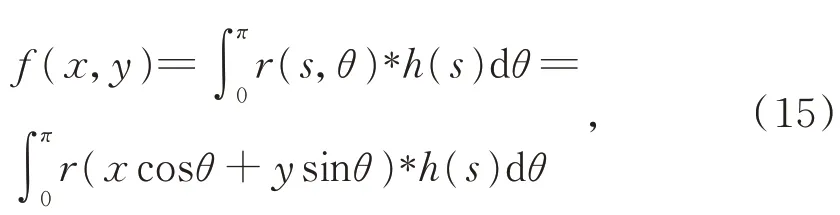
r(s,θ)為單像素方法獲取的Radon變換域,h(s)為濾波器函數,當不存在h(s)時,公式(15)為直接反投影的過程,f(x,y)中會存在星狀偽影,造成圖像質量的下降。本文采用Hamming濾波函數,避免了大量的正弦、余弦計算,所重建圖像輪廓清楚。目標區域的單像素成像結果為fr(x,y):

為獲得還原目標在場景中的位置,將目標區域與背景融合,使最終的重建場景與原場景具有相同的分辨率(N×N),坐標轉換公式為:
3 成像分析
圖5為ARSI方法,圖5(a)為ARSI方法的組成結構,主要包括單像素成像硬件和ARSI算法;圖5(b)為實現ARSI的光路結構,光路類型為前調制型單像素成像光路[20],選用數字投影儀器(Digital Projector,DLP)作為SLM用于產生編碼圖案,DLP生成時間變化的編碼R-H模式序列用于照明場景,生成速率5 000 Hz,反射光經過焦距為125 mm的聚光透鏡,光電二極管作為單像素探測器,數據采集設備(DAQ)用于數據采集和信號轉換,計算機用于控制和處理數據,物體距離透鏡0.5 m。
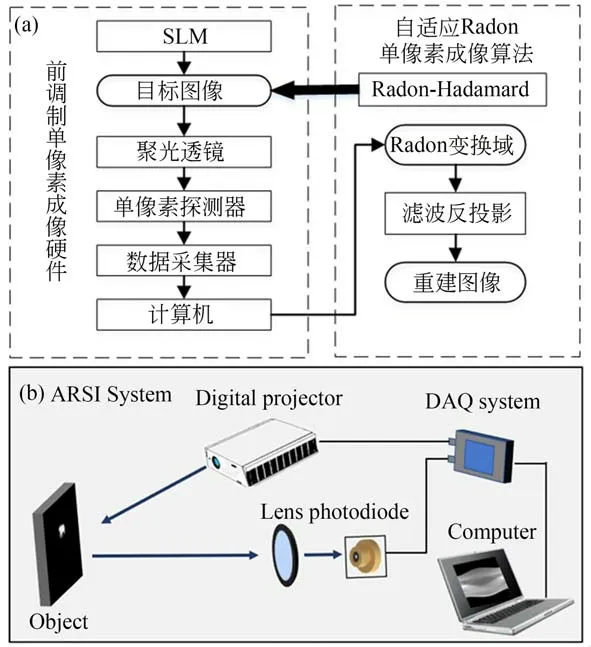
圖5 ARSI方法Fig.5 ARSI method
3.1 單目標ARSI
我們繼續使用“小牛”圖驗證ARSI算法,重建場景分辨率為256×256,如圖6所示,根據投影定位算法,圖6(a)為計算出目標區域的邊界,其中心坐標為M(129,168),選取64×64的R-H模式圖案,因此更新后的目標區域如圖6(b)所示,采樣壓縮比為25%。
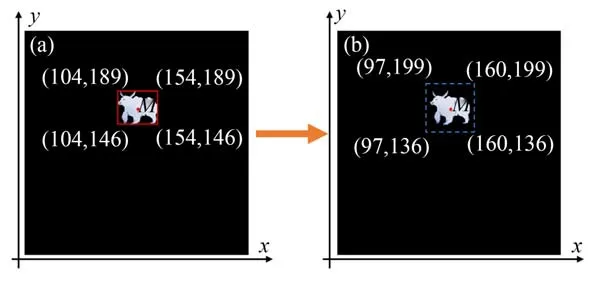
圖6 目標區域定位與R-H模式匹配Fig.6 Target region positioning and R-H pattern match‐ing
R-H模式基底采樣時,設置角度間隔為1°,因此m=180。通過一系列不同的R-H模式圖案對目標區域進行采樣,以獲取Radon變換域系數,再通過濾波反投影方法重建目標區域圖像,通過圖像融合最終獲得重建后的場景,如圖7所示,添加結構相似性系數以客觀評價圖像重建結果[35],以研究重建目標區域與原始目標區域之間的差別。
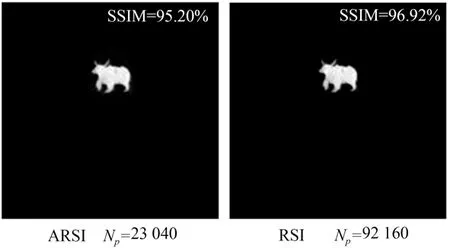
圖7 ARSI成像結果Fig.7 ARSI imaging results
ARSI的采樣次數為23 040,RSI的采樣次數為92 160,ARSI的采樣次數為RSI的1/4,成像效率提升4倍,但最終的成像質量相同,證明了ARSI在降低采樣數量的同時,還能夠保證成像的質量。實驗對真實“小鴨子”場景進行ARSI,重建場景分辨率為256×256。根據ARSI定位,128×128的Radon-Hadamard的模板對目標區域進行采樣,采樣壓縮比為C=50%,角度間隔為1°,實驗結果如圖8所示,對于大目標區域的重建依舊表現出較高的成像質量,成像效率是全采樣條件下2倍。
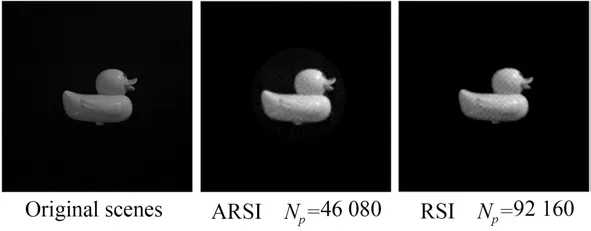
圖8 大目標區域ARSI成像結果Fig.8 ARSI imaging results of a large target region
實驗還設置了相同采樣次數的條件下,RSI和ARSI成像質量的對比,分別設置n=32,64,128,256大小的R-H模式圖案執行RSI和ARSI,實驗結果如圖8所示。當R-H模板僅為32×32時,其小于目標區域的大小,矩形區域放大后顯示,目標區域大部分特征得以恢復但邊緣信息丟失,ARSI重建的目標區域不完整,此為R-H模式大小不匹配的重建結果。此時RSI重建質量非常差,無法識別目標區域特征信息。隨著R-H模式大小匹配目標區域,R-H模式分辨率小于圖像分辨率時,RSI無法實現全采樣,重建圖像的質量明顯低于ARSI,實驗證明了當壓縮率小于100%時,ARSI有效提高了單像素成像的成像效率。
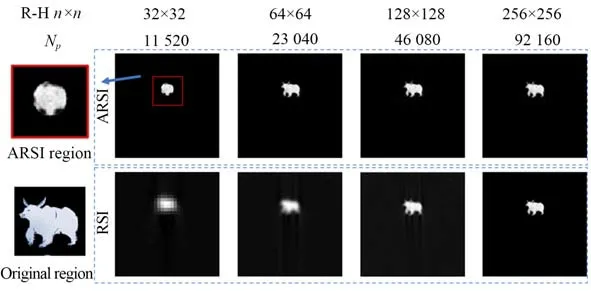
圖9 RSI和ARSI成像 對比Fig.9 RSI and PRSI imaging comparison
3.2 多目標ARSI
在已知具有三個目標區域的情況下,使用ARSI尋找目標區域的位置坐標。如圖10所示,設置了三種不同位置分布的場景,重建場景分辨率為256×256,分別為:(a)三個“小牛”的橫縱坐標互不混疊,在x方向和y方向上的投影具有三個明顯的特征峰分布,因此能夠準確定位出三個目標區域的位置;在圖10(b)中,“小牛2”和“小牛3”橫坐標重疊,其投影的特征峰發生混疊,三個“小牛”在x方向上僅表現出兩個特征峰,但在y方向上的投影互不影響,明顯區分其坐標位置,因此依然能夠定位三個目標位置;圖10(c)中,“小牛1”和“小牛2”縱坐標重疊,“小牛2”和“小牛3”橫坐標重疊,在x和y方向上都表現出兩個特征峰,尤其是peak-2其投影的能量值大于peak-1,且peak-2的 寬 度 大 于peak-1,這表示peak-2為兩個目標合成的特征峰,但無法區分二者的位置,我們添加了y=x方向的投影分布,在該方向上能夠準確區分三個特征峰,借助三個方向的投影曲線,能夠精準定位三個目標區域的中心坐標。圖10(c)定位所需的R-H基底的采樣次數為1 536次,使用SLM調制花費極少的時間。
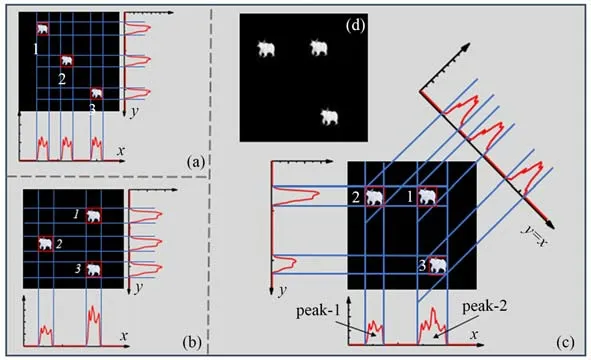
圖10 多目標定位和成像Fig.10 Multi-target positioning and imaging
圖10(c)為多目標區域的重建結果,R-H模板大小為64×64,分別對三個區域進行成像,然后融合背景信息還原場景,全采樣所需的采樣數量 為92 160,ARSI采樣次數為3×2×64×180=69 120,采樣壓縮比C=75%。該實驗驗證了ARSI具有對場景內多目標圖像定位和重建的能力,其所需的采樣數量少于全采樣條件下的采樣數量。
3.3 局限性
本文所提出的方法也具有局限性,實驗場景的背景信息過于簡單,當目標區域位于復雜的場景中時,其定位難度將增加;Hadamard變換的對象只能為2i大小,限制了目標區域范圍,但如果不考慮探測效率,使用高靈敏度的單像素探測器,可以僅通過線編碼獲取Radon變換域;對于多個目標區域的定位,目標區域之間距離不能過小,否則會造成解糾纏困難,產生定位誤差。ARSI在多目標區域定位中具有潛在能力,通過更改Radon-Hadamard模式尺寸使其應用于場景的多分辨率成像,未來結合深度學習提升其在復雜目標和場景下的應用能力。
4 結 論
本文提出使用Radon投影變換實現目標區域定位和成像的技術。在有效信息僅占場景一部分的情況下,使用水平和垂直的Radon-Had‐amard模式作為采樣的基底圖案,定位目標區域的中心位置和計算其大小范圍。選用匹配分辨率的基底圖案對目標區域進行重建,ARSI所需的采樣數量遠小于全采樣的采樣數量,且能夠保證重建圖像質量,提高了單像素成像的成像效率。另外嘗試了多目標實驗,通過增加投影方向,ARSI能夠定位并成像多個目標區域,可應用于多目標探測領域。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
