基于RSSI高斯濾波的人工蜂群定位算法*
2021-09-29 10:11:40單好民陳才學
傳感技術學報 2021年7期
關鍵詞:優化
單好民,陳才學
(1.浙江郵電職業技術學院人工智能學院,浙江 紹興 312366;2.湘潭大學信息工程學院,湖南 湘潭 411105)
無線傳感網絡(Wireless Sensor Networks,WSNs)是由在特定區域部署的微型傳感節點組成的網絡。這些節點感知環境數據,再將數據傳輸至匯聚節點。收到數據后,匯聚節點對數據進行分析,進而實現對環境的監測目的。位置信息對監測活動至關重要。只有確定了節點位置,感測的數據才具有參考價值[1]。因此,定位技術成為WSNs的關鍵技術之一。
依據定位過程中是否需要測距,將現存的定位算法可分為基于測距定位算法和基于非測距定位算法。相比于非測距算法,基于測距定位算法精度較高。常見的測距算法有:接收信號強度指標(Received Signal Strength Indication,RSSI)、信號到達時間(Time of Arrival,ToA)、到達角度(Angle of Arrival,AoA)等。與ToA和AoA不同,基于RSSI測距無需額外的測量設備,易實現。
目前,現存多數基于RSSI的定位算法采用降低RSSI的測距誤差提高定位精度。如文獻[2]提出基于卡爾曼濾波的RSSI值優化算法。文獻[3]提出基于人工神經網絡的RSSI值處理算法,但是該算法需要大量的RSSI數據。文獻[4]提出基于路徑損耗傳播模型優化的濾波方法,通過優化加權參數,減少測距誤差。文獻[5]提出基于稀疏傅里葉和RSSI測距的低復雜RSSI定位算法(Spare Fourier-RSSI Positioning,SFRP)。SERP算法通過稀疏傅里葉方法篩選性能較好的錨節點參與定位,降低參與定位的錨節點個數,進而降低算法的復雜度。
近些年來,隨著節點計算能力的提升,智能優化算法被廣泛應用于節點定位[6]。例如,文獻[7]提出基于雞群優化的定位算法。利用雞群優化算法估計節點的位置;文獻[8]提出的混沌粒子群雞群融合算法的RSSI質心定位算法(RSSI Centroid Location algorithm Optimized by Chaos Particle Swarm Chicken Swarm Fusion Algorithm,RCCF)。RCCF算法在使用PSO算法的基礎上利用混沌優化思想避免搜索過程陷入局部極小,再利用雞群算法進一步搜索最優解。文獻[9]提出基于改進的布谷鳥優化的節點定位算法,提高搜索節點位置的效率;
文獻[10]提出粒子群優化的節點定位算法。先建立目標函數,再利用粒子群優化算法求解目標函數,進而獲取節點位置。這些啟發優化算法將定位問題轉化為目標優化問題,再利用優化算法求解。相比于傳統的定位算法,這些算法具有較高的定位性能,但是這些算法仍存在收斂速度慢問題。
為此,提出基于RSSI高斯濾波的人工蜂群定位(RSSI Gaussian Filter-based Artificial Bee Colony Localization,RGBL)算法。該算法先建立RSSI測距模型,再利用高斯濾波對RSSI值進行優化處理。然后,利用人工蜂群算法搜索節點位置。仿真結果表明,提出的RGBL算法有效地提高了定位精度,提升算法的收斂速度。
1 RSSI測距模型及測距誤差分析
1.1 測距模型
RSSI值與信號傳播模型密切相關,而不同環境下的傳播模型也不盡相同。通常,在實際環境中采用Shadowing模型:

式中:d表示收發兩端間的距離,如圖1所示。η表示路徑衰減指數;χ表示附加的衰減因子[11];d0表示發送端與接收端相距1 m時的信號損耗;P(d)表示信號傳輸dm時所發生的損耗。
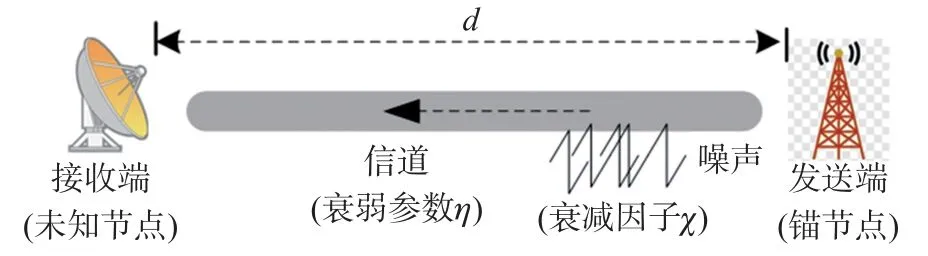
圖1 信號傳輸模型
依式(2)也能計算P(d):

式中:Pinit表示節點發射的初始信號強度;RSSI(d)表示在離發送端相距d時,接收端所接收的信號強度值。
結合式(1)和式(2)可得:

式中:A表示接收端從相距1 m處所接收的信號強度。
1.2 測距誤差分析
在基于RSSI測距階段,錨節點發射信號,其包含錨節點的ID號和位置信息;未知節點接收發射信號。所謂錨節點是指已知自身坐標信息的節點;未知節點是指需要估計位置坐標的節點。
利用式(3)估計距離:


表1 不同環境下的A和η的取值
從表1可知,不同環境下的A和η值差別較大。因此,RGBL算法將在給定環境下多次測量,獲取多個RSSI值,再利用高斯濾波對RSSI值進行處理,剔除誤差較大的RSSI值。再將剩余的低誤差的RSSI值估計距離,進而提高定位精度。
2 RGBL算法
n個節點隨機分布于二維(2-D)網絡,其中錨節點所占的比例為a%。令θi=(xiyi)表示第i個未知節點的坐標;令表示第k個錨節點坐標。RGBL算法主要由基于高斯濾波的RSSI測距和基于人工蜂群優化的定位兩個階段構成。
2.1 基于錨節點位置信息的參數估計
由表1可知,不同環境下的A和η的參數不同。目前基于RSSI測距模型常采用一些經驗值,如η一般取2~5。這種憑經驗取值,并沒有考慮真實環境。因此,RGBL算法采用實時估計A和η參數。
對于未知節點i,它就從周圍選擇三個錨節點。首先從未知節點i的一跳范圍內選擇離自己最近三個錨節點。原因在于:離自己距離越短,依據RSSI測距的估計值越準確。
若一跳范圍內沒有三個錨節點,就擴大范圍,從二跳范圍內搜索,依次類推,直到搜索到三個錨節點。為什么要從節點i的鄰近環境內搜索?原因在于:同一個環境下A和η參數差別小。從節點i的鄰近環境內選擇錨節點,再利用這些錨節點已知的位置信息估計A和η參數,然后所估計的參數值去定位未知節點i。利用這種方式,可以減少因參數不準確所帶來的定位誤差[13]。
假定未知節點i選擇了三個錨節點:{a1,a2,a3}。這三個錨節點的位置坐標分別:,,,。然后依據式(5)計算計算錨節點a1離a2、a3的距離:
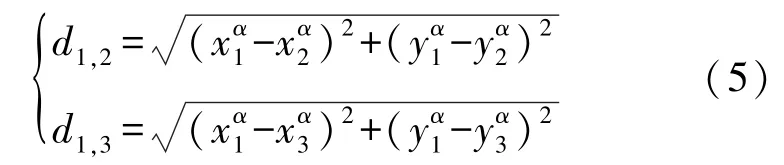
同時,錨節點a1記錄從錨節點a2、錨節點a3所接收的信號強度值(RSSI1,2,RSSI1,3)。再求解式(6)便可估計參數A和η:
2.2 基于高斯濾波的RSSI測距
即使在特定的環境下,未知節點所接收的RSSI值容易受環境變化,易產生較大誤差的RSSI值。為此,在定位之前,先利用高斯濾波對所接收的RSSI值進行處理,剔除誤差大的RSSI值,保留誤差低的值。
在特定環境下同一對收/發兩端進行多次測量,多次測量所獲取的RSSI值服從高斯分布(μ,σ2)。第j次接收的RSSI值(RSSIj)的概率密度函數[14]:


依據文獻[15],RSSIj值落入在區間(μ-σ,μ+σ)內的概率為:

因此,將未落入在區間內的RSSI值剔除,保留下的RSSI值用于測距。為此,設定一個二值變量bj。若RSSIj的概率Pj不小于0.682 6,則bj=1,否則為零:

再將m次測量的均值作為最后的RSSI值:

2.3 基于人工蜂群的節點定位
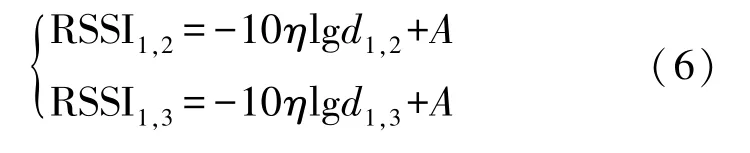
相比于粒子群等傳統的優化算法,人工蜂群算法的全局尋優能力更好。為此,RGBL算法將人工蜂群算法求解節點位置。在基于人工蜂群算法中,將未知節點作為未知蜜源;有效蜜源的位置就是未知節點位置的估計值[16]。人工蜂群算法中有三類蜂蜜:引領蜂,跟隨蜂和偵查蜂。
表2給出這三者之間的關系以及應用于定位系統中與節點間的關系[11]。
表2 人工蜂群算法與節點定位系統間對應關系
2.3.1 基于測距誤差的目標函數
先將未知節點的定位問題轉化為非線性方程組的求解問題,即建立目標函數。RGBL算法屬分布式算法,每個未知節點獨立運行算法。因此,每個未知節點構建一個目標函數。
令f(xi,yi)表示未知節點i的目標函數,其定義如式(11)所示:

式中:Na表示與未知節點i相關聯的錨節點數;表示通過式(4)所估計的未知節點i與錨節點k間的距離。
2.3.2 基于人工蜂群算法的目標函數求解
首先,初始化蜜蜂位置:

式中:i=1,2,…,M,其中M表示蜜蜂數量;j表示搜索空間的維數;Xmax,j,Xmin,j分別表示蜜蜂位置的上、下限。
第二步,引領蜂依據式(13)進行領域搜索,搜索最優位置:

式中:t表示當前迭代的次數;k表示不同于i的蜜源。
第三步,依據式(14)計算花粉量Ei,即將更新前/后的解進行對比。若更新后的Ei大于更新前的值,就對解進行更新,否則保留原解:

式中:fi表示蜜源i的目標函數值。即將Xi,j代入式(11)所得到的f(xi,yi)值。
第四步,其他蜜蜂以式(15)計算跟隨引領蜂的概率[13]:

第五步,如果位于某一位置的蜜蜂搜索次數達到最大迭代次數,式(13)所計算的值仍沒有變化,在這種情況下,引領蜂就拋棄此蜜源,并轉化為偵查蜂,并依式(21)開發新的蜜源。基于人工蜂群算法求解目標函數的流程如圖2所示。
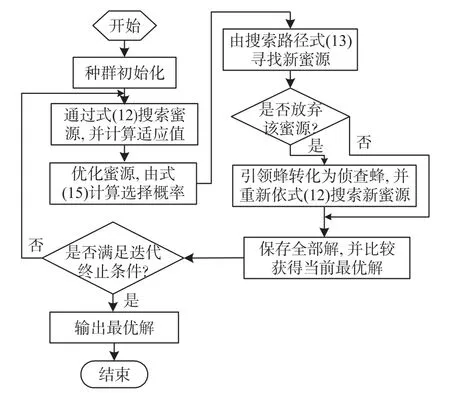
圖2 基于人工蜂群算法求解目標函數的流程
3 性能分析
3.1 仿真環境
利用MATLAB軟件建立仿真平臺,并分析實驗數據。在100 m×100 m區域內部署100~200個未知節點(n=100~200),錨節點數15至45個。所有節點的通信半徑在20 m~45 m變化。具體的仿真參數如表3所示。
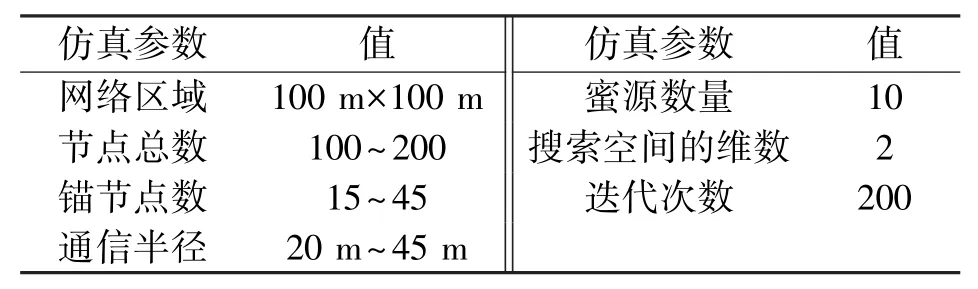
表3 仿真參數
此外,選擇-SFRP算法和RCCF算法,并分析它們的歸一化定位誤差性能:

3.2 錨節點數對歸一化定位誤差的影響
首先,分析錨節點數對歸一化定位誤差的影響,如圖3所示。實驗參數:150個未知節點數,節點通信半徑為35 m;錨節點數從15個至45變化,步長為5。
從圖3可知,錨節點數的增加降低了節點的歸一化定位誤差。在錨節點數小于25時,錨節點數的增加,有效地提高了定位精度。原因在于:錨節點數越多,未知節點收到的定位信息越多,定位精度就越高。但當錨節點數增加到一定量后(大于30),錨節點數的增加并不能有效地降低歸一化定位誤差。此外,相比于SFRP和RCCF算法,提出的RGBL算法的定位精度提高了約8.94%和4.75%。
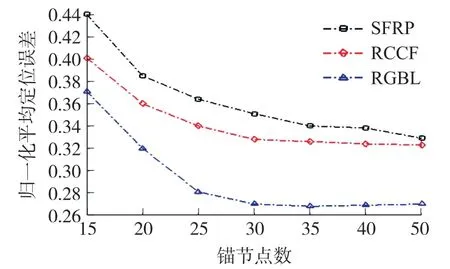
圖3 錨節點數對歸一化平均定位誤差的影響
3.3 通信半徑對歸一化定位誤差的影響
接下來,分析通信半徑對歸一化定位誤差的影響,如圖4所示。實驗參數:150個未知節點數,30個錨節點數,節點通信半徑從20 m~45 m變化,步長為5。
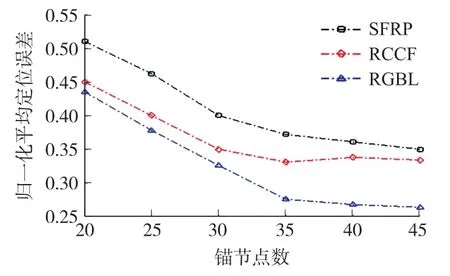
圖4 通信半徑對歸一化平均定位誤差的影響
從圖4可知,歸一化平均定位誤差隨通信半徑的增加而下降。原因在于:通信半徑越大,節點的一跳通信范圍越大,測距誤差越小。定位精度越高。此外,相比于SFRP算法和RCCF算法,RGBL算法提升了定位精度,歸一化平均定位誤差分別降低7.86%和3.23%。
3.4 未知節點數對歸一化平均定位誤差的影響
本次實驗分析未知節點數對定位精度的影響,如圖5所示。實驗參數:通信半徑為35 m,未知節點數從100至200個變化,錨節點數為未知節點數的20%。例如,未知節點為200個時,錨節點數就為40個。
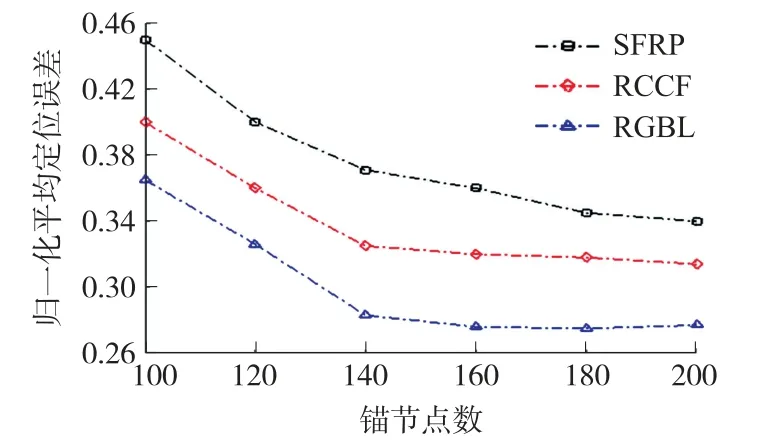
圖5 未知節點數對歸一化平均定位誤差的影響
從圖5可知,歸一化平均定位誤差隨節點數的增加而下降。原因在于:節點數越多,網絡內節點分布可能越均勻,網絡連通性越好。由于錨節點數的增加也隨之增加,錨節點數的增加也有利于定位精度的提升(如圖5所示)。此外,相比于SFRP算法和RCCF算法,RGBL算法在歸一化平均定位誤差方面仍保有明顯的優勢。
3.5 收斂速度性能
本次實驗分析RGBL算法、SFRP和RCCF算法的收斂速度。實驗參數:未知節點150,錨節點30個,節點通信半徑為30m。最大的迭代次數為100次。
圖6給出迭代次數從1至100變化條件下,RGBL算法、SFRP和RCCF算法的定位誤差。從圖6可知,RGBL算法在迭代到約11次時,定位誤差值就達到了收斂。而RCCF算法在迭到約14次,定位誤差達到收斂。人工蜂群算法在整個尋優過程中,引領蜂用于局部開發,跟隨峰用于儲存解,偵查蜂用于全局搜索,提高了收斂速度。
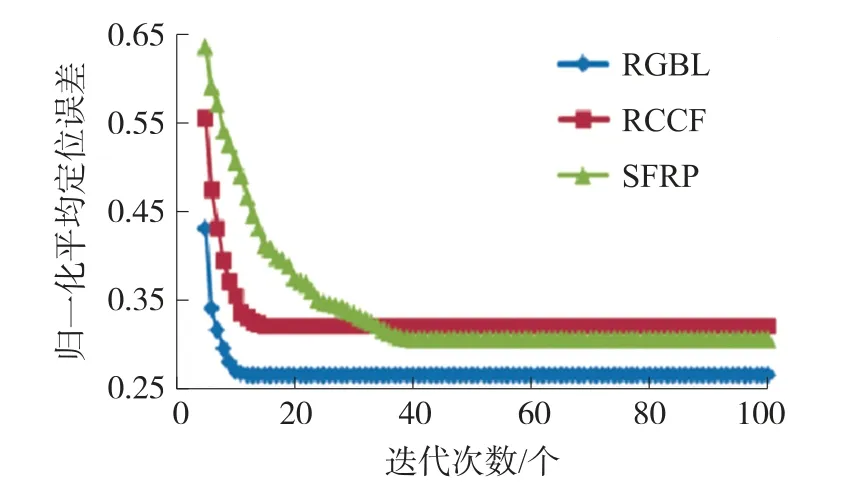
圖6 迭代次數與定位精度的關系
4 總結
針對基于RSSI測距所導致的定位誤差問題,提出基于RSSI高斯濾波的人工蜂群定位RGBL算法。RGBL算法結合了高斯濾波和人工蜂群算法。利用高斯濾波算法剔除誤差較大的RSSI值保留精度較高的RSSI值;利用人工蜂群算法的快速搜索性能,搜索目標函數的解,進而實現對未知節點的定位。
仿真結果表明,相比于同類的定位算法,提出的RGBL算法減少了定位誤差,提升算法的收斂速度。本次仿真考慮的仿真場景較簡單,而在實際的地理環境中,RSSI信號受多個環境因素影響。后期,將研究如何在復雜環境提高基于RSSI測距精度。這將是后期的研究工作。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
