基于視覺和輪速計(jì)緊耦合的輪式機(jī)器人定位算法研究*
2021-09-29 10:10:46朱道俊徐湛楠馬婷婷曹平國(guó)宋全軍
傳感技術(shù)學(xué)報(bào) 2021年7期
關(guān)鍵詞:測(cè)量實(shí)驗(yàn)
朱道俊,徐湛楠,馬婷婷,曹平國(guó),宋全軍*
(1.中國(guó)科學(xué)院合肥物質(zhì)科學(xué)研究院,安徽 合肥 230031;2.中國(guó)科學(xué)技術(shù)大學(xué)研究生院科學(xué)島分院,安徽 合肥 230026)
隨著機(jī)器人技術(shù)的發(fā)展和計(jì)算資源能力的提高,輪式機(jī)器人的應(yīng)用逐漸得到普及。定位技術(shù)是實(shí)現(xiàn)輪式機(jī)器人自主導(dǎo)航的重要技術(shù)環(huán)節(jié)。對(duì)于室內(nèi)外小場(chǎng)景范圍內(nèi)的輪式機(jī)器人應(yīng)用,如巡邏機(jī)器人,低成本、高精度、高魯棒性、易用性成為了定位系統(tǒng)的研究目標(biāo)。
同時(shí)建圖與定位(SLAM)技術(shù)[1]是研究機(jī)器人在未知環(huán)境下定位的主流技術(shù)方案。其中基于視覺傳感器的SLAM(V-SLAM)技術(shù)由于其低成本、測(cè)量信息豐富得到了廣泛研究。經(jīng)典的VSLAM工作有PTAM[2]、ORB-SLAM[3]、ORB-SLAM2[4]等,Mur-Artal R等提出的ORB-SLAM第一次將SLAM分為三個(gè)運(yùn)行線程進(jìn)行處理,實(shí)現(xiàn)了V-SLAM大場(chǎng)景下的實(shí)時(shí)運(yùn)行能力[3]。然而實(shí)際環(huán)境中由于場(chǎng)景特征的單一(如走廊環(huán)境)和傳感器的快速運(yùn)動(dòng)等,很容易導(dǎo)致V-SLAM定位失敗,魯棒性較差。
視覺-慣性融合SLAM(VI-SLAM)是通過融合視覺和IMU傳感器的SLAM方案,由于IMU具有很好的動(dòng)態(tài)特性,VI-SLAM能有效處理機(jī)體的快速運(yùn)動(dòng)和場(chǎng)景單一的情況。經(jīng)典工作有MSCKF[5]、SMSCKF[6]、OKVIS[7]、VINS-Mono[8]等。香港科技大學(xué)秦通等提出的VINS-Mono因其快速精確初始化流程、視覺-慣性緊耦合非線性滑動(dòng)窗口優(yōu)化估計(jì)器、四自由度位姿圖優(yōu)化等特點(diǎn)成為當(dāng)前VI-SLAM中定位效果最好的算法之一,實(shí)現(xiàn)了在無(wú)人航空飛行器上的精準(zhǔn)位姿軌跡估計(jì),然而其在輪式移動(dòng)機(jī)器人上的應(yīng)用卻會(huì)出現(xiàn)很多退化問題,導(dǎo)致定位精度下降甚至定位失敗。為了實(shí)現(xiàn)VINS-Mono精確有效的初始化,需要保證初始化過程中機(jī)體有充分的三軸運(yùn)動(dòng)激勵(lì),而輪式機(jī)器人由于平面運(yùn)動(dòng)的限制,很難做到這點(diǎn)。Wu等通過數(shù)學(xué)和實(shí)驗(yàn)證明了當(dāng)輪式機(jī)器人在某些特定運(yùn)動(dòng)場(chǎng)景下,VINS會(huì)出現(xiàn)額外的不可觀自由度,會(huì)帶來(lái)很大的估計(jì)偏差[9],比如純直線運(yùn)動(dòng)、常量局部加速度運(yùn)動(dòng)等,而這些運(yùn)動(dòng)情形在輪式機(jī)器人上是很常見的。
針對(duì)輪式機(jī)器人,輪速計(jì)傳感器可以很好的替代IMU,輪速計(jì)也能夠提供高頻率的機(jī)體狀態(tài)量測(cè)量,同時(shí)對(duì)于特殊運(yùn)動(dòng)場(chǎng)景,輪速計(jì)不會(huì)帶來(lái)退化問題。Wu等也證明了通過融合輪速計(jì)信息能夠避免尺度不可觀的問題,提高定位精度[9]。Zhang等[10]、Liu等[11]、Lee等[12]通過融合視覺-IMU-輪速計(jì)信息來(lái)實(shí)現(xiàn)輪式機(jī)器人定位,結(jié)果相比于VINS都有了很大的提高。Zheng等提出了一種基于視覺-輪速計(jì)緊耦合的定位系統(tǒng),它基于ORB-SLAM框架進(jìn)行改進(jìn)實(shí)現(xiàn),提出了一種新的視覺重投影觀測(cè)誤差形式[13]。
為了同時(shí)追求系統(tǒng)的運(yùn)行效率和定位精度,本文發(fā)現(xiàn)在室內(nèi)外小范圍平面運(yùn)動(dòng)場(chǎng)景下,視覺-IMU-輪速計(jì)定位系統(tǒng)相比于視覺-輪速計(jì)定位系統(tǒng),會(huì)引入大量的額外系統(tǒng)負(fù)擔(dān),比如,IMU的融合大大增加了系統(tǒng)的狀態(tài)維度、增加了系統(tǒng)初始化的難度[8],然而定位精度不會(huì)有很大的提高,甚至對(duì)于低成本IMU,會(huì)帶來(lái)更大的定位誤差。因此,本文中提出緊耦合視覺和輪速計(jì)定位方案,提高系統(tǒng)定位精度的同時(shí)提升系統(tǒng)運(yùn)行效率,主要貢獻(xiàn)如下:①提出了一種基于非線性滑動(dòng)窗口優(yōu)化的視覺-輪速計(jì)定位系統(tǒng)估計(jì)器;②提出改進(jìn)了一種聯(lián)合視覺-輪速計(jì)的快速精確系統(tǒng)初始化方案。③輪速計(jì)-相機(jī)坐標(biāo)系變換外參在線標(biāo)定。
1 數(shù)學(xué)記號(hào)
在本文中,我們使用大寫字母表示向量/矩陣,使用小寫字母表示標(biāo)量,∈SO(3)表示坐標(biāo)系B到坐標(biāo)系A(chǔ)的旋轉(zhuǎn)變換,為其單位四元數(shù)表示,這里使用Hamilton表達(dá)形式[14];ApB∈R表示坐標(biāo)系B原點(diǎn)在坐標(biāo)系A(chǔ)下的坐標(biāo);A(·)表示坐標(biāo)系A(chǔ)下的某量,表示狀態(tài)估計(jì)值或者測(cè)量值,δ(·)表示狀態(tài)的誤差形式,本文使用右乘擾動(dòng)來(lái)定義旋轉(zhuǎn)誤差,其形式為:

?表示四元數(shù)乘法,(·)img表示四元數(shù)的虛數(shù)部分;表示向量對(duì)應(yīng)的反對(duì)稱矩陣,比如向量a=[a1a2a3]T對(duì)應(yīng)的反對(duì)稱矩陣為:
ei表示R3×3單位矩陣的第i列,。SO(3)上的李代數(shù)表示為so(3),log(·)獲得SO(3)對(duì)應(yīng)的so(3),反之,exp(·)將so(3)轉(zhuǎn)換為SO(3)。向量v的第i個(gè)元素表示為v(i)。
本文涉及到三個(gè)不同的坐標(biāo)系,分別是世界坐標(biāo)系、輪速計(jì)坐標(biāo)系(機(jī)體坐標(biāo)系)和相機(jī)坐標(biāo)系,我們將它們依次表示為w、b和c。另外bk、ck表示時(shí)間順序上第k個(gè)機(jī)體坐標(biāo)系和對(duì)應(yīng)的相機(jī)坐標(biāo)系。
2 系統(tǒng)描述
如圖1所示。系統(tǒng)輸入為相機(jī)和輪速計(jì)觀測(cè)信息,對(duì)于新的圖像幀,先使用KLT光流法跟蹤上一幀的特征點(diǎn),再提取新的Shi-Tomasi角點(diǎn)。對(duì)于新幀和上一幀之間的輪速計(jì)測(cè)量值,進(jìn)行預(yù)積分處理,詳見4.4節(jié)。
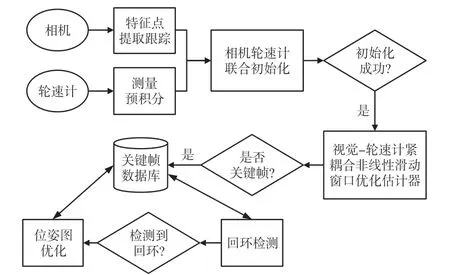
圖1 系統(tǒng)流程圖
若系統(tǒng)未完成初始化,則進(jìn)行相機(jī)輪速計(jì)聯(lián)合初始化,詳見3節(jié)。若初始化成功,則進(jìn)行視覺-輪速計(jì)緊耦合非線性滑動(dòng)窗口優(yōu)化,詳見4節(jié),若窗口中幀數(shù)達(dá)到最大,則判斷次新幀是否為關(guān)鍵幀,若是,則選擇窗口中的最老關(guān)鍵幀進(jìn)行邊緣化,否則邊緣化次新幀[8]。
為消除長(zhǎng)時(shí)間累積誤差,對(duì)新關(guān)鍵幀進(jìn)行回環(huán)檢測(cè),在歷史關(guān)鍵幀數(shù)據(jù)庫(kù)中查找當(dāng)前關(guān)鍵幀的回環(huán)幀。回環(huán)檢測(cè)基于視覺詞袋庫(kù)DBoW2[15]進(jìn)行實(shí)現(xiàn)。若檢測(cè)到回環(huán),則進(jìn)行六自由度位姿圖優(yōu)化,保證長(zhǎng)時(shí)間位姿軌跡估計(jì)的一致性[8]。
3 視覺-輪速計(jì)聯(lián)合初始化
與VINS-Mono不同的是,本文提出使用兩幀快速初始化,將第一幀F(xiàn)0設(shè)置為世界坐標(biāo)系原點(diǎn),為保證比較好的初始化,初始化兩幀之間需要有足夠的視差,設(shè)置初始化視差閾值為Tp,當(dāng)前幀F(xiàn)c與F0的視差小于Tp時(shí),則丟棄該幀,反之,設(shè)置當(dāng)前幀為初始化第二幀F(xiàn)1。由于輪速計(jì)能夠提供比較精確的短時(shí)間位姿估計(jì),因此可通過輪速計(jì)積分測(cè)量來(lái)預(yù)測(cè)F1的位姿,如圖2所示,對(duì)F0和F1跟蹤匹配的特征點(diǎn)進(jìn)行三角化,最后進(jìn)行一次集束調(diào)整(BA)優(yōu)化,所需最小化的誤差函數(shù)為:

為求解式(2),我們采用迭代求解的方式,每次迭代通過求解增量方程Hδx=b得到更新增量δx,然后更新到當(dāng)前狀態(tài)估計(jì)值上:,對(duì)于平移狀態(tài),,對(duì)于旋轉(zhuǎn)狀態(tài),。本文中使用Ceres Solver庫(kù)[16]來(lái)求解上訴迭代優(yōu)化問題。
4 視覺-輪速計(jì)緊耦合非線性滑動(dòng)窗口優(yōu)化估計(jì)器
非線性滑動(dòng)窗口優(yōu)化估計(jì)器中的狀態(tài)及測(cè)量約束關(guān)系可用因子圖進(jìn)行表示,如圖3所示,其中圓形和橢圓形表示系統(tǒng)優(yōu)化的狀態(tài),方塊表示測(cè)量誤差因子,與方塊相連接的連接線表示該測(cè)量因子所關(guān)聯(lián)到的狀態(tài)。優(yōu)化的狀態(tài)包括關(guān)鍵幀位姿、輪速計(jì)相機(jī)外參和特征點(diǎn)位置,詳見4.1節(jié)。傳感器測(cè)量約束因子包括特征點(diǎn)重投影誤差因子和輪速計(jì)預(yù)積分測(cè)量誤差因子,詳見4.2和4.3節(jié)。為了處理低頻視覺信息和高頻輪速計(jì)信息的融合,本文進(jìn)行了相鄰關(guān)鍵幀間輪速計(jì)測(cè)量預(yù)積分和誤差傳播,詳見4.4節(jié)。
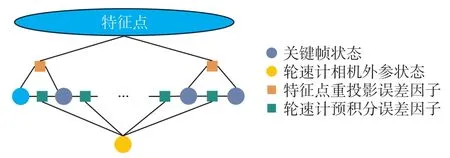
圖3 非線性滑動(dòng)窗口優(yōu)化估計(jì)器因子圖
4.1 系統(tǒng)狀態(tài)
滑動(dòng)窗口中估計(jì)狀態(tài)為:

式中:N為滑動(dòng)窗口大小,m為滑動(dòng)窗口中所能觀測(cè)到的路標(biāo)點(diǎn)數(shù)量表示第i幀位姿狀態(tài),λl,l=1,…,m表示第l個(gè)路標(biāo)點(diǎn)逆深度狀態(tài),參數(shù)化表示在錨坐標(biāo)系(觀測(cè)首幀相機(jī)坐標(biāo)系)下[8],定義如下:
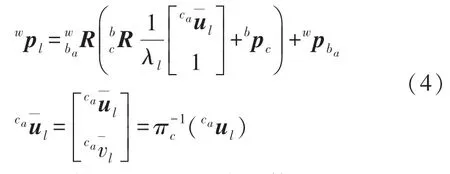
式中:ba/ca分別表示觀測(cè)首幀機(jī)體/相機(jī)坐標(biāo)系,表示路標(biāo)點(diǎn)l在ca幀下的像素觀測(cè)坐標(biāo)值,將其通過相機(jī)內(nèi)參和畸變參數(shù)轉(zhuǎn)換到歸一化平面坐標(biāo),這個(gè)轉(zhuǎn)換過程即為。表示輪速計(jì)坐標(biāo)系和相機(jī)坐標(biāo)系之間的外參變換,這里將其作為系統(tǒng)狀態(tài)進(jìn)行在線估計(jì),可以減小不精確的外參標(biāo)定結(jié)果對(duì)定位精度的影響。如果有比較精確的外參線下標(biāo)定值,可以將其從系統(tǒng)狀態(tài)估計(jì)中移除。
4.2 視覺觀測(cè)誤差因子
如圖4所示,路標(biāo)點(diǎn)l在cj幀的重投影誤差定義為觀測(cè)坐標(biāo)和重投影坐標(biāo)之間的坐標(biāo)差值,重投影坐標(biāo)計(jì)算方法為首先將路標(biāo)點(diǎn)l通過其逆深度和觀測(cè)首幀位姿估計(jì)轉(zhuǎn)換到世界坐標(biāo)系下,再通過cj幀位姿估計(jì)投影到cj幀圖像平面上,如下所示:
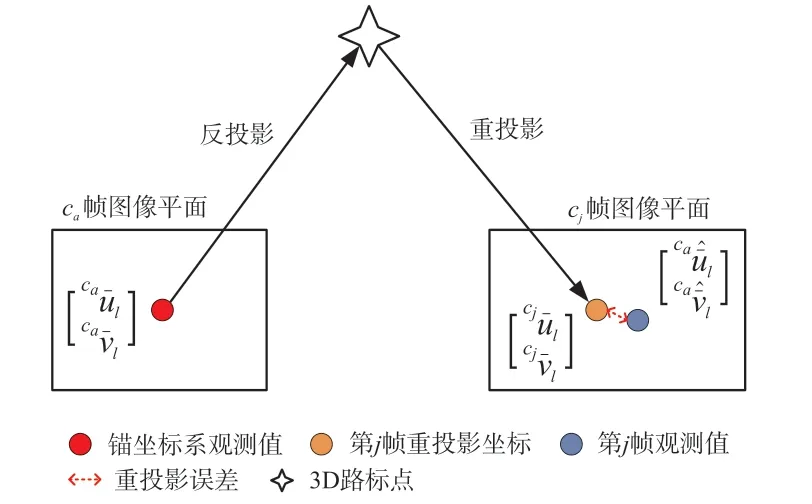
圖4 特征點(diǎn)重投影觀測(cè)誤差
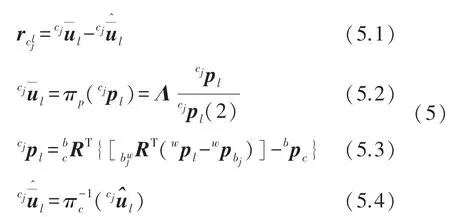
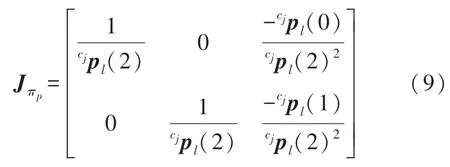
其中式(5.1)表示重投影誤差,為路標(biāo)點(diǎn)l在cj幀上預(yù)測(cè)歸一化平面坐標(biāo),為觀測(cè)歸一化平面坐標(biāo),式(5.2)將相機(jī)坐標(biāo)系下坐標(biāo)點(diǎn)投影到相機(jī)歸一化平面上,為路標(biāo)點(diǎn)l在相機(jī)坐標(biāo)系cj下的坐標(biāo),(2)表示向量的第三個(gè)元素,式(5.3)將路標(biāo)點(diǎn)l的世界坐標(biāo)轉(zhuǎn)換到cj幀相機(jī)坐標(biāo)系下,通過式(4)計(jì)算獲得。
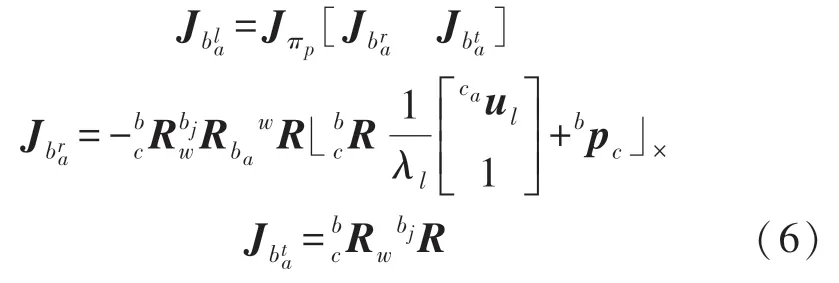
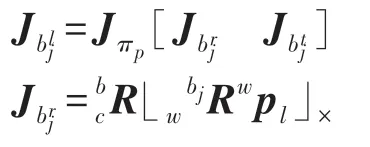
由式(4)、式(5)可以看出,路標(biāo)點(diǎn)l一次視覺重投影誤差分別關(guān)聯(lián)到錨機(jī)體坐標(biāo)系位姿狀態(tài)、當(dāng)前機(jī)體坐標(biāo)系位姿狀態(tài)和路標(biāo)點(diǎn)的逆深度狀態(tài),因此需要分別對(duì)三個(gè)狀態(tài)求誤差雅可比矩陣,分別設(shè)為。


4.3 輪速計(jì)誤差因子
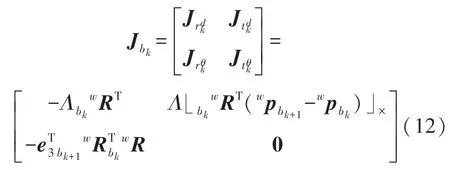
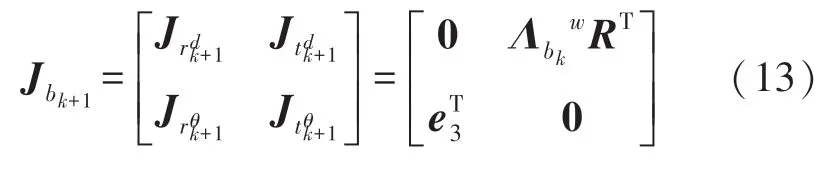
兩個(gè)相鄰關(guān)鍵幀F(xiàn)k和Fk+1之間的輪速計(jì)積分測(cè)量為:

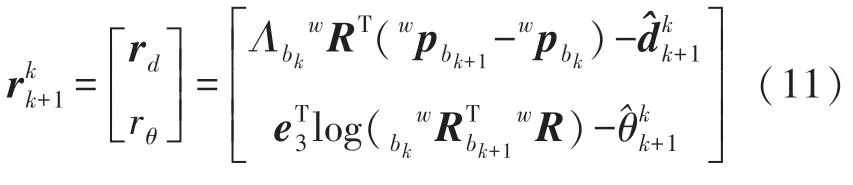
式中:rd表示輪速計(jì)平移測(cè)量誤差,rθ表示輪速計(jì)航向角測(cè)量誤差。
4.4 輪速計(jì)預(yù)積分
由于相鄰關(guān)鍵幀之間有多次輪速計(jì)測(cè)量,為了獲得相鄰關(guān)鍵幀之間輪速計(jì)測(cè)量的噪聲協(xié)方差矩陣,需要將輪速計(jì)測(cè)量進(jìn)行積分。如圖5所示,用i、j表示圖像測(cè)量時(shí)間索引,用k表示輪速計(jì)測(cè)量時(shí)間索引,我們將圖像測(cè)量時(shí)刻ti和tj之間的輪速計(jì)測(cè)量進(jìn)行積分和誤差遞推。
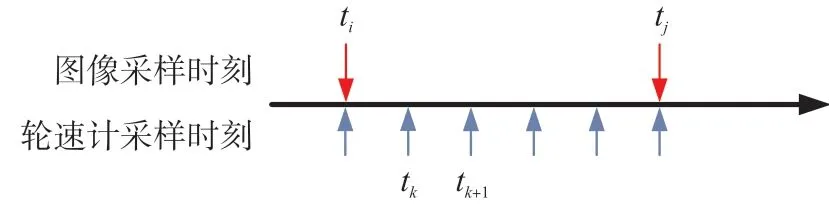
圖5 輪速計(jì)預(yù)積分
輪速計(jì)k時(shí)刻的測(cè)量為:

根據(jù)SSε(2)上的遞推公式,有:

式中:Φ(·)表示對(duì)應(yīng)的二維旋轉(zhuǎn)矩陣,ivk+1的噪聲協(xié)方差由ivk噪聲協(xié)方差和nvk測(cè)量噪聲協(xié)方差遞推得到,因此需要求得式(15)對(duì)ivk和nvk的雅可比矩陣,設(shè)分別為Jvk、Jnk,解析表達(dá)式為:

以此遞推,可以得到ti和tj時(shí)刻圖像幀之間的輪速計(jì)積分測(cè)量ivj和噪聲協(xié)方差矩陣iΣj。
5 實(shí)驗(yàn)及分析
5.1 實(shí)驗(yàn)配置
本部分對(duì)本文所提出算法進(jìn)行了實(shí)驗(yàn)驗(yàn)證,實(shí)驗(yàn)平臺(tái)如圖6所示,四輪車上搭載了一個(gè)PC和一個(gè)相機(jī)。PC用于讀取相機(jī)和輪速計(jì)傳感器測(cè)量信息和進(jìn)行算法處理,機(jī)器人操作系統(tǒng)(ROS)用來(lái)進(jìn)行四輪車、相機(jī)和PC的信息通信傳輸,使用操作系統(tǒng)為Ubuntu18.0。
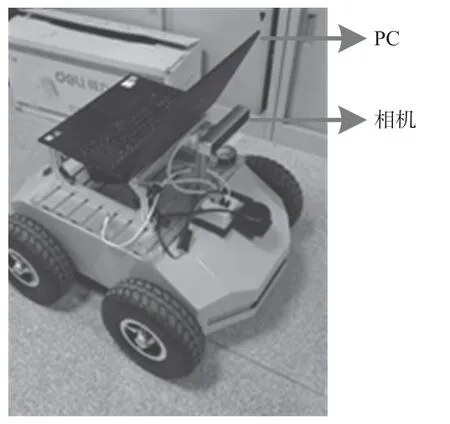
圖6 實(shí)驗(yàn)平臺(tái)配置
實(shí)驗(yàn)設(shè)備的具體型號(hào)配置如表1所示。本實(shí)驗(yàn)代碼基于開源VINS-Mono[17]代碼框架修改。

表1 實(shí)驗(yàn)設(shè)備具體配置信息
為了驗(yàn)證所提算法的精確度,另外進(jìn)行了兩組對(duì)比實(shí)驗(yàn),其一是基于視覺-IMU融合的VINS-Mono方案;其二是僅使用輪速計(jì)的定位方案。為了量化評(píng)估軌跡誤差,實(shí)驗(yàn)數(shù)據(jù)采集時(shí)確保了起始位置和終止位置相同,通過計(jì)算終點(diǎn)、起始點(diǎn)位置估計(jì)距離差和軌跡總長(zhǎng)度的比例來(lái)定義估計(jì)誤差,如式(18)所示,其中為終止點(diǎn)估計(jì)位置,為起始點(diǎn)位姿估計(jì),^S為軌跡總長(zhǎng)度估計(jì)。因?yàn)槠鹗键c(diǎn)設(shè)置為世界坐標(biāo)系原點(diǎn),所以=0。

傳感器之前的外參數(shù)通過線下進(jìn)行標(biāo)定,相機(jī)內(nèi)參和相機(jī)-IMU外參數(shù)通過Kalibr[18]進(jìn)行標(biāo)定。相機(jī)-輪速計(jì)外參數(shù)通過CamOdomCalibraTool[19]進(jìn)行標(biāo)定,該標(biāo)定參數(shù)為粗略標(biāo)定,會(huì)對(duì)該參數(shù)進(jìn)行在線估計(jì)優(yōu)化。
5.2 軌跡誤差分析
實(shí)驗(yàn)中錄制了三種不同場(chǎng)景的數(shù)據(jù)集進(jìn)行測(cè)試,分別是實(shí)驗(yàn)室,會(huì)議室和走廊環(huán)境,如圖7所示。對(duì)每個(gè)實(shí)驗(yàn)場(chǎng)景采集的數(shù)據(jù)集,分別對(duì)本文所提算法和比較算法運(yùn)行了3次,并取結(jié)果平均值作為誤差結(jié)果。如圖8所示,分別為本文所提算法、VINSMono和輪速計(jì)在三個(gè)實(shí)驗(yàn)場(chǎng)景下其中一次運(yùn)行結(jié)果所估計(jì)的運(yùn)動(dòng)軌跡。從圖中可以看出,VINSMono和輪速計(jì)都產(chǎn)生了很大的軌跡誤差,VINSMono甚至在實(shí)驗(yàn)室場(chǎng)景中產(chǎn)生了發(fā)散,原因在于以下幾個(gè)方面,一是本實(shí)驗(yàn)采用了低價(jià)的IMU傳感器,有比較大的誤差,二是VINS-Mono對(duì)相機(jī)和IMU之前的外參標(biāo)定和時(shí)間同步參數(shù)有很高的精度要求,而這對(duì)低價(jià)的傳感器配置來(lái)說(shuō)是很難實(shí)現(xiàn),三是本實(shí)驗(yàn)的場(chǎng)景主要是平面運(yùn)動(dòng),且大部分是直線運(yùn)動(dòng)和勻加速運(yùn)動(dòng),這給VINS-Mono的初始化以及后面的估計(jì)帶來(lái)了很大的不可觀問題[9]。另外,僅用輪速計(jì)的軌跡估計(jì)隨著時(shí)間增長(zhǎng)誤差將不斷增大,原因是輪速計(jì)是通過積分得到位姿估計(jì)的,因?yàn)闇y(cè)量帶有誤差,所以長(zhǎng)時(shí)間的輪速計(jì)積分將不斷積累誤差。而本文所提算法通過融合相機(jī)和輪速計(jì)信息獲得了很精確的定位表現(xiàn),通過視覺特征點(diǎn)、觀測(cè)測(cè)量來(lái)矯正輪速計(jì)積分誤差,同時(shí)輪速計(jì)積分測(cè)量也對(duì)相鄰幀間的位姿起到較精確的約束作用。相比IMU,視覺-輪速計(jì)融合能夠獲得更魯棒的表現(xiàn),機(jī)體終點(diǎn)位置估計(jì)能很好的回到初始點(diǎn),其終點(diǎn)位置估計(jì)誤差如表2所示。如圖9所示為所提算法和其他兩種對(duì)比算法分別在三種實(shí)驗(yàn)場(chǎng)景下的估計(jì)軌跡誤差,其中水平橫軸表示不同的估計(jì)算法,水平縱軸表示不同的實(shí)驗(yàn)場(chǎng)景,垂直軸表示算法估計(jì)誤差。可以看出所提算法相比于VINS-Mono和純輪速計(jì)估計(jì)都有很大程度的精度提高。
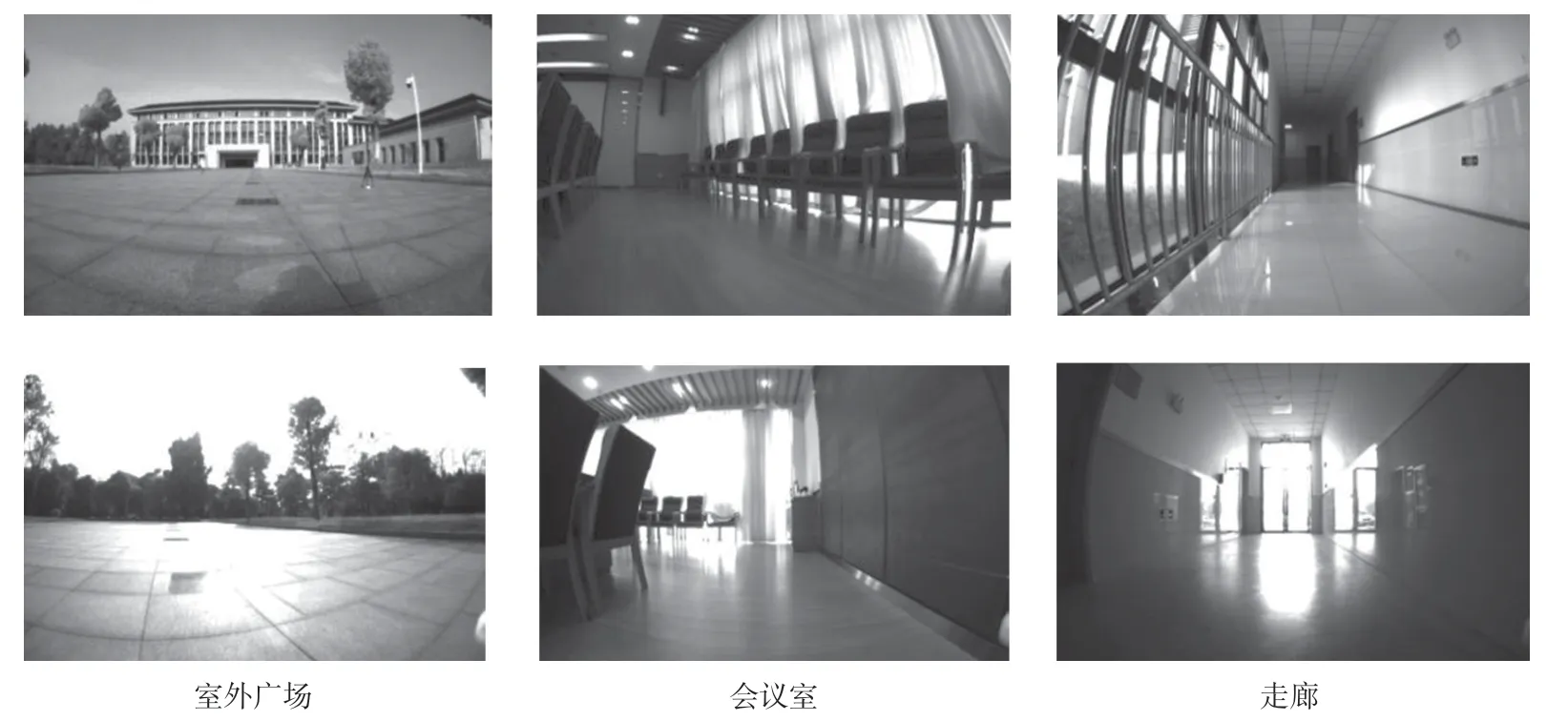
圖7 實(shí)驗(yàn)數(shù)據(jù)采集環(huán)境,從左至右分別為實(shí)驗(yàn)室、會(huì)議室和走廊
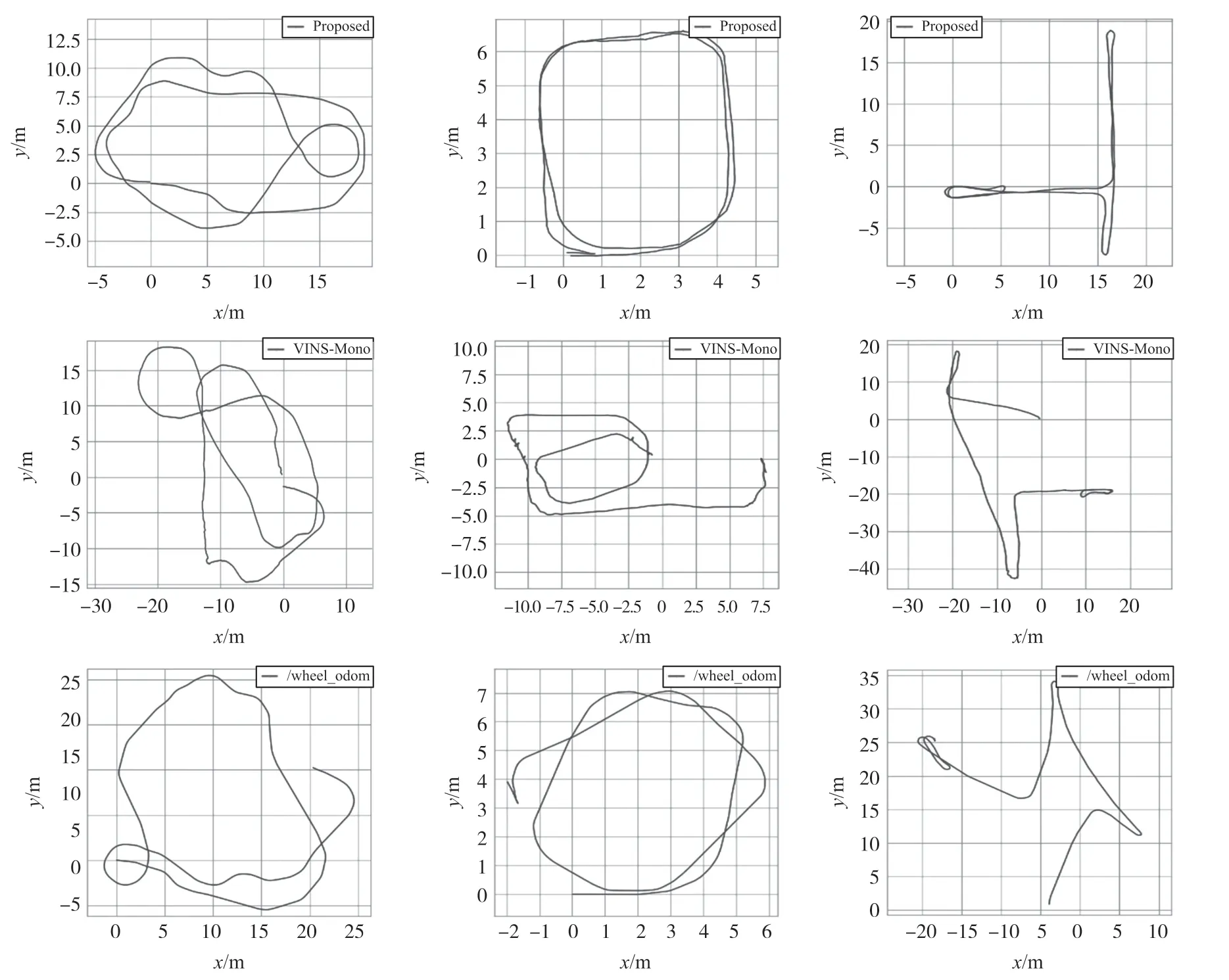
圖8 所提算法和其他兩種對(duì)比算法分別在三種實(shí)驗(yàn)場(chǎng)景下的估計(jì)軌跡對(duì)比圖
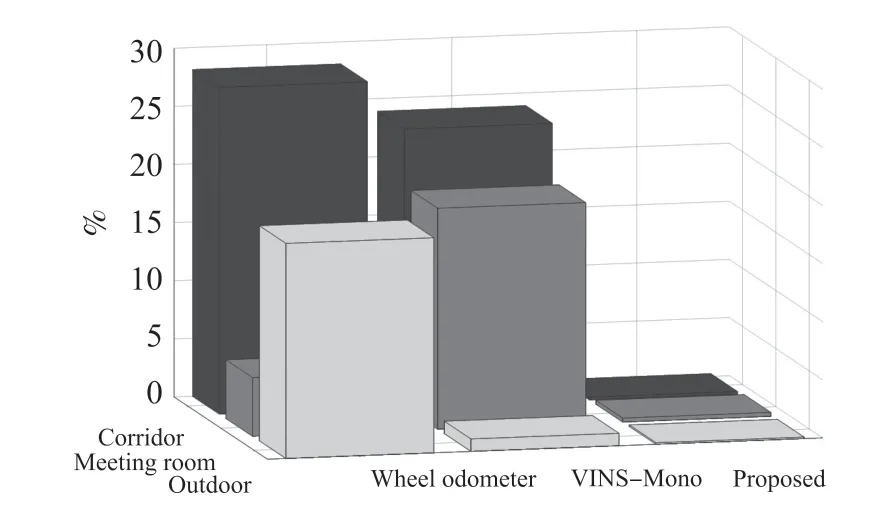
圖9 所提算法和對(duì)比算法分別在三種場(chǎng)景下估計(jì)軌跡誤差對(duì)比
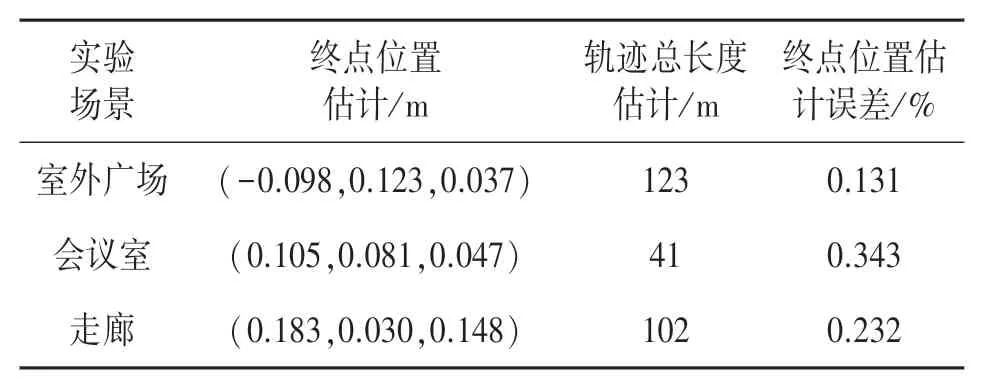
表2 所提算法在三個(gè)實(shí)驗(yàn)場(chǎng)景下的估計(jì)誤差
5.3 輪速計(jì)-相機(jī)外參在線標(biāo)定實(shí)驗(yàn)分析
實(shí)驗(yàn)中對(duì)輪速計(jì)-相機(jī)外參進(jìn)行了粗略線下標(biāo)定,為了進(jìn)一步優(yōu)化該參數(shù),可對(duì)其進(jìn)行在線估計(jì)。輪速計(jì)-相機(jī)外參數(shù)有6個(gè)自由度,分別是3自由度平移和3自由度旋轉(zhuǎn),然而由于平面運(yùn)動(dòng),只有5個(gè)自由度可觀,z軸平移不可觀[20],因此只能估計(jì)出輪速計(jì)-相機(jī)外參數(shù)中的x、y軸平移和roll、pitch、yaw旋轉(zhuǎn)角。如圖10和圖11所示,分別為輪速計(jì)-相機(jī)平移外參和旋轉(zhuǎn)外參估計(jì)值,可以看出,參數(shù)估計(jì)在經(jīng)歷初始階段的稍微震蕩后,最后都趨于收斂穩(wěn)定。
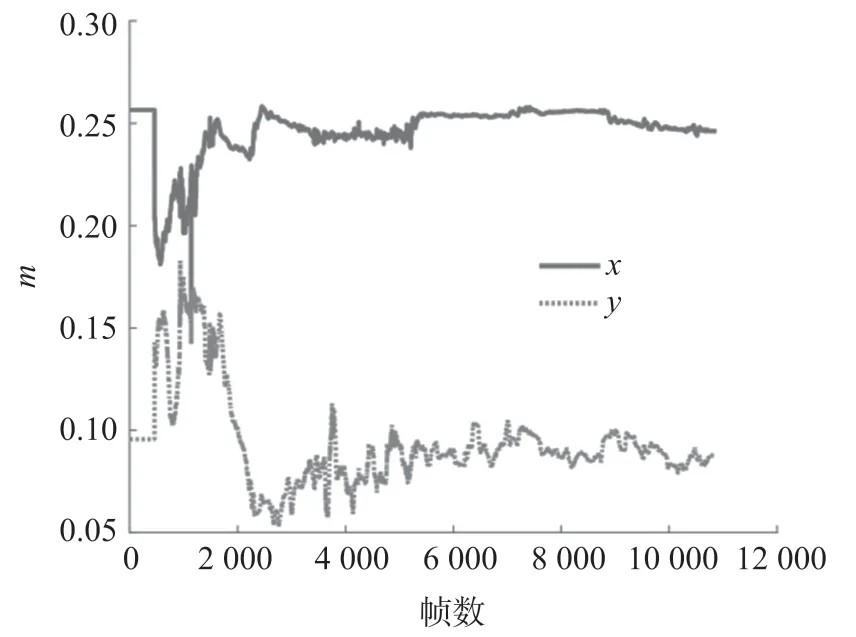
圖10 輪速計(jì)-相機(jī)平移外參在線估計(jì)結(jié)果
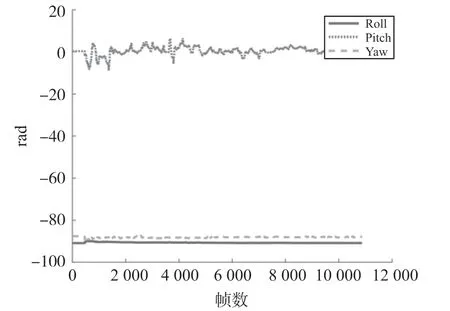
圖11 輪速計(jì)-相機(jī)旋轉(zhuǎn)外參在線估計(jì)結(jié)果
5.4 系統(tǒng)運(yùn)行效率實(shí)驗(yàn)分析
本部分實(shí)驗(yàn)對(duì)比了所提算法與VINS-Mono的運(yùn)行效率。保持其他條件參數(shù)相同,如滑動(dòng)窗口大小(實(shí)驗(yàn)中設(shè)置為10幀),優(yōu)化完成的最長(zhǎng)時(shí)間(實(shí)驗(yàn)中設(shè)置為0.04 s)和最大迭代次數(shù)(實(shí)驗(yàn)中設(shè)置為8)。以會(huì)議室場(chǎng)景為例,如圖12所示,為兩個(gè)系統(tǒng)在初始化完成后的30 s內(nèi)每次迭代優(yōu)化所需的時(shí)
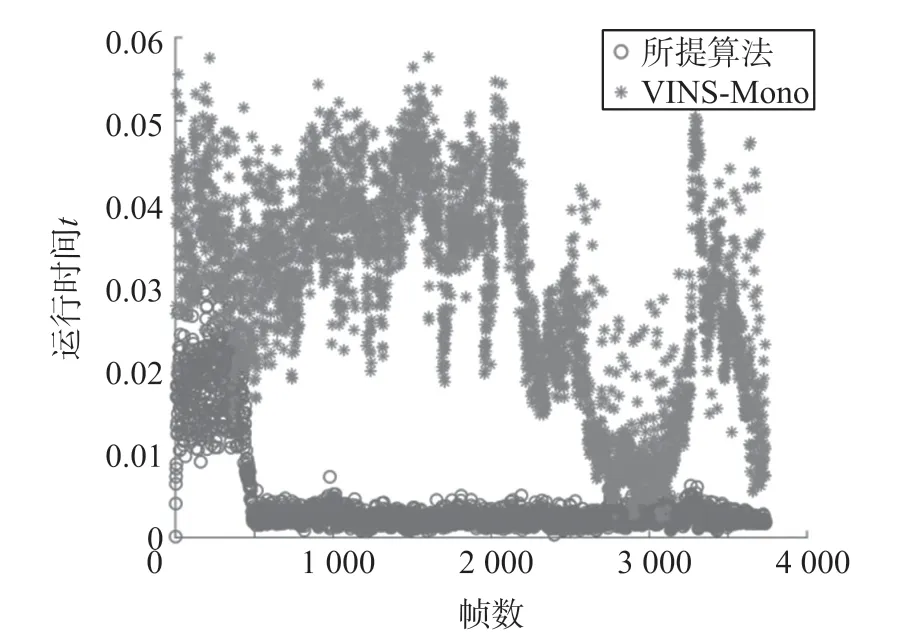
圖12 本文所提算法與VINS-Mono運(yùn)行效率對(duì)比
間,可以看出本文所提算法一次優(yōu)化耗時(shí)大約是VINS-Mono的1/10,效率得到了很大提高。原因在于輪速計(jì)信息的融合并沒有引入額外的系統(tǒng)狀態(tài),每幀的狀態(tài)維度為6維,相反,VINS-Mono系統(tǒng)中,每幀需要估計(jì)的狀態(tài)維度為15維,因此大大增加了優(yōu)化迭代時(shí)需要的時(shí)間。
6 結(jié)論
本文提出了一個(gè)基于視覺-輪速計(jì)緊耦合的輪式移動(dòng)機(jī)器人定位算法。采用了基于滑動(dòng)窗口的非線性優(yōu)化框架,最小化特征點(diǎn)觀測(cè)重投影誤差和幀間輪速計(jì)積分測(cè)量誤差,來(lái)保證系統(tǒng)的實(shí)時(shí)性和精確度。此外,本文提出了基于視覺-輪速計(jì)聯(lián)合的系統(tǒng)初始化流程,能夠快速精確的完成初始化。本文所提系統(tǒng)中對(duì)相機(jī)-輪速計(jì)坐標(biāo)系變換外參進(jìn)行了在線標(biāo)定,在粗略的線下標(biāo)定外參數(shù)下,對(duì)其進(jìn)行在線估計(jì)優(yōu)化,減少了對(duì)傳感器線下高精度標(biāo)定的要求。通過實(shí)驗(yàn)表明,在低成本實(shí)驗(yàn)傳感器配置的情況下,本文所提算法在小范圍室內(nèi)外輪式機(jī)器人應(yīng)用場(chǎng)景下相比于VINS-Mono獲得了更魯棒更精確的定位表現(xiàn),同時(shí)運(yùn)行效率也有比較大的提高。本文實(shí)驗(yàn)場(chǎng)景為室內(nèi)外規(guī)則平面環(huán)境,未考慮輪速計(jì)打滑造成的影響,下一步將加入對(duì)輪速計(jì)打滑情況的處理。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
