基于EMD-TFPF的仿生偏振光羅盤去噪方法
2021-09-28 06:18:40趙成帥吳新冬趙東花王晨光劉曉杰
導航定位與授時 2021年5期
趙成帥,吳新冬,趙東花,王晨光,劉曉杰,申 沖
(1.中北大學儀器科學與動態測試教育部重點實驗室,太原 030051;2.中北大學儀器與電子學院,太原 030051;3.中北大學信息與通信工程學院,太原 030051)
0 引言
仿生偏振光羅盤可用于無人機、無人車等無人運動平臺的自主定向。成像式偏振光羅盤運動過程中測得的航向角包含偏振角測量和太陽方位角測量兩方面的誤差,其中偏振角測量過程中包含了高斯白噪聲。本文首次提出了一種應用于仿生偏振光羅盤基于經驗模態分解(Empirical Mode Deco-mposition, EMD)和時頻峰值濾波(Time-Frequency Peak Filtering,TFPF)的聯合降噪方法。
目前,研究人員對仿生偏振光導航系統的定向原理進行了大量研究,并設計了一系列的定向系統。但是只有少部分研究人員考慮到通過減小偏振光定向系統的誤差來提升其定向精度。例如,2016年,基于脈沖耦合神經網絡(Pulse Coupled Neural Network,PCNN)的算法被提出,并應用于惡劣環境下的成像式仿生偏振光導航系統的導航方法當中[1]。該方法在對偏振度圖像PCNN濾波后,僅保存了偏振角圖像中的高精度區域,從而大大提高了羅盤的準確性和魯棒性。經實驗驗證,天氣晴朗時的羅盤精度為0.1805°,在遮擋情況下的精度優于1°,月光等弱偏振信息源下的精度為0.8780°。2017年,國防科技大學的韓國良等設計了一種由電荷耦合器件(Charge Coupled Device,CCD)相機、像素化偏振器陣列和廣角鏡頭組成的偏振光羅盤[2],并且建立了包括CCD像素響應誤差和像素化偏振陣列安裝誤差在內的誤差模型,提出了一種基于最小二乘迭代估計的標定方法,定向誤差標準方差達到0.15°。2019年,Gkanias等提出了一種運用偏振信息直接估計太陽方位角及其置信度的方法,可以用于估計太陽隨時間的變化,并介紹了一種在非平坦地面上校正偏振光傳感器陣列傾斜的方法[3]。2021年,一種通過連續旋轉法改進太陽子午線最小二乘擬合過程的算法被提了出來[4],經室外實驗驗證,航向角精度為0.3335°,該算法提高了航向角計算過程中相對航向角的精度,但是沒有考慮太陽方位角(絕對航向角)求解過程中的誤差。
此外,雖然一些研究人員使用反向傳播神經網絡、Elman神經網絡和徑向基函數(Radical Basis Fuction,RBF)神經網絡很好地逼近了誤差的非線性關系,但是在提高羅盤精度上并沒有顯著的效果[5-6]。這些方法中均沒有考慮到偏振相機在測量偏振角時系統本身帶來的噪聲。
小波分析去噪方法也是一種經典的振動信號去噪算法,但仍存在一些局限性,在使用過程中通常需要設定閾值函數來改進圖像或振動信號的去噪效果[7-9]。卡爾曼濾波算法是一種經常使用在導航定位與姿態測量系統中的算法,對連續運動的系統狀態具有良好的線性估計作用。但是該方法需要建立準確的傳感器量測模型,在觀測值(真值)和估計值相差較大的情況下容易出現數據發散的現象。通常在工程實踐中使用聯邦卡爾曼濾波或容積卡爾曼濾波來提高其自適應性[10-12]。
EMD經常使用在信號的噪聲分析與抑制當中[13-14],可以有效地提高測量精度,并且表現出了極強的自適應分解特性。火箭軍工程大學的李文華等基于EMD和模態集合選擇標準,結合時間序列建模及卡爾曼濾波算法,提出了一種改進的微機電系統(Micro-Electro-Mechanical System,MEMS)陀螺儀隨機漂移分析方法,實現了MEMS陀螺儀信號去噪[15]。TFPF算法廣泛應用于信號處理等領域,它是一種基于瞬時頻率估計的信號濾波方法,通過頻率調制將含噪聲的信號調制為解析信號,將時頻分布的峰值作為瞬時頻率估計,從而消除噪聲。但是,在TFPF算法中,參數窗長的確定決定了信號不失真程度和噪聲抑制程度:長窗長能夠很好地抑制隨機噪聲,但是有用信號的幅值同樣會衰減;短窗長能很好地保留有用信號的幅值,但是并不能有效抑制噪聲。因此,TFPF中合適窗長的選擇成為信號有效去噪的關鍵環節。
本文提出了一種在EMD后TFPF時的窗長權衡方案,并將其應用于仿生偏振光羅盤系統去噪。即對含有用信號的低頻分量使用短窗長濾波,對含噪聲和有用信號的混合分量使用長窗長濾波,對更高頻的分量直接舍去。最后,將濾波后的低頻分量和混合分量重構得到去噪后的航向信號。經轉臺實驗和機載實驗驗證,該去噪方法優于小波分析和卡爾曼濾波算法。機載實驗條件下,航向角去噪后的精度可達0.3259°,比原始信號精度提高了18.4%。
1 原理
1.1 EMD原理
EMD將原始信號分解為多個從高頻到低頻的本征模態函數(Intrinsic Mode Function,IMF)分量和1個殘余分量。通常認為高頻的IMF分量主要含有噪聲成分,低頻分量及余項主要含有有用信號成分。即
(1)
其中,imfi(t)為第i個IMF分量;rn(t)為單調殘差序列。每個IMF分量必須滿足2個條件:
1)其極點個數和過零點個數相等或最多相差1個;
2)極值點構成的局部上下包絡線的均值為零。
對待處理的信號x(t)進行EMD的流程為:
1)對信號x(t)尋找其中所有局部極值點,包括極大值點和極小值點;
2)利用三次樣條插值對信號x(t)中的極大值點建立上包絡線xu(t),極小值點建立下包絡線xd(t);
3)計算上下包絡線的均值
(2)
4)提取細節
h(t)=x(t)-xa(t)
(3)
式中:若h(t)滿足IMF的上述2個條件,則此時h(t)即是滿足條件的一個IMF分量,否則對h(t)重復以上步驟1)~4),直至h(t)滿足均值條件;
實際運算過程中,需要計算hk(t)的標準差(Standard Deviation, SD)值,如果hk(t)的SD值小于設定的閾值,則hk(t)記為一個IMF分量imfi(t),否則,對hk(t)重復步驟1)~4),hk(t)的SD值計算公式如下
(4)
5)計算殘余信號分量ri(t)
ri(t)=x(t)-imfi(t)
(5)
余量ri(t)中仍包含有用信號,如果ri(t)的極值點數大于2,則跳轉至步驟1),按照上述步驟繼續對ri(t)進行分解;否則,分解過程結束。
從上述分解過程可以得到,偏振光定向系統輸出的航向角被分解為n個IMF分量和1個殘余項。低階分量包含高頻的高斯白噪聲,高階的IMF分量包含太陽方位角隨時間的變化和真實信號。實際的降噪過程中,如果能將IMF分量區分為真實信號部分、真實信號和噪聲的混合部分和噪聲部分三類,將能很容易地達到去噪的效果。因此,引入了樣本熵來對IMF分量進行評估。樣本熵反映了時間序列的復雜程度或不規則程度。樣本熵值越大,時間序列越復雜。它的值為時間序列中順序抽取的2個m維和2個m+1維序列在相似容限r下匹配概率之比的自然對數的相反數[16],即
(6)
1.2 TFPF原理
TFPF算法的基本思路是將含有大量隨機噪聲的信號調制成一個解析信號,然后計算解析信號的維格納-維利(Wigner-Ville)分布,將其峰值作為信號的瞬時頻率估計值,進而消除噪聲,得到去噪后的信號。
假設原始信號的模型為
x(n)=s(n)+r(n)
(7)
其中,s(n)為不帶噪聲的純凈信號;r(n)為噪聲信號;x(n)為混合后的含噪聲的待處理信號。n為采樣點。
利用TFPF去除信號噪聲的步驟如下:
1)首先,對包含噪聲的信號x(n)進行頻率調制,將其變為解析信號z(n)
(8)
式中,μ為與調頻指數類似的尺度縮放參數。
2)求取解析信號z(n)的偽維格納-維利分布頻譜
(9)
其中:z*(n)為z(n)的共軛函數;h(n)為選取的時變窗函數。本文通過調整窗函數來權衡抑制隨機噪聲和保持信號。
根據最大似然估計原理,求解析信號z(t)的PWVD分布頻譜的峰值,作為解析信號瞬時頻率估計,即可得到原始有用信號的幅值估計
(10)
1.3 聯合降噪算法
由于實際的含噪信號的每個模態分量不是純噪聲模態或者是純有用信號模態,而是有用信號成分和噪聲成分相互疊加的模態,所以需要判斷哪些模態需要進行濾波處理。此外,當樣本數據點較多時,如果將所有的IMF模態均進行TFPF,計算復雜度將會很大。
為了結合EMD和TFPF兩者在處理信號時的優勢,本文提出了基于兩者的聯合降噪算法。算法分為以下4個步驟,圖1所示為聯合降噪算法的步驟流程圖。
1)分解。將原始航向角信號根據EMD法分解為若干個IMF模態。
2)分類。計算各個IMF的樣本熵。將具有接近樣本熵的IMF函數劃分為一類。根據樣本熵的值,將IMF相應地分為低頻有用分量(LFU-C)、混合分量(M-C)和噪聲分量(N-C)三類。
3)去噪。從第二步可以得到,低頻有用分量由真實信號以及太陽方位角隨時間的變化組成,混和分量由真實信號和噪聲組成,噪聲分量由噪聲構成。考慮到TFPF的特點,為了盡可能地保護有用信號,選用短窗長處理低頻有用分量;為了盡可能地減少噪聲,選用長窗長處理混合分量;噪聲分量直接舍去。
4)重構。將濾波后的低頻有用分量和混合分量相加得到去噪后的最終信號。
對于仿生偏振光羅盤,輸出的航向角由偏振角和太陽方位角作和求得。由于太陽方位角由時間與當地經緯度獲得,與載體的運動狀態無關,因此,靜態試驗時太陽方位角隨時間變化比較緩慢。而偏振角包含了系統的測量誤差,所以將仿生偏振光羅盤輸出的航向角信號EMD后,低頻的IMF包含了太陽方位角隨時間的變化,而高頻的IMF則包含了偏振角的測量誤差。
2 實驗驗證
2.1 轉臺實驗
為了測試EMD-TFPF聯合去噪方法應用于仿生偏振光羅盤的定向精度,對系統進行了轉臺試驗,如圖2所示。實驗過程中,將成像式仿生偏振光羅盤安裝于多軸旋轉臺GT-111頂部與旋轉臺固連,水平放置,多軸旋轉臺GT-111由TMC-USB系列的控制器控制。其中旋轉滑臺的重復定位精度為0.005°。實驗中航向角數據以文本形式保存在成像式仿生偏振光羅盤當中。
圖3所示為轉臺實驗的航向角輸出信號的對比結果,實驗中共采集了165個數據點。對比時,求取各段航向角平均值作為參考基準,可以看出,實際的航向角輸出信號當中包含高斯白噪聲,這將嚴重影響成像式仿生偏振光羅盤的定向精度。因此,很有必要對原始航向角輸出信號進行去噪處理。所以,對轉臺實驗的航向角信號使用小波分析法、卡爾曼濾波法以及本文提出的EMD-TFPF聯合去噪方法分別進行了去噪。圖4所示為三種不同去噪方法處理后的航向角誤差對比。
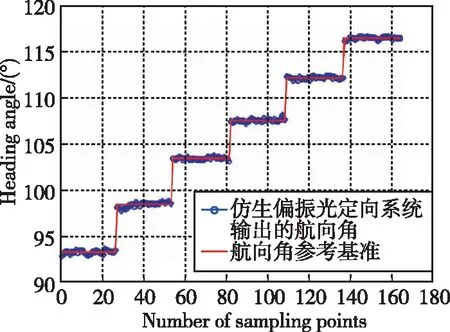
圖3 轉臺實驗航向角原始數據和參考基準對比

圖4 轉臺實驗中各種不同去噪算法求得的航向角誤差
圖5所示為將轉臺實驗采集的航向角信號進行EMD之后從低階到高階的各階模態分量。根據各階模態樣本熵值的大小,將SE值大于1.2的IMF定義為低頻有用分量(LFU-C),小于1.2并且大于0.6的IMF定義為混合分量(M-C),小于0.6的IMF定義為噪聲分量(N-C),并對LFU-C和M-C進行TFPF處理。圖6所示為各階模態的樣本熵值和對低頻分量采用短窗長濾波、對混合分量進行長窗長濾波后的TFPF效果圖。之后,舍去了噪聲分量,對濾波后的低頻分量和混合分量進行了重構,得到了去噪后的航向角信號。

圖5 轉臺實驗中原始信號EMD求得的各階IMF分量及余量

圖6 轉臺實驗中原始信號EMD求得的各階IMF分量的SE值和混合分量與低頻有用分量的TFPF結果
此外,對使用小波分析、卡爾曼濾波和EMD-TFPF三種濾波方法得到的航向角進行了對比,并計算了其誤差標準差和最大誤差,如表1所示。可以得到,與其他方法相比,本文提出的EMD-TFPF方法對成像式仿生偏振光羅盤的去噪效果最為顯著。

表1 轉臺實驗中三種不同方法輸出的航向角誤差對比表
2.2 機載實驗
為了測試去噪算法在實際機載飛行過程中的定向精度,對系統進行了機載實驗,機載實驗時的場景如圖7所示。

圖7 機載實驗時的場景
實驗過程中,將成像式仿生偏振光羅盤水平安裝于無人機頂部,并與載體固連。將高精度的分體式閉環光纖組合導航系統作為參考基準進行對比。其中高精度組合導航基準的定向精度為0.035°,輸出頻率為100Hz,成像式仿生偏振光羅盤的輸出頻率為10Hz。對成像式仿生偏振光羅盤同樣使用三種去噪方法進行去噪,并計算了誤差標準方差和最大誤差。實驗的對比結果如圖8、圖9和表2所示。
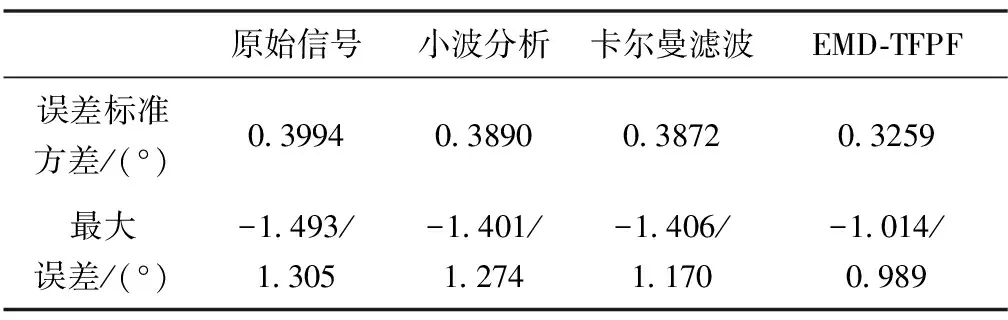
表2 機載實驗中三種不同方法輸出的航向角誤差對比表

圖8 機載實驗中各種不同去噪算法求得的航向角

圖9 機載實驗中各種不同去噪算法求得的航向角誤差
從實驗結果可以看出,與小波分析法和卡爾曼濾波法相比,EMD-TFPF聯合去噪方法的去噪效果最為顯著,將原始信號的精度從0.3994°提升到0.3259°,提升了18.4%。
3 總結與展望
本文研究了EMD和TFPF的基本原理,首次提出了將EMD-TFPF聯合去噪方法應用于仿生偏振光羅盤的航向信號。通過計算各個模態的樣本熵,將各階模態劃分為三類,選擇其中的低頻有用分量和混合分量進行TFPF,大大提高了TFPF的濾波效果。
通過轉臺試驗和機載實驗對算法的精度進行測試,驗證了去噪算法的有效性。實驗和對比結果表明,無論是在轉臺實驗還是機載實驗情況下,與傳統的小波算法和卡爾曼濾波算法相比,EMD-TFPF聯合去噪方法具有最佳的去噪能力,可以有效抑制仿生偏振光導航系統航向角輸出的高斯白噪聲。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00