基于速度積分匹配的旋轉調制慣導系統動基座對準方法
2021-09-28 06:36:54羅星航田曉春
導航定位與授時 2021年5期
羅星航,劉 峰,劉 輝,田曉春
(北京自動化控制設備研究所,北京 100074)
0 引言
現代戰爭中,空天是機動性十分強的重要戰場,機載武器則是空天戰場上制勝的利劍。隨著機載武器射程的不斷增大,要實現機載武器對目標快速、自主、精準的打擊,需提升慣性導航系統動基座對準的性能(如對準時間、對準精度),減小對基準信息品質和載體機動等的要求。
由于載體復雜的運動,動基座對準相較于陸基靜基座對準不可避免地引入了更多的誤差因素(如基準信息誤差、動態誤差等),導致動基座對準過程中基準信息品質受損,增加了慣性導航誤差激勵的復雜性,從而引起了附加的導航和觀測誤差。這些客觀因素限制了動基座對準精度與快速性的提升。
國內外對捷聯慣導系統空中動基座對準技術開展了廣泛的研究[1]。文獻[2-3]中,研究人員將自適應卡爾曼濾波理論與速度匹配相結合,通過載機S形機動實現了慣導動基座對準,獲得了較好的精度與魯棒性。劉旖旎對光學捷聯慣導系統空中動基座對準技術進行了研究[4],提出了一種分段式速度匹配傳遞對準方案應用于光纖捷聯慣導,試驗結果表明,該方法能較好地實現捷聯慣導空中對準,載機適當水平機動即可有效縮短對準時間。曲法義等研究了捷聯慣導系統速度+姿態矩陣匹配快速傳遞對準方案[5],通過載機做簡單角機動實現了對姿態誤差角的估計,但精度受撓曲變形影響。吳楓等提出了一種基于機載全球定位系統(Global Positioning System,GPS)信息的速度+位置匹配卡爾曼濾波精對準算法[6],在加減速或轉彎機動下實現了誤差量的有效估計。由文獻可知,捷聯慣導動基座對準技術多利用載體機動來提升對準精度和快速性,但載體機動對武器平臺提出了附加要求,增加了武器平臺工作的復雜性。
旋轉調制是慣導系統實現高精度導航的重要手段。旋轉調制慣導系統將慣性測量單元(Inertial Measurement Unit,IMU)固連于轉位機構,通過周期性旋轉調制慣性器件誤差,已廣泛應用于靜基座對準精度和長航時導航精度的提升;同時,利用旋轉調制消除慣性器件誤差的優勢,可以取消動基座對準對于載體的機動要求。針對衛星測速定位存在隨機誤差[7-10]、旋轉調制慣導存在觀測模型建立不準確等影響對準性能的問題,本文提出了一種衛星輔助速度積分方式的旋轉調制慣導動基座對準方法,通過提高衛星接收機的觀測速率、優化觀測模型,在一定程度上改善衛星數據噪聲對旋轉調制慣導高精度動基座對準的影響,從而提升對準的快速性和精度。
1 旋轉調制慣導系統動基座對準原理
1.1 旋轉調制慣導誤差分析
旋轉調制慣導系統相當于在捷聯慣導系統的基礎上增加旋轉機構和測角裝置,導航解算采用捷聯慣導算法,沒有改變旋轉調制慣導系統的慣性導航解算方法和慣性器件常值漂移,誤差方程與捷聯慣導系統一致[11]。
動基座對準過程中,慣性導航解算的結果與基準信息通過卡爾曼濾波進行匹配,以完成對初始誤差的估計。為了在保證對準精度的前提下盡量縮短對準時間,本文對準過程中采用單軸正反轉的旋轉方案,以航向作為旋轉軸并進行航向隔離。為適應導彈發射后的超聲速環境,脫離機體自主導航過程中慣導系統雙端鎖緊,為捷聯工作狀態。
本文中定義慣性坐標系為i系;導航坐標系為n系,按北天東方向配置;載體坐標系為b系,按前上右方向配置;彈體子慣導坐標系為s系,按前上右方向配置。導航坐標系下的姿態和速度誤差方程可表示為式(1)和式(2)
(1)


(2)

1.2 旋轉調制慣導動基座對準誤差方程
速度匹配動基座對準可以兼顧對準精度和快速性,根據慣導系統誤差方程,通過加減速或者轉彎可以提高航向失準角可觀測度,進而提高對準精度。旋轉調制慣導由于陀螺漂移和加速度計零偏可以忽略不計,因而可以通過羅經效應[12]實現較高精度的對準,從而取消對準對載體機動的要求和限制。為了獲得適合動態情況下基于羅經效應的慣導速度誤差方程,忽略垂向速度,慣導速度采用式(3)描述


(3)

速度誤差方程如式(4)


(4)
式中,WU為載體垂向比力,通過加速度計進行測量;RM、RN分別為地球子午圈和卯酉圈半徑;h為高度。令
(5)
式(5)所示的誤差方程建模分離了水平加速度對速度誤差的影響。
為了簡化旋轉調制慣導誤差方程,慣性導航解算過程中均采用基準信息計算載體速度引起的導航坐標系的轉動,姿態誤差方程可表示為式(6)

(6)
2 速度積分動基座對準
對準匹配方式可以依據所選量測參數的不同,分為計算參數匹配和測量參數匹配。計算參數匹配選取速度、位置等導航解算信息作為匹配的量測量;測量參數匹配則直接使用IMU測量得到的角速率、加速度和姿態信息進行匹配。一般來說,測量參數匹配方法的信息獲取直接,對準速度較快,但其精度受載體彈性變形的影響較大,通常用于對準精度相對較低的場合;而計算參數匹配通過觀測信息微分與濾波方式實現姿態對準,對準速度相對慢,但對準精度相對較高[13]。
對于旋轉調制慣導發揮精度潛力的關鍵之一就是高精度的對準,因此通常選擇基于衛星輔助的速度+位置組合導航方法進行對準。但衛星測速定位過程中存在隨機誤差,同時定位解算過程中也會產生隨機噪聲使速度量測量惡化,這些客觀因素影響了以衛星定位為基準信息的數據品質,進而影響了對準濾波器誤差估計的收斂性能。
實驗室靜態情況下,衛星接收機輸出的速度如圖1所示,雖然誤差統計優于0.1m/s(1σ),但仍然存在噪聲和相關性的誤差。當前衛星接收機定位解算技術成熟,獲取的衛星數據質量主要受限于衛星狀態本身以及信息傳輸過程中的損失,進一步提高衛星數據品質、降低噪聲,難度較大。提高接收機的數據更新頻率并將數據預先進行處理是提升衛星數據品質的有效方法。
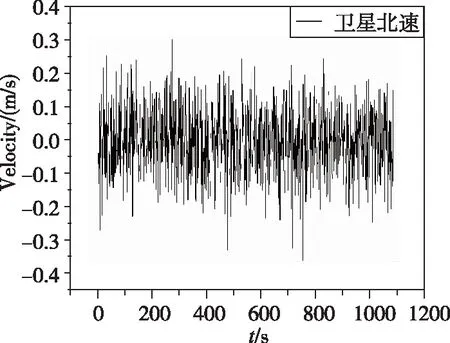
圖1 衛星觀測的北速
在現有衛星定位裝置精度條件下,保證慣導系統對準的性能,降低衛星數據測量噪聲的影響,可以考慮提高衛星數據更新頻率,在濾波周期內進行多次速度觀測,即速度積分匹配,通過速度積分獲得位移增量來提升觀測品質,降低噪聲并削弱誤差相關性。這種方法理論上能減小量測噪聲對濾波的影響,有效提高失準角估計精度[14]。
本文選取速度積分匹配卡爾曼濾波進行精對準。在濾波過程中,將彈體子慣導測得的速度與衛星觀測速度分別積分再做差作為量測量。
衛星速度積分為
(7)
彈體子慣導速度積分為
(8)
δL=Ls-Lgps=∑VsTM-∑VgpsTM=∑δVTM
(9)
其中,衛星數據以gps為上標,彈體子慣導系以s為上標;TK為卡爾曼濾波周期,TM為量測更新周期,N=TK/TM為一個卡爾曼濾波周期中量測量的更新次數;Vk為每個量測更新周期中的速度量測量。結果近似于將導航解算的子慣導與衛星觀測速度誤差以量測時間為間隔在整個卡爾曼濾波周期中累積相加。
卡爾曼濾波算法本質上是一種線性最小方差估計,在假設已知系統噪聲和測量噪聲的情況下,通過測量數據對系統狀態進行估計。
動基座對準過程中的卡爾曼濾波模型如下

Z=HX+υ
(10)

3 仿真驗證
為驗證本文提出的方法與傳統速度+位置匹配方式在減弱衛星數據噪聲影響、提高誤差量估計收斂速度方面的優越性,在實驗室靜態和車載試驗環境下進行仿真分析。

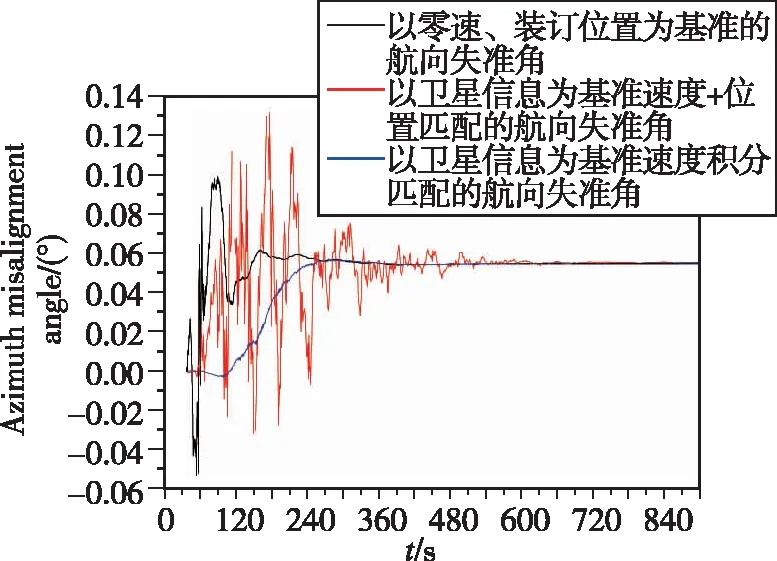
圖2 實驗室靜態環境下兩種基準信息匹配的航向失準角估計值
由圖2可以看出,在實驗室靜態環境下,相較于無噪聲的基準信息,以衛星信息為基準應用經典組合導航方法估計的航向失準角噪聲更大,收斂時間更長,收斂情況變差。同樣使用衛星信息為基準時,速度積分方式估計的航向失準角能在255s之后收斂,而速度+位置匹配方式估計的航向失準角在380s之后才趨于穩定。速度積分相較于速度+位置,不僅收斂時間短,超調量也小。
車載動基座對準試驗一共進行了7次,選取其中一次車輛運動軌跡及行駛速度,如圖3和圖4所示,對準過程中車輛正常行駛。
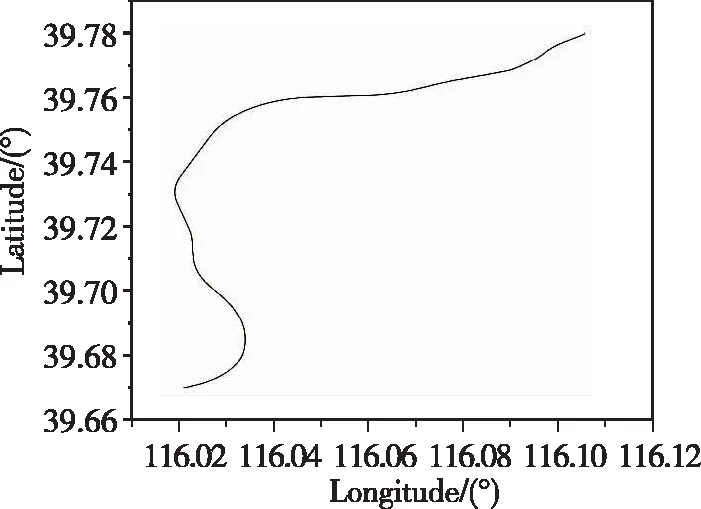
圖3 車輛對準路線
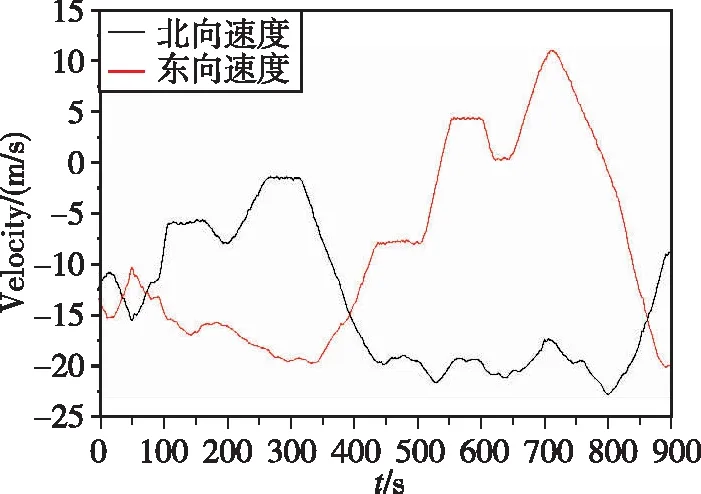
圖4 對準中車輛行駛速度
車載環境下,速度積分匹配方式航向失準角估計值、對準后1h的導航速度誤差及陀螺漂移估計值曲線如圖5~圖7所示。
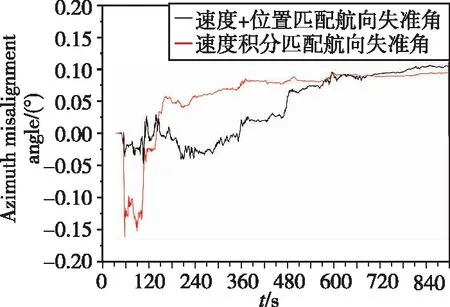
圖5 車載試驗兩種匹配方式的航向失準角估計值
圖5為車載環境下,兩種匹配方法的航向失準角的估計情況。可以看出,車載環境下速度積分匹配方法的航向失準角在387s之后收斂平穩,且582s后穩態峰峰值波動小于20″;速度+位置匹配方式估計的航向失準角在650s才逐漸趨于收斂,一直到780s穩態值仍有一定的斜率。兩者水平失準角的估計均能在100s~200s左右收斂,且精度相當,速度積分匹配方式比速度+位置匹配方式稍快。
圖6為900s精對準結束后,系統捷聯慣性導航解算的速度誤差和位置誤差,導航1h,除去數據異常跳點,慣性北向誤差最大0.7m/s、東向速度誤差最大0.4m/s。
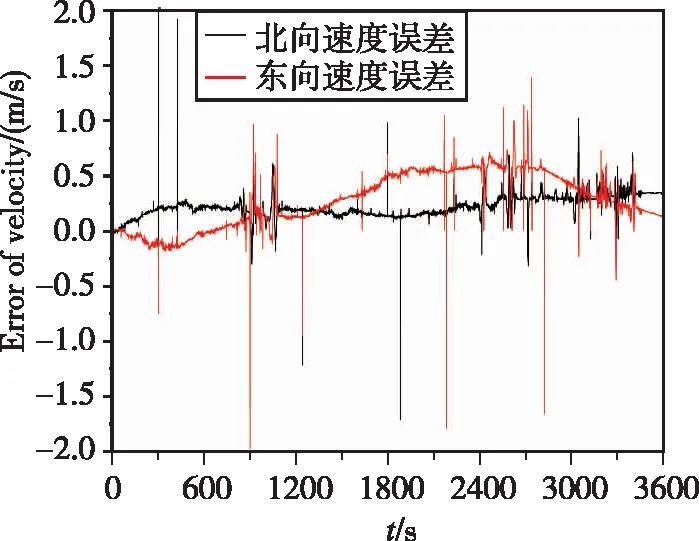
圖6 車載試驗速度積分匹配對準后導航1h的速度誤差
綜上,試驗數據表明,旋轉調制把等效東向陀螺漂移控制在優于0.001(°)/h的量級,從而更好地利用羅經效應進行高精度對準,取消了對載體機動的要求。本文速度積分匹配方法動基座對準航向收斂在400s以內,600s以內峰峰值波動小于20″。導航1h,北向速度誤差在0.7m/s以內,東向速度誤差最大0.4m/s,失準角估計的收斂速度快于傳統速度+位置匹配方法,在縮短航向失準角收斂時間的同時有效提高了航向對準精度。
旋轉調制慣導速度積分匹配方式估計的水平方向上陀螺漂移如圖7所示。由圖7可見,旋轉調制后慣導系統陀螺漂移趨近于零,不會產生與羅經效應耦合的等效東向漂移,不再需要載體進行加減速或轉彎等機動來分離陀螺漂移和航向失準角。
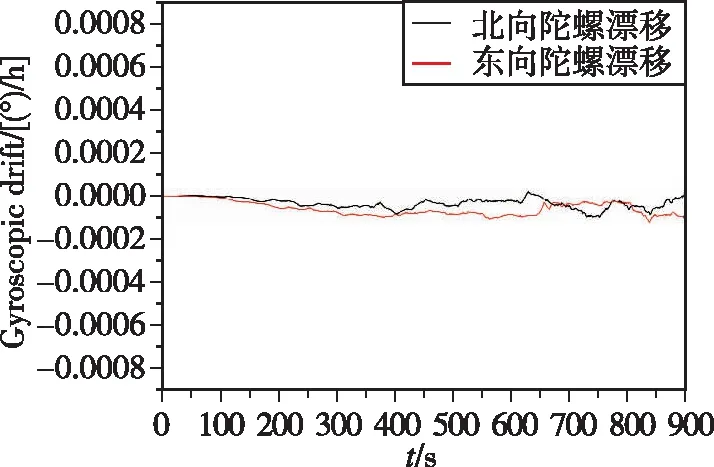
圖7 速度積分匹配方式估計的水平陀螺漂移
4 結論
本文針對旋轉調制慣導高精度快速對準的需求,分析了旋轉調制慣導動態環境下的誤差特性,推導出適應動基座對準的誤差模型;提出了基于旋轉調制慣導的速度積分匹配快速動基座對準方法,在實驗室靜態環境和車載環境下分別開展仿真實驗,分析實驗結果得到如下結論:
1)在靜態環境下,以零速作為基準信息對準的濾波器收斂時間更短,收斂曲線更平滑,即基準信息的品質影響對準的時間長短和精度高低;
2)在現有的衛星接收機(基準信息)精度條件下,該方法相對速度+位置匹配方式能降低基準信息噪聲的影響,提升了衛星輔助動基座對準濾波估計的收斂速度;
3)在車載動態環境下,該方法對準快速性和精度優于組合導航速度+位置匹配方式。