高性能變傳動比的異形齒輪跳躍機構研究*
2021-09-27 06:47:12劉磊,張巖
機電工程 2021年9期
關鍵詞:設計
劉 磊,張 巖
(1.包頭鋼鐵職業技術學院 機械工程系,內蒙古 包頭 014010;2.河北科技大學 機械工程學院,河北 石家莊 050018)
0 引 言
在機器人系統的機械設計中,常利用減速器來改變執行機構的性能,最典型的應用就是跳躍機器人。一般情況下,由于傳動比是一個常量,機器人會根據運動和任務選擇合適的傳動比[1,2],例如當需要較大扭矩時,通過犧牲角速度來選擇較小的傳動比。但是,實際情況中,許多任務同時需要大扭矩輸出和高速來實現[3,4],例如搬運重物等。針對這些任務,變傳動比在連續運動方面是有效的,且不需要更換齒輪。
到目前為止,已有許多關于跳躍機器人的研究。ASILOPOULOS V等[5]提出了足部關節處的力多邊形,根據每個關節上的力控制器來研究著陸特性。VERSTRATEN T等[6]提出了一種串聯彈性雙電機驅動的跳躍機器人。
但是,上述這些方法集中在穩定跳躍的控制上,無法實現大扭矩輸出和高速度變化。因此,變傳動比成為了目前研究的熱門方向。BHATTI J等[7]提出了適用于敏捷跳躍機器人的自適應高度控制器。BAI L等[8]提出了仿生間歇跳躍機器人設計,并對其變傳動比機構進行了動力學分析。
在上述這些機構中,機器人通過彈簧或慣性力積累的能量來實現更高的跳躍,但并非所有的能量都可用于跳躍,可能會消耗執行器大量能量,而降低電機運行效率。
因此,本文以有效利用電機功率為目標,提出一種跳躍運動最優變傳動比的設計方法,并通過異形齒輪實現所獲得的變傳動比;同時,提出一種異形齒輪的齒形(節曲線)設計方法,并通過原型對該設計方法的有效性進行評價;此外還研究跳躍高度隨機器人參數和初始姿態擾動的變化。
1 跳躍機器人與最佳傳動比
1.1 傳動比的優化
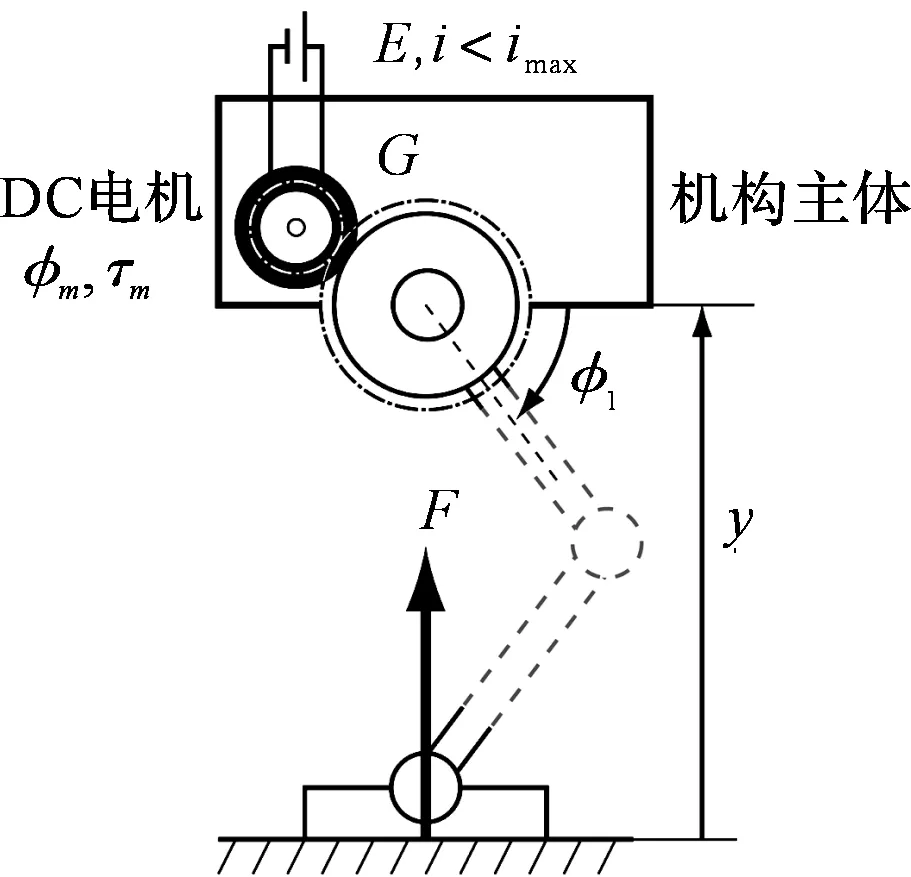
首先,需要推導出使地面作用力最大的最佳傳動比。跳躍機器人機構及其運動示意如圖1所示。
(a)跳躍機器人的機構
φm—電機的旋轉角度;τm—電機的輸出扭矩;EZC—電機供電的恒定電壓;i—電機電流;imax—電機電流的最大值;φ1—腿部連桿的旋轉角度;G—傳動比;y—主體高度;F—垂直于地面的作用力
如圖1(a)所示,直流電機安裝在機器人主體上。
φm與φ1之間的關系如下:
(1)
本部分不考慮腿部機構的結構,但假定其φ1與主體高度y之間的運動關系為:
(2)
此外,由于運動學上的限制,機器人主體的運動被限制在垂直于踝關節和髖關節中心的垂直線上,如圖1(b)所示,這表明機器人具有一個自由度。
電機扭矩τm產生垂直地面的力F,考慮最大化F來設計最佳傳動比。
機器人的動能e表示為:
(3)
式中:yoff—機器人起跳時的主體高度。
機器人在F<0時起跳。F越大,則跳躍越高。
根據電機端子之間的電壓關系[9],可推導出以下等式:
(4)
式中:R—電機電阻;L—電機電感;Ka—扭矩常數。
假設L可以忽略不計,則i表示為:
(5)
且τm可表示為:
(6)
另一方面,根據式(1,2)和虛功原理,F可表示為:
F=(GJ)-1τm
(7)
將式(2)和式(6)代入式(7),得到:
(8)

(9)
另一方面,電機功率P可表示為:
(10)

1.2 基于正向動力學分析的節圓半徑設計
步驟1:機器人動力學由下式表示:
(11)
式中:Mm—慣性;Cm—離心項;Km—重力項。

(12)

由式(1)對時間的微分可得:
(13)
由式(13)的二階積分計算得到φl。
?G/?φm的近似值為:
(14)
式中:ΔG—當前迭代與前一次迭代之間的G差值;Δφm—當前迭代與前一次迭代的φm差值。
步驟4:根據式(8),使用式(2)計算F。當F>0時,轉到步驟2,重復相同的過程;當F≤0時,停止迭代。
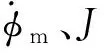
通過上述過程,可以得到的φm和G如圖2所示。
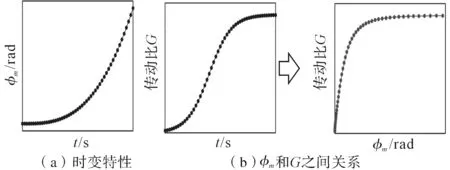
圖2 得到的φm和G
φm和G的時間變化如圖2(a)所示,且得到了φm和G的關系G=G(φm)如圖2(b)所示。
將輸入和輸出異形齒輪中心之間的距離定義為d,輸入齒輪rin的節圓半徑可通過以下公式獲得:
(15)
輸入齒輪的節圓半徑如圖3所示。
圖3 輸入齒輪的節圓半徑
輸出齒輪rout的節圓半徑也采用同樣的方法得到。
2 跳躍機構與異形齒輪的設計
2.1 跳躍機構設計
在這一部分中,筆者為跳躍機器人設計了一個非圓形齒輪。跳躍機器人的結構如圖4所示。
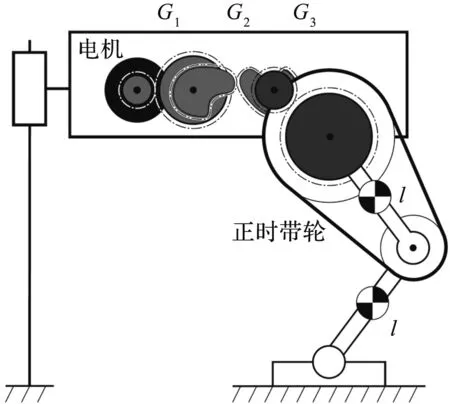
圖4 跳躍機器人的結構
圖4中:齒輪1、2和3的傳動比分別為G1、G2和G3,其中,G1較小以增加扭矩,G2為由異形齒輪實現的變傳動比,而G3大于1,以擴大異形齒輪的有效區域,因為腿旋轉角度小于90°。對于該跳躍機構,圖1(a)中的G由G=G1G2G3表示。主體的運動由線性滑塊限制在垂直方向。大腿和小腿由正時帶輪連接。正時帶輪的傳動比為2。
將大腿和小腿的長度設置為l,式(2)中的J由下式表示:
J=2lcos(φl+φI0)
(16)
最佳傳動比G2由下式給出:
(17)
式中:φl0—φl的初始值。
2.2 異形齒輪的齒形設計
基于所提齒形設計方法,筆者設計了一種異形齒輪。異形齒輪不能實現零傳動比,即具有最小傳動比G2min。
G2min為0.1和1時的仿真結果對比如圖5所示。
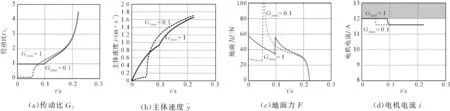
圖5 G2min為0.1和1時的仿真結果對比
由圖5可知:
(1)G2min為0.1時,傳動比在運動開始時受到G2min的限制。如圖5(a)中虛線所示:0.051 s之后,G2的變化較大,它的變化過大導致主體速度和地面力的變化很大,還產生了較大的輪齒壓力角。
根據圖5(b)中虛線所示,起跳時的主體速度為1.69 m/s,產生了0.124 m的跳躍高度。跳躍高度的定義如圖6所示。
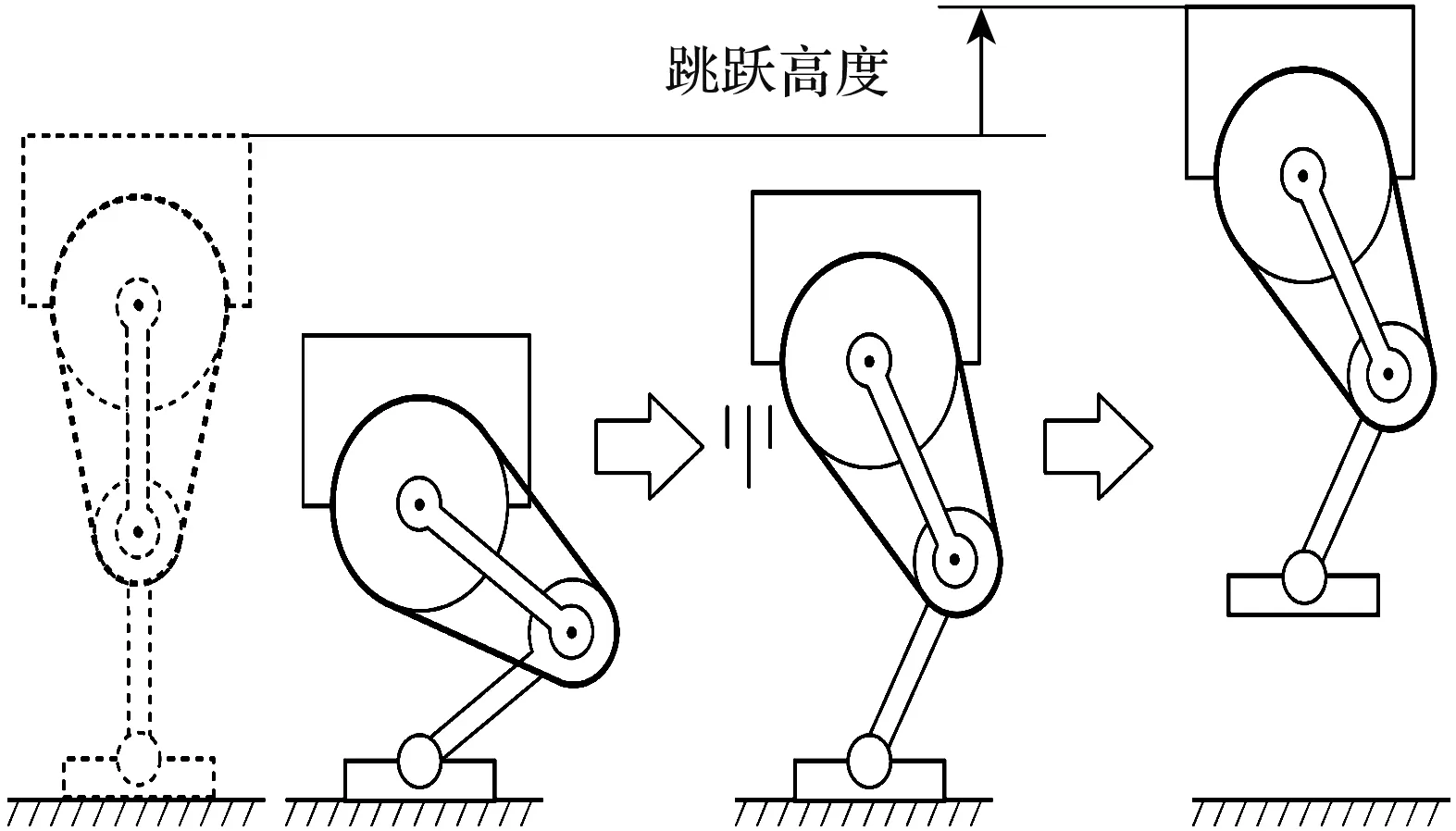
圖6 跳躍高度的定義
由于受輪齒壓力角的限制,異形齒輪無法實現所獲得的傳動比,因為G2min為0.1太小了;
(2)G2min為1時,機器人在0.221 s時起跳,主體速度為1.64 m/s,跳躍高度為0.117 m(僅比G2min為0.1時低5.6%)。
異形齒輪的齒形(節曲線)如圖7所示。
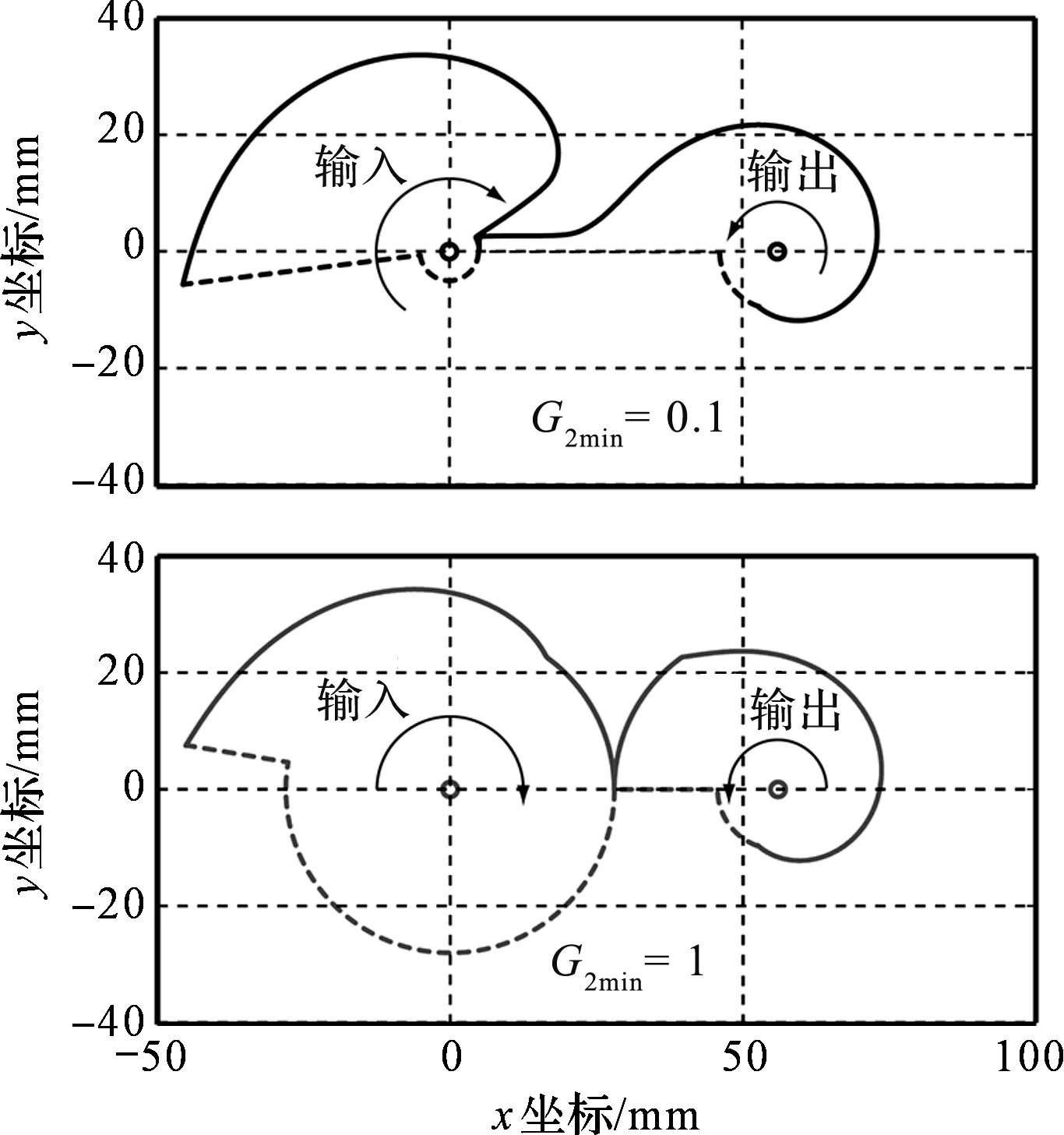
圖7 異形齒輪的齒形(節曲線)
輪齒壓力角如圖8所示。
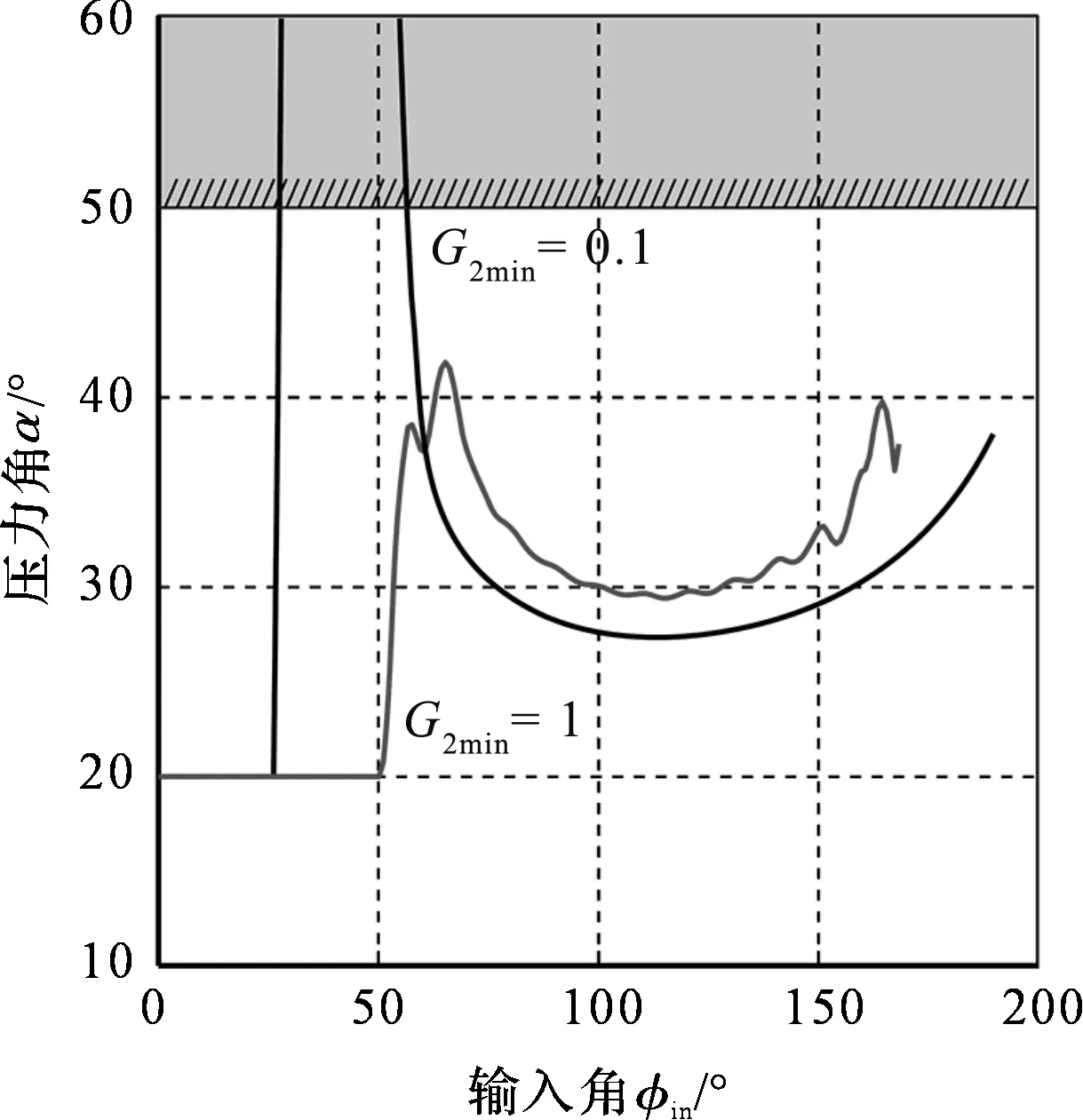
圖8 輪齒壓力角
壓力角α的定義如圖9所示。
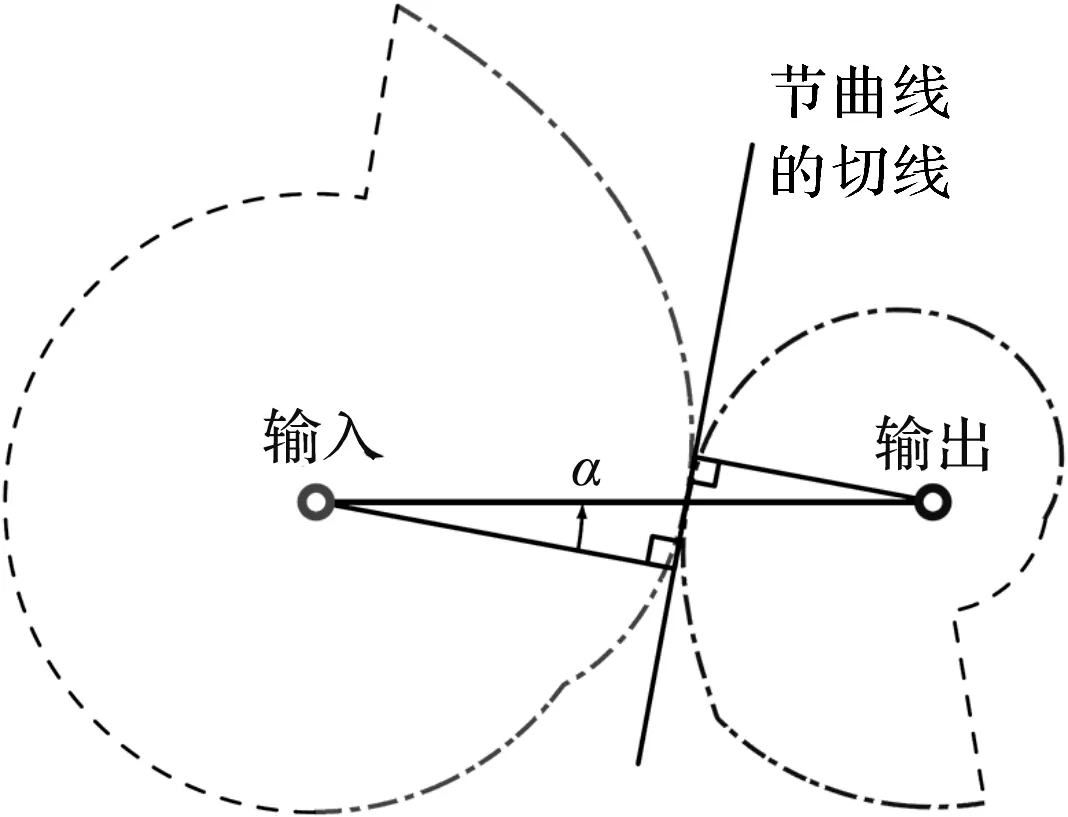
圖9 壓力角α的定義
輸入和輸出齒輪中心之間的距離為0.056 m。從圖9可以看出,通過設置G2min為1,輪齒壓力角的變化小于50°[14-16]。
2.3 與圓形齒輪的比較
為了說明異形齒輪的有效性,筆者計算了采用圓形齒輪的最佳恒定傳動比。恒定傳動比與跳躍高度的關系如圖10所示。
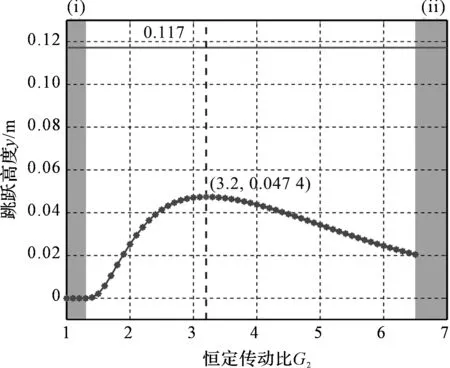
圖10 恒定傳動比與跳躍高度的關系
圖10中,將G2設定為常量,通過仿真計算跳躍高度。在灰色區域(i)中,機器人由于傳動比小(主體速度小)而無法跳躍;在區域(ii)中,機器人由于傳動比大、扭矩小而不能站立。
可以看出:G2為3.2時機器人的最大跳躍高度為0.047 4 m,遠小于使用異形齒輪時的跳躍高度(0.117 m,G2min為1)。
為了研究其原因,筆者對電機功率和功耗進行了計算。電機功率對比如圖11所示。
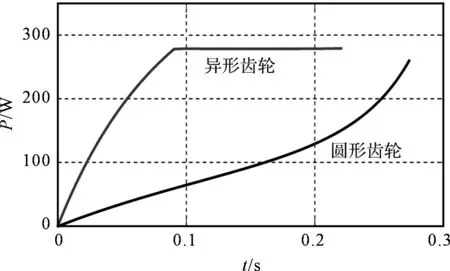
圖11 電機功率對比
電機功對比如12所示。
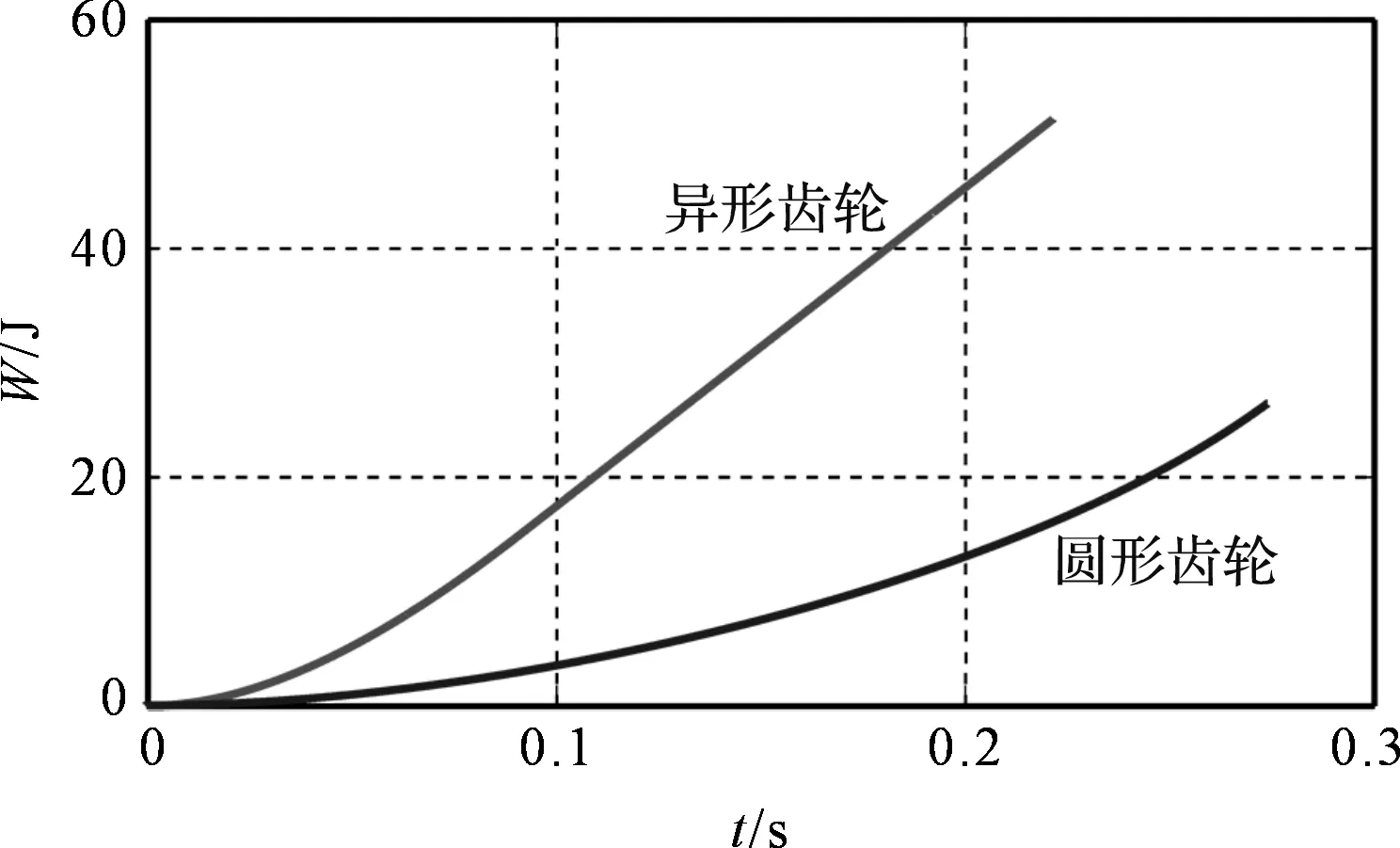
圖12 電機功對比
2.4 跳躍高度對參數擾動的敏感性
圖7中,異形齒輪是基于正向動力學分析為指定的機器人和指定的初始位置設計的(M為1.65 kg,φ10為10°),有必要評估跳躍高度相對于參數擾動的變化。因此,筆者根據重量擾動ΔM和角度擾動Δφ10計算了跳躍高度的變化。
相對于重量擾動的跳躍高度變化如圖13所示。
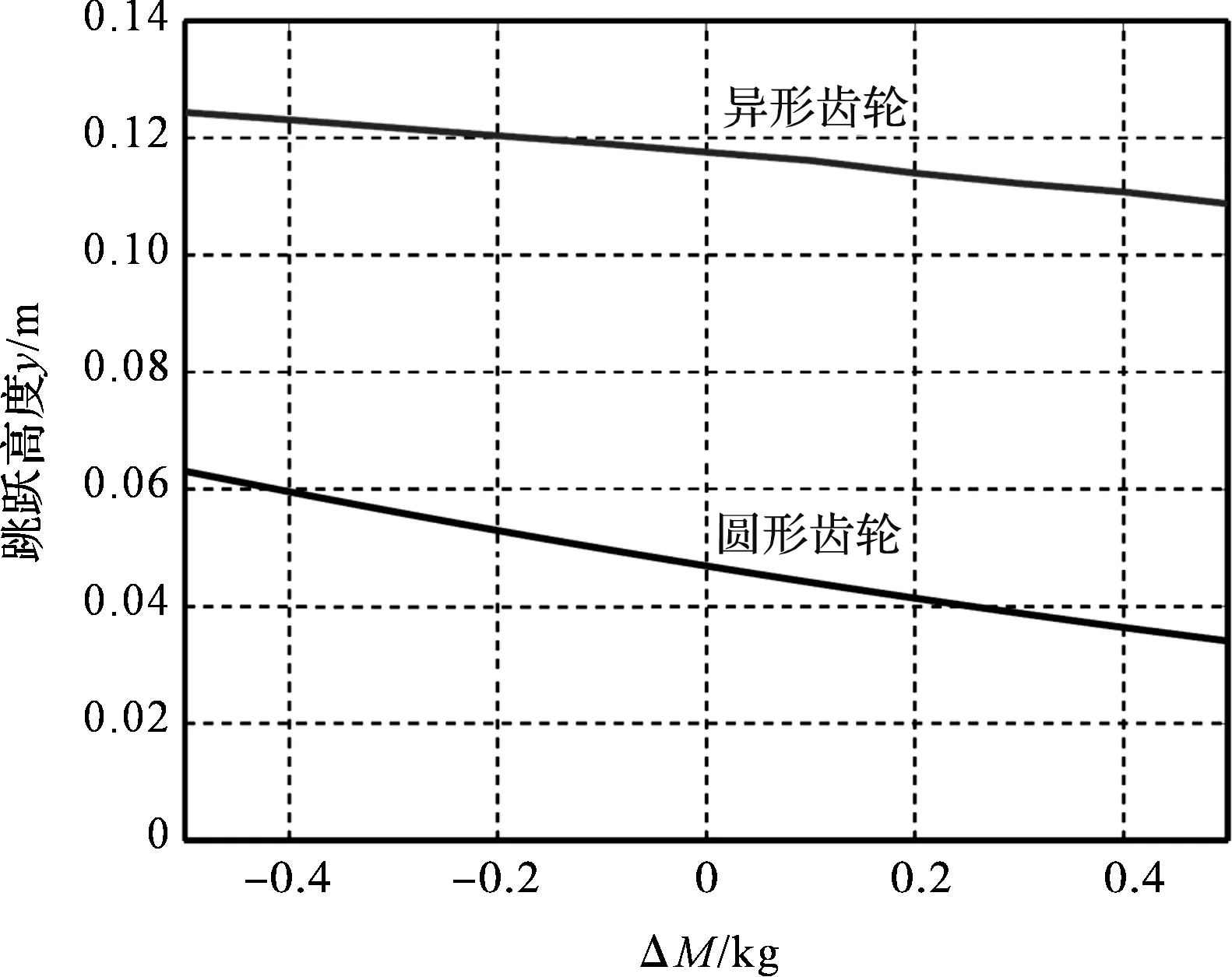
圖13 相對于重量擾動的跳躍高度變化
相對于角度擾動的跳躍高度變化如圖14所示。
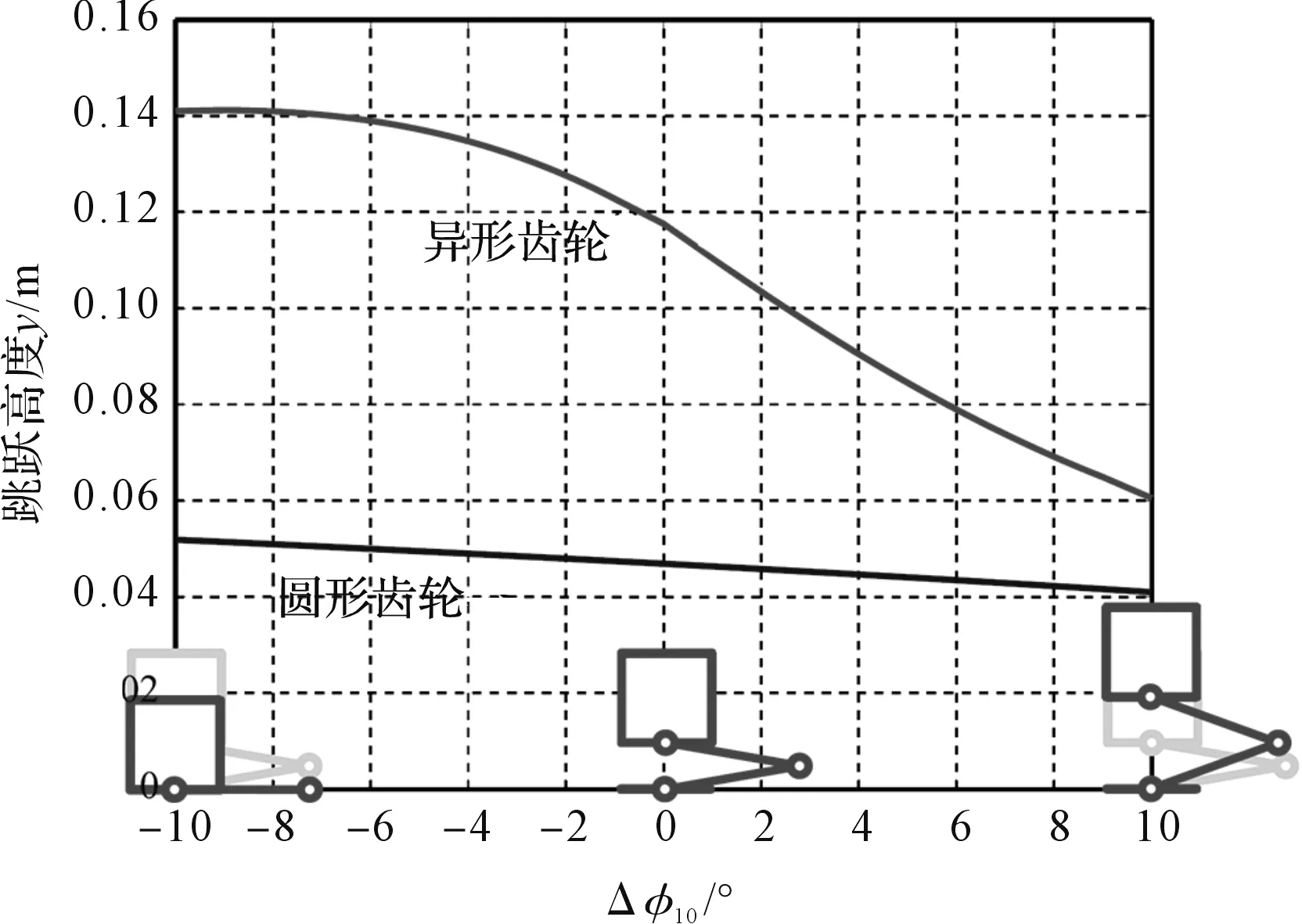
圖14 相對于角度擾動的跳躍高度變化
從動力學的角度來看,不管使用圓形齒輪還是異形齒輪,即使是較輕的重量和較小的初始角度也會產生較高的跳躍高度。然而,在參數擾動的所有情況中,異形齒輪均獲得了比圓形齒輪更高的跳躍高度。
3 實驗結果與分析
3.1 原型機
筆者設計并制造了一個跳躍機構的原型,重量M為1.65 kg,l為0.15 m,G1為1/28,G3為1/5。采用了MAXON公司的4.90W-DC電機,其電阻R為2.07 Ω,扭矩常數Ka為52.5×10-3Nm/A,E為48 V,限流imax為12 A,φ10為10°。
跳躍機構的原型如圖15所示。
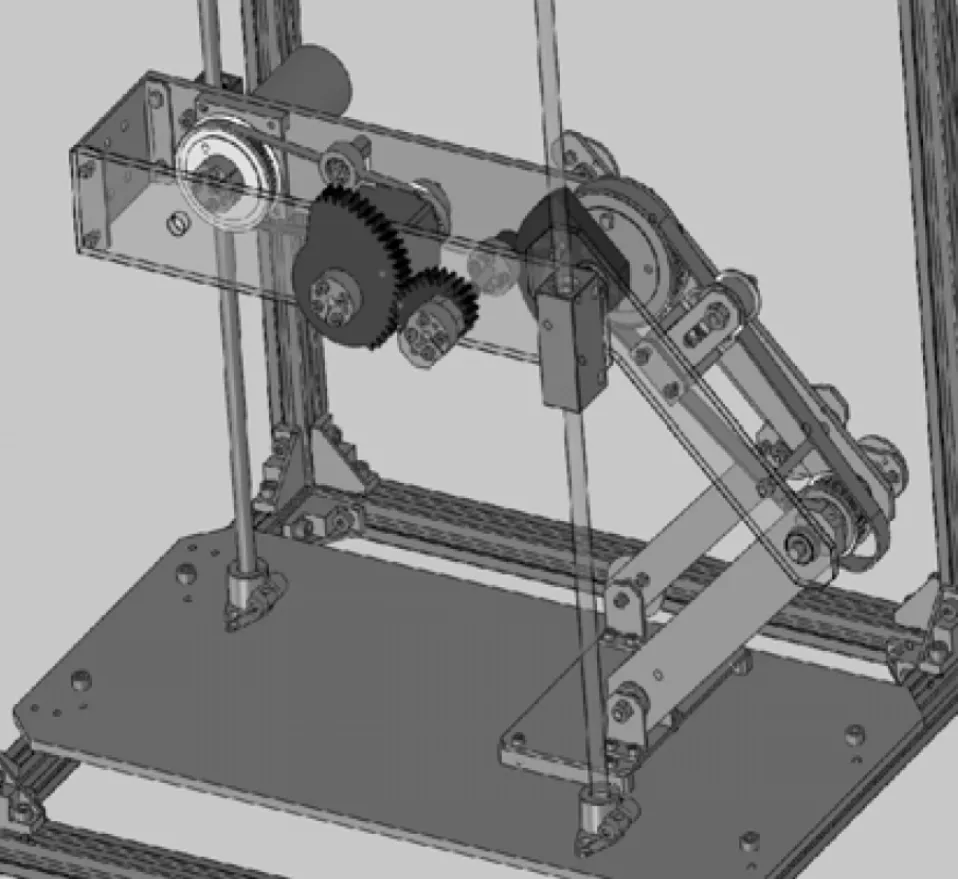
(a)三維CAD模型
根據圖7中的節曲線,筆者制作了一個異形齒輪的原型。由于圖7中的俯仰曲線有一個不可微分點,此處采用樣條插值,以便獲得光滑的曲線。
異形齒輪的厚度為10 mm,模數為1.5,制造材料為合金工具鋼(SKD11)。異形齒輪的原型如圖16所示。
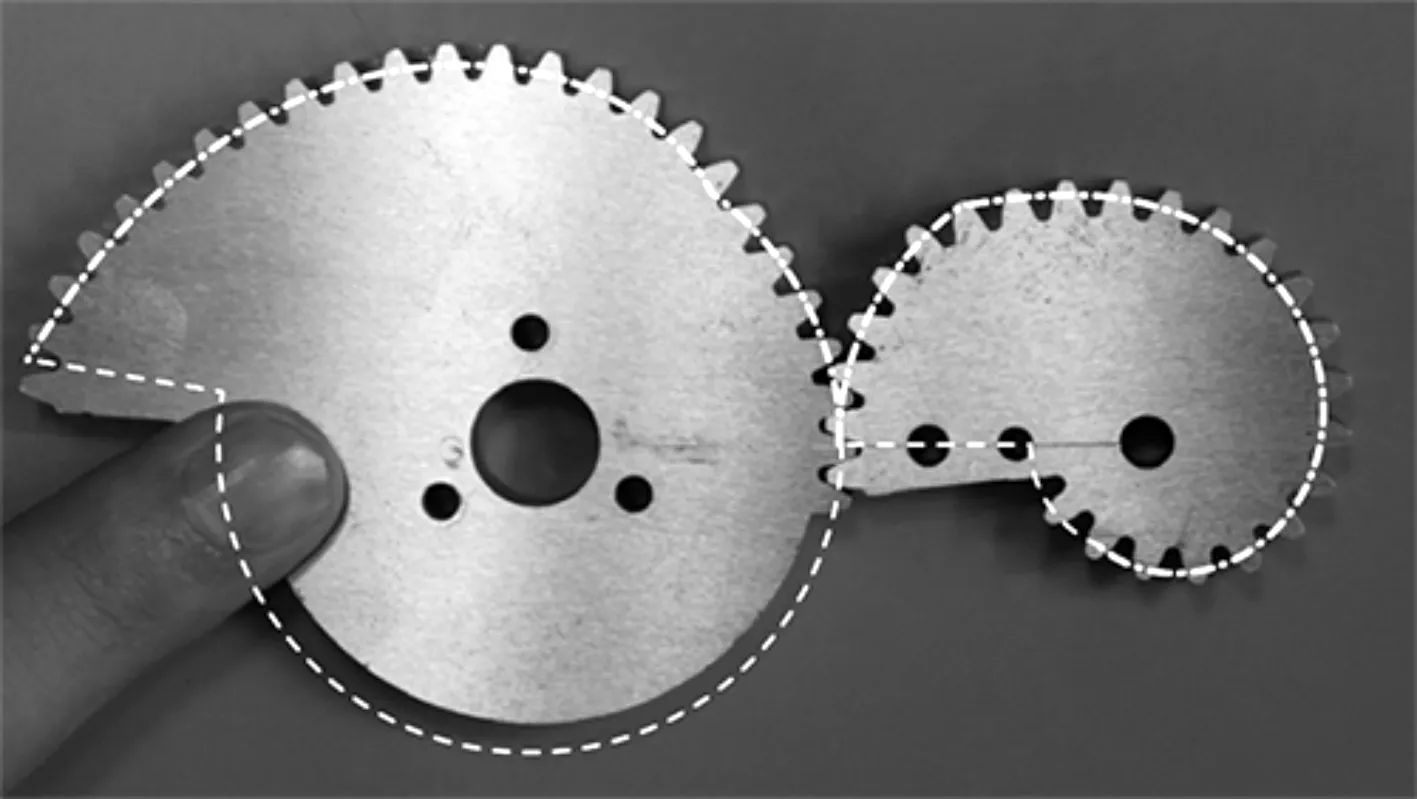
圖16 異形齒輪的原型
3.2 跳躍實驗
筆者利用異形齒輪(G2min為1)和圓形齒輪進行了跳躍實驗,跳躍實驗結果對比如圖17所示。
(a)異形齒輪,0.0 s

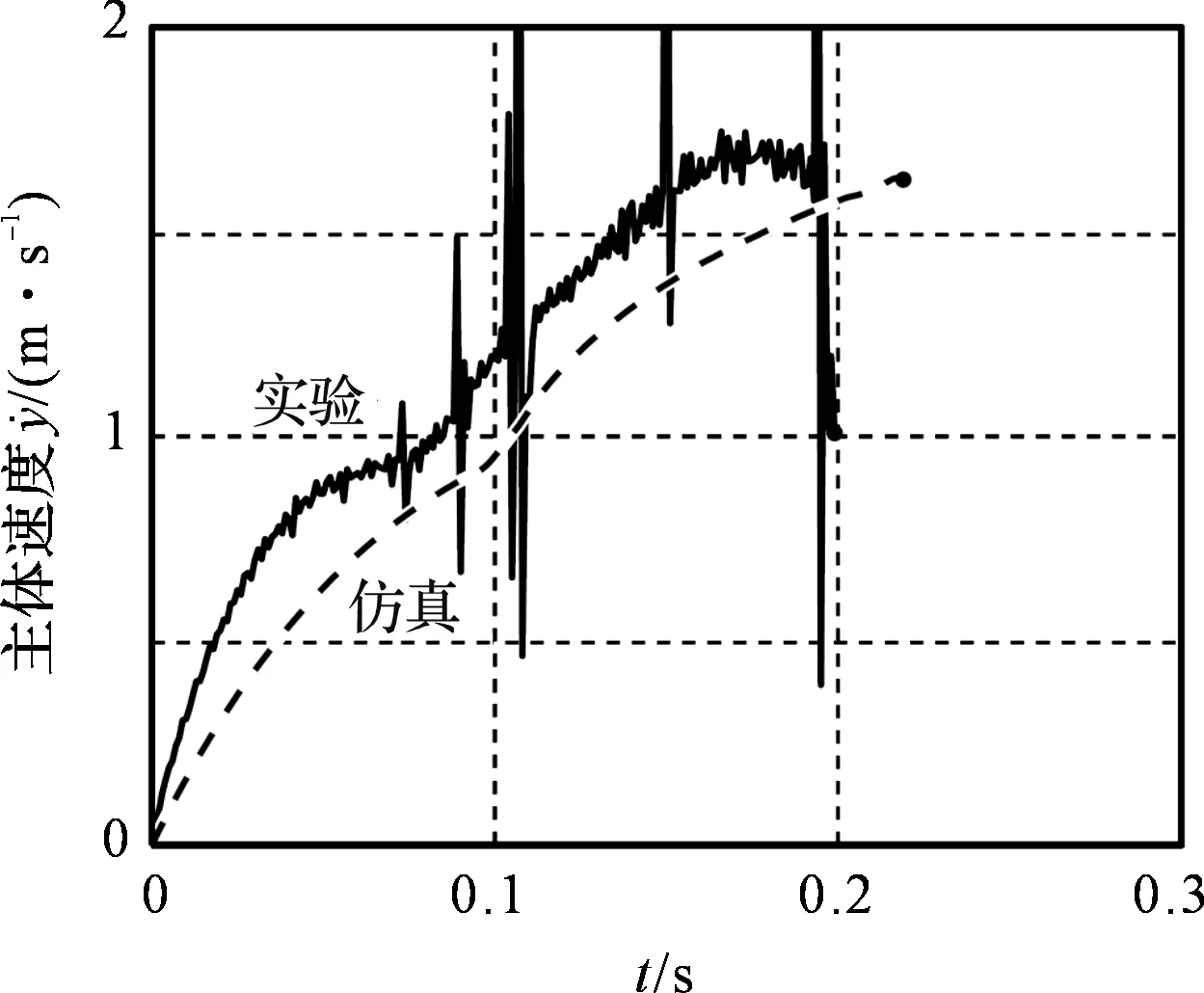
圖18 實驗和仿真的比較
相對于初始姿態擾動的跳躍高度變化如圖19所示。
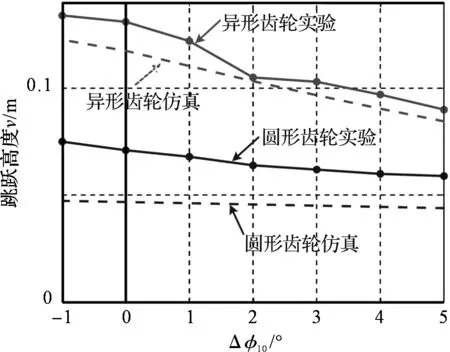
圖19 相對于初始姿態擾動的跳躍高度變化
圖19與仿真結果(圖14)相同,采用異形齒輪時,在初始姿態擾動的所有情況中,其跳躍高度都大于圓形齒輪。
4 結束語
本文提出了一種適用于跳躍機構的齒輪最優變傳動比設計方法,并采用異形齒輪對其進行了具體實現,有效地提高了電機效率;通過變傳動比跳躍機構原型的實驗測試,得出了如下結論:
(1)采用異形齒輪的跳躍高度為0.135 m,為圓形齒輪的1.68倍,說明采用異形齒輪的電機功率比采用圓形齒輪的電機功率要大得多;
(2)由于所提出的方法是基于正向動力學分析的,結果依賴于機器人物理參數的擾動。然而,在參數擾動的所有情況中,異形齒輪均獲得了比圓形齒輪更高的跳躍高度。
在后續的研究中,筆者將在無支撐連桿條件下,對異形齒輪進行跳躍測試,以便針對其穩定性開展進一步的分析。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
