在CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)應(yīng)用中多電動機(jī)同步控制系統(tǒng)可靠性的實現(xiàn)
2021-09-25 09:35:04孫波涂凌志李義劉光虎范志勇張良
機(jī)械工程師 2021年9期
關(guān)鍵詞:檢測
孫波,涂凌志,李義,劉光虎,范志勇,張良
(中聯(lián)恒通機(jī)械有限公司,長沙 410131)
0 引言
在CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)應(yīng)用中,由于CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)本身對于可靠性的特殊要求,多電動機(jī)同步控制系統(tǒng)的可靠性是一個非常重要的問題。尤其是多頂升體在多臺伺服電動機(jī)進(jìn)行同步頂升時,必須保證頂升動作的同步一致性要求,防止負(fù)載發(fā)生偏移甚至傾覆。
控制系統(tǒng)的可靠性是指系統(tǒng)在規(guī)定的條件下和規(guī)定的時間內(nèi),完成規(guī)定功能的能力[1]。可靠性主要表現(xiàn)在它的可使用性、可維護(hù)性、有效性和安全性等幾個方面。可使用性是指系統(tǒng)在規(guī)定的條件下和規(guī)定的時間內(nèi)使用的無故障性或使用壽命。可維護(hù)性是指系統(tǒng)在規(guī)定的條件下和規(guī)定的時間內(nèi)按規(guī)定的方法或程序進(jìn)行維修后,保持或恢復(fù)到規(guī)定狀態(tài)的能力[1]。有效性是指系統(tǒng)在特定條件下能夠發(fā)揮出色功能的概率。安全性是指系統(tǒng)在能夠保證可靠地完成其規(guī)定功能的前提下能保證操作人員與維護(hù)人員的人身安全[1]。可靠性指標(biāo)通常用概率來定義,常用的指標(biāo)主要有可靠度、失效率、平均故障間隔時間、平均故障修復(fù)時間、平均壽命、利用率等。提高控制系統(tǒng)可靠性的措施主要有:1)提高元器件和設(shè)備的可靠性;2)提高控制系統(tǒng)的抗干擾能力;3)故障自診斷和容錯技術(shù);4)采用分散化結(jié)構(gòu)。
CAP1400屏蔽主泵安裝小車頂升載荷電氣控制系統(tǒng)如圖1和圖2所示,主要由控制器、伺服驅(qū)動器、伺服電動機(jī)、旋轉(zhuǎn)變壓器(伺服電動機(jī)自帶)、激光測距傳感器、測力螺栓、信號調(diào)理器、I/O模塊(就地)、手持操作器等組成。為實現(xiàn)通過對頂升受力、位置、運行速度等的實時檢測來實現(xiàn)頂升機(jī)構(gòu)的運動與負(fù)載平衡,其監(jiān)控系統(tǒng)的可靠性及策略主要由以下幾點來實現(xiàn)。
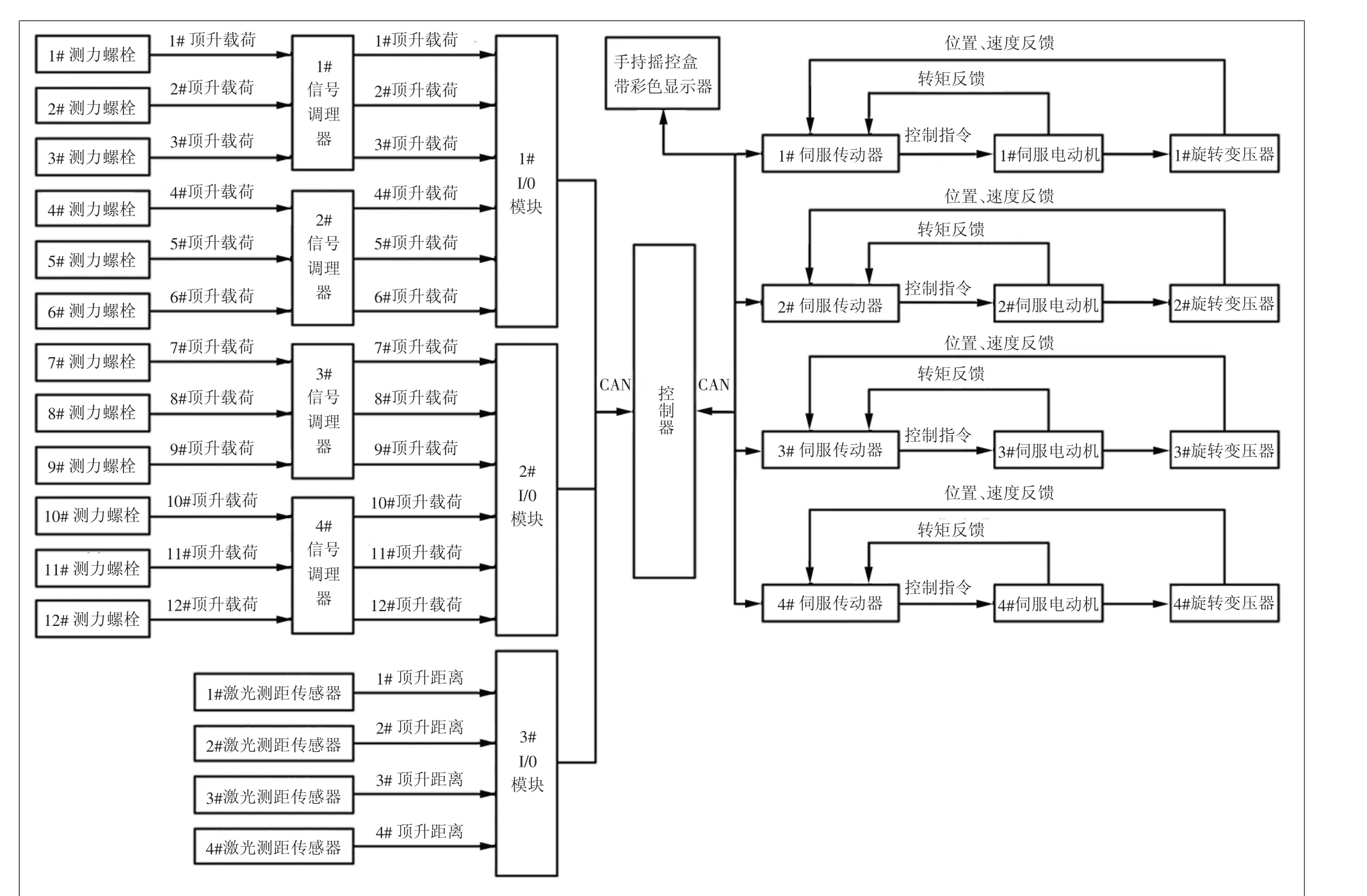
圖1 控制系統(tǒng)組成圖
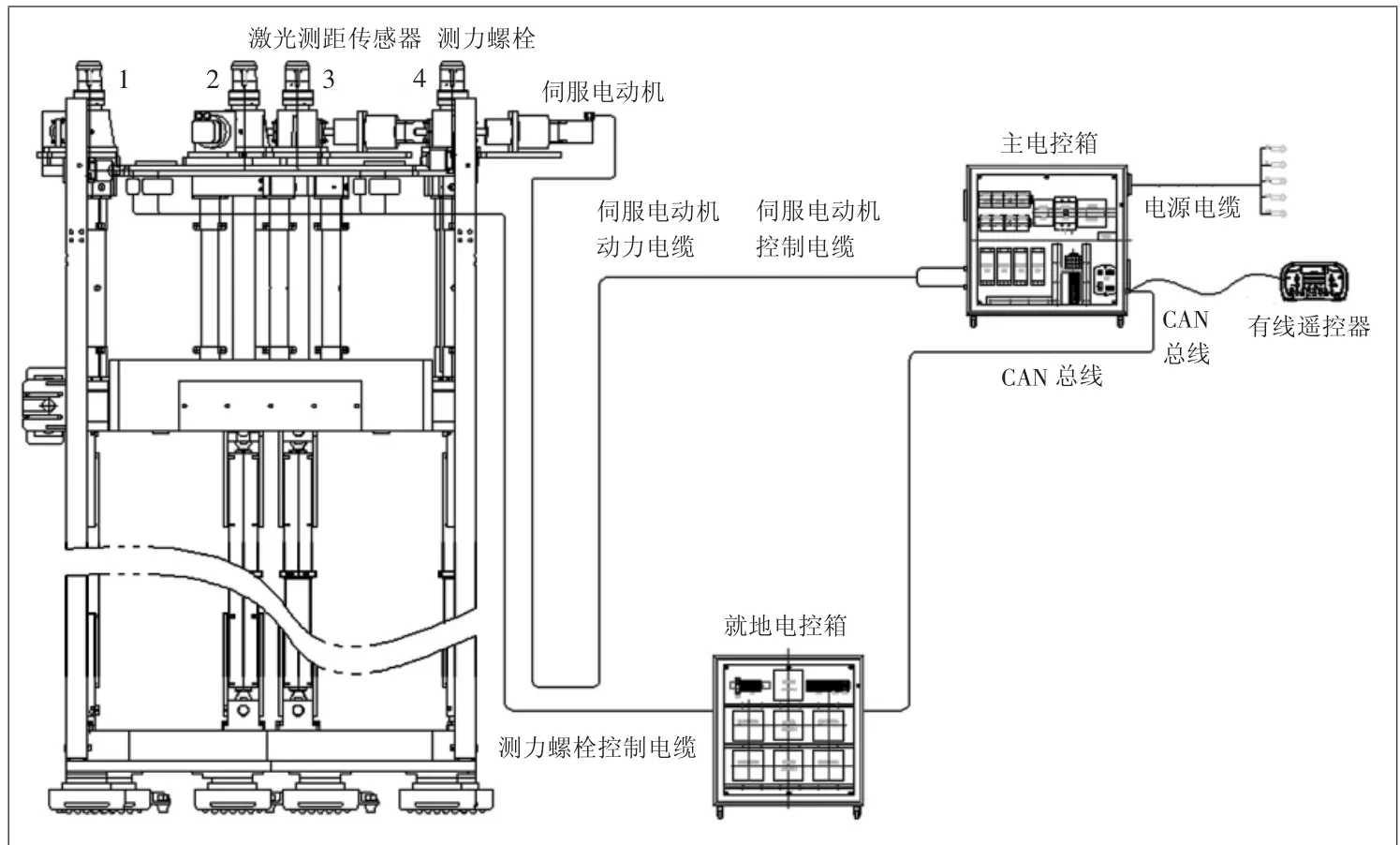
圖2 屏蔽主泵安裝小車頂升機(jī)構(gòu)電氣控制系統(tǒng)布置圖
1 采用測力螺栓進(jìn)行靜態(tài)載荷與動態(tài)載荷監(jiān)控與保護(hù)
CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)共分為4個獨立的頂升機(jī)構(gòu)單元,每個頂升機(jī)構(gòu)單元配備3個測力螺栓進(jìn)行受力檢測,并將這3個測力螺栓信號就近接入1個信號調(diào)理器中,1個信號調(diào)理器能夠同時處理4路測力螺栓信號調(diào)節(jié)。全系統(tǒng)總共有12個測力螺栓與4個信號調(diào)理器。負(fù)載的質(zhì)量等于12個測力螺栓所測載荷之和。信號調(diào)理器的主要作用是在各測力螺栓不受力的情況下進(jìn)行零位調(diào)節(jié)與調(diào)滿標(biāo)定。另外還配備了I/O模塊將模擬量信號轉(zhuǎn)換為CAN總線信號以提高信號的傳輸距離及穩(wěn)定性與抗干擾能力,測力螺栓測力流程如圖3所示。
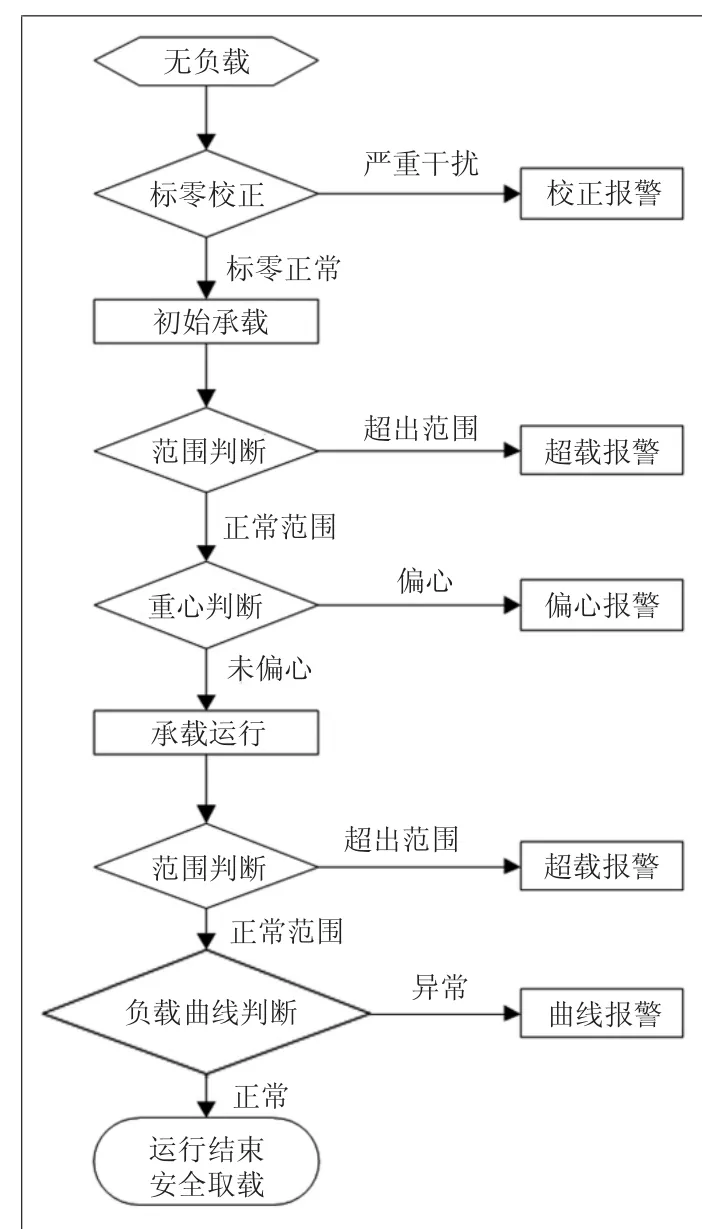
圖3 測力螺栓測力流程圖
在無負(fù)載時能自動檢測與分析測力信號,查看信號是否有擾動與干擾,能夠通過信號調(diào)理器進(jìn)行調(diào)整,實現(xiàn)人工校正或通過控制器內(nèi)部程序計算自動修改標(biāo)定測力螺栓零位偏移值,實現(xiàn)一鍵自動校零,保證測力信號的正確、穩(wěn)定、可靠。即保證Yn=0(n=1,…,12)。當(dāng)擾動值與干擾值出現(xiàn)嚴(yán)重失真時自動屏蔽此信號值參與控制,并在操作界面中進(jìn)行報警指示,提示人員進(jìn)行檢修更換,以實現(xiàn)無負(fù)載情況下的故障自診斷和容錯技術(shù)。
在承受負(fù)載初始狀態(tài)時,控制系統(tǒng)能記住負(fù)載的初始值,并同時比較各測力螺栓的信號,計算分析出負(fù)載的重心點,提示與報警負(fù)載的擺放是否平衡,并警示某一單獨或多個頂升桿是否因負(fù)載不平衡出現(xiàn)承受負(fù)荷超出設(shè)置范圍等情況。實現(xiàn)靜態(tài)承載情況下的故障自診斷和容錯技術(shù)。
在負(fù)載承重起升與下降的運動過程中,控制系統(tǒng)能實時監(jiān)視各測力螺栓的負(fù)載變化曲線,判斷負(fù)載在運行過程中是否穩(wěn)定正常,各頂升動作是否同步,并警示某一單獨或多個頂升桿是否因為運動受阻而出現(xiàn)承受負(fù)荷超出設(shè)置范圍等情況,以實現(xiàn)動態(tài)承載情況下的故障自診斷和容錯技術(shù)。
2 采用伺服驅(qū)動器、伺服電動機(jī)、旋轉(zhuǎn)變壓器進(jìn)行閉環(huán)控制與安全保護(hù)
在CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)控制過程中,動作機(jī)構(gòu)通過伺服驅(qū)動器、伺服電動機(jī)、旋轉(zhuǎn)變壓器一起對速度、位置、轉(zhuǎn)矩值進(jìn)行閉環(huán)控制與保護(hù),此過程是通過旋轉(zhuǎn)變壓器實時對伺服電動機(jī)運行信號以脈沖信號形式進(jìn)行測速與定位,先傳送給伺服驅(qū)動器,再經(jīng)由伺服驅(qū)動器處理后轉(zhuǎn)發(fā)至控制器。伺服驅(qū)動器在收到旋轉(zhuǎn)變壓器的檢測信號的同時,自身同時檢測伺服電動機(jī)的電流及轉(zhuǎn)矩,使伺服驅(qū)動器、伺服電動機(jī)、旋轉(zhuǎn)變壓器之間形成完整的速度、位置、轉(zhuǎn)矩閉環(huán)控制。
在電氣主回路安全保護(hù)中,每個伺服電動機(jī)回路都單獨配置了斷路器,以進(jìn)行短路、缺相、過流保護(hù);并且配置了單獨的接觸器,可以單獨對伺服驅(qū)動器電源進(jìn)行分合控制,在控制系統(tǒng)操作時,如果需要單獨操作某個電動機(jī),可以通過操作面板上的相應(yīng)電動機(jī)使能開關(guān)進(jìn)行電源的分合。伺服驅(qū)動器對于伺服電動機(jī)有精確控制與保護(hù),比如電流、轉(zhuǎn)矩、轉(zhuǎn)速、位置等。并將這些信息參數(shù)通過CAN總線傳輸給控制器進(jìn)行控制,通過手持操作器彩色液晶觸摸顯示屏進(jìn)行顯示。
3 采用激光測距傳感器進(jìn)行位置與速度校驗
CAP1400屏蔽主泵安裝小車每個頂升機(jī)構(gòu)各安裝一個激光測距傳感器。激光測距傳感器具有方向性強(qiáng)、亮度高、單色性好、響應(yīng)速度快、不受環(huán)境溫度影響、定位精度高、重復(fù)性好等特點。其控制流程如圖4所示,在本控制系統(tǒng)中激光測距傳感器主要起到以下作用:1)設(shè)置上下限位與極限。通過激光檢測裝置為每個頂升機(jī)構(gòu)設(shè)置上升限位、上升極限、下降限位與下降極限,防止頂升機(jī)構(gòu)過度上升或下降,防止損壞頂升機(jī)構(gòu)。2)顯示與校驗頂升伸縮長度。通過激光檢測裝置實時顯示各頂升的伸縮長度,并與對應(yīng)的伺服驅(qū)動器之間相互校驗位置信息的準(zhǔn)確性,當(dāng)兩者之間的長度數(shù)據(jù)比較值超出一定范圍時設(shè)備將報警、停機(jī)。3)顯示與校驗頂升速度。通過激光檢測裝置實時對每個頂升機(jī)構(gòu)單位時間內(nèi)的位置變化計算出對應(yīng)頂升機(jī)構(gòu)的伸縮速度,并將此速度與伺服驅(qū)動器的速度值進(jìn)行相互校驗,當(dāng)兩者之間的速度數(shù)據(jù)比較值超出一定范圍時設(shè)備將報警、停機(jī)。4)實現(xiàn)頂升同步。通過激光檢測裝置對各頂升機(jī)構(gòu)之間的位置進(jìn)行實時比較,保證各頂升機(jī)構(gòu)的伸縮同步,當(dāng)各頂升機(jī)構(gòu)之間比較值超出一定范圍時設(shè)備將報警、停機(jī)。
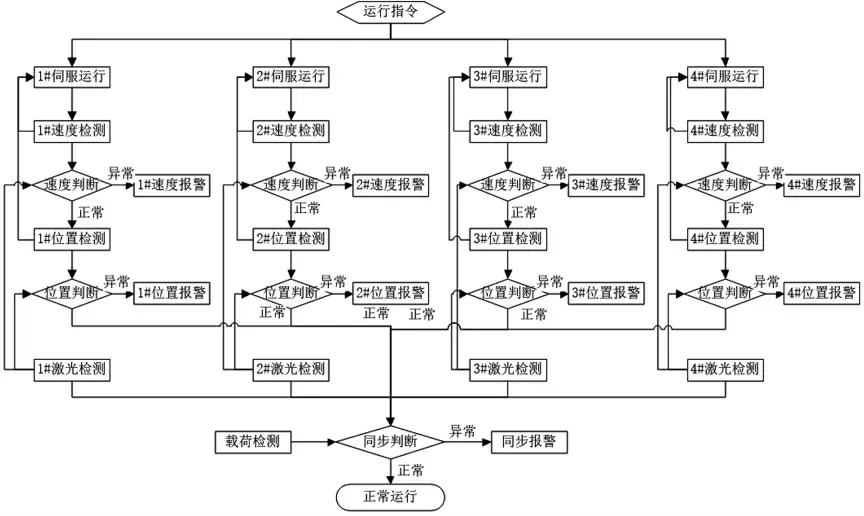
圖4 控制流程圖
當(dāng)激光檢測裝置與伺服位置檢測裝置中出現(xiàn)其中某一種長度位置檢測失效的應(yīng)急情況時。可實現(xiàn)指定另一種正常的位置檢測方式為唯一位置控制方式進(jìn)行位置同步的控制,保證同步操作系統(tǒng)的連續(xù)可靠。
4 采用CAN總線進(jìn)行穩(wěn)定通信
CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)多電動機(jī)同步控制系統(tǒng)采用CAN總線連接控制器、手持操作器及顯示屏、伺服驅(qū)動器、測力螺栓(通過就地I/O模塊采集)、激光測距傳感器(通過就地I/O模塊采集)等。并在設(shè)備主體與控制柜、手持操作器之間采用插件聯(lián)接,實現(xiàn)快速連接與更換。CAN總線的優(yōu)點:1)具有通信速率快、傳輸距離遠(yuǎn)、實時性強(qiáng)、線間干擾小、抗干擾能力強(qiáng)、易實現(xiàn)、成本低、性價比高等優(yōu)點。2)采用雙線串行通信方式,可保證在系統(tǒng)有錯誤時即使多節(jié)點同時向總線發(fā)送數(shù)據(jù),也不會導(dǎo)致總線短路造成數(shù)據(jù)丟失[4]。3)具有優(yōu)先權(quán)和仲裁功能。各節(jié)點根據(jù)總線訪問的優(yōu)先權(quán)采用逐位相互競爭仲裁方式向總線發(fā)送數(shù)據(jù)。CAN協(xié)議摒棄了報文中含源地址與目標(biāo)地址的站地址編碼方式,而是采用標(biāo)識符表示功能信息與優(yōu)先級等的方式對通信數(shù)據(jù)塊進(jìn)行編碼。各節(jié)點依據(jù)報文ID來接收或屏蔽報文,實現(xiàn)不同節(jié)點同時接收同一數(shù)據(jù)或多個CAN控制器連接到同一總線,形成一個多主機(jī)的網(wǎng)絡(luò),實現(xiàn)多主工作方式。4)可靠的錯誤處理和檢錯機(jī)制。檢錯能力強(qiáng),可實現(xiàn)在強(qiáng)噪聲環(huán)境下工作。當(dāng)發(fā)送信息損壞時將自動重發(fā)。當(dāng)某一節(jié)點出現(xiàn)嚴(yán)重錯誤時,該節(jié)點為不影響其他節(jié)點運行將自動關(guān)閉輸出并退出總線,從而保證不會因某一節(jié)點存在錯誤而造成總線處于鎖死或癱瘓狀態(tài)。這些優(yōu)點能夠有效減少控制系統(tǒng)布線數(shù)量,方便控制設(shè)備的安裝與拆卸,實現(xiàn)了控制系統(tǒng)的分散化布置;同時CAN總線有效地增加了控制系統(tǒng)的抗干擾能力,并且通過CAN總線的診斷功能能夠智能判別各站點是否正常運行,有效提升了系統(tǒng)通信的故障自診斷和容錯技術(shù)。
5 采用專用控制器進(jìn)行可靠控制
CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)多電動機(jī)同步控制系統(tǒng)使用工程機(jī)械專用控制器作為控制器。工程機(jī)械專用控制器具有以下特點:溫度范圍寬等級(-40~+70 ℃),可以工作在極端的溫度環(huán)境下;具有較高的防振性與較強(qiáng)的抗沖擊性;高防護(hù)等級(IP67),可直接工作在較臟、潮濕的環(huán)境中;具有較寬的電源輸入范圍,可承受由電瓶、發(fā)電機(jī)供電的電壓波動;能夠抵抗較高的導(dǎo)體和輻射干擾;非常長的工作時間,能夠有效減少停機(jī)時間與維修費用;標(biāo)準(zhǔn)配置CAN接口,能夠方便地通過CAN總線進(jìn)行設(shè)備組網(wǎng);編程語言與環(huán)境符合IEC61131-3國際標(biāo)準(zhǔn);這些特點有效提高了設(shè)備整體的可靠性、穩(wěn)定性、適用性與安全性。選用的就地CAN總線模擬量I/O模塊也具有以上特點。
控制器同時向各蝸桿頂升機(jī)構(gòu)伺服驅(qū)動器發(fā)出方向與速度控制指令,并同時接收伺服驅(qū)動器、激光檢測傳感器、測力螺栓檢測的各蝸桿頂升機(jī)構(gòu)的位置、速度及對應(yīng)測力螺栓的載荷信號,檢測并計算判斷各蝸桿頂升機(jī)構(gòu)是否同步運行。當(dāng)各蝸桿頂升機(jī)構(gòu)出現(xiàn)位置與受力偏差時,將通過調(diào)整相應(yīng)蝸桿的運行速度實現(xiàn)各蝸桿之間的位置、速度及載荷平衡。如果出現(xiàn)各蝸桿之間在一段調(diào)節(jié)時間內(nèi)無法實現(xiàn)平衡或不平衡趨勢更加惡化時,設(shè)備將自動停止運行,并進(jìn)行故障報警,請求人工干預(yù),進(jìn)行檢查確認(rèn)。
6 采用帶彩色液晶觸摸顯示屏的手持操作器進(jìn)行實時監(jiān)控
CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)多電動機(jī)同步控制系統(tǒng)采用帶彩色液晶觸摸顯示屏的手持操作器作為操作與顯示終端,以提高人機(jī)界面的友好性。手持操作器采用高防護(hù)、寬溫域、寬電壓的高可靠型號,其手持操作器布局如圖5所示。
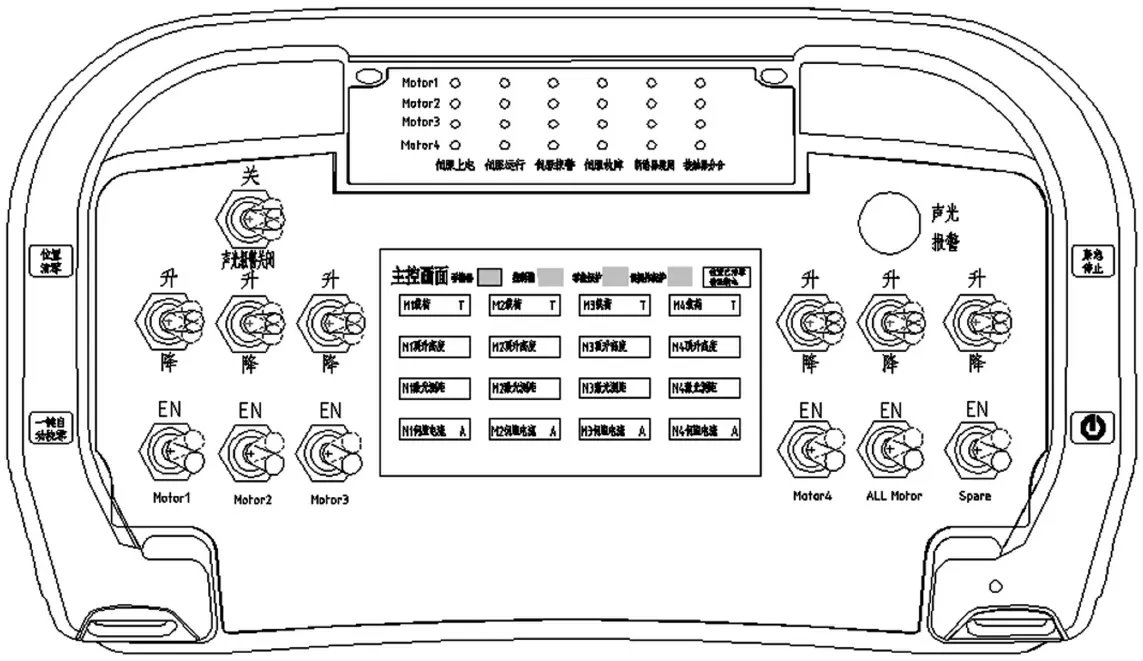
圖5 手持操作器布局圖
液晶顯示屏上能夠?qū)崟r顯示系統(tǒng)中各頂升機(jī)構(gòu)的伸縮位置信息(激光),各頂升機(jī)構(gòu)的伸縮速度信息(激光),各頂升機(jī)構(gòu)的伸縮位置信息(伺服、可標(biāo)零),各伺服電動機(jī)的電流、速度信息,各伺服驅(qū)動器的上電、運行、故障信息,測力螺栓的實時數(shù)據(jù)信息,操作信息、運行信息及異常狀況的報警信息、故障信息等。
對于操作模式,分別設(shè)置了“單獨”操作與“同步”操作模式。在“單獨”操作模式下,手持操作器上分別為每個頂升單元配備了使能按鈕與上下操作按鈕,以方便分別手動調(diào)節(jié)與測試各頂升機(jī)構(gòu)。在“同步”操作模式下,在手持操作器上先選擇需要同步的頂升單元使能按鈕,再選擇同步使能按鈕與同步上下操作按鈕,以實現(xiàn)設(shè)備工藝所需各頂升機(jī)構(gòu)之間的同步運行。要使高差保護(hù)信息作用,必須按下位置標(biāo)零開關(guān)。當(dāng)出現(xiàn)緊急危險情況時,操作人員可以直接按下手持式操作盒上的急停按鈕,通過手持式操作盒、控制器及伺服驅(qū)動器之間的CAN總線通信,各伺服電動機(jī)將立刻停止工作。另外還有遙控器電源開關(guān)、聲光報警關(guān)閉開關(guān)、一鍵自動校零開關(guān)等。
7 采用服務(wù)器進(jìn)行技術(shù)支持與數(shù)據(jù)儲存
CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)多電動機(jī)同步控制系統(tǒng)采用服務(wù)器進(jìn)行技術(shù)支持與數(shù)據(jù)儲存。控制器與服務(wù)器通信內(nèi)容如圖6所示,控制器具備RS232及CAN等通信接口能力,考慮到現(xiàn)場環(huán)境的復(fù)雜性,采用CAN總線作為數(shù)據(jù)通信接口,通過CAN總線通信接口與服務(wù)器建立通信,可實現(xiàn)與服務(wù)器中的專家數(shù)據(jù)庫系統(tǒng)進(jìn)行數(shù)據(jù)交換,能有效地為每臺CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)多電動機(jī)同步控制系統(tǒng)建立完整的實時、歷史數(shù)據(jù)庫信息。在每次負(fù)載運行時,通過與數(shù)據(jù)庫中的歷史數(shù)據(jù)進(jìn)行對比,針對各種平衡與不平衡負(fù)載,能在線建議操作人員采用合理的優(yōu)化運行方案,建議設(shè)備采用合理的運行速度曲線進(jìn)行運行。實時、歷史數(shù)據(jù)庫信息還能將控制器傳輸給服務(wù)器的實時數(shù)據(jù)信息如控制器、伺服驅(qū)動器、I/O模塊、CAN通信接口等各設(shè)備數(shù)據(jù)進(jìn)行實時檢測,通過對比歷史數(shù)據(jù),提前判別各設(shè)備可能出現(xiàn)的故障,防止CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)在使用過程中突然出現(xiàn)設(shè)備安全事故。同時對于各設(shè)備的所有檢測、運行與故障數(shù)據(jù)進(jìn)行實時數(shù)據(jù)歸檔與備份。一臺服務(wù)器可實現(xiàn)同時或分時與多臺CAP1400屏蔽主泵安裝小車設(shè)備進(jìn)行數(shù)據(jù)交換,分別為每臺CAP1400屏蔽主泵安裝小車設(shè)備建立完整的數(shù)據(jù)信息。
8 結(jié)語
針對CAP1400屏蔽主泵安裝小車頂升機(jī)構(gòu)多電動機(jī)同步控制系統(tǒng),本文提出了以工程專用控制器為核心的現(xiàn)場CAN總線控制系統(tǒng),以CAN現(xiàn)場總線實現(xiàn)在控制器、顯示器、伺服、測力螺栓及激光測距傳感器之間的通信。在檢測數(shù)據(jù)上實現(xiàn)了伺服閉環(huán)檢測與激光傳感器檢測相互校驗,測力螺栓載荷檢測與位置、速度、轉(zhuǎn)矩檢測互為補(bǔ)充。這種方法實現(xiàn)同步的特點是:利用了靜態(tài)與動態(tài)載荷的全過程監(jiān)測,數(shù)字伺服的位置精度高、全閉環(huán)控制,激光測距傳感器高檢測精度檢測,CAN總線可靠性高、傳輸時間短、抗干擾能力強(qiáng),工程控制器的高可靠性控制,人機(jī)界面友好顯示,服務(wù)器數(shù)據(jù)功能強(qiáng)大等優(yōu)點。此方案不僅克服了傳統(tǒng)控制方案中各種機(jī)械、電氣元件的缺點與相互之間的干擾,而且還具有系統(tǒng)可靠性高、同步性能好、各伺服單元不互相干擾、控制精度高、維護(hù)方便、操作智能、界面友好等優(yōu)點。

圖6 控制器與服務(wù)器通信內(nèi)容
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
