一種小型彈用發(fā)動機空中起動環(huán)境模擬試驗主動抗擾控制方法
2021-09-24 00:40:44鐘華貴但志宏羅載奇
燃氣渦輪試驗與研究 2021年3期
王 信,鐘華貴,2,但志宏,2,羅載奇,郭 強
(1.中國航發(fā)四川燃氣渦輪研究院,四川綿陽 621000;2.高空模擬技術(shù)重點實驗室,四川綿陽 621000)
1 引言
小型彈用發(fā)動機起動過程具有起動慣性小、起動時間極短(幾秒)、流量變化率大、起動邊界窄等顯著特征,其起動過程對高空模擬試車臺(簡稱高空臺)進、排氣環(huán)境壓力壓差變化極為敏感。一旦進、排氣壓力控制不穩(wěn)定或偏差較大,將會導致起動試驗失敗。因此,高空臺飛行環(huán)境模擬控制方法必須具有較強的抗干擾性和魯棒性,才能較為準確地模擬發(fā)動機起動過程飛行工作環(huán)境的變化。
某小型彈用發(fā)動機空中起動環(huán)境模擬試驗最初采用了常規(guī)PID控制,存在壓力超調(diào)量大、收斂時間長、單組參數(shù)難以適應起動過程壓力快速變化等問題。這是因為常規(guī)PID 控制在控制目標跳變時,存在被控對象易超調(diào)、微分信號易被噪聲污染致使微分控制難以實現(xiàn)等缺陷[1]。為此,又設計了一種前饋+PID反饋的復合控制方法,根據(jù)發(fā)動機起動規(guī)律進行前饋補償,能及時有效地抑制發(fā)動機起動對被控壓力的干擾和動態(tài)影響。但此方法對被試發(fā)動機準確的起動特性或精確數(shù)學模型依賴性較高,控制參數(shù)需根據(jù)被控對象特性和工況改變重新調(diào)整。因此,急需尋找一種能適應不同模擬工況、通用性和快速性較好的強抗擾控制方法以提高模擬品質(zhì)和試驗成功率。
Sastry 設計了一種自適應控制方法,利用系統(tǒng)辨識生成控制系統(tǒng)模型,根據(jù)系統(tǒng)工況的動態(tài)變化自動更新控制參數(shù)。Luppold 開發(fā)了一種基于擾動前饋和PID反饋的控制方法,將風扇轉(zhuǎn)速、發(fā)動機動態(tài)特性等生成增益調(diào)度表進行前饋控制[2]。上述控制方法均對被控對象精確數(shù)學模型依賴性較高,而高空臺難以對每臺被試發(fā)動機進行精確建模,因此其通用性較差,難以推廣。
韓京清[3]于1998年首先提出了自抗擾控制技術(shù)(ADRC),將被控對象轉(zhuǎn)化為積分串聯(lián)型系統(tǒng)構(gòu)造理想控制器,將系統(tǒng)未建模動態(tài)信息和位置擾動作用當作對系統(tǒng)的擾動而自動估計并給與補償。2003年,高志強[4]提出一種自抗擾控制器參數(shù)調(diào)節(jié)方法,將調(diào)參問題簡化為控制器和觀測器帶寬調(diào)參問題,使自抗擾控制方法推廣應用成為可能。孫亮等[5]在交流伺服系統(tǒng)中對其進行了仿真驗證,袁東等[6]驗證了該參數(shù)配置方法的可行性并在武器控制系統(tǒng)中應用。目前,自抗擾控制方法已在船舶動力定位控制[7]、導彈控制[8]、火電廠溫度控制[9]等領域廣泛應用。
本文基于自抗擾控制思想,提出一種用于高空臺非線性不確定復雜系統(tǒng)的主動抗擾控制方法。通過對系統(tǒng)關鍵設備機理建模和設計主動抗擾控制器進行仿真研究,以期為彈用發(fā)動機空中起動試驗新控制技術(shù)發(fā)展奠定理論基礎。
2 飛行環(huán)境模擬系統(tǒng)模型
為避免新控制方法直接在高空臺設備上調(diào)試帶來的不確定風險,通過機理建模方式搭建仿真平臺對主動抗擾控制方法進行仿真分析和驗證。高空臺結(jié)構(gòu)如圖1所示,按功能劃分為PB、PC、PD和PM子系統(tǒng)。PB 子系統(tǒng)位于高空臺進氣管網(wǎng)與供氣總管之間,主要用于保證供氣機組背壓使機組在安全的壓比范圍內(nèi)工作,并為PC子系統(tǒng)提供穩(wěn)定的進口壓力;PC子系統(tǒng)位于PB子系統(tǒng)和發(fā)動機進口之間,主要對不同溫度、壓力的氣體進行摻混調(diào)節(jié)(或直接調(diào)節(jié)),模擬發(fā)動機高空飛行條件下的進氣總壓和總溫實時變化;PD子系統(tǒng)位于發(fā)動機出口至排氣調(diào)節(jié)閥X3 和X4 之間,主要通過對高空艙壓力進行實時調(diào)節(jié),保證飛行高度模擬的準確性。PM 子系統(tǒng)位于PD子系統(tǒng)和抽氣機組之間,用于將發(fā)動機排出的低壓燃氣增壓后排出至大氣環(huán)境。
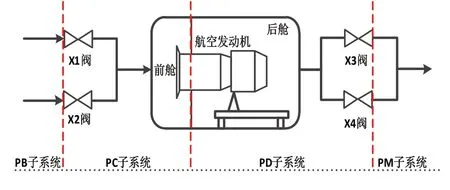
圖1 高空臺結(jié)構(gòu)示意圖Fig.1 Layout diagram of high altitude test facility
首先建立高空臺關鍵設備模型,搭建仿真平臺。仿真平臺涉及的模型主要包括PC 子系統(tǒng)管網(wǎng)容腔模型、PD 子系統(tǒng)管網(wǎng)容腔模型、液壓伺服執(zhí)行機構(gòu)模型和調(diào)節(jié)閥流量特性模型。
2.1 PC子系統(tǒng)管網(wǎng)容腔模型
PC子系統(tǒng)管網(wǎng)容腔主要由X1柱塞閥、X2蝶閥、試驗艙前室結(jié)構(gòu)、空氣管道及流量管等組成。為簡化分析,將其合理等效為一個容腔結(jié)構(gòu),如圖2 所示。圖中,X1 閥和X2 閥為進氣調(diào)節(jié)閥,控制PC 子系統(tǒng)管網(wǎng)容腔壓力;PC子系統(tǒng)管網(wǎng)容腔出口為發(fā)動機進口。

圖2 PC子系統(tǒng)管網(wǎng)容腔結(jié)構(gòu)簡圖Fig.2 Diagram of PC subsystem pipe network cavity
建立的PC 子系統(tǒng)管網(wǎng)容腔溫度和壓力的微分方程分別為:
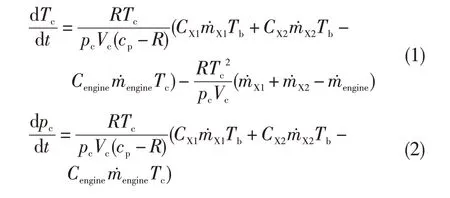
式中:Tc為PC 子系統(tǒng)管網(wǎng)容腔溫度,pc為PC 子系統(tǒng)管網(wǎng)容腔壓力,Vc為PC 子系統(tǒng)管網(wǎng)容腔容積,為X1 閥流量,為X2 閥流量為PC 子系統(tǒng)排氣流量,cp為氣體的比定壓熱容,R為氣體常數(shù),CX1為X1閥進氣氣流速度,CX2為X2閥進氣氣流速度,Cengine為PC 子系統(tǒng)管網(wǎng)容腔排氣氣流速度,Tb為PB 子系統(tǒng)出口氣流溫度。
2.2 PD子系統(tǒng)管網(wǎng)容腔模型
PD 子系統(tǒng)管網(wǎng)容腔主要由發(fā)動機出口、X3 蝶閥、X4 蝶閥、試驗艙及空氣管道等組成。為簡化分析,將其合理等效為一個容腔結(jié)構(gòu),如圖3所示。圖中,X3 閥和X4 閥為排氣調(diào)節(jié)閥,PD 子系統(tǒng)管網(wǎng)容腔進口為發(fā)動機出口,其壓力由X3閥和X4閥控制。
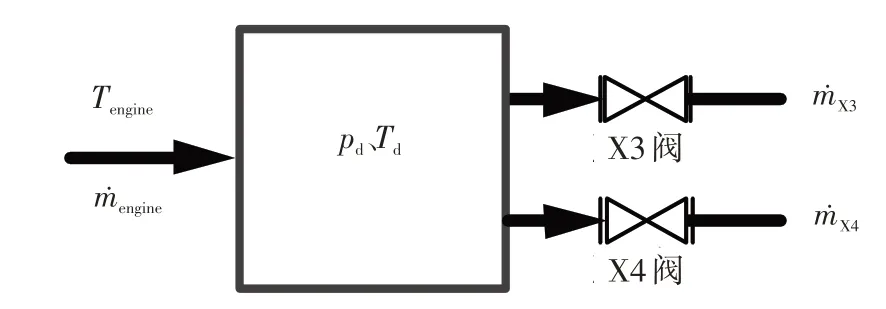
圖3 PD子系統(tǒng)管網(wǎng)容腔結(jié)構(gòu)簡圖Fig.3 Diagram of PD subsystem pipe network
建立的PD 子系統(tǒng)管網(wǎng)容腔溫度和壓力的微分方程分別為:
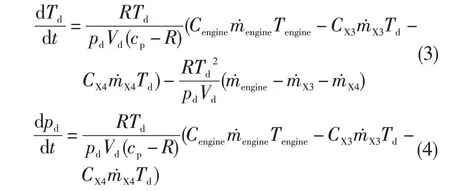
式中:Tengine為發(fā)動機排氣溫度,pd為PD 子系統(tǒng)管網(wǎng)容腔壓力,Vd為PD子系統(tǒng)管網(wǎng)容腔容積為X3閥流量,為X4閥流量,CX3為X3閥排氣氣流速度,CX4為X4閥排氣氣流速度。
2.3 液壓伺服執(zhí)行機構(gòu)模型
液壓伺服系統(tǒng)執(zhí)行機構(gòu)主要由電液伺服閥、液壓缸、位移傳感器等組成,液壓伺服系統(tǒng)采用的控制器為比例控制器。建立的液壓執(zhí)行機構(gòu)模型為:
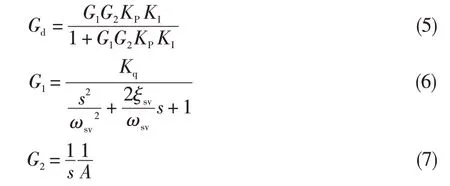
式中:G1為電液伺服閥電信號到電液伺服閥流量的傳遞函數(shù),G2為電液伺服閥流量到液壓缸活塞位移的傳遞函數(shù),KP為比例系數(shù),KI為積分系數(shù),Kq為流量增益,s為微分算子,ωsv為電液伺服閥的固有頻率,ξsv為電液伺服閥的阻尼比,A為液壓缸截面積。
2.4 調(diào)節(jié)閥流量特性模型
PC子系統(tǒng)和PD子系統(tǒng)均使用液壓驅(qū)動的一大一小兩臺調(diào)節(jié)閥對進氣壓力或排氣壓力進行組合調(diào)節(jié)。調(diào)節(jié)閥流量特性模型采用文獻[10]提出的流量計算方法建模,其質(zhì)量流量計算公式為:

式中:φ為調(diào)節(jié)閥的流量系數(shù),表征調(diào)節(jié)閥的流量特性;S為調(diào)節(jié)閥的流通截面積;T1、p1分別為調(diào)節(jié)閥前氣流的溫度和壓力。由于T1、p1在試驗中測得,S可以通過閥門開度計算得出,所以只需知道φ即可獲得通過閥門的流量。
3 主動抗擾控制器設計
3.1 二階系統(tǒng)狀態(tài)空間
高空臺飛行環(huán)境模擬系統(tǒng)的PC子系統(tǒng)和PD子系統(tǒng)模型均由液壓伺服執(zhí)行機構(gòu)(伺服閥和液壓缸等)、閥門、系統(tǒng)壓力變化模型等組成。為簡化研究,可將液壓伺服執(zhí)行機構(gòu)簡化為一階慣性環(huán)節(jié),將系統(tǒng)壓力變化模型簡化為積分環(huán)節(jié),簡化方法詳見文獻[11]。經(jīng)過合理簡化,PC子系統(tǒng)和PD子系統(tǒng)均可轉(zhuǎn)化為典型的二階系統(tǒng)。
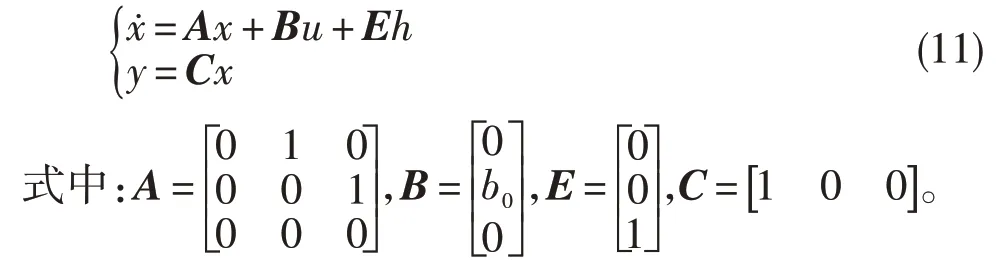
建立二階系統(tǒng)狀態(tài)空間。以PC子系統(tǒng)為例:

將其寫成:

式中:y、u分別為控制系統(tǒng)的輸出和輸入信號,w為外部擾動,f(y,,w,t)為系統(tǒng)總擾動。
該二階系統(tǒng)狀態(tài)空間為:
3.2 主動抗擾控制器原理
針對小型發(fā)動機起動試驗設計的主動抗擾控制器的原理如圖4所示。主動抗擾控制器主要由跟蹤微分器、PD 控制器、擴張狀態(tài)觀測器等組成。跟蹤微分器是小型發(fā)動機空中起動試驗主動抗擾控制器的重要部分,主要用來獲取光滑的輸入信號,并安排過渡過程,解決響應速度與超調(diào)之間的矛盾,提高系統(tǒng)的穩(wěn)定性。擴張狀態(tài)觀測器為自抗擾控制器的核心部分,將系統(tǒng)內(nèi)部擾動和外部擾動及建模不確定性擴張為新的狀態(tài)變量,實時觀測該狀態(tài)變量并實時補償,將系統(tǒng)轉(zhuǎn)化為一個積分串聯(lián)型系統(tǒng),提升控制系統(tǒng)的魯棒性。PD 控制器為主動抗擾控制器的內(nèi)核。
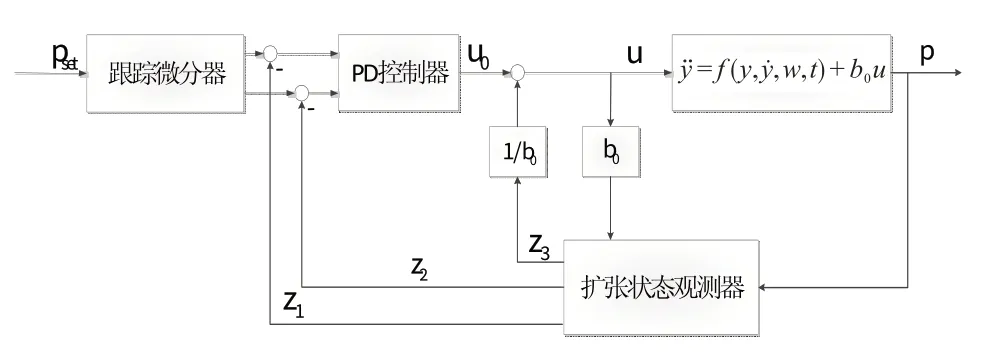
圖4 主動抗擾控制器原理框圖Fig.4 Principle block diagram of active disturbance rejection controller
3.3 擴張狀態(tài)觀測器設計
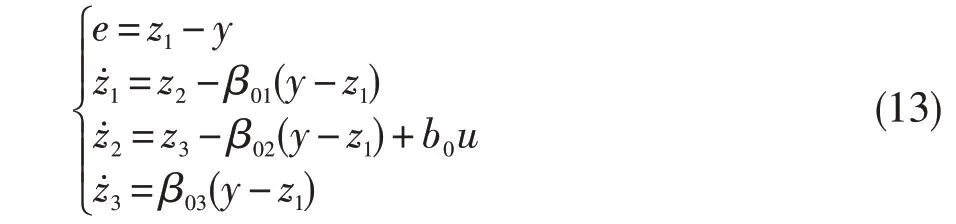
針對高空臺飛行環(huán)境模擬系統(tǒng)被控對象,設計擴張狀態(tài)觀測器,如公式(12)所示:
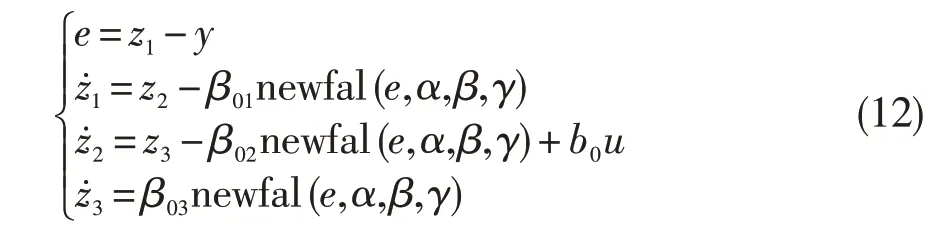
式中:z1跟蹤x1(被控量),z2跟蹤x2(被控量的微分),z3跟蹤x3(被控對象的總擾動,包括內(nèi)擾和外擾)。
用(y-z1)代替非線性函數(shù)newfal(e,α,δ,γ)分析,可得式(12)的線性化方程:
設系統(tǒng)帶寬為ω0,將擴張狀態(tài)觀測器特征方程的3個極點都配置在-ω0處,可簡化擴張狀態(tài)觀測器的參數(shù)調(diào)整過程。β01、β02、β03可寫成與ω0的關系,即β01=3ω0,β02=3ω02,β03=ω03。則觀測器特征方程可化為:

擴張狀態(tài)觀測器包括非線性和線性兩種。由于高空臺飛行環(huán)境模擬系統(tǒng)是由調(diào)節(jié)閥、液壓缸、管網(wǎng)容腔等組成的一個非線性系統(tǒng),為了對其內(nèi)部擾動和外部擾動及建模不確定性等進行較為準確的觀測,故需進行非線性擴張狀態(tài)觀測器設計。在設計非線性擴張觀測器時,最早選用了非線性函數(shù)fal(e,α,β):

fal(e,α,β)的響應曲線雖然連續(xù),但在線性區(qū)間δ較小時會產(chǎn)生高頻顫振,導致系統(tǒng)性能較差。為此,采用劉丙友[12]提到的改造方法進行改進:
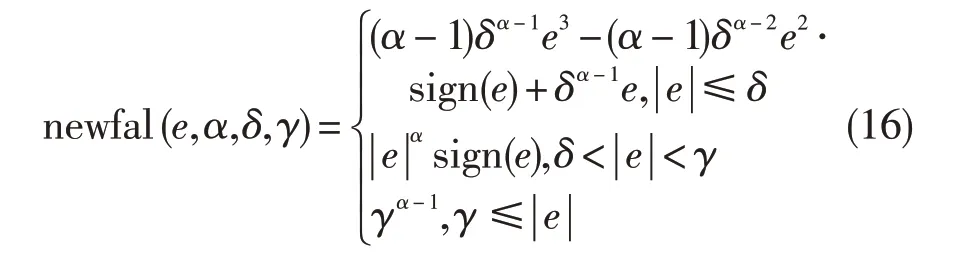
從上式看出,在e足夠小的鄰域內(nèi),newfal(e,α,δ,γ)近似為奇函數(shù);當|e|足夠大時,newfal(e,α,δ,γ)的值近似飽和,α=1.0 時newfal(e,α,δ,γ)的值是e;當γ≤|e|時,newfal(e,α,δ,γ)變?yōu)榫€性函數(shù)。圖5 給出了newfal(e,α,δ,γ)的響應曲線。
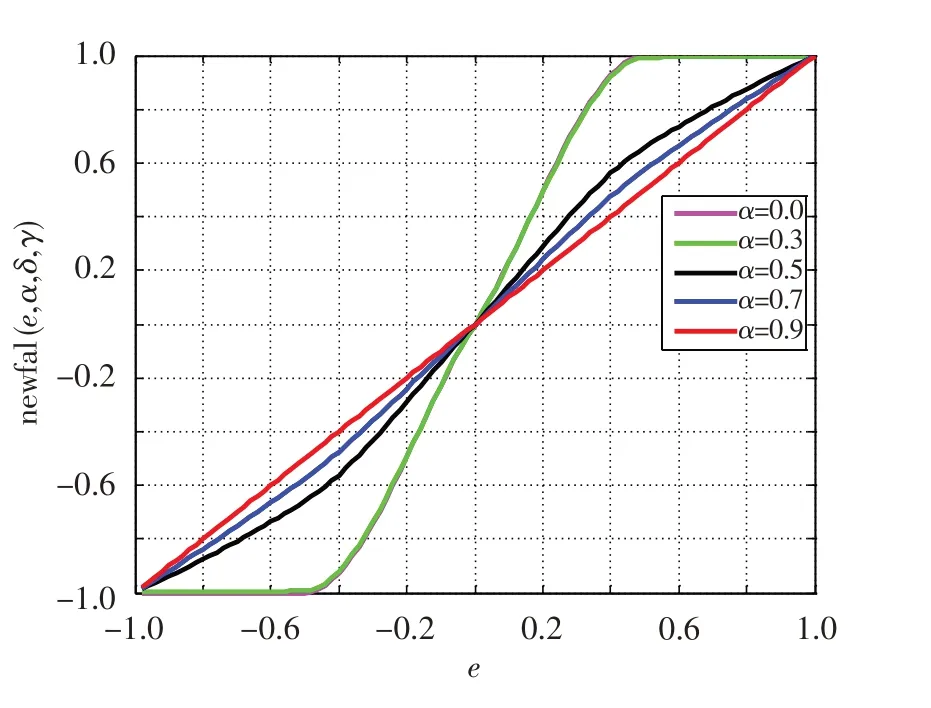
圖5 newfal(e,α,δ,γ)的響應曲線Fig.5 Response curve of newfal(e,α,δ,γ)
為對比分析fal(e,α,β)和newfal(e,α,δ,γ)的性能(尤其是原點附近),設置α=0.03、δ=0.05,仿真結(jié)果見圖6。可見,相比于fal(e,α,β),newfal(e,α,δ,γ)在原點附近更光滑,線性度更好,依此設計的自抗擾控制器具有更快的響應速度和更小的超調(diào)量。故本文在設計主動抗擾控制器時,采用newfal(e,α,δ,γ)對擴張狀態(tài)觀測器進行改進。
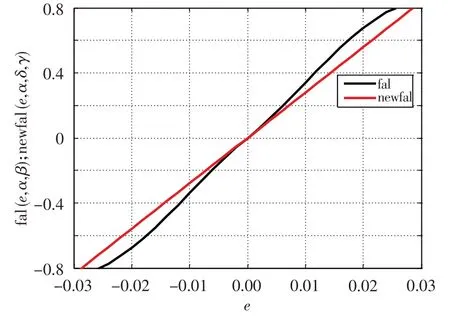
圖6 fal(e,α,β)和newfal(e,α,δ,γ)仿真結(jié)果對比Fig.6 Simulation results comparison of fal(e,α,β)and newfal(e,α,δ,γ)
3.4 PD控制器
設計控制律為:

針對改造后的積分串聯(lián)系統(tǒng),設計合適的PD控制器:

式中:r是設定值,KP為比例系數(shù),KD為微分系數(shù)。
為簡化參數(shù)整定過程,將積分串聯(lián)系統(tǒng)的極點配置在-ωc處,即

式中:KP=ωc2,KD=2ωc。
與進氣系統(tǒng)相似,排氣系統(tǒng)可采用相同原理進行主動抗擾控制器設計。
4 仿真驗證
針對小型發(fā)動機起動環(huán)境模擬試驗,設計的主動抗擾控制器主要解決該發(fā)動機起動過程中進氣、排氣壓力難于精確控制的問題。分別采用常規(guī)PID控制器和主動抗擾控制器進行主動抗擾測試仿真試驗:仿真初始時刻(即發(fā)動機起動前),PC子系統(tǒng)壓力和PD 子系統(tǒng)壓力均為a kPa(為某高度對應大氣壓力);14 s時,PC子系統(tǒng)壓力迅速升高2.0 kPa,建立發(fā)動機空中起動條件,發(fā)動機開始點火起動至慢車狀態(tài)。
圖7示出了采用常規(guī)PID控制的進、排氣壓力控制效果。可見,發(fā)動機起動過程中,PC 子系統(tǒng)壓力最大偏差≯0.60 kPa,PD 子系統(tǒng)壓力最大偏差≯0.30 kPa;PC子系統(tǒng)壓力9 s恢復至穩(wěn)定狀態(tài),PD子系統(tǒng)壓力約20 s恢復至穩(wěn)定狀態(tài),收斂時間較長,動態(tài)跟蹤能力差。圖8給出了主動抗擾控制器下的進、排氣壓力控制效果。可見,發(fā)動機起動過程中,PC子系統(tǒng)壓力在動態(tài)調(diào)整過程中最大偏差≯0.30 kPa,進入穩(wěn)態(tài)時間較短且無超調(diào);PD子系統(tǒng)壓力最大偏差≯0.15 kPa,進入穩(wěn)態(tài)時間短。據(jù)此表明:基于ADRC的主動抗擾控制器能大幅改善控制系統(tǒng)的動態(tài)跟蹤能力和穩(wěn)態(tài)控制效果,收斂時間短,控制效果優(yōu)于常規(guī)PID控制方法。
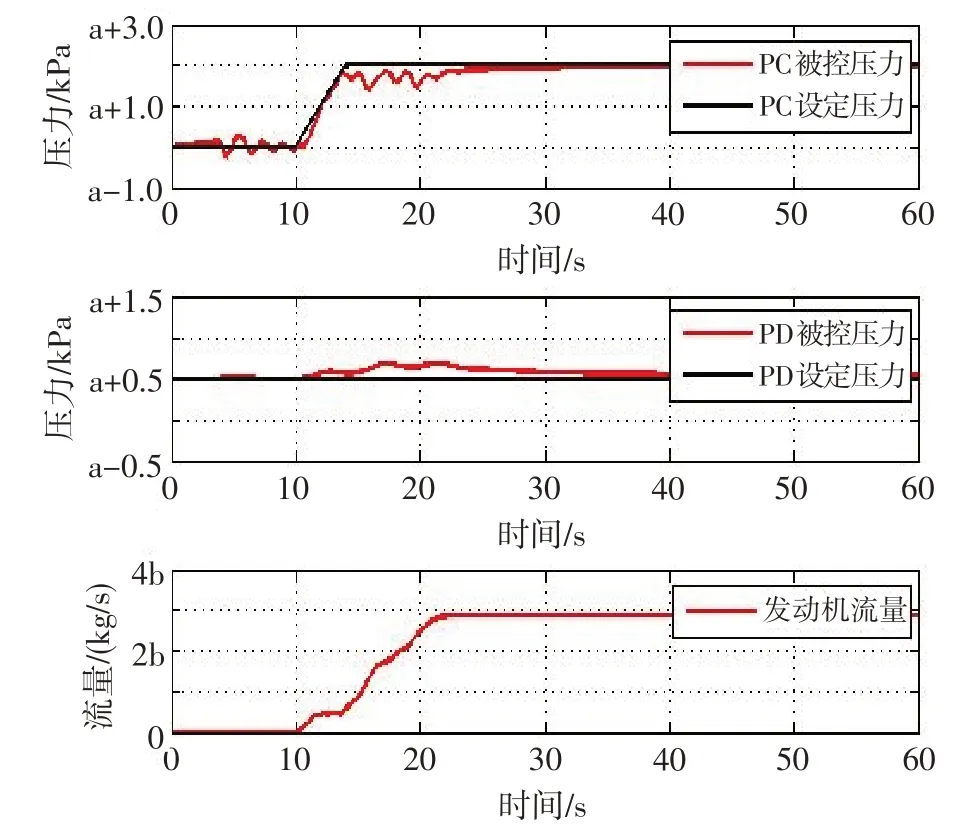
圖7 常規(guī)PID控制仿真效果Fig.7 Simulation results of conventional PID control
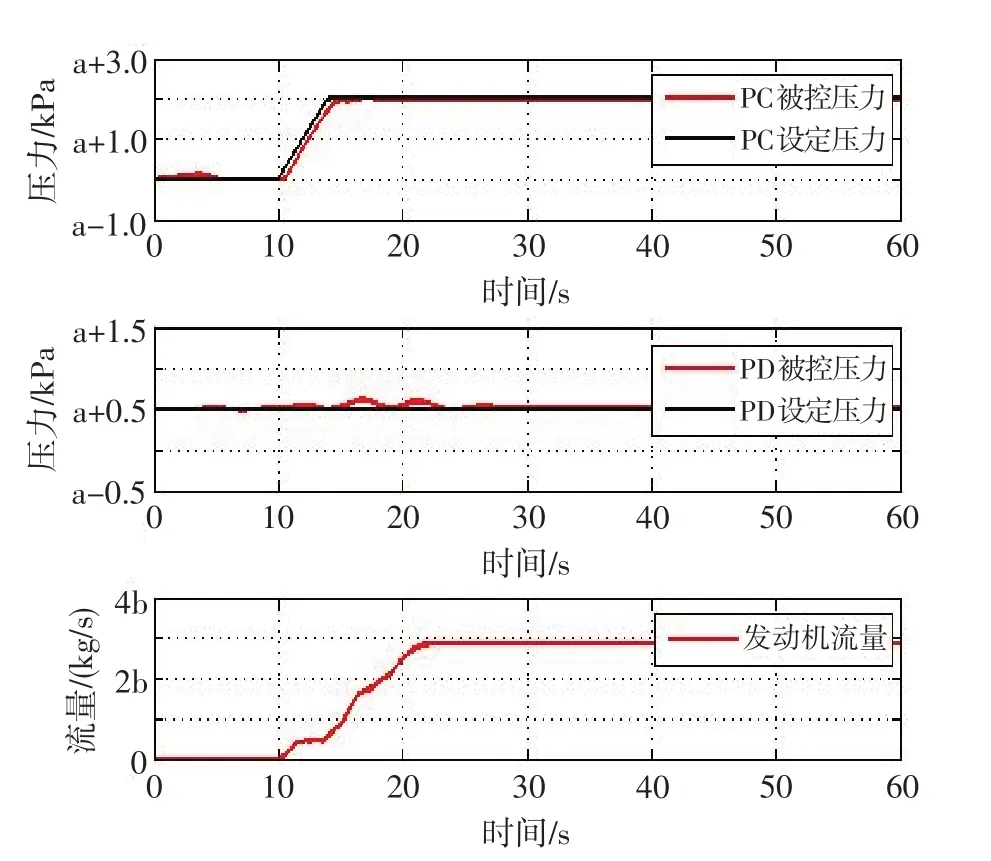
圖8 主動抗擾控制仿真效果Fig.8 Simulation results of active disturbance rejection
5 結(jié)論
提出的基于自抗擾控制思想的主動抗擾控制方法,在彈用發(fā)動機空中起動環(huán)境模擬試驗中實現(xiàn)了進、排氣環(huán)境壓力模擬的快速響應和精確控制,且進、排氣控制偏差滿足技術(shù)指標要求,控制效果優(yōu)于常規(guī)PID 控制,是一種適合高空臺非線性不確定復雜系統(tǒng)的控制方法,具有重要的工程應用價值。
猜你喜歡
儀器儀表用戶(2022年11期)2022-11-03 12:38:58
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年5期)2022-05-06 09:02:30
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
石油化工自動化(2018年5期)2018-11-14 02:34:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
