基于光纖干涉原理的轉機監測振動傳感器設計
2021-09-22 04:11:04劉宗麟宋繼紅劉會杰衣文索李東旭
吉林大學學報(理學版) 2021年5期
劉宗麟, 宋繼紅, 劉會杰, 衣文索, 李東旭
(1. 長春大學 電子信息工程學院, 長春 130022; 2. 長春理工大學 光電工程學院, 長春 130022)
大型轉機是電力電源、 輸水水泵、 飛機發動機和電力系統中的重要設備, 其穩定運行對于確保電力生產安全至關重要[1-2]. 一個機械系統由轉體自身、 轉機外殼和外部負載構成, 其內部結構復雜且不對稱. 在整個轉機內部系統中存在多種振動, 包括系統外振源傳遞的強迫振動及系統自身產生的自由振動. 由于振動會產生大量噪聲, 導致其機械結構逐漸損壞, 最終損壞轉機. 因此, 對轉機振動產生的原因進行分析研究并達到實時監測已引起人們廣泛關注[3]. 通過對轉子振動信息的分析, 可獲得轉機的運行狀態. 大多數傳統的電加速度傳感器均可監測轉機的振動狀態, 但其靈敏度較低, 抗電磁干擾能力較差, 且需外部對其供電, 使其應用范圍較小.
目前, 對大型轉機振動監測主要有數字信號處理器(DSP)、 半在線振動監測系統、 虛擬儀器與網絡技術結合、 云計算技術、 全光纖自混合光纖干涉測振技術、 Peakvue技術等方法. 在轉機振動監測系統中, 以DSP芯片為核心, 將鎖相環和外部晶振等模塊整合, 使其成為一套完整的檢測系統, 并對外部接口電路進行拓展, 組成了結構更復雜、 功能更完善、 對轉機振動監測更準確的系統[4]. 半在線振動監測系統可對轉機運行狀態和故障位置等進行定向監測, 但無法采集轉機在故障狀態下的運行情況[5]. 在虛擬儀器與網絡技術結合中, 利用NI數據采集卡、 速度傳感器以及振動傳感器進行轉機振動數據采集, 通過Butterworth濾波器、 小波分析、 快速Fourier變換和功率譜分析對數據進行處理, 將得到的波形與實驗結果進行比對, 從而完成對轉機振動的監測[6]. 云計算具有靈活性高、 可拓展性強、 應用形態靈活等特點, 將其在便攜式轉機振動監測儀的振動量處理單元中引入服務器, 通過硬件與軟件相結合的方法, 將振動檢測模塊與數據處理模塊分離, 從而減輕了監測儀對數據處理的負擔. 但僅實現了Fourier變換的頻譜分析, 未加入更多的頻譜分析技術[7]. 在全光纖自混合干涉測振技術中, 通過研究轉機的電磁故障和機械故障, 設計了全光纖自混合干涉傳感器, 提出了可實現目標結構在非保偏環境下高精確度、 高靈敏度、 高精密度重構的基于正交信號分解時域解調技術, 但由于光的傳播和散射與電光晶體主軸存在一定角度, 導致信號強度偏振減弱, 因此使帶有轉機振動的信號產生失真現象[8]. Peakvue技術可離線對轉機振動數據進行監測, 通過分析振動波形的時域圖和頻譜圖, 可準確找到轉機設備的故障點, 但實時性較差[9].
基于此, 本文采用無源器件的光纖傳感器, 該傳感器具有不受電磁干擾、 靈敏度較高、 結果精確和實時性強等優點, 在傳感振動、 自然災害預警監測和大氣探測等領域應用廣泛[10]. 用Mach-Zehnder(簡稱M-Z)干涉儀作為實時監測轉機振動的光纖傳感敏感元件, 通過對后端數據的采集和處理進行振動分析, 得到轉機運行的實時狀態, 從而實現對轉機實時監測的目的[11].
1 傳感系統原理
1.1 轉機故障分析
轉機在正常運行時, 其內部的磁極、 轉子和機殼等零件穩定運行, 但轉機磨損或松動后, 其物理振動特性發生變化, 與轉機正常運行時的振幅和振動周期存在顯著差異.
傳統的轉機故障監測方法通過對轉機運行時產生的振動信息進行時域、 頻域或復頻域分析. 轉機在無外界振動干擾時, 振動信號的頻譜主要由基帶信號f0及其各倍次頻帶信號2f0,3f0,4f0等組成.當轉機非正常運轉時, 其頻率特性發生改變, 頻譜的基本頻率和多倍次頻率大小和幅度發生變化.通常基帶信號的頻率f0越大, 轉機的轉速越快, 與基帶信號f0對應的振幅遠大于任何多頻帶信號的振幅[12].
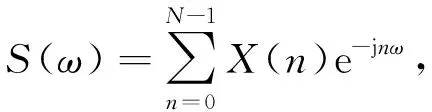
通過離散Fourier變換(DFT)將信號由時域變為頻域進行頻譜分析, 其表達式為
(1)
其中S(ω)為頻率譜密度,X(n)為離散采樣值.
1.2 光纖傳感原理
傳感光纖具有光彈性效應, 當光纖受外界振動和干擾時, 其長度、 帶寬系數、 光功率信號和截止波長等參數發生改變, 導致纖芯內部包含振動信息的透射光的相移發生偏移, 從而影響了光纖的響應特性[13-14].M-Z干涉儀感知外界干擾, 使光在傳輸過程中相位發生變化的原理如圖1所示.由圖1可見, M-Z干涉儀由C1和C2兩個3 dB耦合器連接, 其中L為光纖總長度,n為光纖折射率,D為光纖纖芯直徑.
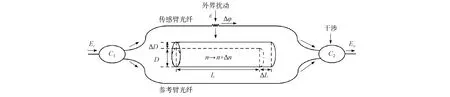
圖1 M-Z干涉儀感知外界干擾的相移原理Fig.1 Phase shift principle of M-Z interferometer sensing external interference
當入射光振幅為Ei, 初始相位差為φ0(φ0為任意角度)時, 傳感光纖在無外界振動時的輸出[15]為
Eo=Ei×cos(ωt+φ0).
(2)
當自然頻率的光在光纖中通過時, 相位
φ=βL,
(3)
其中β為傳播常數,β受光纖纖芯雜質、 光纖材料折射率不均勻和光纖擠壓彎曲等影響.當外界環境振動時, 對于外部環境的振動, 由于光纖傳感器變形, 因此光纖參數發生變化.在外界振動的作用下相移可表示為

(4)
式(4)中等號右邊第一項、 第二項和第三項分別表示由于彈性形變、 Poisson效應和光彈性效應引起的光纖長度、 光纖纖芯直徑和光纖折射率改變導致相位發生變化.當傳感光纖受外界振動作用時, 產生相位差Δφ, 此時傳感光纖輸出為
Eo=Ei×cos(ωt+φ0+Δφ).
(5)
M-Z干涉儀由傳感臂光纖和參考臂光纖兩路組成, 二者共同作為光纖振動傳感器的基本傳感單元, 當無應力應變時, 傳感臂與參考臂兩條路徑中的兩相干光的初始相位差為π/2 . 當外界產生應力應變時, 由于光纖受擠壓和彎折等影響, 光纖內部發生相位變化, 導致傳感臂與參考臂兩路相干光的相位差變為π/2+Δφ(Δφ為任意角度). 改變兩個相干光的相位差可導致兩個相干光的干涉光強度發生變化. 因此, 通過分析干涉光強度的變化, 可確定兩個相干光的初始相位差和相位變化.
2 系統方案設計
2.1 光纖振動傳感系統
光纖振動傳感系統示意圖如圖2所示. 設計以M-Z干涉儀(虛線框所示)為傳感單元, 以1 550 nm激光器為光源, 其發出的光波先通過環形器R1輸入耦合器C1中, 再經C1以各50%的比例分為兩束光, 分別在參考臂光纖和傳感臂光纖中傳輸.
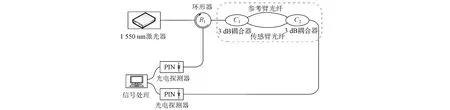
圖2 光纖振動傳感系統示意圖Fig.2 Schematic diagram of optical fiber vibration sensing system
當轉機運行狀態發生變化時, 由于受到感應振動, 傳感臂光纖產生應變, 因此相位發生調制. 當在耦合器C2處兩束光發生干涉時, 轉機振動信息包含于發生干涉信號的相位變化中. PIN光電探測器的作用是對電壓電流信號進行取樣、 整形、 濾波、 放大, 先將受到干涉后的光信號轉化為電信號, 再通過A/D轉換將連續變化的模擬信號轉換為可觀測轉機振動的離散數字信號. 振動信號經處理和優化后, 最終實現了在PC機上對轉機振動的實時監測.
2.2 傳感器結構設計
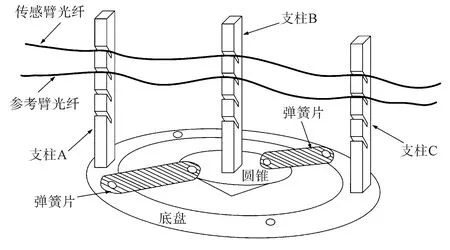
圖3 傳感器結構Fig.3 Sensor structure
為增加傳感器靈敏度及穩定性, 設計傳感器的結構如圖3所示. 在底盤支座上安裝3個支柱, 分別為支柱A、 支柱B、 支柱C, 其中支柱A和支柱C分別固定在底盤的兩邊, 支柱B固定在中間圓錐上, 圓錐通過兩個彈簧片與底盤連接. 當發生振動時, 由于支柱B未與底盤緊密固定, 圓錐與彈簧片構成的穩定狀態易被打破, 因此支柱B的振動幅度遠大于支柱A和支柱C的振動幅度. 當振動非常微弱時, 支柱B也能出現較好的振動, 從而增加了傳感器的靈敏度.
將M-Z干涉儀的傳感臂光纖和參考臂光纖分別固定在三個支柱的凹槽上, 當底盤有輕微振動時, 中間的支柱即可帶動干涉儀產生較大振動, 從而提高了振動靈敏度.
2.3 信號處理電路
為分析光強度信號, 需將光強度信號轉換為電信號, 并通過在相反方向上處理和分析電信號獲得光強度信號. 單路信號處理交換電路原理如圖4所示. 信號處理交換電路主要將模擬信號變換為用于數據采集和控制的數字信號[15]. 經耦合器C2出來的干涉光信號先通過PIN光電探測器轉換為光電流, 再通過跨阻放大轉變為可處理的電壓電流信號, 電壓電流信號經濾波及幅值放大后得到可采集的振動信號.
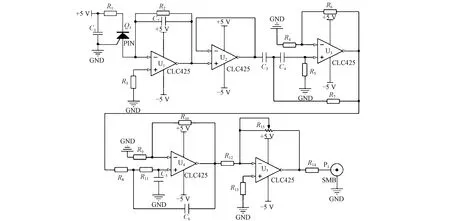
圖4 單路信號處理交換電路示意圖Fig.4 Schematic diagram of signal channel signal processing switching circuit
3 實驗數據分析
用額定功率為2.8 kW、 額定轉速為2 680 r/min的小型轉機進行實驗, 將光纖傳感器固定到待測轉機外殼上, 并與其緊密接觸, 使光纖傳感器可實時感知轉機的振動, 從而達到對轉機振動信息的實時采集, 用解調儀對轉機的振動信息進行解調.
為正確判斷轉機的運行狀態, 先提取和分析轉子正常運行時的振動信息, 以便與轉子故障時的振動信息進行比較. 當轉輪運行時, 將采集的振動信息與正常運行時的振動信息進行比較, 若二者相差較大, 則認為轉輪處于非正常運行狀態.
轉機正常運行時獲得振動信號的時域和頻域如圖5所示, 其中(A)為正常運行時轉機的時域, (B)為正常運行時轉機的頻域. 由圖5(A)可見, 轉機正常運行時振動信號平滑, 振動幅度較小; 由圖5(B)可見, 轉機正常運行時振動頻率約為50 Hz, 在振動頻率2倍(100 Hz)時出現小振幅, 其他頻率基本無振動信號, 轉機穩定運行.

圖5 轉機正常運行時的振動時域(A)和頻域(B)Fig.5 Vibration time domain (A) and frequency domain (B) of rotor during normal operation
轉機負載對轉機運行時的振動狀態影響較大. 當轉機負載減少時, 轉機受較小的轉向阻力, 在不改變其他條件下, 頻率隨轉速的增大而增大, 導致轉機振動幅度減小.
為模擬轉機使用年限久、 外殼結構松弛等故障, 將轉機外殼螺母擰松后進行實驗. 產生的振動時域和頻域如圖6所示, 其中(A)為轉機殼體結構松弛時的振動時域, (B)為轉機殼體結構松弛時的振動頻域. 由圖6(A)可見, 轉機振動幅度較大且不穩定, 轉機殼體有顯著振動; 由圖6(B)可見, 當轉機殼體結構松動導致轉機異常運行時, 振動信號頻譜除基帶信號和每個倍頻帶信號外, 還含有大量的大幅度隨機頻率振動. 因此, 當出現類似圖6(B)所示信號頻譜時, 可判定轉機殼體處于異常狀態.
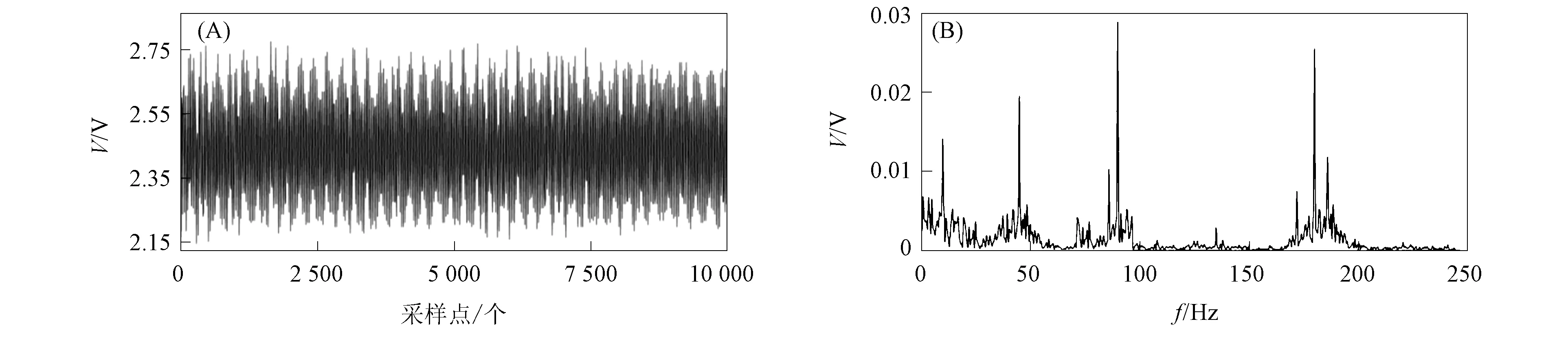
圖6 轉機殼體結構松弛時的振動時域(A)和頻域(B)Fig.6 Vibration time domain (A) and frequency domain (B) when rotor housing structure is relaxed
綜上, 本文利用光纖干涉原理、 分布式光纖傳感技術及信號調理電路等方法, 通過分析轉機振動傳感和故障監測原理, 設計了以M-Z干涉儀為傳感單元的光纖振動傳感器, 用1 550 nm波長激光器作為光源, 先通過環形器、 3 dB耦合器及PIN光電探測器處理, 再采集振動信息并對其進行分析, 最終在輸出端對轉機振動進行實時監測, 經模擬轉機載荷實驗和故障實驗, 分析頻譜可實時監測轉機的運行狀態. 本文設計的傳感器具有靈敏度較高、 實時性強、 結構簡單、 不受電磁干擾等優點, 具有較好的工程應用前景.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00