可變阻力特征對(duì)錐套拖曳位置的影響
2021-09-16 06:01:24張維峰薛長(zhǎng)寶劉學(xué)強(qiáng)
南京航空航天大學(xué)學(xué)報(bào) 2021年4期
徐 陽(yáng),張維峰,薛長(zhǎng)寶,劉學(xué)強(qiáng)
(1.南京航空航天大學(xué)航空學(xué)院,南京 210016;2.中國(guó)航空工業(yè)集團(tuán)有限公司南京機(jī)電液壓工程研究中心,南京 211106;3.中國(guó)航空工業(yè)集團(tuán)有限公司西安飛機(jī)工業(yè)(集團(tuán))有限責(zé)任公司,西安 710089)
空中加油技術(shù)在現(xiàn)階段的航空領(lǐng)域具有重要的戰(zhàn)略價(jià)值,其中軟管?錐套式(簡(jiǎn)稱軟式)空中加油技術(shù)因其設(shè)備結(jié)構(gòu)簡(jiǎn)單、易于拆裝,且對(duì)加油機(jī)要求不高,為世界各國(guó)廣泛采用。加油錐套是軟式加油裝置核心組件之一,安裝在加油軟管末端,能夠增大受油接頭的對(duì)接范圍,其上安裝的穩(wěn)定傘可以提供阻力,使錐套在大氣湍流、加油機(jī)尾渦和受油機(jī)頭波等多重因素影響下保持相對(duì)穩(wěn)定。目前,傳統(tǒng)結(jié)構(gòu)的穩(wěn)定傘分為高速傘和低速傘。給低速飛行器,例如直升機(jī)加油時(shí),加油機(jī)的飛行速度要在67 m/s 左右;給高速飛行器,例如噴氣式飛機(jī)加油則需要180 m/s[1]。這種加油環(huán)境的不匹配要求加油機(jī)在附近的基地降落,在低速和高速加油設(shè)備之間更換,通常消耗至少30 min[2]。定義穩(wěn)定傘的阻力特征為阻力系數(shù)Cd與參考面積S的乘積。由于傳統(tǒng)穩(wěn)定傘阻力特征恒定,加油包線較小,無(wú)法實(shí)現(xiàn)一傘通用,因此業(yè)內(nèi)提出了可變阻力特征穩(wěn)定傘的概念。可變阻力特征穩(wěn)定傘就是通過(guò)一定的控制手段,在飛行速度和高度發(fā)生變化時(shí)調(diào)整穩(wěn)定傘的結(jié)構(gòu),使阻力特征發(fā)生變化,控制錐套位移變化量在較小范圍內(nèi),可以同時(shí)適用于高速和低速加油,極大地?cái)U(kuò)展傳統(tǒng)加油設(shè)備的加油包線。
加油裝置總阻力的75%以上是由穩(wěn)定傘傘衣提供的[3],因此調(diào)整傘衣的迎風(fēng)面積可以有效地改變整體結(jié)構(gòu)的阻力,從而控制加油錐套的下沉量。目前可變阻力特征穩(wěn)定傘有3 種思路[4]:(1)雙層傘衣,需要較大阻力時(shí)打開兩個(gè)傘衣,需要較小阻力時(shí)只打開主傘。(2)變傘撐角,通過(guò)機(jī)構(gòu)控制傘撐角的變化,以此來(lái)控制傘衣的迎風(fēng)面積。(3)彈性結(jié)構(gòu),通過(guò)彈性結(jié)構(gòu)的變形改變穩(wěn)定傘的迎風(fēng)面積,實(shí)現(xiàn)阻力的自適應(yīng)控制。目前多數(shù)設(shè)計(jì)都采用變傘撐角方案,文獻(xiàn)[5?7]對(duì)傳統(tǒng)穩(wěn)定傘加裝了不同的控制機(jī)構(gòu)來(lái)改變傘撐角,從而控制傘衣的迎風(fēng)面積。
加油機(jī)飛行速度和高度發(fā)生變化時(shí)加油錐套阻力特征與拖拽位置的關(guān)系如圖1 所示。為確保對(duì)接過(guò)程中飛機(jī)安全,軟式空中加油一般要求錐套下沉量在1.5~5 m 范圍內(nèi)(圖中藍(lán)色虛線范圍)。當(dāng)來(lái)流速度增大時(shí),錐套整體下沉量減小,曲線向下移;當(dāng)海拔升高時(shí),錐套下沉量增大,曲線向上移。從圖中可以看出阻力特征恒定時(shí)可覆蓋的速度域和高度域都很小,如圖中紅色直線1 所示,阻力特征固定為0.3 時(shí),覆蓋的速度域?yàn)轳R赫數(shù)0.5以上,高度域?yàn)? 000 m 以下;當(dāng)阻力特征從0.3 變化到0.8 時(shí),如直線2 所示,速度域可以拓寬至馬赫數(shù)0.35,高度可以拓寬至10 000 m。阻力特征變化范圍越大,可覆蓋的速度域和高度域范圍就越廣。因此,改變穩(wěn)定傘的阻力特征可以顯著地?cái)U(kuò)展加油包線。

圖1 穩(wěn)定傘阻力特征與下沉量關(guān)系圖Fig.1 Relationship between drag characteristic and paradrogue draught position
1 變阻力特征穩(wěn)定傘模型
目前各國(guó)使用的穩(wěn)定傘結(jié)構(gòu)基本相同,由兩部分構(gòu)成:支架和傘衣。支架由金屬材料制成,起到支撐和傳遞載荷作用。傘衣成錐環(huán)裝,由柔性織物制成,有的傘衣上會(huì)有開孔或縫隙,用來(lái)提高穩(wěn)定性和減小阻力。Kapseong 等[3]通過(guò)全因子實(shí)驗(yàn)分析,給出了支架迎角、穩(wěn)定傘傘面面積以及傘面開孔等因素對(duì)于錐套穩(wěn)定傘整體阻力的影響。支架數(shù)量對(duì)于整體的阻力也有影響,在不加裝傘衣的情況下,支架數(shù)量越多,穩(wěn)定傘阻力越大;加裝傘衣后,增加支架數(shù)量會(huì)導(dǎo)致傘衣的有效面積減小,整體阻力減小[8]。本文采用文獻(xiàn)[6]中的變傘撐角穩(wěn)定傘模型,如圖2 所示。該模型通過(guò)彈簧的收縮來(lái)調(diào)節(jié)傘撐角從而實(shí)現(xiàn)阻力的控制。支架部分變傘撐角原理如圖3 所示:當(dāng)軟管在空中的拖曳形狀與錐套的下沉位置保持穩(wěn)定時(shí),稱這種情況為平衡狀態(tài),平衡狀態(tài)下傘面?zhèn)鬟f給支架的載荷與彈簧變形產(chǎn)生的拉力達(dá)到平衡,穩(wěn)定傘保持結(jié)構(gòu)不變;當(dāng)加油機(jī)速度增大或者來(lái)流空氣密度增大,穩(wěn)定傘表面的氣動(dòng)載荷也增大,平衡狀態(tài)被破壞,傘面?zhèn)鬟f給支架的載荷增大,迫使支架“并攏”,彈簧形變量增大,傘衣減小的迎風(fēng)面積抵消了一部分增大的氣動(dòng)載荷,最終與彈簧產(chǎn)生的拉力相平衡,重新恢復(fù)平衡狀態(tài);反之亦然,當(dāng)外部工況變化導(dǎo)致穩(wěn)定傘產(chǎn)生的載荷減小時(shí),彈簧產(chǎn)生的拉力拉動(dòng)杠桿臂向內(nèi)轉(zhuǎn)動(dòng),支架“張開”,傘撐角變大,傘衣迎風(fēng)面積增大,補(bǔ)償了一部分減小的阻力,當(dāng)氣動(dòng)阻力與彈簧拉力相平衡時(shí),系統(tǒng)恢復(fù)到平衡狀態(tài)。

圖2 穩(wěn)定傘模型Fig.2 Paradrogue model
穩(wěn)定傘傘面形狀的確定采用文獻(xiàn)[9]中的方法,將傘面輪廓離散為微段,在來(lái)流速度V∞下求解離散輪廓運(yùn)動(dòng)方程直至收斂穩(wěn)定。計(jì)算時(shí)將傘衣當(dāng)作不可變形面,簡(jiǎn)化后不同傘撐角的錐套模型如圖4 所示。

圖4 不同傘撐角下穩(wěn)定傘模型Fig.4 Paradrogue model at different struct-arm separation angles
2 軟管數(shù)學(xué)模型
2.1 軟管形狀建模
經(jīng)典的柔性體系統(tǒng)理論中,理想的繩索是一種不抗壓、不抗彎、不抗扭、只受拉的結(jié)構(gòu)元素,加油軟管作為一種類繩索橡膠管,橫截面由內(nèi)襯層、埋線層和外襯層組成[10],當(dāng)加油過(guò)程正常時(shí),軟管的受力模型很大程度與理想繩索相同,但相比柔性繩索加油軟管具有一定的承壓、抗彎和抗扭能力。繩索系統(tǒng)常見的建模方式有兩種,一種是偏微分方程形式的連續(xù)體模型,另一種是常微分形式的有限段離散模型[11]。相比第一種方式,第二種方法更為直觀、便捷,并且可以保證良好的精度。本文使用常微分形式的有限段離散模型對(duì)軟管進(jìn)行建模,采用球棍模型,如圖5 所示,將軟管離散為一段段由光滑球鉸鏈接的剛桿,剛桿質(zhì)量集中在球鉸上。為方便表示,對(duì)軟管和節(jié)點(diǎn)進(jìn)行編號(hào)。將軟管離散為n段,第i段軟管長(zhǎng)度為li,則有n+1 個(gè)節(jié)點(diǎn),與加油吊艙相連的為0 號(hào)節(jié)點(diǎn),第i個(gè)節(jié)點(diǎn)的質(zhì)量為


圖5 軟管-錐套參考系示意圖Fig.5 Reference frames of the hose-drogue system
式中:ρhose表示軟管線密度,mhose表示錐套質(zhì)量。
2.2 節(jié)點(diǎn)受力分析
對(duì)節(jié)點(diǎn)i進(jìn)行受力分析,如圖6 所示。圖中Wi表示節(jié)點(diǎn)i所受重力,Ti表示軟管內(nèi)部張力,Qi表示軟管所受氣動(dòng)力的合力,F(xiàn)i表示軟管微段之間由于彎曲產(chǎn)生的等效恢復(fù)力,則節(jié)點(diǎn)i的合外力Hi可表示為

圖6 節(jié)點(diǎn)i 受力分析Fig.6 Force analysis for node i
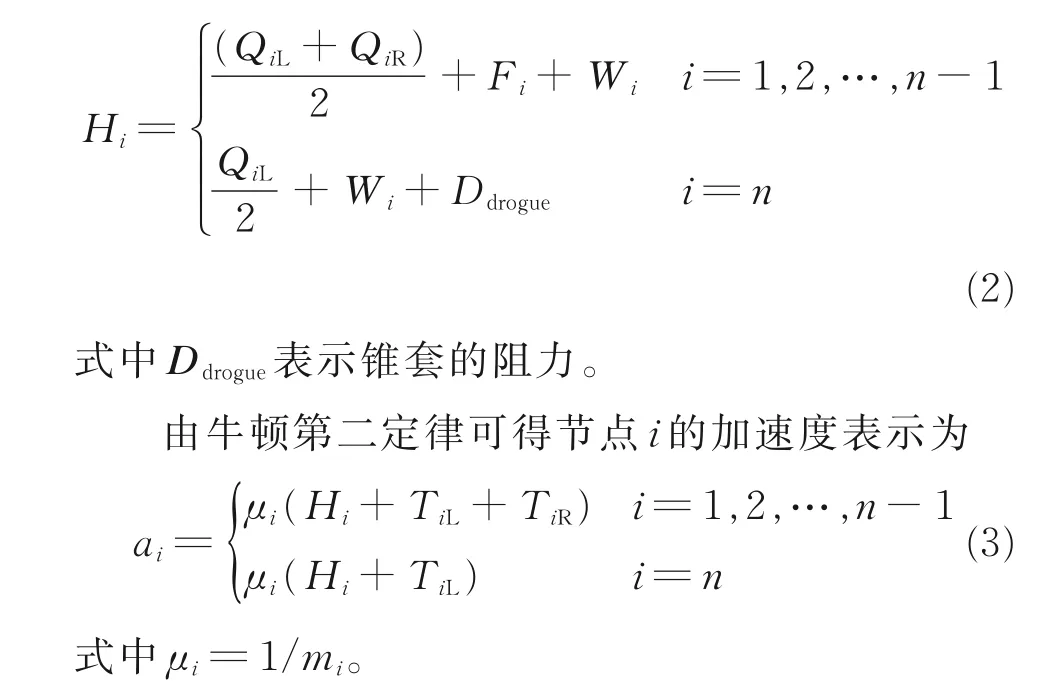
2.3 氣動(dòng)力計(jì)算
不考慮加油機(jī)尾渦和受油機(jī)頭波的影響,軟管在空中穩(wěn)定拖曳時(shí)所受到的氣動(dòng)力主要包括3 部分:軟管末端的錐套?穩(wěn)定傘組件產(chǎn)生的氣動(dòng)阻力、軟管表面受到的空氣摩擦阻力和壓差阻力。軟管微段受到的分布?xì)鈩?dòng)力可以用質(zhì)心處的等效集中力代替,由于離散模型中的軟管質(zhì)量集中在兩端球形鉸鏈上,可進(jìn)一步將質(zhì)心處的集中力用兩端球鉸的等效力,如圖7 所示。下面給出各部分氣動(dòng)阻力的計(jì)算方法。
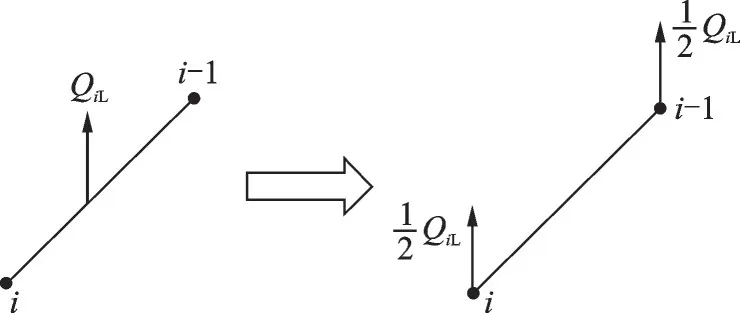
圖7 軟管微段氣動(dòng)力等效示意圖Fig.7 Equivalent figure of aerodynamic of the hose micro segment
2.3.1 錐套?穩(wěn)定傘氣動(dòng)阻力
錐套?穩(wěn)定傘組件產(chǎn)生的氣動(dòng)阻力可通過(guò)如下公式計(jì)算

式中:ρ∞表示來(lái)流密度,V表示當(dāng)?shù)厮俣龋琩drogue表示穩(wěn)定傘完全張開后直徑,Cddrogue表示穩(wěn)定傘的阻力系數(shù),阻力方向與來(lái)流方向相同。
2.3.2 摩擦阻力
考慮空氣的黏性作用,軟管在加油機(jī)尾渦流場(chǎng)中運(yùn)動(dòng)時(shí),周圍氣流的速度梯度會(huì)沿著軟管表面產(chǎn)生分布的切向力,沿軸向積分便形成了軟管所受到的摩擦阻力。圓柱體所受的摩擦阻力因數(shù)是雷諾數(shù)Re的函數(shù),工程上可以通過(guò)Hoerner[12]實(shí)驗(yàn)得出的經(jīng)驗(yàn)公式計(jì)算得出

式中:V表示氣流相對(duì)于軟管微段中心的速度;μ表示空氣的運(yùn)動(dòng)黏性系數(shù),值取1.46×10-5m2/s;L表示軟管微段的特征長(zhǎng)度,定義為

式中:dhose為軟管外徑,α為軟管軸線與相對(duì)速度V的夾角。對(duì)第i節(jié)軟管微段,相對(duì)速度V定義為

式中:Vabs表示氣流相對(duì)地面的速度矢量,Vi-1、Vi分別表示第i-1、i個(gè)節(jié)點(diǎn)的速度矢量。
計(jì)算得出Cf后,軟管微段的摩擦阻力Dskf可通過(guò)下式得到

式中:Vτ表示相對(duì)速度的切向分量,l表示軟管微段的長(zhǎng)度,摩擦阻力的方向與切向速度方向相同。
2.3.3 壓差阻力
由于空氣的黏性作用,氣流流經(jīng)加油軟管時(shí)會(huì)在軟管表面后部發(fā)生流動(dòng)分離,導(dǎo)致在軟管迎風(fēng)面的壓力比背風(fēng)面要高,這種壓力差形成了壓差阻力。與摩擦阻力因數(shù)類似,壓差阻力系數(shù)同樣是雷諾數(shù)Re的函數(shù),計(jì)算方法同樣使用Hoerner 由實(shí)驗(yàn)得到的經(jīng)驗(yàn)公式給出
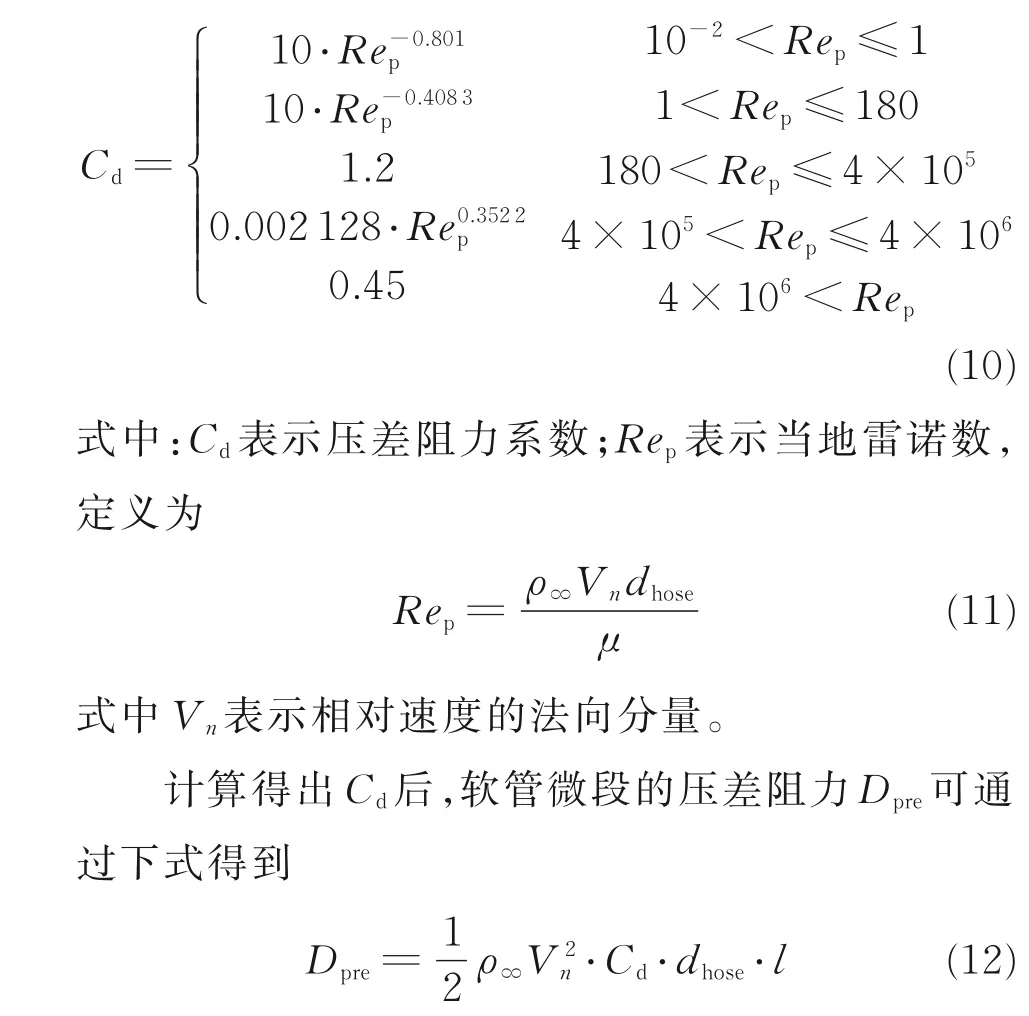
壓差阻力的方向與法向速度方向相同。
2.3.4 軟管恢復(fù)力
軟管在空中拖曳時(shí)會(huì)在氣動(dòng)阻力的作用下發(fā)生彎曲變形,軟管內(nèi)部產(chǎn)生一個(gè)恢復(fù)力矩,令軟管產(chǎn)生抵抗彎曲的趨勢(shì),軟管微段的受力情況可以簡(jiǎn)化為簡(jiǎn)支梁,內(nèi)部的彎曲力矩可以通過(guò)一個(gè)作用在簡(jiǎn)支梁中間的集中載荷來(lái)代替[13?14],用等效恢復(fù)力Fei表示,如圖8 所示。簡(jiǎn)支梁的兩端可以在發(fā)生彎曲時(shí)自由旋轉(zhuǎn),對(duì)于節(jié)點(diǎn)i,等效恢復(fù)力的大小Fei與微段兩端的扭轉(zhuǎn)角θL、θR有關(guān)
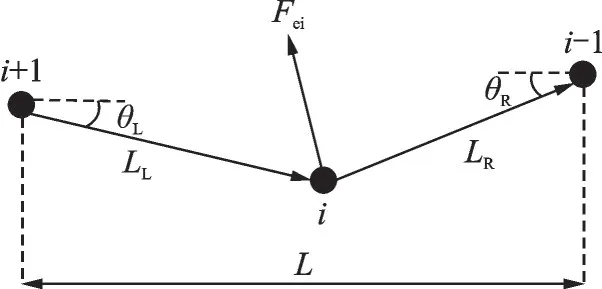
圖8 軟管微段彎曲等效模型Fig.8 Equivalent model of the bending hose micro segment

式中:L表示軟管微段的長(zhǎng)度;E為軟管的彈性模量;I為軟管截面的幾何慣性矩,可通過(guò)式(14)計(jì)算得出
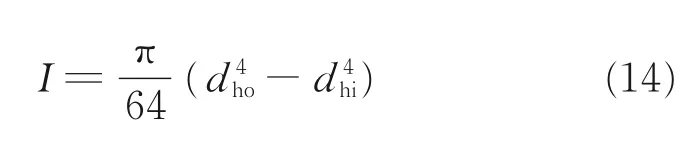
式中:dhi表示軟管內(nèi)徑直徑,dho表示軟管外徑直徑。
等效恢復(fù)力的方向?yàn)?/p>

扭轉(zhuǎn)角θL、θR可通過(guò)式(16)計(jì)算得出。

3 變阻尼過(guò)程仿真模擬
3.1 流場(chǎng)計(jì)算方法驗(yàn)證
為了驗(yàn)證數(shù)值方法的可信度,對(duì)文獻(xiàn)[15]中所使用的穩(wěn)定傘建立三維模型,進(jìn)行氣動(dòng)力數(shù)值模擬,并將數(shù)值模擬的結(jié)果與NASA 飛行試驗(yàn)數(shù)據(jù)進(jìn)行對(duì)比。飛行試驗(yàn)中使用的錐套?穩(wěn)定傘及對(duì)應(yīng)的簡(jiǎn)化三維模型如圖9 所示,數(shù)值模擬與實(shí)驗(yàn)對(duì)比結(jié)果如圖10 所示。結(jié)果表明,所采用的數(shù)值方法得到的阻力值與實(shí)驗(yàn)數(shù)據(jù)吻合較好,佐證了數(shù)值方法的可信度,同時(shí)表明傘面透氣性對(duì)于穩(wěn)定傘整體阻力的影響不大。

圖9 驗(yàn)證用CATIA 模型Fig.9 Paradrogue CATIA model for verificaion

圖10 實(shí)驗(yàn)與仿真數(shù)據(jù)對(duì)比Fig.10 Comparison of operation and simulation data
3.2 數(shù)值仿真設(shè)置
空中加油系統(tǒng)要求設(shè)備能夠在高度為海平面至40 000 英尺(約為12 000 m)范圍,速度在370~550 km/h(約為0.3~0.5 馬赫)范圍內(nèi)正常工作。本文仿真模擬環(huán)境主要在此范圍之內(nèi),計(jì)算域選擇底面半徑為5 000 mm、高為15 000 mm 的圓柱形區(qū)域,選用四面體網(wǎng)格,如圖11 所示。經(jīng)過(guò)網(wǎng)格無(wú)關(guān)性驗(yàn)證后,網(wǎng)格總量超過(guò)300 萬(wàn)個(gè)時(shí)網(wǎng)格數(shù)對(duì)計(jì)算結(jié)果影響很小。在穩(wěn)定傘附近進(jìn)行網(wǎng)格加密,網(wǎng)格總量約400 萬(wàn)個(gè)。
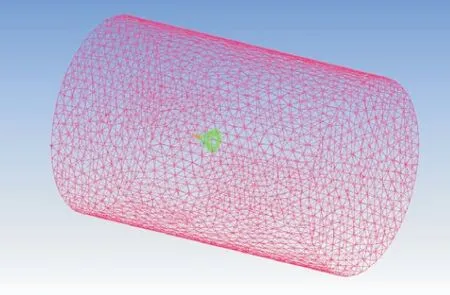
圖11 穩(wěn)定傘流場(chǎng)網(wǎng)格Fig.11 Fluid mesh of paradrogue
3.3 數(shù)值仿真結(jié)果
本節(jié)給出了穩(wěn)定傘氣動(dòng)力數(shù)值模擬的結(jié)果。根據(jù)穩(wěn)定傘的阻力,分析了不同飛行速度和海拔高度下軟管的拖曳形狀。加油機(jī)的迎角為0°,來(lái)流方向如圖5 所示,軟管的各項(xiàng)參數(shù)如表1 所示。
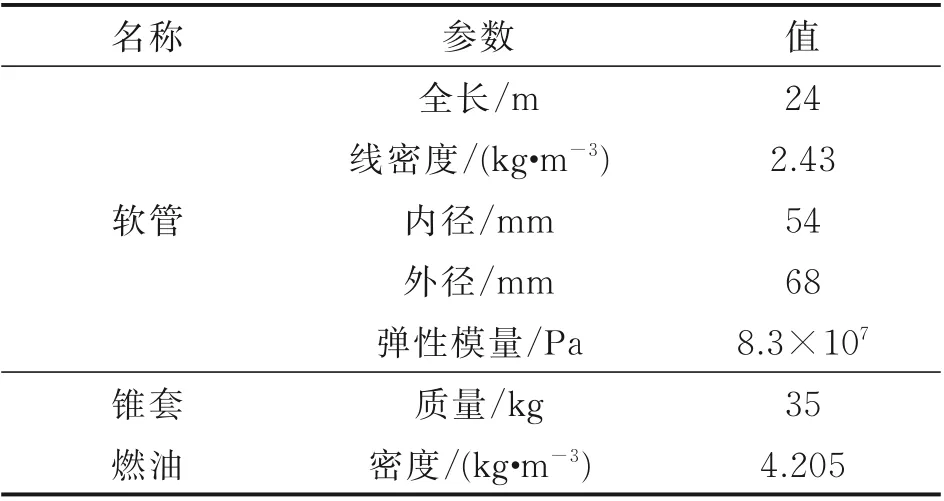
表1 軟管錐套參數(shù)Table 1 Parameters of hose?drogue
3.3.1 變速度氣動(dòng)特性
圖12 和圖13 分別是3 種傘撐角模型阻力特征與阻力隨速度的變化趨勢(shì),從圖12 中可以看出,當(dāng)傘撐角從10°變化到20°的過(guò)程中,穩(wěn)定傘的阻力特征可以從0.4 變化到1.1,變阻尼區(qū)間較大。圖14是加裝了3 種傘撐角模型后軟管的拖拽形狀,從圖中可以看出,傘撐角為10°的模型適用的馬赫數(shù)范圍為0.5~0.6,15°模型適用的馬赫數(shù)范圍為0.4~0.6,20°模型適用的馬赫數(shù)范圍為0.3~0.5,3 種模型適用范圍各不相同,同時(shí)又有重疊區(qū)域,傘撐角從10°變化到20°過(guò)程中可以完整覆蓋馬赫數(shù)0.3~0.6 的速度域。

圖12 阻力特征-速度關(guān)系曲線Fig.12 Relationship between drag characteristic and velocity

圖13 阻力-速度關(guān)系曲線Fig.13 Relationship between drag and velocity

圖14 穩(wěn)定傘拖拽位置Fig.14 Stable draught position of paradrogue
3.3.2 變高度氣動(dòng)特性
圖15 和圖16 分別是3 種傘撐角模型阻力特征與阻力隨高度的變化趨勢(shì),圖17 是加裝了3 種傘撐角穩(wěn)定傘后軟管的拖拽形狀。從圖中可以看出,傘撐角為10°的模型適用范圍為2 000~6 000 m,15°模型適用范圍為2 000~10 000 m,20°模型適用范圍為6 000~10 000 m。僅考慮高度的變化時(shí),10°模型適用于低海拔、高密度區(qū);20°模型適用于高海拔、低密度區(qū);15°模型作為前兩者過(guò)渡模型具有最廣的高度適用范圍。結(jié)果表明,傘撐角從10°變化到20°過(guò)程中可以完整覆蓋2 000~10 000 m 的高度域。

圖15 阻力特征-高度關(guān)系曲線Fig.15 Relationship between drag characteristic and altitude
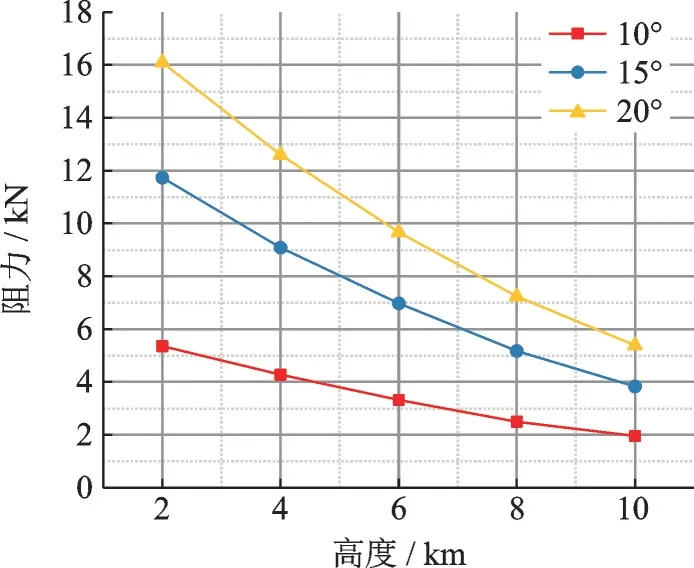
圖16 阻力-高度關(guān)系曲線Fig.16 Relationship between drag and altitude
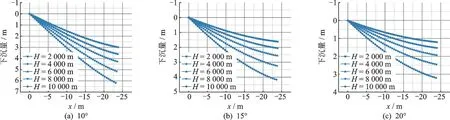
圖17 穩(wěn)定傘拖拽位置Fig.17 Stable draught position of paradrogue
4 結(jié) 論
仿真結(jié)果表明,單一考慮速度或高度的變化,通過(guò)改變穩(wěn)定傘的傘撐角,可以控制阻尼特性的變化,使穩(wěn)定傘能夠覆蓋更寬的速度域和高度域。10°模型由于阻力特征小,相同條件下產(chǎn)生阻力最小,因此可用于高速度、低海拔區(qū)域來(lái)降低產(chǎn)生的阻力值;20°模型阻力特征最大,產(chǎn)生阻力也最大,因此可用于低速度、高海拔等需要較大阻力的情況;15°模型作為前兩者的過(guò)渡模型,可以保證所覆蓋速度域和高度域的連續(xù)性。當(dāng)速度和高度同時(shí)發(fā)生變化時(shí),調(diào)節(jié)傘撐角可以有效控制加油錐套的下沉量,有效拓展了傳統(tǒng)穩(wěn)定傘的加油包線,對(duì)軟式空中加油技術(shù)的應(yīng)用有著顯著的改善。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03