基于模糊邏輯的柔性多狀態(tài)開(kāi)關(guān)協(xié)調(diào)控制策略
2021-09-13 01:41:28李夢(mèng)菲趙榮祥董寧波王朝亮
電力系統(tǒng)自動(dòng)化 2021年17期
李夢(mèng)菲,楊 歡,趙榮祥,董寧波,陸 翌,王朝亮
(1.浙江大學(xué)電氣工程學(xué)院,浙江省杭州市 310027;2.國(guó)網(wǎng)浙江省電力有限公司電力科學(xué)研究院,浙江省杭州市 310014)
0 引言
大規(guī)模分布式能源及以電動(dòng)汽車(chē)為代表的新型負(fù)荷接入將造成配電網(wǎng)潮流復(fù)雜、用戶(hù)需求多樣化的“源-網(wǎng)-荷”一體化形勢(shì)[1-2]。因此,具備主動(dòng)調(diào)控能力的柔性多狀態(tài)開(kāi)關(guān)(flexible multi-state switch,F(xiàn)MS)技術(shù)備受關(guān)注[3]。FMS常采用具有公共直流側(cè)的電壓源型變流器實(shí)現(xiàn)多條配電網(wǎng)饋線(xiàn)互聯(lián)。其中,模塊化多電平換流器(modular multilevel converter,MMC)具有輸出諧波含量少、功率器件耐壓要求低等優(yōu)點(diǎn),相比于其他拓?fù)鋬?yōu)勢(shì)明顯[4],因此,本文以基于MMC的多端口FMS為研究對(duì)象。考慮到新能源的隨機(jī)性與間歇性,負(fù)荷投切、線(xiàn)路故障等復(fù)雜工況都會(huì)威脅FMS的穩(wěn)定運(yùn)行,如何增強(qiáng)多端FMS的抗擾能力是本文的研究重點(diǎn)。
多端FMS的抗擾性能主要體現(xiàn)在以下兩個(gè)方面:一是直流側(cè)電壓應(yīng)被控制在系統(tǒng)允許的運(yùn)行區(qū)間內(nèi);二是控制系統(tǒng)在FMS受擾后應(yīng)能快速恢復(fù)系統(tǒng)功率平衡[5]。相關(guān)領(lǐng)域?qū)W者對(duì)此開(kāi)展了大量研究。文獻(xiàn)[6-7]在主從控制基礎(chǔ)上,利用模型預(yù)測(cè)控制、反饋線(xiàn)性滑模控制實(shí)現(xiàn)FMS基本功能,但其直流電壓僅由單端控制,受擾時(shí)波動(dòng)較大。文獻(xiàn)[8]提出改進(jìn)下垂控制策略,功率分配與直流電壓控制由多個(gè)端口共同承擔(dān),穩(wěn)定較快,但難以實(shí)現(xiàn)無(wú)差調(diào)節(jié)。文獻(xiàn)[9]提出一種復(fù)合控制,通過(guò)滯回比較器在電壓裕度控制與下垂控制之間切換,可加快系統(tǒng)動(dòng)態(tài)響應(yīng)。文獻(xiàn)[10]設(shè)置電壓裕度控制中的備用端按照下垂特性接管直流電壓控制,避免過(guò)沖。類(lèi)似地,文獻(xiàn)[5,11]在下垂控制基礎(chǔ)上,增設(shè)優(yōu)先級(jí)更高的定直流電壓控制端,可有效抑制功率波動(dòng)。
上述文獻(xiàn)提出的復(fù)合控制可將電壓裕度控制與下垂控制的優(yōu)勢(shì)相結(jié)合,但下垂系數(shù)固定,無(wú)法靈活應(yīng)對(duì)復(fù)雜工況,若設(shè)置不當(dāng)將導(dǎo)致系統(tǒng)穩(wěn)定時(shí)間過(guò)長(zhǎng)。文獻(xiàn)[12-14]對(duì)復(fù)合控制進(jìn)行優(yōu)化,實(shí)時(shí)監(jiān)測(cè)直流電壓偏差改變下垂系數(shù),有效加快系統(tǒng)穩(wěn)定。但下垂系數(shù)的取值范圍缺乏理論分析,且下垂系數(shù)計(jì)算過(guò)于復(fù)雜,選取不當(dāng)會(huì)導(dǎo)致直流電壓過(guò)大。
針對(duì)下垂系數(shù)計(jì)算復(fù)雜的問(wèn)題,可采用模糊邏輯控制器實(shí)時(shí)調(diào)節(jié)下垂系數(shù)。模糊邏輯不依賴(lài)于精確模型,實(shí)現(xiàn)簡(jiǎn)單,通過(guò)判斷輸入量的偏差大小與變化趨勢(shì),依據(jù)預(yù)先設(shè)定的規(guī)則輸出期望值,適用于非線(xiàn)性復(fù)雜系統(tǒng)的自適應(yīng)控制及優(yōu)化,如電機(jī)調(diào)速[15]、儲(chǔ)能管理[16]、多電平變流器開(kāi)關(guān)調(diào)制[17-18]等。
直流電壓偏差大小和系統(tǒng)穩(wěn)定時(shí)間對(duì)系統(tǒng)控制性能十分關(guān)鍵,但現(xiàn)有控制策略未能兼顧二者。因此,本文從這兩個(gè)角度分析不同工況對(duì)下垂系數(shù)的需求,并給出下垂系數(shù)取值范圍的計(jì)算方法。文中設(shè)計(jì)的基于模糊控制器的變下垂系數(shù)方法,不僅能夠監(jiān)測(cè)直流電壓偏差,而且能對(duì)直流電壓的變化趨勢(shì)進(jìn)行預(yù)判,通過(guò)實(shí)時(shí)調(diào)整下垂系數(shù)加快系統(tǒng)穩(wěn)定,避免直流電壓偏差過(guò)大。仿真結(jié)果驗(yàn)證了所提策略能夠有效增強(qiáng)FMS的抗擾性能。
1 多端FMS建模及端口控制模式
本文以基于MMC的四端口FMS為研究對(duì)象,結(jié)構(gòu)如圖1所示。設(shè)置MMC1采用定直流電壓控制(UdcQ端口),MMC2、MMC3采用下垂控制(下垂控制端口),MMC4則采用定有功功率控制(PQ端口)。

圖1 四端口FMS拓?fù)涫疽鈭DFig.1 Schematic diagram of topology of four-port FMS
1.1 FMS數(shù)學(xué)模型
設(shè)定功率由交流側(cè)流向直流側(cè)為正方向。當(dāng)電網(wǎng)電壓三相平衡時(shí),F(xiàn)MS在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型如式(1)所示,MMC的具體建模過(guò)程見(jiàn)文獻(xiàn)[19]。
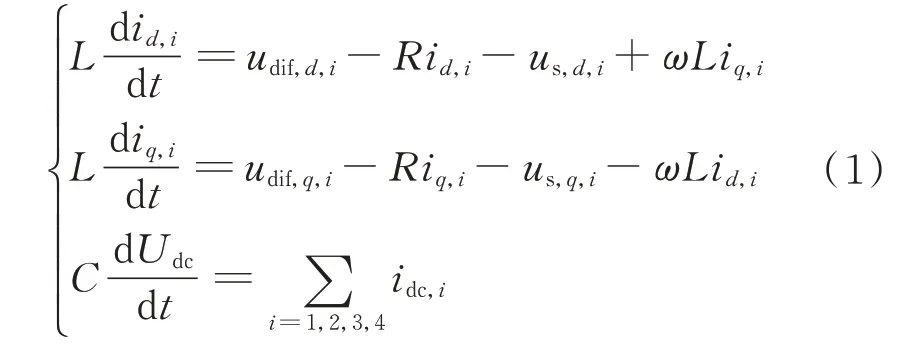
式中:i=1,2,3,4;id,i和iq,i分別為MMCi交流側(cè)電流的d軸和q軸分量;L和C分別為系統(tǒng)交流側(cè)等效電感和直流側(cè)等效電容;R為MMC橋臂等效電阻;udif,d,i和udif,q,i分別為MMCi橋臂差模電壓的d軸和q軸 分 量;us,d,i和us,q,i分 別 為MMCi端 口 交 流 系 統(tǒng) 電壓的d軸和q軸分量;ω為交流系統(tǒng)的電壓角頻率;Udc為直流側(cè)母線(xiàn)電壓;idc,i為MMCi的直流側(cè)電流。
忽略變流器內(nèi)部的損耗,正常工作時(shí)系統(tǒng)交、直流側(cè)的有功功率應(yīng)當(dāng)滿(mǎn)足以下關(guān)系:

式中:Pi為MMCi輸出的有功功率。
選取交流系統(tǒng)電壓空間矢量方向作為d軸,則可消去式中的q軸分量。由式(2)可知,配電網(wǎng)側(cè)的功率變化將引起直流電壓的波動(dòng)。
1.2 端口控制模式
各端口采用比例-積分(proportional-integral,PI)調(diào)節(jié)器進(jìn)行控制,控制模式如附錄A圖A1所示。圖 中:Pi,ref為MMCi的 輸 出 功 率 指 令 值;Udc,ref為 直 流 側(cè) 電 壓 的 指 令 值;id,i,ref為MMCi的d軸 電 流指令值;ku為控制系數(shù),取值范圍為[0,1]。
通過(guò)改變ku取值,可實(shí)現(xiàn)不同的控制模式。當(dāng)ku=1時(shí),表示該端口采用定直流電壓控制;當(dāng)ku=0時(shí),表示該端口采用定有功功率控制;當(dāng)0<ku<1時(shí),則表示該端口為下垂控制。針對(duì)下垂控制端口,穩(wěn)態(tài)時(shí)可列寫(xiě)如下關(guān)系式。

轉(zhuǎn)化得:

令K=ku/(1-ku)表示下垂系數(shù),K與ku的變化趨勢(shì)一致。
傳統(tǒng)下垂控制中,各端口換流器根據(jù)Udc的變化調(diào)整輸出功率,以維持系統(tǒng)穩(wěn)定。K的大小決定了換流器控制Udc的能力,K值越大,該換流器控制Udc的能力越強(qiáng)。
2 不同工況下系統(tǒng)對(duì)下垂系數(shù)的需求分析
在UdcQ端口與下垂控制端口共存的復(fù)合控制中,下垂系數(shù)的選取至關(guān)重要:下垂系數(shù)過(guò)小,可能導(dǎo)致系統(tǒng)對(duì)Udc控制能力不足;下垂系數(shù)過(guò)大,則可能導(dǎo)致UdcQ端口與下垂控制端口之間產(chǎn)生關(guān)于Udc的控制沖突[12-14]。FMS的抗擾能力主要體現(xiàn)在直流電壓偏差大小、系統(tǒng)穩(wěn)定時(shí)間這兩個(gè)方面,下文將結(jié)合具體工況,分析系統(tǒng)對(duì)K的需求。
2.1 工況1:UdcQ端口退出運(yùn)行
當(dāng)UdcQ端口退出運(yùn)行時(shí),兩類(lèi)端口間不存在控制沖突。
2.1.1直流電壓穩(wěn)態(tài)偏差分析
假設(shè)UdcQ端口退出運(yùn)行前工作在逆變狀態(tài),退出運(yùn)行時(shí)造成的系統(tǒng)功率缺額為ΔPΣ,忽略換流器內(nèi)部損耗。當(dāng)系統(tǒng)恢復(fù)穩(wěn)態(tài)時(shí),各下垂控制端口的PI控制器輸入應(yīng)為0,即

式中:下標(biāo)n為系統(tǒng)中下垂控制端口的個(gè)數(shù);Ki為下垂控制端口MMCi的下垂系數(shù)。
各端口的Udc變化一致,相加可得:

式中:ΔUdc為直流側(cè)電壓額定值與實(shí)際值之差。
不難發(fā)現(xiàn),在功率缺額一定的情況下,各端口下垂系數(shù)之和越大,系統(tǒng)穩(wěn)定時(shí)的Udc偏差就越小。各端口下垂系數(shù)依據(jù)額定容量大小進(jìn)行選取,滿(mǎn)足式(7)所列關(guān)系。

式中:Si和Sj分別為第i個(gè)和第j個(gè)端口的額定容量。
2.1.2系統(tǒng)穩(wěn)定時(shí)間分析
下垂控制端口的Pi與Udc變化趨勢(shì)如附錄A圖A2(a)所示。假定t0時(shí)刻UdcQ端口退出運(yùn)行,此時(shí)系統(tǒng)的不平衡功率定義為ΔPt0,經(jīng)過(guò)Δt的時(shí)間系統(tǒng)在下垂控制端口作用下恢復(fù)穩(wěn)定,也即t1時(shí)刻下垂控制端口的不平衡功率ΔPi滿(mǎn)足|ΔPi|=|KiΔUdc|時(shí)系統(tǒng)達(dá)到穩(wěn)態(tài)。可得如下關(guān)系式。

假設(shè)各端口下垂系數(shù)之和較大,直流電壓穩(wěn)態(tài)偏差近似為0,由此推得:


因此,在UdcQ端口退出運(yùn)行的工況下,從Udc穩(wěn)態(tài)偏差與系統(tǒng)穩(wěn)定時(shí)間兩個(gè)角度分析,系統(tǒng)對(duì)下垂系數(shù)K的需求一致,均要求K不能過(guò)小。
2.2 工況2:UdcQ端口與下垂控制端口均正常運(yùn)行
當(dāng)UdcQ端口與下垂控制端口均正常運(yùn)行時(shí),兩類(lèi)端口間可能存在直流電壓控制權(quán)的爭(zhēng)奪,對(duì)下垂系數(shù)的需求較為復(fù)雜。
2.2.1直流電壓穩(wěn)態(tài)偏差分析
當(dāng)系統(tǒng)出現(xiàn)擾動(dòng)引起Udc變化時(shí),Udc將由UdcQ端口與下垂控制端口共同控制,且最終會(huì)在UdcQ端口的作用下恢復(fù)額定值,不存在穩(wěn)態(tài)偏差。
2.2.2系統(tǒng)穩(wěn)定時(shí)間分析
以MMC4閉鎖為例進(jìn)行分析,假設(shè)MMC4閉鎖前工作于逆變狀態(tài)。下垂控制端口MMCi的Pi與Udc變化趨勢(shì)如附錄A圖A2(b)所示。此時(shí)系統(tǒng)恢復(fù)穩(wěn)定的過(guò)程包括兩個(gè)階段。第1階段UdcQ端口與下垂控制端口共同參與直流電壓的控制,在下垂控制端口達(dá)到|ΔPi|=|KiΔUdc|這一工作點(diǎn)時(shí),Udc變化到最大值。類(lèi)似可以得出:

第2階段中,下垂控制端口的定功率控制部分起主導(dǎo)作用,在ΔPi=0且KiΔUdc=0時(shí),系統(tǒng)恢復(fù)穩(wěn)定,可以得出:


MMC2、MMC3發(fā)生功率波動(dòng)的情況與之類(lèi)似,不再具體展開(kāi)。
因此,當(dāng)UdcQ端口與下垂控制端口均正常運(yùn)行時(shí),系統(tǒng)對(duì)K的需求較為復(fù)雜,過(guò)大或過(guò)小的下垂系數(shù)都會(huì)使得系統(tǒng)恢復(fù)穩(wěn)定的時(shí)間延長(zhǎng),影響控制性能。
2.3 小結(jié)
經(jīng)上文分析發(fā)現(xiàn),不同工況下系統(tǒng)對(duì)下垂系數(shù)的需求大小并不相同,如附錄A圖A3所示。可以看出,當(dāng)直流電壓偏差值相同時(shí),系統(tǒng)對(duì)下垂系數(shù)的需求仍會(huì)存在差異。因此,在改變下垂系數(shù)時(shí)需要同時(shí)考慮Udc的偏差大小及其變化趨勢(shì):當(dāng)Udc偏差值較小且沒(méi)有繼續(xù)增大的趨勢(shì)時(shí),系統(tǒng)無(wú)須增強(qiáng)Udc控制能力,下垂系數(shù)應(yīng)較小,以免下垂控制端口與UdcQ端口的控制區(qū)間重合;當(dāng)Udc偏差值較大且有繼續(xù)增大的趨勢(shì)時(shí),說(shuō)明系統(tǒng)當(dāng)前對(duì)Udc的控制能力不足,下垂系數(shù)應(yīng)快速增大,以加快系統(tǒng)穩(wěn)定。
3 基于模糊邏輯的變下垂系數(shù)方法
復(fù)合控制中,若采用固定的下垂系數(shù),則難以同時(shí)滿(mǎn)足多種工況的運(yùn)行需求,可能導(dǎo)致系統(tǒng)穩(wěn)定較慢。因此,本文提出一種基于模糊邏輯的變下垂系數(shù)方法,通過(guò)監(jiān)測(cè)直流電壓的偏差大小及其變化趨勢(shì),實(shí)時(shí)改變下垂系數(shù),以加快系統(tǒng)穩(wěn)定。此外,為避免直流電壓偏差過(guò)大,對(duì)下垂系數(shù)的取值范圍進(jìn)行了限制。
3.1 原理分析


當(dāng)UdcQ端口由于交流側(cè)故障、內(nèi)部故障等原因主動(dòng)退出運(yùn)行時(shí),Udc將失去控制且持續(xù)變化。模糊控制器檢測(cè)到這一趨勢(shì)輸出較大的ku值,MMC2、MMC3轉(zhuǎn)入下垂控制,共同控制Udc。這一過(guò)程不存在電壓指令值的切換且不會(huì)造成過(guò)沖,優(yōu)于傳統(tǒng)電壓裕度控制。
3.2 模糊邏輯控制器的設(shè)計(jì)
模糊控制是一種模仿人類(lèi)模糊推理和決策過(guò)程的智能控制方法,實(shí)現(xiàn)簡(jiǎn)單,其原理框圖如附錄A圖A5所示[20]。圖中:L1和L2分別為輸入量ΔUdc和ΔU˙dc的轉(zhuǎn)換因子;L3為輸出量ku的轉(zhuǎn)換因子。
轉(zhuǎn)換因子可將輸入量與輸出量轉(zhuǎn)換到論域范圍內(nèi),這樣針對(duì)不同的系統(tǒng),只需調(diào)整轉(zhuǎn)換因子的大小,控制器的核心區(qū)域可以通用。
3.2.1論域與轉(zhuǎn)換因子

模糊控制器的輸出量為ku,轉(zhuǎn)換因子L3設(shè)置為1,ku的論域計(jì)算過(guò)程如下。
ku的變化使得下垂系數(shù)K實(shí)時(shí)改變,可能會(huì)對(duì)系統(tǒng)穩(wěn)定性造成影響[22],因此針對(duì)下垂控制端口建立控制模型,以整定下垂系數(shù)的合理變化范圍,分析過(guò)程詳見(jiàn)附錄B。最終得出,為保證系統(tǒng)穩(wěn)定性,ku的取值應(yīng)小于0.98。
經(jīng)2.1節(jié)可知,當(dāng)UdcQ端口退出運(yùn)行時(shí),K取值過(guò)小將導(dǎo)致直流電壓穩(wěn)態(tài)偏差較大,因此在該種情況下計(jì)算K的下限值。
考慮最嚴(yán)重的情況,UdcQ端口在滿(mǎn)載時(shí)退出運(yùn)行,由下垂控制端口接替Udc控制功能,并將偏差控制在額定值的±5%以?xún)?nèi)。假設(shè)UdcQ端口退出運(yùn)行前處于整流狀態(tài),退出后電壓下降,則由式(6)可得:

即

本文設(shè)定各端口容量相同,均為1(標(biāo)幺值),由式(7)可知,MMC2與MMC3的下垂系數(shù)相等。計(jì)算出K的下限值為4.08,由K=ku/(1-ku)可得ku下限值為0.80。
綜上所述,ku的取值范圍為0.80≤ku<0.98。此外系統(tǒng)穩(wěn)定運(yùn)行時(shí),Udc在額定值附近可能存在微小波動(dòng),此時(shí)下垂系數(shù)應(yīng)為0,以免放大Udc的變化。因此加入一個(gè)死區(qū),在Udc波動(dòng)小于0.5%時(shí)使得ku為0,MMC2與MMC3工作于定功率狀態(tài)。
3.2.2模糊集合與隸屬函數(shù)
輸入量在映射到論域中后,將進(jìn)行模糊化處理,用代表大小關(guān)系的語(yǔ)言變量值來(lái)表示原本的精確數(shù)值[16],并用0~1之間的實(shí)數(shù)來(lái)表達(dá)某一輸入量屬于該語(yǔ)言變量的程度,即隸屬度。這里,輸入量的語(yǔ)言變 量 值 設(shè) 置 為 負(fù) 大(negative big,NB)、負(fù) 小(negative small,NS)、零(zero,ZO)、正小(positive small,PS)、正大(positive big,PB),輸出量設(shè)為大(big,B)、中(middle,M)、小(small,S)。
描述隸屬度的函數(shù)稱(chēng)為隸屬函數(shù)。輸入量的隸屬函數(shù)采用如附錄A圖A6(a)所示的s形函數(shù)與三角形函數(shù);輸出量的隸屬函數(shù)如圖A6(b)所示。
3.2.3模糊控制規(guī)則
模糊控制規(guī)則即為期望控制器實(shí)現(xiàn)的輸出情況,如表1所示。以第1條規(guī)則為例進(jìn)行解釋。當(dāng)ΔUdc為NB且ΔU˙dc為NB時(shí),ku為B。ΔUdc為NB表示此時(shí)Udc遠(yuǎn)大于指令值,ΔU˙dc為NB表示Udc正以較大的速率增大,也即Udc正在向遠(yuǎn)離指令值的方向快速變化,因此需要加強(qiáng)下垂控制端口對(duì)于Udc的控制作用,輸出較大的ku值。每次計(jì)算輸出的ku值都與初始值相加,參與本次控制,初始值可設(shè)為0。

表1 模糊控制規(guī)則Table 1 Fuzzy control rule
模糊推理和去模糊化選用普遍使用的Mamdani法及重心法[17]。模糊推理獲得的仍是模糊量,經(jīng)過(guò)去模糊化,才能得到清晰的輸出值。綜上所述,得到模糊邏輯控制器的輸出曲面如附錄A圖A7所示。
4 仿真驗(yàn)證
為了驗(yàn)證所提協(xié)調(diào)控制策略的有效性,在MATLAB/Simulink中搭建了如圖1所示的四端口MMC-FMS仿真模型,各端MMC的參數(shù)一致,如附錄A表A1所示。MMC采用經(jīng)典雙閉環(huán)控制,并加以環(huán)流抑制策略。調(diào)制策略采用最近電平逼近調(diào)制,輔以排序算法實(shí)現(xiàn)電容電壓均衡控制。
本文針對(duì)3類(lèi)控制端口分別設(shè)置擾動(dòng)情況,包括常見(jiàn)擾動(dòng)如功率階躍,以及極端情況如某端口主動(dòng)退出運(yùn)行、交流側(cè)三相接地短路故障、潮流反轉(zhuǎn),并將所提策略與傳統(tǒng)協(xié)調(diào)控制策略進(jìn)行對(duì)比。
4.1 案例1:UdcQ端口退出運(yùn)行
當(dāng)系統(tǒng)中UdcQ端口由于自身故障退出運(yùn)行時(shí),其他端口應(yīng)能迅速平衡功率缺額,維持直流電壓穩(wěn)定,并減小過(guò)渡過(guò)程中的暫態(tài)電壓。基于此,設(shè)置UdcQ端口主動(dòng)退出運(yùn)行,并將所提策略與傳統(tǒng)電壓裕度控制進(jìn)行對(duì)比。0.5 s時(shí)仿真系統(tǒng)已進(jìn)入穩(wěn)定運(yùn)行狀態(tài)。MMC2、MMC3、MMC4的有功功率指令值分別為-0.3、0.3、-0.5(標(biāo)幺值)。MMC1平衡有功功率,控制直流電壓的穩(wěn)定。電壓裕度控制中,設(shè)置MMC2為備用端口,電壓裕度參照文獻(xiàn)[10]設(shè)置為額定值的±4%,MMC3工作在定功率控制模式。0.8 s時(shí)MMC1主動(dòng)退出運(yùn)行。
圖2為電壓裕度控制與所提控制策略的仿真波形。由圖2(b)、(c)可以看出,傳統(tǒng)電壓裕度控制中,MMC1退出運(yùn)行后,備用端口MMC2經(jīng)0.07 s才開(kāi)始改變輸出功率,響應(yīng)較慢,Udc超調(diào)量達(dá)到3.3%,系統(tǒng)0.5 s后才恢復(fù)穩(wěn)態(tài)。而所提控制策略根據(jù)Udc的波動(dòng)情況,輸出較大的下垂系數(shù),將UdcQ端口退出產(chǎn)生的功率缺額分配給下垂端口MMC2、MMC3共同承擔(dān),動(dòng)態(tài)響應(yīng)較快,Udc超調(diào)量減少到1.7%,穩(wěn)態(tài)偏差為1.5%,系統(tǒng)0.3 s后即恢復(fù)穩(wěn)態(tài)。附錄A圖A8展示了模糊控制器輸出量的變化情況,UdcQ端口退出運(yùn)行后,ku值快速增大到0.89附近,使得MMC2、MMC3具有較強(qiáng)的Udc控制能力。

圖2 UdcQ端口退出運(yùn)行時(shí)的仿真波形Fig.2 Simulation waveforms when UdcQ port quits
4.2 案例2:下垂控制端口饋線(xiàn)故障及內(nèi)部故障
三相短路故障是交流系統(tǒng)短路故障中最為嚴(yán)重的情況,因此在下垂控制端口MMC3交流側(cè)饋線(xiàn)施加三相短路擾動(dòng),以驗(yàn)證FMS的抗擾性能。系統(tǒng)初始運(yùn)行狀態(tài)與4.1節(jié)相同。0.8 s時(shí)MMC3交流側(cè)發(fā)生三相短路,持續(xù)時(shí)間為0.15 s。1.5 s時(shí)MMC3由于內(nèi)部故障退出運(yùn)行。
將所提策略與電壓裕度控制、傳統(tǒng)復(fù)合控制(下垂系數(shù)固定)進(jìn)行對(duì)比,仿真結(jié)果如圖3所示。傳統(tǒng)復(fù)合控制中,下垂系數(shù)K參照文獻(xiàn)[21]取為5%,即變流器輸出功率從0變化到額定值時(shí)直流側(cè)電壓的變化范圍,代入?yún)?shù)計(jì)算結(jié)果為8.16。

圖3 下垂控制端口故障情況仿真波形Fig.3 Simulation waveforms under fault condition of droop control port
當(dāng)饋線(xiàn)發(fā)生三相短路后,交流側(cè)電壓下降為0,同時(shí)電流迅速增大,超過(guò)保護(hù)電流限制后,MMC3將會(huì)閉鎖,輸出電流減小為0,在故障清除后恢復(fù)初始運(yùn)行狀態(tài)。MMC3的交流側(cè)電壓、電流波形如附錄A圖A9所示。由圖3可以看出,電壓裕度控制中,MMC3由于交流側(cè)故障或內(nèi)部故障閉鎖造成的功率缺額由MMC1獨(dú)立承擔(dān),輸出功率超調(diào)且Udc波動(dòng)較大。1.5 s時(shí)MMC3閉鎖后,系統(tǒng)經(jīng)過(guò)0.3 s才恢復(fù)穩(wěn)態(tài)。MMC2與MMC4的輸出功率未受影響。采用傳統(tǒng)復(fù)合控制后,下垂控制端口MMC2與UdcQ端口MMC1共同參與直流電壓的控制,調(diào)節(jié)功率平衡,Udc波動(dòng)減小且穩(wěn)定較快,1.5 s時(shí)MMC3閉鎖后,系統(tǒng)經(jīng)過(guò)0.2 s便恢復(fù)穩(wěn)態(tài)。
所提策略中,模糊控制器根據(jù)直流電壓偏差與變化趨勢(shì)實(shí)時(shí)改變下垂系數(shù),避免下垂端口與UdcQ端口間的控制沖突,因此相較于傳統(tǒng)復(fù)合控制穩(wěn)定更快。0.8 s時(shí)MMC3閉鎖,0.87 s時(shí)系統(tǒng)便恢復(fù)穩(wěn)態(tài);1.5 s時(shí)MMC3再 次 閉鎖,1.57 s時(shí) 系 統(tǒng) 便恢 復(fù)穩(wěn)態(tài)。
4.3 案例3:PQ端口功率階躍及潮流反轉(zhuǎn)
考慮配電網(wǎng)中風(fēng)電、光伏等新能源滲透率不斷提高,此類(lèi)能源隨機(jī)性較強(qiáng),饋入配電網(wǎng)的功率可能發(fā)生突變。因此,設(shè)置PQ端口MMC4所接饋線(xiàn)的功率發(fā)生階躍變化及潮流反轉(zhuǎn),驗(yàn)證所提策略在穩(wěn)態(tài)運(yùn)行時(shí)的抗擾能力。系統(tǒng)初始運(yùn)行狀態(tài)與4.1節(jié)相同。0.8 s時(shí)MMC4有功功率由-0.5突變至-0.7(標(biāo)幺值),1.3 s時(shí)發(fā)生潮流反轉(zhuǎn)。
將所提策略與電壓裕度控制、傳統(tǒng)復(fù)合控制進(jìn)行對(duì)比,仿真結(jié)果如圖4所示。0.8 s時(shí)MMC4的功率階躍變化不大,因此3種控制方式中,各端口輸出功率與直流電壓都僅有小幅波動(dòng)。
1.3 s時(shí)MMC4發(fā)生潮流反轉(zhuǎn),3種策 略 的 控 制效果差別較大。傳統(tǒng)電壓裕度控制中,UdcQ端口MMC1獨(dú)立進(jìn)行調(diào)節(jié),功率超調(diào)嚴(yán)重,且Udc波動(dòng)較大,系統(tǒng)在1.7 s時(shí)恢復(fù)穩(wěn)定。傳統(tǒng)復(fù)合控制與所提策略中,在Udc增大階段,下垂控制端口MMC2、MMC3與UdcQ端 口MMC1共 同 參 與 功 率 平 衡 控制,MMC1功率超調(diào)現(xiàn)象得到改善,Udc波動(dòng)幅度減小且更快到達(dá)最大值;在Udc由最大值恢復(fù)到額定值的過(guò)程中,傳統(tǒng)復(fù)合控制由于下垂系數(shù)取值固定,下垂控制端口與UdcQ端口之間存在控制沖突,導(dǎo)致系統(tǒng)穩(wěn)定時(shí)間延長(zhǎng),由圖4(b)可以看出,直到1.8 s,MMC2、MMC3才恢復(fù)初始輸出功率。而所提控制策略可以快速減小下垂系數(shù),避免兩類(lèi)端口間的控制矛盾,1.5 s時(shí)系統(tǒng)便恢復(fù)穩(wěn)定,穩(wěn)定所需時(shí)間少于傳統(tǒng)復(fù)合控制。

圖4 MMC4功率階躍及潮流反轉(zhuǎn)時(shí)的仿真波形Fig.4 Simulation waveforms with power step change and power reversal of MMC4
結(jié)合不同工況下的仿真結(jié)果可知,相較于傳統(tǒng)電壓裕度控制,發(fā)生擾動(dòng)時(shí)所提控制策略可以將功率缺額在多個(gè)端口間進(jìn)行合理分配,從而減小直流電壓波動(dòng),縮短恢復(fù)穩(wěn)定時(shí)間,在UdcQ端口退出運(yùn)行時(shí)可減小直流電壓穩(wěn)態(tài)偏差;相較于定下垂系數(shù)的傳統(tǒng)復(fù)合控制,所提控制策略能夠?qū)崟r(shí)調(diào)整下垂系數(shù),加快系統(tǒng)穩(wěn)定。可見(jiàn)相較于傳統(tǒng)的協(xié)調(diào)控制策略,所提策略能更好地增強(qiáng)多端FMS的抗干擾能力。
5 結(jié)語(yǔ)
為增強(qiáng)多端FMS的抗擾性能,本文提出一種新型協(xié)調(diào)控制策略,設(shè)置定直流電壓控制端口與下垂控制端口,從直流電壓穩(wěn)態(tài)偏差、系統(tǒng)穩(wěn)定時(shí)間兩個(gè)角度分析不同工況下系統(tǒng)對(duì)下垂系數(shù)的需求,據(jù)此設(shè)計(jì)出一種基于模糊邏輯的變下垂系數(shù)方法,并給出下垂系數(shù)取值范圍的計(jì)算方法。該策略可監(jiān)測(cè)直流電壓偏差值及其變化趨勢(shì),實(shí)時(shí)調(diào)整下垂系數(shù),避免不同端口間關(guān)于直流電壓的控制沖突。最后將本文所提控制策略與傳統(tǒng)協(xié)調(diào)控制策略進(jìn)行仿真對(duì)比,結(jié)果表明,所提策略在系統(tǒng)受擾后可有效減小直流電壓穩(wěn)態(tài)偏差、加快系統(tǒng)穩(wěn)定。
本文所設(shè)計(jì)的協(xié)調(diào)控制策略可實(shí)現(xiàn)不同工況下對(duì)多端FMS的有效控制,但對(duì)于文中采用的模糊邏輯控制器,目前還沒(méi)有成熟的方法來(lái)確定隸屬函數(shù),需要通過(guò)實(shí)驗(yàn)不斷調(diào)整,普適性與可推廣性有待進(jìn)一步加強(qiáng)。
附錄見(jiàn)本刊網(wǎng)絡(luò)版(http://www.aeps-info.com/aeps/ch/index.aspx),掃英文摘要后二維碼可以閱讀網(wǎng)絡(luò)全文。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
