計及充電站無功補償的配電網日前-實時協調優化模型
2021-09-13 01:41:28王強鋼田雨禾胡方霞周念成
電力系統自動化 2021年17期
王強鋼,田雨禾,王 健,胡方霞,周念成
(1.輸配電裝備及系統安全與新技術國家重點實驗室(重慶大學),重慶市 400044;2.重慶工商職業學院電子信息工程學院,重慶市 400052)
0 引言
近年來,環境污染和化石能源危機日益嚴重。綠色高效的電動汽車(electric vehicle,EV)對解決環境和能源問題起到了重要作用,EV接入配電網規模也日益增加[1-2]。但EV充電負荷具有隨機性和分散性,大規模EV接入配電網將產生不可忽視的影響,可能引起線路過載、網損增大或在負荷峰值時段造成配電網低電壓問題[3-4]。這對配電網安全穩定運行提出了挑戰,故需要對EV充放電進行控制。
針對EV的充放電控制,文獻[5]提出了EV分級充電控制策略用于降低配電網負荷峰谷差,文獻[6]建立了基于區域交通網和出行鏈模擬的EV充電負荷預測模型,文獻[7]建立了基于路網-電網交互式框架的EV充電負荷預測模型。據此,文獻[8]分析了在充電價格差異較大的情況下,通過電動汽車入網(V2G)技術能夠降低配電網運營成本。上述文獻集中于EV的有功功率控制,但EV通過充電樁的變流器接口接入電網,除有功功率外,還有一定的無功補償能力,可用于改善配電網電壓質量[9-10]。
配電網電壓調節主要有電容器組(capacitor bank,CB)和有載調壓變壓器(on-loadtap changer,OLTC)等裝置[11-12]。然而,傳統電壓調節裝置響應速度慢,應對EV不確定接入的能力較差。而充電樁具有靈活、快速的控制特性,對EV主動控制能夠有效地改善配電網的電壓分布[13]。文獻[14-15]利用雙向充電樁進行電壓調節,文獻[16]基于對充電樁的功率因數調節的策略來實現節點電壓穩定運行。前述文獻僅分析了充電樁的無功功率調節能力,但未與配電網已有的電壓調節裝置進行綜合調控。
當EV充放電控制時須考慮其荷電狀態(state of charge,SOC)約束,文獻[17]建立了考慮EV數量和SOC約束的EV可調度模型,文獻[18]建立了考慮移動儲能特性的EV模型,但僅考慮EV統一的SOC邊界約束(即固定的最大和最小區間),未考慮不同EV的SOC邊界差異。對此,文獻[19]提出了計及SOC邊界的EV接入配電網的實時優化調度方法,在此基礎上,文獻[20]提出了一種基于聚合商模型的大規模EV的SOC評估方法。但是,現有研究采用的SOC邊界沒有計及EV前一時刻SOC的影響,可能造成鄰近SOC邊界時EV的功率分配不當導致SOC越限。
為解決以上問題,本文提出了一種計及充電站無功補償的配電網日前-實時協調優化模型。日前優化模型以配電網運營成本最低為優化目標,有載調壓變壓器和電容器組等設備調節限制為約束條件。然后,實時優化以日前優化結果為運行參考點,通過多層優化模型之間協調互補,實現配電網、電動汽車充電站(electric vehicle charging station,EVS)和EV之間功率的有效分配。此外,為保證EV離開時達到期望SOC,充分考慮了SOC邊界條件。最后,通過算例分析驗證了該模型的有效性。
1 日前-實時協調優化框架
計及充電站無功補償的配電網日前-實時優化框架如附錄A圖A1所示。框架由日前優化和實時優化兩部分組成,日前-實時優化框架中配電網、充電站和EV的具體執行步驟如下。
步驟1:在日前優化部分,充電站將所有EV數據的概率分布傳輸給配電網,包括初始時刻、離開時刻、初始SOC和離開時的SOC。
步驟2:配電網根據信息,結合分時電價、負荷需求曲線、網絡參數、有載調壓參數和電容器組參數,建立了配電網運營成本最低的優化模型。
步驟3:將充電站日前有功功率、電容器組投切和有載調壓擋位作為實時優化的參考運行點,以降低實時優化中配電網的運營成本。
步驟4:在實時優化部分,當EV接入充電樁后,充電站根據EV的初始時刻、離開時刻、初始SOC和離開時的SOC,計算出其有功功率范圍和SOC范圍,然后將信息提供給配電網。
步驟5:配電網根據信息,結合充電站日前有功功率,建立以充電站有功功率偏差最小為目標的優化模型,計算出充電站的有功功率。
步驟6:充電站根據信息建立以EV的總無功容量最大為目標的優化模型,計算出EV的有功功率和最大無功容量。
步驟7:充電站根據EV的最大無功容量,計算出充電站的最大無功容量,然后將信息提供給配電網。
步驟8:配電網根據信息建立以網損最小為目標的優化模型,計算出充電站實際的無功功率。
步驟9:充電站根據信息建立以EV的總視在功率最小為目標的優化模型,計算出EV實際的無功功率。
步驟10:EV在步驟6和9中執行來自充電站的有功和無功功率信號。
步驟11:下一個時間周期的EV參數更新時,重復步驟4至步驟10。
2 日前優化模型建立
2.1 EVS日前功率模型
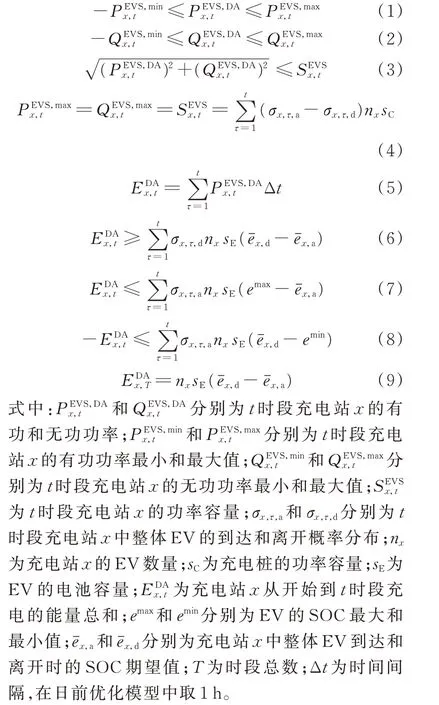
EVS日前功率模型是基于整體EV數據的概率分布進行建模,不同EV的充放電狀態不同,而不同狀態對應的損耗模型也有所區別。在日前優化中忽略了充放電損耗,表達式為:
2.2 日前優化模型
日前優化模型約束條件包括潮流方程、安全約束、有載調壓變壓器約束和電容器組裝置約束。
1)潮流方程
文獻[21-22]采用線性化DistFlow模型來表示潮流方程,且考慮了系統網損。本文基于DistFlow線性化方程,配電網的潮流方程表達式為:



3)有載調壓變壓器約束
本文對有載調壓作了簡化處理,將變壓器模型等效為一個節點處理,即不考慮變壓器支路,節點電壓變成可調變量,即

4)電容器組裝置約束
本文假設每組電容器的調節容量一定,通過調節投運組數來優化電網運行情況,即
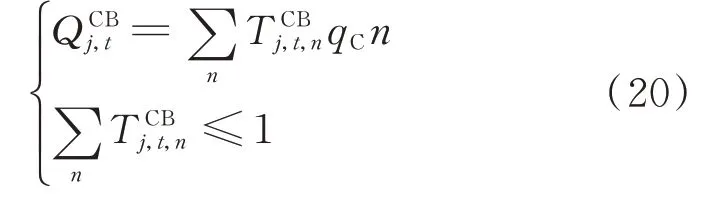

式中:ct為分時電價;cL為損耗成本;cC為電容器組無功補償成本;cQ為EV無功成本;Pg,t為從上級電網注入配電網的有功功率;E為網絡中所有支路集合;NCB為包含電容器組裝置的節點集合;NEVS為包含充電站的節點集合;cT為每次有載調壓的成本;nT為T時段有載調壓的總次數。
3 實時優化模型建立
3.1 EV功率模型

EV的SOC表 示 為:

式中:ex,y,t為t時段充電站x中第y個EV的SOC;在實時優化模型中,時間間隔Δt取15 min。
當EV接入充電樁時,通過EV上的電池管理系統獲取電池當前SOC、EV停留時間和離開時期望的SOC,來確定SOC邊界[19-20]。如圖1所示,紅色和綠色曲線分別表示SOC的上邊界和下邊界。

圖1 EV的SOC動態邊界Fig.1 Dynamic SOC boundary for EV
在本文的模型中,配電網首先是調度充電站,如果充電站的SOC邊界僅基于EV的SOC邊界,則可能會增加其SOC邊界的范圍,導致優化時可能造成鄰近SOC邊界時EV的功率分配不當導致SOC越限,而不能確保EV離開時達到期望的SOC。為了解決此問題,考慮EV前一時刻的SOC。SOC動態邊界表達式為:


式 中:NEV為 充 電 站x中EV的 集 合;Ex,t為t時 段 充電站x內所有EV的SOC總和。
3.3 實時優化模型
實時優化模型包括配電網和充電站的有功和無功優化模型。
1)模型1為配電網有功優化模型
當EV接入充電樁后,提供電池當前SOC、停留時間以及離開時期望的SOC等信息,充電站根據EV信息產生其電池側功率范圍和SOC范圍。配電網基于充電站提供的信息和充電站日前有功功率建立優化模型,配電網有功優化模型優化目標是充電站的有功功率偏差最小。


由此,該目標函數線性化為:

約束條件為式(33)至式(36)。
模型1是被設計來決定每個充電站電池側的實際功率,同時有功功率偏差最小能夠有效減少配電網運營成本。
2)模型2為充電站有功優化模型
在確定充電站電池側的有功功率之后,通過以下優化模型可以得到EV電池側的有功功率,即

約束條件為式(23)、式(26)至式(30),以及式(39)和式(40)。

模型2的優化目標是EV的總無功容量最大,而且確保EV有足夠的無功補償能力。
3)模型3為配電網無功優化模型
充電站將基于EV的無功容量和有功功率提供給配電網,通過以下優化模型可以得到充電站的無功功率,即

約 束 條 件 為 式(10)至 式(21)和 式(31)、式(32)。
模型3的優化目標是網損最小。
4)模型4為充電站無功優化模型
基于充電站的無功功率,通過以下優化模型可以得到EV的無功功率,即

約束條件為式(24)、式(25),以及式(43)和式(44)。
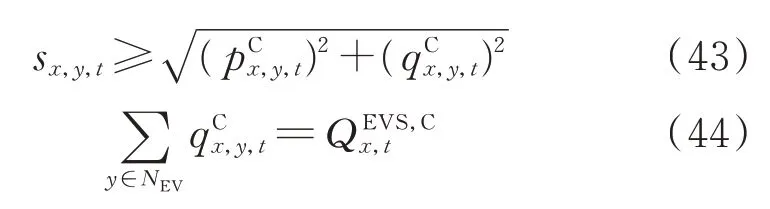
式 中:sx,y,t為t時 段 充 電 站x中 第y個EV的 視 在功率。
模型4的優化目標是EV的總視在功率最小,同時避免充電樁的過載情況。
式(3)、式(15)、式(17)、式(25)、式(32)、式(39)和式(43)是非線性方程,會增加優化模型求解的難度,文獻[23]通過圓約束和二次平方項線性化的方法對方程進行線性化處理。本文采用分段線性化法將日前優化和實時優化模型線性化處理。
4 算例分析
4.1 算例基礎數據
本文采用IEEE 33節點系統來驗證模型的有效性。算例是采用MATLAB R2018a-YALMIP仿真平臺進行測試,并調用CPLEX12.10.0版本進行優化求解,電腦的硬件參數為主頻3 GHz、內存8 GB[24]。
IEEE 33節點系統如圖2所示,節點1為有載調壓變壓器,初始擋位為3,有5個調節擋位,調節范圍為[0.98,1.02]。節點3、8、14、19、23、30為EVS,每個節點有100臺EV進行充電,充電樁功率容量為7 kVA,電池容量為60 kW·h,充放電的效率為95%。EV的到達和離開概率分布分別符合正態分布N(19 h,12)和均勻分布U(6 h,8 h),初始SOC符合正態分布N(0.6,0.12),離開時的SOC值都設為0.95。節點10、16、28安裝有電容器組投切裝置,其中每個節點為4組,每組大小為0.05 Mvar。節點電壓限制是[0.95,1.05]p.u.。負荷需求和分時電價如附 錄A圖A2所示,EV的 控制周期為17:00—次日08:00。
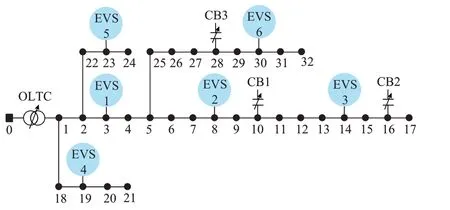
圖2 IEEE 33節點系統Fig.2 IEEE 33-bus system
4.2 日前優化結果分析
為了驗證充電站無功補償在日前優化模型中的有效性,設立如下3個案例進行分析。
案例1:無有載調壓和電容器組投切裝置,EV的無功功率不可注入。
案例2:投入有載調壓和電容器組投切裝置,EV的無功功率不可注入。
案例3:投入有載調壓和電容器組投切裝置,EV的無功功率可注入。
表1所示為不同案例日前優化模型的仿真結果。

表1 日前優化結果Table 1 Results of day-ahead optimization
案例1沒有考慮有載調壓、電容器組投切裝置和EV無功成本,購電成本、網損成本和總成本在3個方案中最高。相比于案例1,案例2增加了有載調壓和電容器組投切裝置,購電成本、網損成本和總成本都有所降低。在案例3中,注入EV的無功功率使得購電成本、網損成本、電容器組成本進一步減少,總成本在3個案例中最低。
附錄A圖A3為不同案例日前優化模型的配電網電壓曲線。在案例1中,平均電壓和最低電壓均存在低于電壓下限的情況;案例2通過投入有載調壓和電容器組投切裝置提升了配電網節點電壓,節點28~32的最低電壓低于電壓下限,如附錄A圖A4所示,有載調壓調節一次到5擋,電容器組投切組數較多;案例3通過增加EV的無功功率進一步改善配電網節點電壓,相比于案例2,所有節點電壓均在電壓下限之上,有載調壓調節擋位沒有調節,電容器組投切組數大幅減少。
4.3 實時優化結果分析
實時優化模型被稱為案例4。案例4中購電成本、網損成本、電容器組成本、有載調壓成本、EV無功成本和總成本分別為42 592、3 521、115、0、631、46 859元,總成本比案例3更高,因為日前優化模型是基于整體EV概率分布的,僅考慮到EV的數量、電池容量和充電樁功率容量,忽略了每個充電樁的有功和無功功率約束,以及EV的SOC邊界,會造成日前優化模型中充電站提供的無功補償范圍更大,方案3中購電成本和網損成本更低一些。附錄A圖A5為案例4的配電網電壓曲線,可見所有節點電壓都大于電壓下限,電壓曲線與案例3大致相同,證明日前優化模型能夠作為實時優化模型的參考對象。
案例4中充電站的有功和無功功率如附錄A圖A6所示。17:00—20:00處于負荷高峰階段,充電站的有功功率很小,20:00—21:00充電站有功功率開始注入配電網。在負荷低谷階段,充電站有功功率從24:00開始增加到次日05:00,后因EV逐漸離開充電站,有功功率從05:00開始降低。充電站的無功功率通常為負,說明EV在配電網進行無功補償,在高負荷需求時段(19:00—23:00)有大量無功功率注入配電網。
4.4 求解效率分析
通過分段線性化法將日前優化和實時優化模型線性化處理,日前優化模型是線性規劃模型,實時優化的模型1到模型4是線性規劃或者混合整數線性規劃模型[23]。日前和實時優化求解時間如表2所示。日前優化求解時間小于10 s,實時優化求解時間小于0.1 s,能夠滿足EV的實時優化運行要求。

表2 日前和實時優化求解時間Table 2 Solving time of day-ahead and real-time optimization
5 結語
本文提出了一種計及充電站無功補償的日前-實時協調優化模型,通過算例分析,結果表明:
1)日前優化模型能夠提供配電網運營成本最小的優化結果,基于日前優化結果和EV實時參數建立實時優化模型,日前和實時優化之間緊密聯系,綜合提高了配電網經濟性;
2)當注入EV的無功功率時,配電網運營成本最低,EV通過充電樁分擔了一部分無功補償需求,使得電容器組補償的無功功率和有載調壓調節次數有所下降,對配電網電壓調節有著積極的影響;
3)在滿足期望的SOC需求基礎上,EV可根據分時電價錯開負荷高峰期進行充電,避免增加配電網負擔。
附錄見本刊網絡版(http://www.aeps-info.com/aeps/ch/index.aspx),掃英文摘要后二維碼可以閱讀網絡全文。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
少先隊活動(2021年2期)2021-03-29 05:40:48
中學生數理化(高中版.高二數學)(2019年6期)2019-06-24 03:37:50
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
中國公路(2017年7期)2017-07-24 13:56:38
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
