人工智能系統故障分析原理研究
2021-09-11 03:13:54崔鐵軍李莎莎
智能系統學報 2021年4期
崔鐵軍,李莎莎
(1.遼寧工程技術大學 安全科學與工程學院,遼寧 葫蘆島 125105;2.遼寧工程技術大學 工商管理學院,遼寧葫蘆島 125105)
隨著科技水平的進步,未來系統必將是無人化、智能化、信息化和數據化的復雜系統。人們設計系統必須解決兩個問題:1)系統的功能性,2)系統的可靠性。它們都將導致系統故障[1-2]。系統的功能性是系統必須達到設計的功能和目的。現在設計制造系統都能達到這種要求,即實現系統功能性是相對簡單的,技術是成熟的。系統可靠性指系統在規定條件下和規定時間內完成預定功能的能力。可靠性強調系統在完成功能的前提下保持功能的穩定性。例如:系統可以完成一項工作,但該類系統中每個實例系統完成該工作的能力不同。在技術不足時系統對功能性的要求一般大于可靠性;而在技術成熟后對可靠性要求大于功能性。而且一般可靠性和功能性難以兼得。例如,某型坦克的炮管規定發射2 000 發炮彈后必須更換。但實際情況可能發生3 000 發后仍可繼續發射,但這時極有可能發生炸膛。因此必須在炮管可靠性較高時停止使用,以保證其可靠性,但犧牲了它的功能性。這種情況對簡單系統分析是容易的,但對具有復雜特征的系統而言很困難。
這些困難當然與系統的復雜性有關,但更為重要的是方法論的天然缺陷。由于伴隨著人類發展而建立的科學體系之前面對的系統都是較為簡單的,進而形成了機械唯物主義科學觀,即機械還原方法論。認為系統可不加限制地進行拆分,再研究拆分得到的子系統的功能性和可靠性,最終通過系統與子系統的結構關系疊加子系統功能性和可靠性,得到系統的功能性和可靠性。這種思路廣泛應用于系統功能設計過程和可靠性分析過程,但忽略了子系統之間的相互作用,造成系統功能性和可靠性降低。特別是,復雜系統基于機械還原方法論將導致嚴重且頻繁的系統故障。因此,對于具有無人化、智能化、信息化和數據化的復雜系統,其系統故障分析必須克服上述問題。
系統故障的智能化分析在一定程度上可解決該問題。這方面最新的國內研究包括:天文望遠鏡智能故障輔助診斷[3],使用強化學習的電力通信網故障恢復[4],智能變電站二次設備故障診斷[5],地鐵車輛智能故障監測系統[6],多尺度熵滾動軸承故障可拓智能識別[7],高速公路機電設備智能維護[8],安全科學的故障信息轉換[9],人工智能電網調控[10],繼電保護智能運行管控[11],汽車發動機運行故障智能診斷[12]。國外也有大量研究,包括:機器學習與人工智能在復雜制造系統故障預測中的應用[13],分散群智能空調系統傳感器故障檢測[14],深度學習散熱器智能故障診斷[15],軸承故障分類特征提取方法[16],基于RPVM 和神經網絡的異步電動機轉子斷條檢測[17],高速鐵路故障診斷[18],風力發電機組先進人工智能保護技術[19],水輪機智能故障診斷[20]。雖然這些研究在相關領域取得了成果,但仍未擺脫方法論的本質問題。
目前人工智能研究主要有三大流派[21-24]。結構主義流派,認為信息與智能是人腦結構決定的,將人對信息的處理和智能行為歸結于人腦結構,例如神經網絡模型。功能主義流派,認為只需要在功能層面上對信息和智能進行處理,如專家系統。行為流派,通過感知客體的運行和行為來模擬智能行為。它們實質是對人工智能在三個角度的詮釋,不同角度理解不同。人工智能應該是腦的結構、功能和行為的統一,而不是相互割裂,甚至對立的。這也是目前智能科學發展中使用機械還原論造成的結果。
綜上,將以系統故障分析為主線,利用鐘義信教授提出的信息生態方法論作為智能分析方法論,討論人工智能系統故障分析原理。進而規避分而治之的機械還原方法論對系統故障分析帶來的問題。最終保障系統的功能性和可靠性,使系統安全運行。
1 系統故障的智能分析思路
隨著科技進步和人類發展,人造系統勢必將代替人的大部分功能。系統在完成這些功能的同時需要面對另一個重要問題,即完成這些功能的可靠性,或者說是否有阻礙完成這些功能的事件,即系統故障。在未來系統必將擁有高度的人工智能,那么如何滿足系統正常實現功能,預測、預防、控制和恢復系統故障是必須提前考慮的問題。
為研究該問題,將研究對象劃分為人系統、功能系統、人工智能系統故障分析系統及環境系統。人系統指正常的自然人。功能系統是人設計的,完成預定目的的系統。人工智能系統故障分析系統指人設計的,幫助人分析功能系統故障的,具有人工智能特征的,能代替人的系統,簡稱智能系統。環境系統指人系統、功能系統、智能系統所在的環境的總和。以智能系統為核心研究對象,論述人工智能系統故障的分析原理。
傳統的且現在主流的方法論是機械還原方法論,是一種機械唯物科學觀。認為復雜系統拆分后所得子系統的功能之和與原系統相同。認為個體與個體,個體與主體相互獨立,具有封閉性和確定性。但系統故障分析顯然不這么簡單。美國科學院院士,系統安全知名專家南希·萊文森教授[25-26]指出,目前系統故障分析方法得到的系統故障概率遠小于實際系統故障發生概率。他給出的原因是:子系統與子系統、子系統與系統之間的相互作用往往是意外的,不知情的。這導致系統設計時完全無法考慮這些聯系。即是作者想說明的使用傳統機械還原方論研究系統故障情況、演化過程及其結果難以適用的根本原因。這種方法論割裂了子系統之間的聯系,相反大多系統故障是子系統之間能量、信息、物質傳遞錯誤引起的。而這些錯誤在機械還原方法論中不能體現。
幸運的是鐘義信教授提出了信息生態方法論,其是辯證唯物科學觀,認為事物具有普遍聯系,個體與個體及主體有著相互作用,是開放的、具有生態演化的方法論。智能系統作為保障功能系統完成功能的控制系統,與其余系統的相互作用是一種普遍存在的聯系。智能系統作為主體,客體分為人系統、功能系統和環境系統。這種劃分也考慮到安全領域對研究對象的劃分,即人(人系統)、機(功能系統)、環(環境系統)和管(智能系統)。未來復雜系統中,智能系統必將成為整個系統的核心,將調解功能系統、環境系統與人系統的關系,如圖1 所示。

圖1 研究對象系統的劃分Fig.1 Division of research object system
文獻[9]指出,故障信息轉化定律可描述為本體論故障信息—認識論故障信息—故障知識—智能安全策略—智能安全行為。本體論故障信息指客體系統狀態及變化的方式,是客體系統本身表現出來的信息,即人系統、自然系統和功能系統給出的信息。認識論故障信息指主體系統能夠感知到的客體系統的本體論信息,是主體系統能接收的故障信息,即為智能系統接收的信息。故障知識指認識論故障信息由主體系統進行智能加工、分析和記憶,形成可處理客體系統故障的規則。智能安全策略指主體利用基礎故障意識、情感和理智綜合決策生成的智能策略,用于指導主體實施帶有減少故障目的智能安全行為。智能安全行為指主體根據智能策略對客體實施的帶有防止故障目的行為。智能系統要完成上述故障信息轉化,必須根據故障控制目標,且具備故障知識的前提下完成。文獻[27]給出了人工智能系統通用模型,提出了人工智能系統故障分析原理,如圖2 所示。
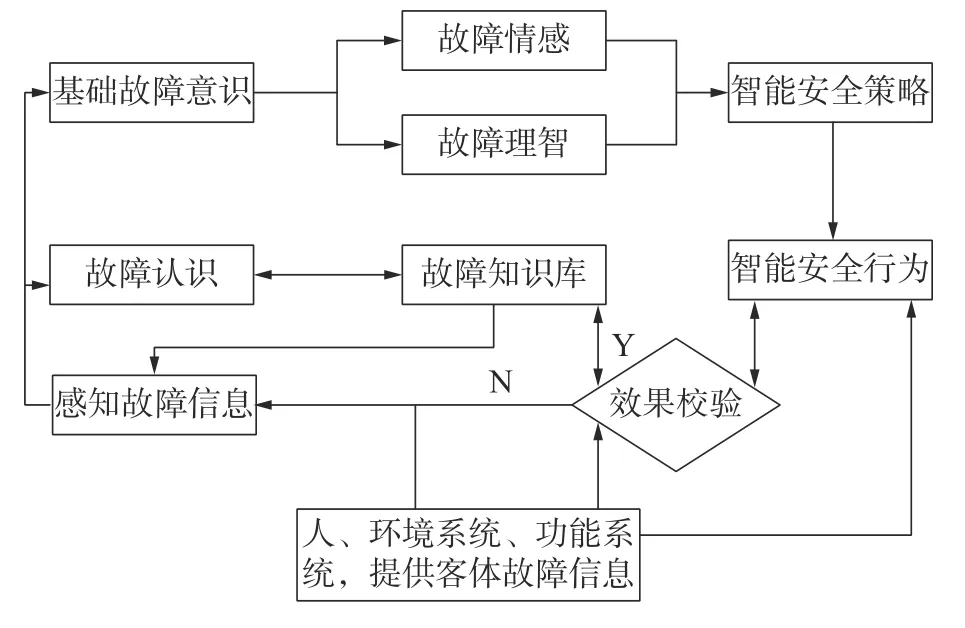
圖2 人工智能系統故障分析原理Fig.2 Fault analysis theory of artificial intelligence system
圖2 的思路鐘義信教授稱為信息轉化與智能創生[27],本文將其稱為故障信息轉化與智能故障分析,即故障分析原理。如果運用結構主義(如神經網絡)、功能主義(如專家系統)或者行為主義(感知系統)進行故障分析,那么形成的故障分析原理圖只是圖2 展示流程的一部分[27]。因為上述3 種主義都是機械還原方法論,割裂了子系統之間的關系,得到的故障分析原理圖是圖2 在某一方面的化簡。其結果并不完全,也不能適用于圖1 給出的系統結構劃分。
因此研究適應未來智能和數據環境下的人工智能系統故障分析原理,只能使用辯證的信息生態方法論。其具備了機械還原論對于各子系統的研究特點,即人系統、功能系統、環境系統、智能系統各自特征;也能夠辯證地討論各子系統之間的相互作用,即能量、信息、物質的相互傳遞。信息生態方法論滿足系統故障分析特點,適合于無人化、智能化、大規模、數據化的系統故障分析。
2 故障信息、故障知識和智能安全生成原理
根據信息生態方法論,系統故障分析所使用的智能系統的任務應為研究故障信息的整體變化過程,即本體論故障信息—認識論故障信息—故障知識—智能安全策略—智能安全行為的過程。進一步可簡化為信息—知識—智能[9],對應的3 個主要過程為故障信息生成、故障知識生成和智能安全生成。
2.1 故障信息生成原理
基于第1 節對主體(智能系統)和客體(人系統、功能系統和環境系統)的劃分給出定義1、2。
定義1客體故障信息:人系統、功能系統和環境系統狀態及其變化過程體現出的信息。
根據文獻[28],客體信息包括因素流和數據流。因素流為表征人系統、功能系統和環境系統的所有狀態類別的連續狀態。數據流是蘊含在因素流中,連續不斷的人系統、功能系統和環境系統的各因素狀態變化的數據。這兩個概念是筆者提出的空間故障樹理論的第四部分系統運動空間與系統映射論的研究成果。
系統運動空間認為人建立的人工智能系統是對自然系統(包括人工系統或自然系統)的無限功能接近,但無法達到[28]。期間自然系統與人工智能系統存在著對應關系。自然系統以數據流為先,智能系統接收數據流,進而歸類數據確定因素,形成因素流;智能系統改變因素流,進而對自然系統進行控制。由于科技水平的限制,智能系統無法辨識所有的數據流,現有手段也無法控制所有的因素流,智能系統只能模仿自然系統功能的一部分。因此因素流和數據流可表征客體系統(人系統、功能系統和環境系統)的存在,進而表征系統故障。
定義2感知故障信息:主體(智能系統)能夠感知的客體狀態及其變化過程中散發出來的因素流和數據流,包括故障信息的形式(語法信息)、內容(語義信息)和效用(語用信息)。
故障信息形式又稱為語法信息,包括因素流和數據流,描述故障過程變化和特征;故障信息效用又稱為語用信息,描述在具備故障信息形式時對應的故障變化情況;故障信息的內容稱為語義信息,代表了故障形式與故障效用的對應關系,即一種映射。文獻[28]中類似的研究稱為系統映射論,認為系統內部結構是因素流與數據流的對應關系。這種系統內部結構就是系統外部影響與系統目標的對應關系,對應于這里的語義信息。主體對于客體的認識是語法、語義和語用三位一體的認識。故障信息生成過程:客體發散出數據流給主體,主體分辨出因素流,因此主體感知到客體的存在,并由數據流和因素流形成故障信息形式;對應的在此情況下客體表現出主體設定目標的達成情況,形成故障信息效用;故障形式和效用組成了對應關系,形成了故障信息內容,即映射關系。這就生成了一條故障信息。故障信息經過處理將進一步形成常識故障知識、經驗故障知識和規范故障知識,加之本能故障知識就建立起了故障知識庫。
2.2 故障知識生成原理
將故障信息轉化為故障知識即為故障知識的生成原理。故障信息與故障知識是有區別的。故障信息是表面的,是客體變化過程中散發出的因素流和數據流。由于技術限制,故障信息往往是離散的、隨機性和模糊性,并伴隨著錯誤信息,是系統故障變化的表象。故障知識是在因素流與數據流基礎上得到的對應關系,可表征根本的系統故障變化過程。可對新出現的故障語法信息,在沒有語義情況下進行預測和判斷與語法對應的語用,從而采取應對措施。從故障信息到故障知識的生成過程主要通過歸納總結完成,形成故障知識后存入故障知識庫,如圖2 所示。
2.3 智能安全生成原理
智能安全包括智能安全策略和智能安全行為。鐘義信[27]指出,智能安全至少包括故障意識、故障情感和故障理智3 個概念層次。它們都涉及知識的獲取并做出對應的反應,但不同層級的知識和反應是不同的。
定義 3基礎故障意識[9]:根據主體本能故障知識和常識故障知識產生的基礎意識反應。
主體對客體故障的認識包括本能故障知識和常識故障知識:本能故障知識是主體自有的,不需要經驗積累形成的知識;常識故障知識是通過故障知識反復校驗客體系統得到的。則故障意識過程如式(1)所示:

式中:M代表從信息和知識到反應的映射;I代表主體對故障的語義信息;F為因素流;D為數據流;Kic表示本能故障知識和常識故障知識;G表示系統故障最少的目標;Ric表示基礎意識反應。
定義 4故障情感:主體根據本能故障知識、常識故障知識和經驗故障知識產生情感反應。
經驗故障知識可從故障語義信息(它是感知信息/認識論信息的代表)歸納得到。故障情感比基礎故障意識利用了更多的經驗故障知識,故障情感只在基礎故障意識之上才能發生。則故障情感過程如式(2)所示:

式中:Kice表示本能故障知識、常識故障知識和經驗故障知識;Rice表示情感反應。
定義 5故障理智:主體根據本能故障知識、常識故障知識、經驗故障知識和規范故障知識產生理智反應。
故障理智比基礎意識利用了更多的經驗故障知識和規范故障知識,故障理智只在基礎故障意識之上才能發生。則故障理智過程如式(3)所示:

式中:Kices表示本能故障知識、常識故障知識、經驗故障知識和規范故障知識;Rices表示理智反應。
3 4 種故障知識的獲得、特性與應用
由于研究的主體是智能系統,它本身是由人設計的,通常情況下獨立于人運行的,保證系統正常運行的智能故障分析控制系統。因此對于智能系統而言,使用故障意識、故障情感和故障理智是不恰當的。實際上鐘義信教授認為智能應該包括這3 層次。進一步地,它們基于本能故障知識、常識故障知識、經驗故障知識和規范故障知識,而智能系統獲得這些知識是可行的、合理的。
本能故障知識對智能系統最難理解但確是最易接受的知識。它包含了人對于系統故障過程的最基本觀點和看法。人可以將對系統故障的本能語義信息寫入智能系統的故障知識庫,作為智能系統最基本的反應規則,而不需要進一步處理和推理。由于上述特點,智能系統可利用本能故障知識最為快速地進行故障處理。
經驗故障知識往往來源于系統設計者知識的直接寫入,而系統運行后則來源于系統運行過程中的故障語義信息收集和寫入。經驗故障知識往往偏重于個體經驗,可體現功能系統在特定條件下獨有的故障語義信息,具有排他性。
規范故障知識是經過經驗故障知識在同類的不同個體(同類功能系統對應的智能系統)之間傳播,并經過智能系統驗證、修正、提煉和寫入故障知識庫的故障語義信息。具有一定范圍內的通識性。
常識故障知識是規范故障知識經過長期的、大量同類的不同個體驗證,并達成一直且有統一認識的故障語義信息。一旦確定一般不進行修改。
因此這4 種故障知識都可以通過主體(智能系統)對客體(功能系統和環境系統)的學習,或客體(人系統)直接授予主體完成。對實際系統的故障分析、預測和控制,智能系統可根據實際情況(故障信息語法)運用基礎故障意識、故障情感和故障理智和4 種故障知識進行應對。
基礎故障意識根據故障語義信息利用主體本能故障知識和常識故障知識進行主體反應。首先考慮本能故障知識,其代表了智能系統最基本的趨利避害的原則目標,且本能故障知識相對較少,可直接通過識別以最快的響應速度給客體提供支持。常識故障知識較本能故障知識更多,通過尋找匹配條件完成對客體的支持,更為具體,但效率降低。
故障情感根據本能故障知識、常識故障知識和經驗故障知識產生主體情感反應。本能故障知識和常識故障知識的處理與基礎故障意識相同。經驗故障知識往往是針對同一類故障的經驗。由于經驗本身具有一定的不確定性,智能系統可能會得到一些可選方案。作為主體的智能系統可根據客體的即時故障語法信息得到故障語義信息并采取行動,這是一種模糊決策過程,當然也可以使用其他方法。
故障理智根據本能故障知識、常識故障知識、經驗故障知識和規范故障知識產生主體理智反應。與故障情感的區別在于故障理智擁有規范故障知識。當故障問題在上述層面難以解決,可利用規范故障知識進行邏輯推理獲得主體理智反應。當問題更加困難時在規范故障知識基礎上運用智能方法加以分析,如深度學習、神經網絡等方法。
可見基礎故障意識、故障情感和故障理智可處理逐漸復雜的故障問題,但處理效率則是降低的,反應時間變慢。雖然本能故障知識、常識故障知識、規范故障知識和經驗故障知識對系統故障語義信息抽象的程度越來越低,但語義信息的數量則是增加的。
智能系統的核心任務是根據故障語義信息提供適合的智能安全行為保障系統完成預定功能。智能安全行為取決于智能安全策略。智能安全策略需要綜合考慮基礎故障意識、情感與理智。因此最終得到的人工智能系統故障分析原理可表述為基于信息生態方法論,考慮基礎故障意識、故障情感與故障理智,及即時故障語義信息的綜合安全決策與降低故障反應生成過程,目的是確保系統在規定條件下完成預定功能。
4 結束語
本文研究了利用信息生態方法論對系統故障進行智能分析處理的基本原理,主要結論:
1) 對系統的研究對象進行了劃分,針對未來系統特點將智能系統作為研究主體。認為研究適應未來智能和數據環境下的人工智能系統故障分析原理,只能使用辯證的信息生態方法論實現。
2) 結合信息生態方法論和系統運動空間及系統映射論,提出了故障信息、故障知識和智能安全生成原理。它們涉及了本能故障知識、常識故障知識、經驗故障知識、規范故障知識、故障語義信息的因素流和數據流,以及系統故障最少的目標。
3) 研究了4 種故障知識的獲得和特性,及基礎故障意識、故障情感和故障理智的特點和應用。認為人工智能系統故障分析原理是基于信息生態方法論,考慮了基礎故障意識、故障情感與故障理智,及故障語義信息的綜合安全決策與降低故障反應生成過程,目的是確保系統在規定條件下完成預定功能。
猜你喜歡
南大法學(2021年3期)2021-08-13 09:22:32
國際漢學(2020年1期)2020-05-21 07:23:52
法律方法(2019年4期)2019-11-16 01:07:02
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
法律方法(2018年2期)2018-07-13 03:22:02
軍事運籌與系統工程(2018年4期)2018-03-26 06:37:58
小康(2017年16期)2017-06-07 09:00:59
南風窗(2016年19期)2016-09-21 16:51:29
自然與文化遺產研究(2016年2期)2016-05-17 05:53:59
