啟帆工業機器人管線包設計與應用
2021-09-10 07:22:44李偉華王偉李興和楊林鄭勇山
機電工程技術 2021年2期
李偉華 王偉 李興和 楊林 鄭勇山








關鍵詞:工業機器人;管線包;線束;電纜
0引言
隨著工業機器人應用范圍的快速擴張,對機器人自身的技術要求也越來越高,比如電纜和氣管。由于工業機器人運動的復雜性、使用的特殊性以及環境要求越來越苛刻,對電纜和氣管提出了更高的要求,比如環保、阻燃、耐油、耐高低溫、耐扭曲、高柔軟、高耐磨、抗干擾等。電纜和氣管是工業機器人的“血管”和“神經”,一旦電纜和氣管出現故障,工業機器人就無法正常工作,這不僅會對客戶造成經濟損失,而且損害公司良好形象和聲譽,同時故障維修的難度和成本相當高。合理的電纜和氣管選型、布置,不僅能大幅減少故障問題,還可大幅縮短安裝和維修工時,提高生產和維修效率。因此,本文引入了管線包的基本概念及作用,并介紹了啟帆工業機器人管線包設計過程與應用情況,為工業機器人管線設計提供了指導和參考。
1管線包基本概念及作用
圖1所示為啟帆某機器人設計模型與實物照片。工業機器人管線包是為了保護電纜、氣管等設計和制作的成套線束方案和產品,可明顯減少電纜和氣管等磨損、老化,延長使用壽命,更不會阻礙和限制機器人運動軌跡和范圍,還可以減少電纜和氣管所承受的彎曲和扭轉力。管線包設計主要包括零配件選型、線路布置、長度確定以及模塊化制作和便捷安裝等。
管線包合理的零配件選型和獨特的布局設計,即使在極端的彎曲情況下,也能始終保持管線良好的形態和抗壓性能,不會對管線零配件造成特別的擠壓,為管線提供有效保護。管線包制作和安裝具有模塊化特點,可提前根據機器人結構和運動范圍設計好管線包方案,提前制作好管線包,不用等到現場下料、焊接、邊裝機邊布線等,而管線包的安裝更加方便快捷,就如同給機器人穿衣服一樣,只需按照預留的安裝孔位固定好即可。
2管線包設計過程
管線包設計主要分為物料選型和布置方案兩部分,其中物料選型主要有電纜、連接器、氣管、氣管接頭、輔助配件等;而布置方案主要有線束的長度、固定點、保護措施、模塊化制作和安裝等。這兩部分內容是相互影響的。
2.1管線包選型
這里主要介紹管線包電纜、波紋管、氣管等基本的常用的物料與選型。
2.1.1電纜
工業機器人通常采用伺服電機,該電機通常有2處接頭,其中一處是動力線(有的電機將制動器接線獨立出來,因此有3處接頭),一處是編碼器。以某伺服電機舉例說明,如圖2所示。
動力線由3根相線、1根地線、1對制動器線構成,制動器線為一雙絞線,如圖3所示。啟帆采用增量式編碼器,接頭針腳數為7個,其中6個是傳遞3對信號,剩余1個是屏蔽信號。由于信號線纜含有屏蔽層,因此編碼器線只需3對雙絞線,如圖4所示。線芯規格均可參考電機說明書。
管線包動力線和編碼器線均是機器人專用柔性電纜,應能滿足機器人運動時高頻次、長時間的彎曲和扭轉。機器人用電纜需要進行彎曲和扭轉壽命測試(可查閱相關廠家產品說明書)。啟帆機器人管線包采用某日本品牌FLEX系列電纜,其彎曲和扭轉測試數據如表1所示。
2.1.2波紋管
管線包波紋管有以下作用:(1)減少電纜與機器人本體或其他物體的摩擦、刮蹭、劃傷等,同時波紋管內壁光滑,對電纜幾乎無磨損;(2)電纜比較柔軟,無法靠自身形成拱形支撐,而波紋管有較好的韌性,可以較大跨度和高度地支撐起電纜,如圖5所示;(3)波紋管將多個電纜集合起來,減少機器人本體電纜的密集感,線路清晰、簡潔、美觀,如圖1所示。
波紋管有多種材質,比如金屬、塑料、復合編織材料等,根據不用的需要進行選擇。通常波紋管采用塑料,主要是尼龍,其性能也是大相徑庭。不能將一般用途的波紋管用于機器人管線包,因為一般用途的波紋管滿足不了機器人高頻次、長時間的彎曲和扭轉而斷裂,如圖6所示。管線包波紋管跟電纜一樣,不僅要做常規項目測試(比如自熄滅性、高溫老化、抗拉伸、抗壓、抗沖擊等),還需要做彎曲性能測試(包括低溫彎曲),上述相關測試可查看廠家產品說明書。啟帆前期采用某德國品牌波紋管,由于價格昂貴和交期較長,現引進一廣州國產品牌,兩者規格參數如表2所示。單波紋管是無法使用的,需要配合接頭、固定座等附件一起使用。
2.1.3氣管
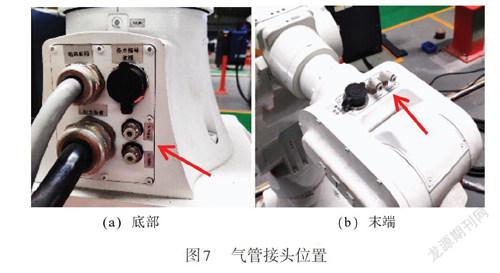
工業機器人本體末端通常采用氣動裝置,通過吸盤吸附板料,實現取料、上料、取件等動作。通常氣管布置和安裝不好,很容易就掙脫、甩出、損壞等。啟帆將氣管和本體電纜一起做到管線包,氣管從機器人本體底部引入,如圖7(a)所示,一直到本體末端,如圖7(b)所示,而客戶只需要安裝好本體前端的氣動裝置,接上本體末端和底部的氣管接頭即可,工作難度和工時大大減少,方便快捷。
氣管選型主要是氣管規格和氣管根數,看客戶的具體使用要求,也可參考機器人制造商的推薦。啟帆管線包氣管規格有外徑Φ6mm、Φ8mm、Φ10mm、Φ12mm5種,氣管根數通常是1~2根。管線包氣管同樣要考慮彎曲特性,如彎曲半徑過小會導致氣管彎折、憋氣,甚至破裂。表3所示為某日本品牌氣管最小彎曲半徑數據。
2.2管線包布置
機器人本體結構設計完成且管線包物料選型大體確定后才開始做管線包布置方案。啟帆管線包布置方案是在SolidWorks三維平臺基于機器人本體模型來設計的,如圖1(a)所示。
2.2.1確定線束大體走向
通常有內置線束和外置線束,其中內置線束在機器人本體內部,多采用中空結構,且管線包安裝較復雜;外置線束在本體外部,只需在本體預留固定安裝孔位,管線包安裝方便快捷。啟帆管線包,如圖1中MR機器人底座、一二軸座和主臂段采取的外置線束,而副臂、末端手腕以及某些小型機如圖7(b)所示則采用內置線束。
2.2.2確定管線包安裝固定點
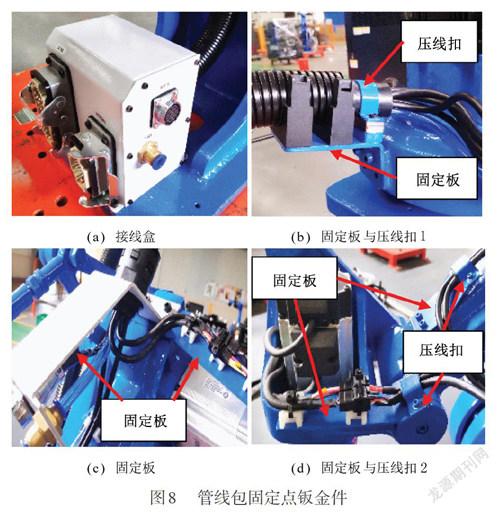
安裝固定點自下而上設置,從機器人本體底座一直到末端,通常每隔一定距離要設置一固定點,用于固定或支撐管線包。固定點通常是鈑金件,比如接線盒、壓線扣、固定板等,如圖8所示。設置固定點時,機器人本體各軸是處于零位狀態。
2.2.3敷設管線包線束
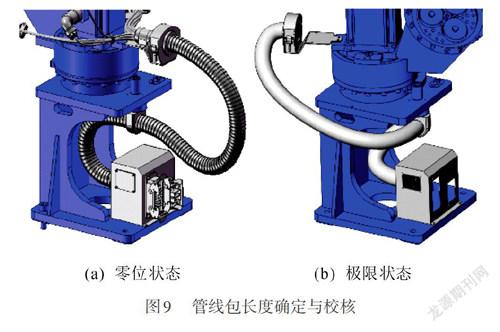
采用SolidWorks中3D草圖繪制樣條曲線,適當調整樣條曲線,盡可能平滑、柔順,且貼近實物狀態,通過掃描完成線束敷設。線束應預留一定的余量即彎曲的跨度、高度等,但不要預留過多,過多會使得管線包線束碰到機器人本體,造成碰撞、磨損等。在零位狀態布置好線束后,如圖9(a)所示,可量取各段線束長度,該長度值還需要在極限位進行校驗,如圖9(b)所示。在極限位時,管線包線束彎曲或扭曲程度是最大的,注意核實彎曲半徑是否有超出產品的使用范圍。
2.2.4拆取管線包組件并出線束圖
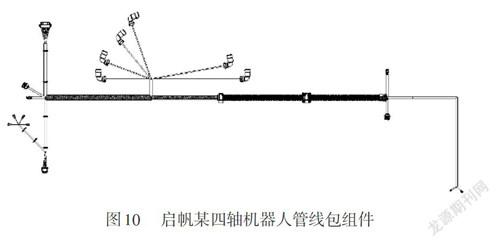
圖1(a)所示為啟帆某機型人管線包設計完成的模型。拆取管線包組件,使管線包模塊化,可單獨提前制作好,不用跟機器人本體制作混雜在一起。啟帆某四軸機器人管線包組件模型如圖10所示。如要生產制作管線包,還需要拆裝配圖,分成單獨的線束圖。啟帆將管線包線束拆分成動力線束、編碼線束、備用線與氣管線束3部分,圖11所示為啟帆某四軸機器人管線包線束。
2.2.5管線包線束與接頭固定方式
波紋管固定比較簡單,選用配套的接頭和固定座就可以,但線束和接頭的固定需要注意。通常1kW及以上電機采用圓形接頭,如圖2所示,通過卡扣和螺紋擰緊固定,而1kW以下電機多采用快插接頭,每個廠家規格不一,不利于管線包的批量制作,因此啟帆通常將電機原快速接頭剪掉,管線包和電機分別統一安裝上某一外國品牌的快插接頭,如圖8(d)所示。
快插接頭和電纜如果不固定,機器人運動時,電纜會甩動,接頭很容易松脫。電纜可采用壓線扣固定如圖8(b)與圖8(d)所示,也可采用扎帶將其固定在固定座上,如圖8(c)~(d)所示,但電纜在固定前,一定要包裹膠皮,如圖8(b)所示,確保電纜壓緊。快插接頭通常采取三點固定法,如圖8(c)~(d)所示,其中快插接頭為中間點,兩邊線束為前后點,該三點均要固定牢固。啟帆通常采用扎帶將電纜和接頭扎緊在固定座上。
3管線包應用
目前管線包已經全面應用于啟帆關節機器人,圖1(b)所示為啟帆MR6機器人管線包安裝完畢照片,圖7所示為啟帆SRE7機器人照片(管線包內置),圖12所示為啟帆其他機器人管線包安裝完畢照片。啟帆自2018年5月取消現場散件布線(邊安裝機器人本體邊布線),引入和設計全新管線包,以及合理的選型與布局,使得布線效率相比之前提高了3倍,管線故障率下降了90%。目前還未收到任何關于電纜和氣管磨損、斷裂等質量投訴,同時機器人外觀更加簡潔、美觀。
4結束語
本文針對當前工業機器人電纜和氣管使用要求越來越高、布線生產效率低、管線故障頻發等問題,啟帆引進了管線包概念和技術,采取合理的選型與科學的布局設計,取得了良好的應用效果,使用壽命大幅延長、生產效率大幅提高、故障大幅度減少,為今后機器人布線設計提供了重要指導和參考。
