基于雅克比矩陣的并聯機器人運動學性能分析
2021-09-10 07:22:44劉芳芳譚偉浩
內燃機與配件 2021年7期
劉芳芳 譚偉浩

摘要:基于雅克比矩陣的機構運動特分析對于并聯機構的設計具有重要指導意義。本文主要介紹3-UPS/RRR并聯機構的運動特性,首先建立機構的雅克比矩陣,利用雅克比矩陣建立機構的可操作度指標,其次借助可操作度指標對在不同姿態下的機構可操作度進行評估。通過MATLAB仿真結果表明,該機構具有良好的可操作性能。
Abstract: The kinematic characteristic analysis based on Jacobian matrix is very important for the design of parallel mechanism. This paper mainly introduces the kinematic characteristics of 3-UPS / RRR parallel mechanism. Firstly, the Jacobian matrix of the mechanism is established, and then the operability index of the mechanism is established by using the Jacobian matrix. Secondly, the operability of the mechanism in different attitude is evaluated by the operability index. Matlab simulation results show that the mechanism has good operability.
關鍵詞:雅克比矩陣;并聯機構;可操作度
Key words: Jacobian matrix;parallel mechanism;operability
中圖分類號:TH16 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-957X(2021)07-0069-02
0 ?引言
隨著現代信息科技與娛樂業的融合,虛擬現實技術的出現以及電機傳動技術的成熟應用,使得人們對于多自由度模擬裝置的體驗需求越來越多[1]。并聯機構憑借其高剛度、高精度以及動態特性好等突出優勢在各領域都得到廣泛應用,現有的大部分模擬裝置都是6自由度Stewart并聯機構的原型,本文提出了一種將3-UPS/RRR三自由度并聯機構應用在賽車模擬駕駛當中的研究分析。但由于并聯機構綜合性強,為了保證機構具有良好的運動性能,在研究之前時,需要對機構的運動學特性進行分析。因此,本文利用雅克比矩陣對機構的運動學特性進行分析研究,其中包含機構的可操作性及靈巧度。可操作度及靈巧度分別用于衡量機構的輸出動平臺在位姿方面的操作性能,以及評價機構的靈活性能[2]。本文以3-UPS/RRR三自由度并聯機構為例,借助螺旋理論建立該機構的雅克比矩陣;利用姿態可操作度衡量機構的靈活性,并在此基礎上,利用MATLAB軟件對不同位姿下機構的可操作度進行仿真分析。此項研究為后續機構的運動學軌跡規劃及控制、動力學仿真及控制等研究奠定基礎。
1 ?機構簡介
3-UPS/RRR并聯機構是一種具有三個轉動自由度的并聯機構,該機構由動平臺、定平臺、三條空間均置的驅動支鏈以及一條恰從動約束支鏈組成。三條驅動分支UPS結構完全相同,約束支鏈RRR限制動平臺只能繞固定點P旋轉。機構簡圖如圖1所示。
2 ?速度雅克比矩陣
速度雅可比矩陣是機構輸入輸出構件間的速度比例矩陣,對并聯機構奇異性分析與尺度綜合奠定基礎[3]。以下將借助螺旋理論,推導并聯機構3-UPS/RRR的速度雅可比矩陣。該方法的優點在于雅克比矩陣的求解不依賴于位置反解。
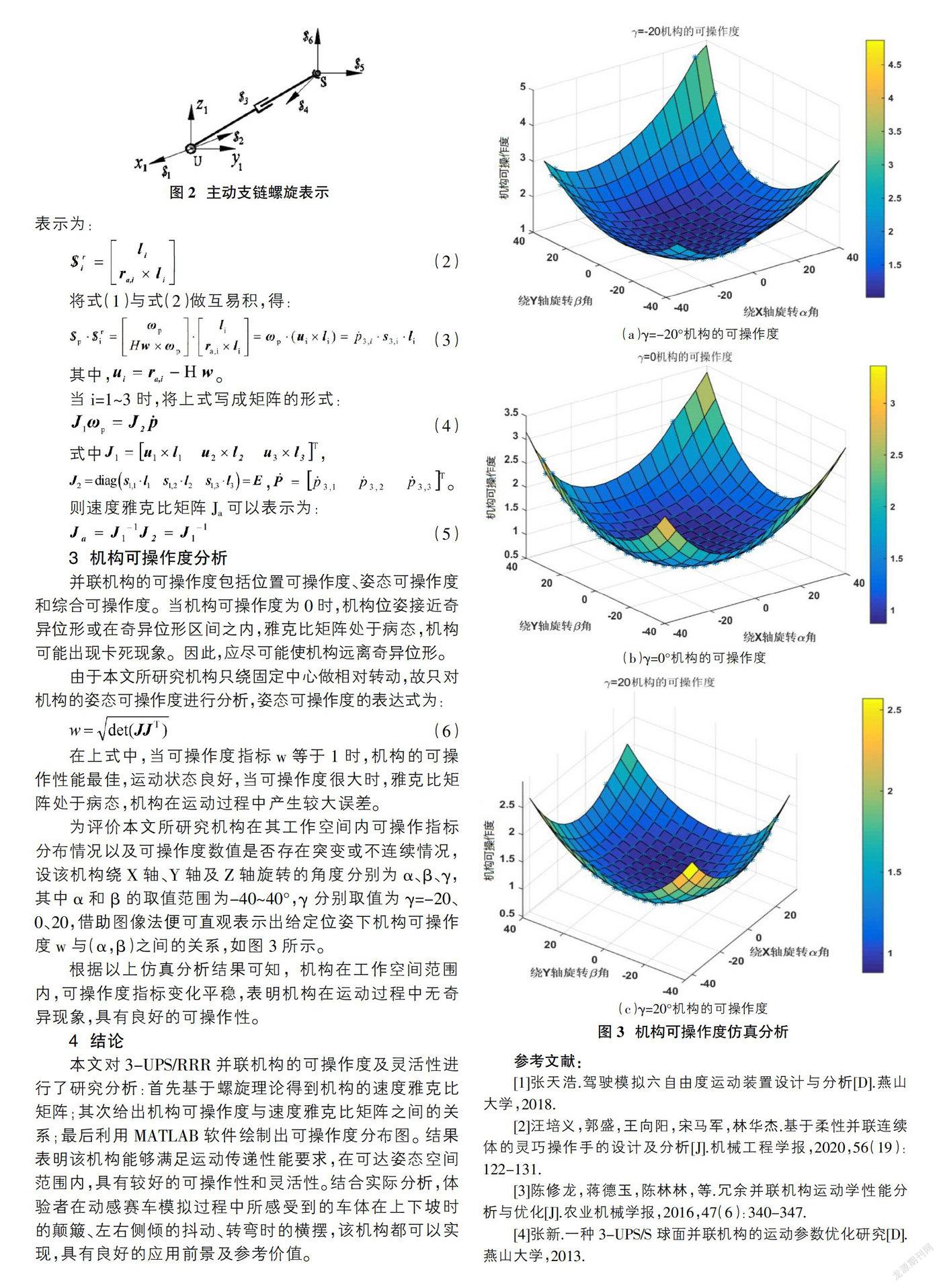
在機構簡圖1中,選定瞬時參考坐標系O-XYZ。選取其中一條UPS開環支鏈,支鏈螺旋表示如圖2所示。該支鏈可以看成由6個轉動副串聯而成的開環支鏈,通過三條相同的UPS支鏈將上下平臺連接起來,由于并聯機構的瞬時速度可以表示為各支鏈瞬時螺旋運動的線性疊加,則該機構的動平臺運動的瞬時速度旋量[3]可表示為:
3 ?機構可操作度分析
并聯機構的可操作度包括位置可操作度、姿態可操作度和綜合可操作度。當機構可操作度為0時,機構位姿接近奇異位形或在奇異位形區間之內,雅克比矩陣處于病態,機構可能出現卡死現象。因此,應盡可能使機構遠離奇異位形。
由于本文所研究機構只繞固定中心做相對轉動,故只對機構的姿態可操作度進行分析,姿態可操作度的表達式為:
在上式中,當可操作度指標w等于1時,機構的可操作性能最佳,運動狀態良好,當可操作度很大時,雅克比矩陣處于病態,機構在運動過程中產生較大誤差。
為評價本文所研究機構在其工作空間內可操作指標分布情況以及可操作度數值是否存在突變或不連續情況,設該機構繞X軸、Y軸及Z軸旋轉的角度分別為α、β、γ,其中α和β的取值范圍為-40~40°,γ分別取值為γ=-20、0、20,借助圖像法便可直觀表示出給定位姿下機構可操作度w與(α,β)之間的關系,如圖3所示。
根據以上仿真分析結果可知,機構在工作空間范圍內,可操作度指標變化平穩,表明機構在運動過程中無奇異現象,具有良好的可操作性。
4 ?結論
本文對3-UPS/RRR并聯機構的可操作度及靈活性進行了研究分析:首先基于螺旋理論得到機構的速度雅克比矩陣;其次給出機構可操作度與速度雅克比矩陣之間的關系;最后利用MATLAB軟件繪制出可操作度分布圖。結果表明該機構能夠滿足運動傳遞性能要求,在可達姿態空間范圍內,具有較好的可操作性和靈活性。結合實際分析,體驗者在動感賽車模擬過程中所感受到的車體在上下坡時的顛簸、左右側傾的抖動、轉彎時的橫擺,該機構都可以實現,具有良好的應用前景及參考價值。
參考文獻:
[1]張天浩.駕駛模擬六自由度運動裝置設計與分析[D].燕山大學,2018.
[2]汪培義,郭盛,王向陽,宋馬軍,林華杰.基于柔性并聯連續體的靈巧操作手的設計及分析[J].機械工程學報,2020,56(19):122-131.
[3]陳修龍,蔣德玉,陳林林,等.冗余并聯機構運動學性能分析與優化[J].農業機械學報,2016,47(6):340-347.
[4]張新.一種3-UPS/S球面并聯機構的運動參數優化研究[D].燕山大學,2013.