海洋溫差能供電水下滑翔機的液電轉換過程建模與效率分析
2021-09-10 08:14:20王國暉楊亞楠王延輝王樹新
水下無人系統學報 2021年4期
王國暉,楊亞楠,2*,王延輝,2,王樹新,2
海洋溫差能供電水下滑翔機的液電轉換過程建模與效率分析
王國暉1,楊亞楠1,2*,王延輝1,2,王樹新1,2
(1. 天津大學 機械工程學院,天津,300072; 2. 青島海洋科學與技術國家試驗室 海洋觀測與探測聯合試驗室,山東 青島,266237)
海洋溫差能供電是提高水下滑翔機的續航里程和在位工作時長的有效技術手段。其能量傳遞路徑的優化與能量轉化效率提升對于保證水下滑翔機正常工作至關重要。基于水下滑翔機海洋溫差能供電系統中機械能-電能轉換過程的能量轉換機理與損耗機理,建立了液壓馬達以及發電機等關鍵器件的參數化能量平衡方程、機械能-電能轉換模型以及轉換效率計算公式,開展了能量轉換過程的效率分析。通過平臺試驗與模型求解結果對比可知,壓力能-動能、動能-電能的能量轉化效率的相對誤差較小,分別僅為6.37%、5.12%。驗證了模型的準確性。在此基礎上,通過對模型的效率分析,對海洋溫差能供電系統進行了優化設計與試制。在后續的海試試驗中,試驗樣機可以收集6701 J的電能,壓力能-電能轉化過程的能量轉化效率可達38.86%,驗證了系統的有效性。
水下滑翔機; 海洋溫差能; 液電轉換; 轉換效率
0 引言
人類目前對海洋的探索僅有5%左右,尚有95%的海洋尤其是深遠海區域是未知的[1]。對海洋的科學認知程度取決于海洋觀測裝備的技術水平,提高海洋認知能力,走向深遠海必須裝備先行[2]。
水下滑翔機有別于采用螺旋槳推進的無人水下航行器,其通過改變自身浮力實現往復剖面的升沉運動,具有能耗水平低、效費比高、自持力強等優勢,是開展大范圍、長時序自主觀測的重要工具[3-4]。當前,我國“走向深藍”重大部署的實施對國產水下滑翔機的續航力與自持力提出了更高要求。而商用水下滑翔機一般依靠自身攜帶的電池獲得能量補充,因攜帶的電池能量有限,其續航能力、自持力受到制約,無法滿足未來深遠海長期在位任務的需求。現有國產水下滑翔機的續航力、自持力水平與未來5~10年長期在位觀測需求存在顯著差距。
利用外界海洋環境能源是破解水下滑翔機長期能源供給問題、提升其續航力與自持力的潛在技術途徑之一,對提高水下滑翔機的“能量自給”水平具有重要價值。自上世紀90年代起,基于固-液相變的海洋溫差能利用技術開始被廣泛采用[5]。水下滑翔機在往復穿越冷、熱水層過程中利用固-液相變材料(phase change material,PCM)周期性熱脹冷縮特性實現熱能-液壓能轉化,液壓能經蓄能器與液壓馬達-發電機組件(或外油囊),實現水下滑翔機溫差發電(或溫差浮力驅動)[6-7]。海洋溫差能是海洋表層溫水與深層冷水溫度差之間存在的熱能,具有穩定性強、晝夜波動小、不受氣象與海況因素影響、只稍隨季節性變化的特點[8],此外俘獲海洋溫差能的熱交換過程與水下滑翔機剖面航行過程同步進行,因此該技術適于為采用往復剖面形式運動的水下滑翔機提供能量補給。
針對海洋溫差能固-液相變、收集、轉換的能量過程的研究不斷深入: Kong等[9-10]基于焓法模型并采用液相分數場與溫度場解耦的方法建立了相變傳熱數學模型,基于相變液相分數場分布提出了固-液相變體積變化量計算方法; 田振華等[11]建立了海洋溫差能固-液相變液壓轉化系統的數學模型,對液壓系統的初選部件開展了仿真計算,驗證了設計方案的正確性; Wang等[12]基于熱力學方法建立了溫差能相變驅動循環過程數學模型,得出循環過程理論極限熱效率; 此外,Wang等[13]還建立了溫差相變發電過程的熱-機械耦合模型,實現相變材料與液壓機械系統的關聯,研究了系統油壓與輸出效率、單位輸出能量的關系,發現了蓄能器對提升系統性能有重要作用。
綜上所述,海洋溫差能利用過程是包含了熱相變、熱能-壓力能、壓力能-電能多個能量轉換階段,涉及眾多器件及特征參數的復雜過程。由于海洋溫差能固-液相變輸出油液體積有限,導致發電時長短暫、發電扭矩小以及器件參數耦合等現象存在,而針對液壓能-電能的液電轉換過程研究尚未深入,對影響液電轉換效率的關鍵因素也未有清晰認識。文中針對水下滑翔機海洋溫差能供電系統的液電轉換過程開展建模與效率分析,研究成果可為水下滑翔機溫差能供電系統研制提供依據。
1 液電轉換過程建模
海洋溫差能供電系統組成及工作原理如圖1所示,其組成主要包括: 1-相變材料; 2-換熱管; 3-電磁閥; 4-蓄能器; 5-發電機; 6-液壓馬達; 7-蓄電池; 8-皮囊(油液充滿為膨脹狀態,如圖1(a),(d)所示; 無液壓油時為收縮狀態,如圖1(b),(c)所示)。
初始狀態如圖1(a)所示,溫差能供電系統漂浮在海面上,皮囊內保持有最大油量。當滑翔機下潛至深海時,由于海水溫度較低,換熱管內的相變材料凝固收縮,皮囊內液壓油逐漸流向換熱管,如圖1(b)所示。而后,隨著供電系統上浮至海洋表面,由于海水溫度較高,換熱管內的相變材料融化膨脹,并將換熱管內的液壓油注入蓄能器中進行存儲。在這個過程中,蓄能器的壓力不斷上升,當蓄能器的壓力達到其設定的最大壓力時,電磁閥開啟,蓄能器中的液壓油經液壓馬達流入皮囊之中。與此同時,液壓馬達在液壓油的作用下帶動發電機旋轉進而產生電能,并經整流電路存儲于蓄電池中,如圖1(c)和圖1(d)所示。
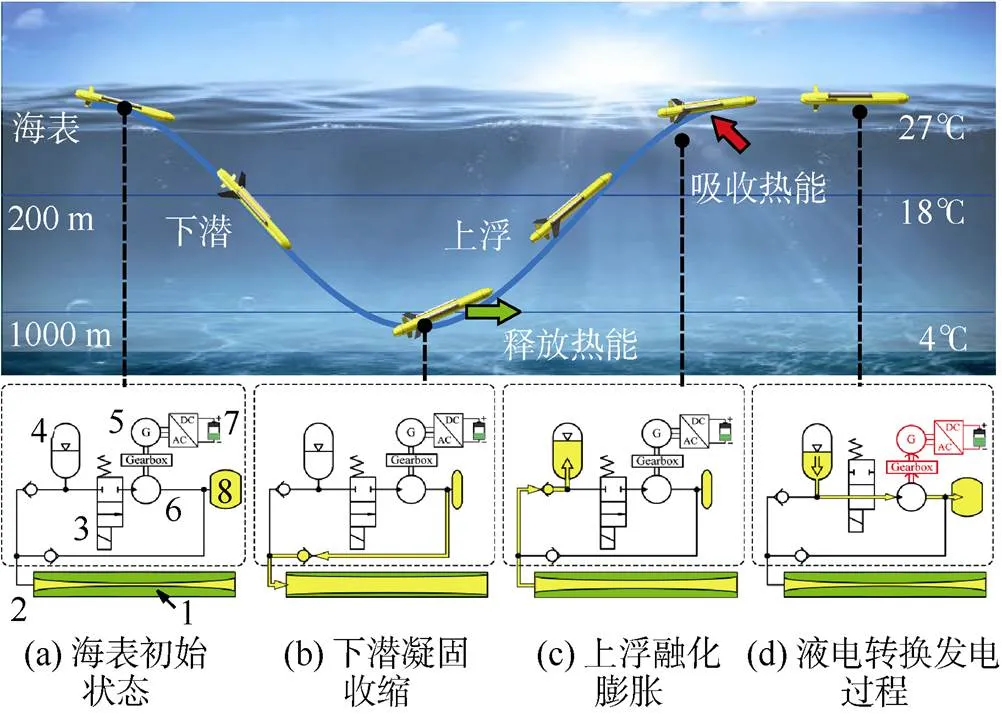
圖1 海洋溫差能供電水下滑翔機工作原理
由上述海洋溫差能供電系統工作過程分析可知,液電轉換過程涉及了壓力能(初始蓄能器內存儲)—動能(液壓馬達)—動能(變速器)—動能(發電機)—電能(發電機輸出)多個步驟,其中液壓馬達、發電機完成了能量形式的轉變,在能量形式轉變過程中既獲得有用能量,同時伴隨著多種形式的能量損耗與流失。文中基于液壓馬達以及發電機的工作原理,研究能量轉換與損耗機理,揭示出不同形式能量間實現轉換的機制。
1.1 液壓馬達效率模型
液壓馬達作為將壓力能轉化為機械動能的核心組件,其性能的好壞直接影響著海洋溫差能供電系統的能量轉化效率。能量轉化效率可以分為容積效率和機械效率,容積效率為
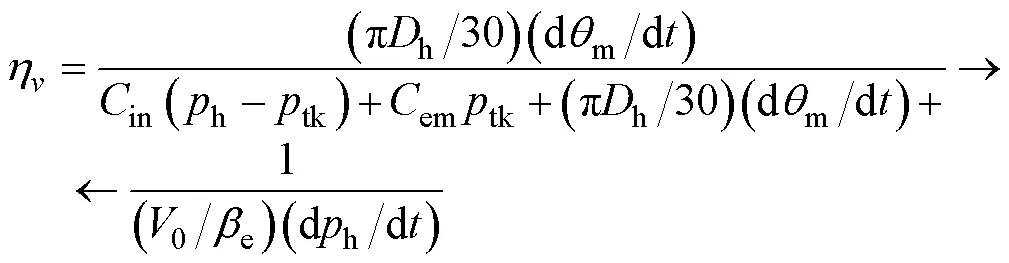
式中:h為液壓馬達的排量;m為液壓馬達的轉動角度;in為內泄露系數;em為外泄露系數;h為液壓馬達的進油口壓強;tk為液壓馬達的泄油口壓強;e為有效體積彈性模量;0為蓄能器充氣壓力時對應的氣囊體積。
由式(1)可知,在馬達結構參數確定的條件下,液壓馬達容積效率與工作壓力、液壓馬達轉速以及彈性模量等有關。
由液壓馬達和負載之間的力矩平衡方程可以推出液壓馬達的機械效率

式中:t為液壓馬達和負載折算到液壓馬達軸上的總慣量;m為黏性阻尼系數;為彈性阻尼系數; 由式(2)可以看出,液壓馬達機械損耗主要與液壓馬達兩端壓差、液壓馬達轉速相關。
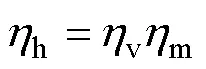
根據式(1)和式(2)可知液壓馬達的效率
1.2 發電機效率模型
發電機是將機械動能轉化為可存儲電能的核心組件。永磁無刷直流發電機因其功率密度大、體積小、效率高等優點,廣泛應用于風力發電系統、能量回收系統等。發電機的效率為
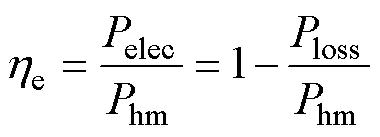
式中,hm為發電機輸入的機械功率,也為液壓馬達的輸出功率。根據液壓馬達液壓功率的定義可知,液壓馬達的輸出功率為
發電機運轉過程中的損耗主要包括銅損、鐵損、磁滯損耗以及雜散損耗4部分。其中,銅損和鐵損是電機運轉過程中的主要損耗,約占總體損耗的80%左右。一般情況下,采用等效電路的方式對電機效率進行分析[15]。其在0坐標系下的發電機等效電路如圖2所示。
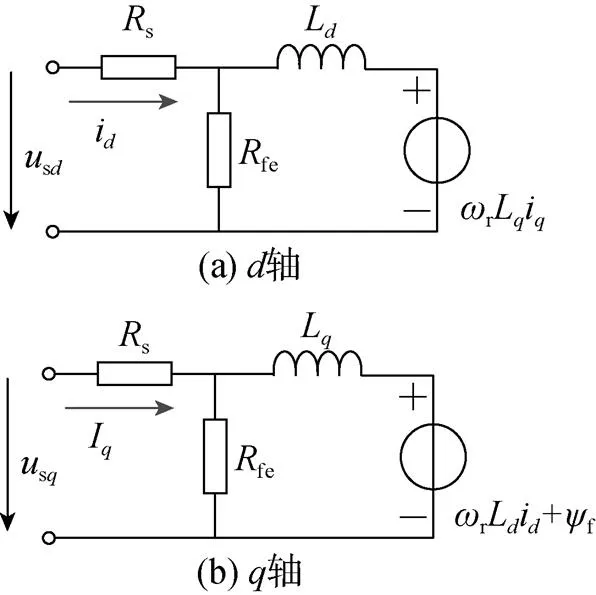
圖2 發電機等效電路模型
對上述等效電路進行分析,可以得到發電機的銅損cu和鐵損fe分別為
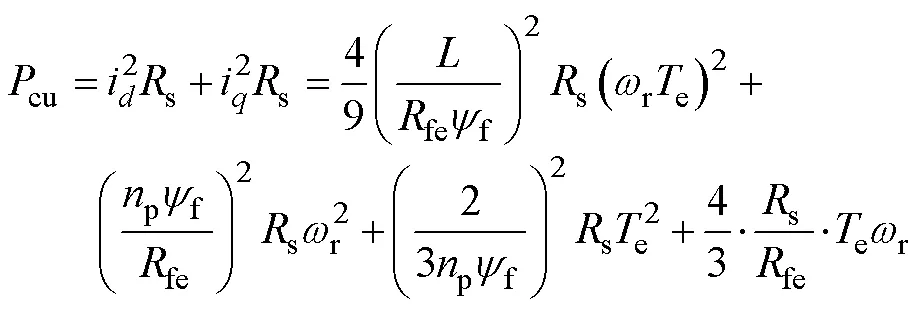
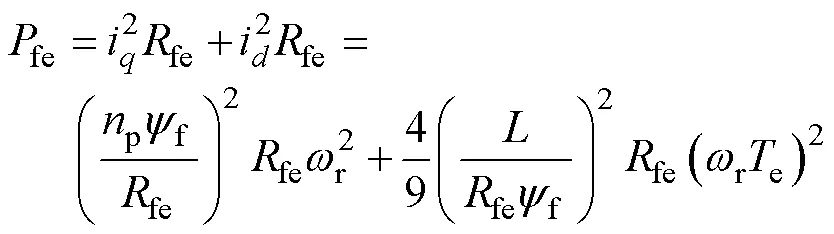
式中:為軸電流;為軸電流;L為軸電感;L為軸電感;fe為發電機的等效鐵阻;s為發電機的等效內阻;f為基波磁鏈;r為轉子機械角速度;e為發電機的電磁力矩;p為發電機的極對數。
故總損耗
將式(5)~式(8)代入式(4),則可得發電機的效率模型
利用式(3)和式(9)系統的液電轉化效率
2 模型驗證與液電轉換過程效率分析
2.1 模型驗證
文中采用海洋溫差能供電系統室內測試裝置開展液電轉換過程模型與效率計算公式的驗證。如圖3和圖4所示,室內測試裝置包括換熱單元、液壓單元、傳動單元、儲電單元和數據采集器,其中換熱單元由冷熱交換機、恒溫水槽、溫度傳感器及固-液相變換熱器組成; 液壓單元由單向閥、蓄能器、壓力傳感器、電磁閥、可調節流閥、液壓馬達、調壓閥、液位傳感器、油箱及各液壓器件之間的液壓管組成; 傳動單元由聯軸器、速度傳感器、扭矩傳感器、減速器及發電機組成; 儲電單元由整流橋模塊、蓄電池、電流傳感器及電壓傳感器組成。相關元器件參數如表1所示。
在試驗中,分別由壓力傳感器記錄蓄能器壓力值h; 電流傳感器記錄充電電流charge; 電壓傳感器記錄充電電壓charge; 紅外線速度傳感器記錄發電機軸轉速h; 扭矩傳感器記錄液壓馬達輸出軸扭矩h; 油箱的液位傳感器記錄液壓油外泄量out。此外,液壓油內泄量leak由液壓馬達旁通口的試管記錄,發電時長由數據采集器生成。
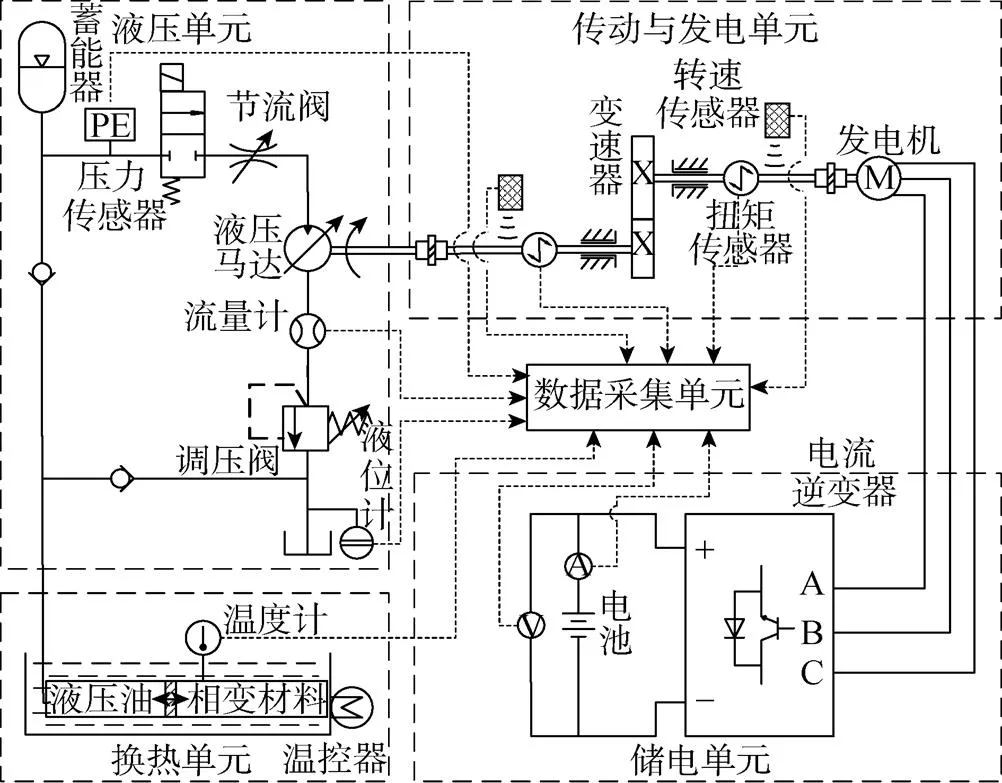
圖3 海洋溫差能供電系統室內模擬測試裝置構成示意圖
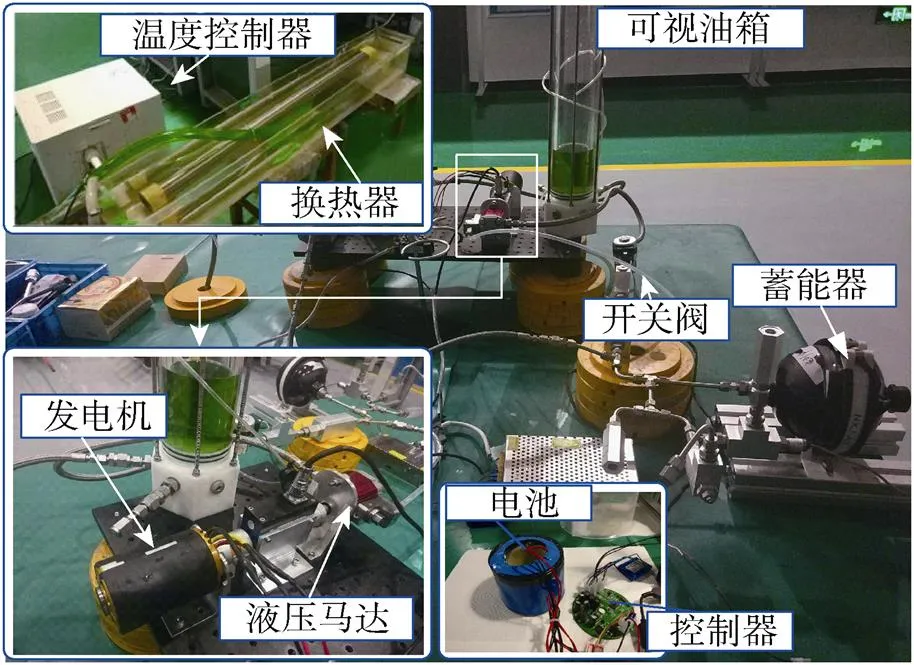
圖4 海洋溫差能供電系統室內模擬測試裝置
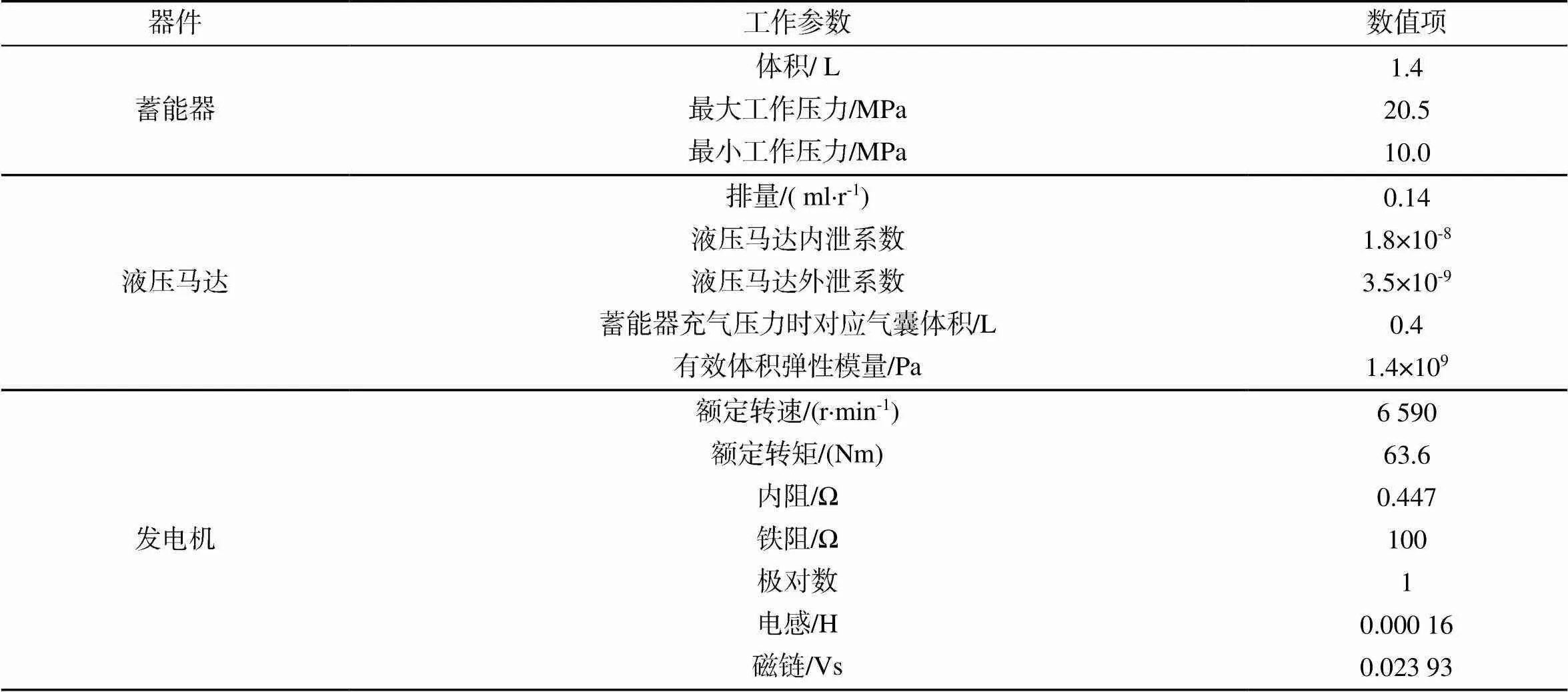
表1 相關元器件參數列表
為與溫差能-電能轉化效率模型的計算結果進行對比,對試驗測試平臺各能量轉化過程中的試驗效率及全過程能量轉化效率定義如下
式中:h_Exp為試驗測定的液壓馬達效率;e_Exp為試驗測定的發電機效率;k為液壓馬達輸出的機械功率;h為輸入液壓馬達的液壓功率;e為發電機的輸出電功率。
為了驗證液壓系統模型的準確性,選取了10個工作點對液壓馬達的總效率進行了試驗測定和仿真分析,結果如圖5所示。其中代表了仿真值與實驗值的相對誤差。測定點的壓力和轉速值如表2所示。由圖可知,仿真值和試驗測定值之間的吻合度較高,相對誤差較小,平均誤差僅為6.37%,證明了液壓馬達效率模型的準確性。
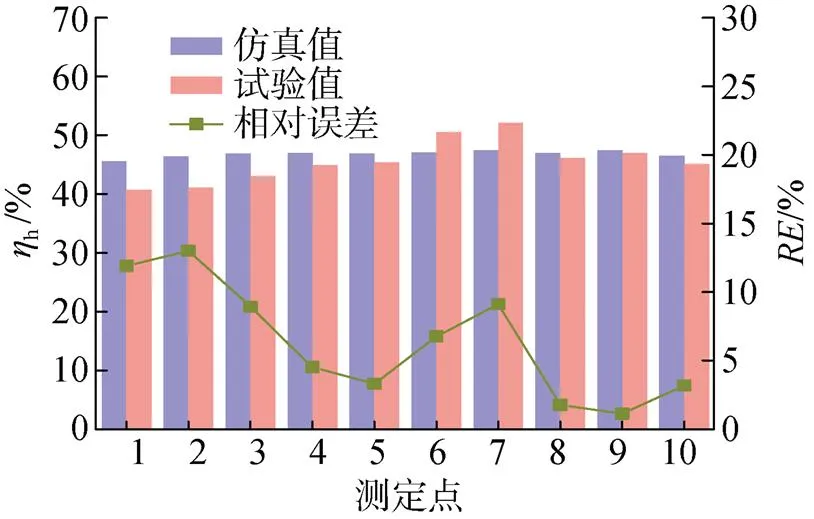
圖5 不同測定點液壓馬達效率值的仿真值、試驗測定值及相對誤差

表2 液壓馬達效率測定點
圖6是隨機選取10個工作點的情況下,發電機的能量轉化效率試驗測定值和仿真值。測定點的發電機扭矩和轉速值如表3所示。由圖可知,仿真值和試驗測定值間的吻合度較高,相對誤差較小,平均誤差僅為5.12%。展示了試驗數據與仿真結果良好的一致性,驗證了模型的準確性。
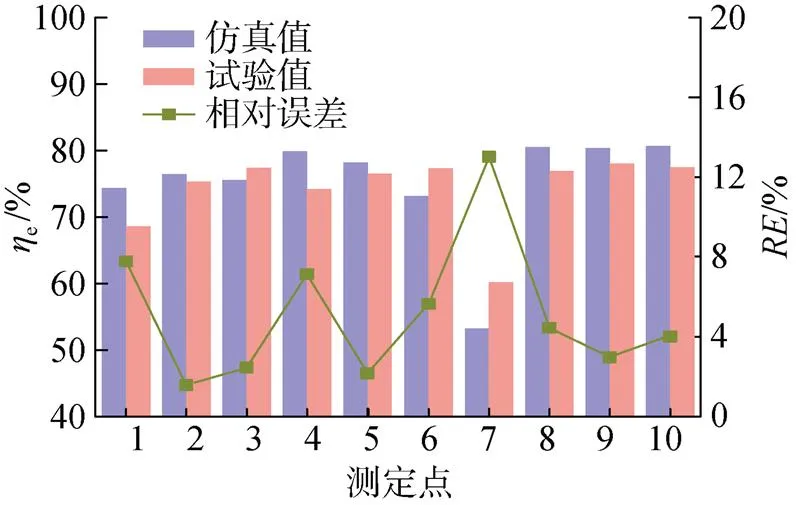
圖6 不同測定點發電機效率值的仿真值、試驗測定值及相對誤差

表3 發電機效率測定點
2.2 液電轉換過程效率分析
針對文中選用的液壓馬達,通過對其工作效率、工作壓力及轉速進行分析得到最佳的工作區間。由式(1)~式(9)可得選定的液壓馬達的容積效率、機械效率隨壓力及轉速的變化情況分別如圖7(a)與圖7(b)所示。
由圖7(a)可知,液壓馬達的容積效率隨著壓力的升高而降低,這是由于隨著壓力的升高,液壓馬達高低壓兩側的壓差增大,使其內漏量增加; 相同壓力條件下,容積效率隨著轉速的升高而升高,這是由于轉速高意味著理論流量大,而泄漏量和轉速無關。由圖7(b)可知,液壓馬達的機械效率隨壓力的升高呈上升趨勢,這是由于隨著壓力的增大,根據式(2)可知,液壓馬達高低壓兩側的壓差增大,液壓功率增大,但是其在轉速不變的前提下機械能量損耗基本不變,從而造成機械效率隨之增大。在相同壓力條件下,機械效率隨著轉速的升高而降低。
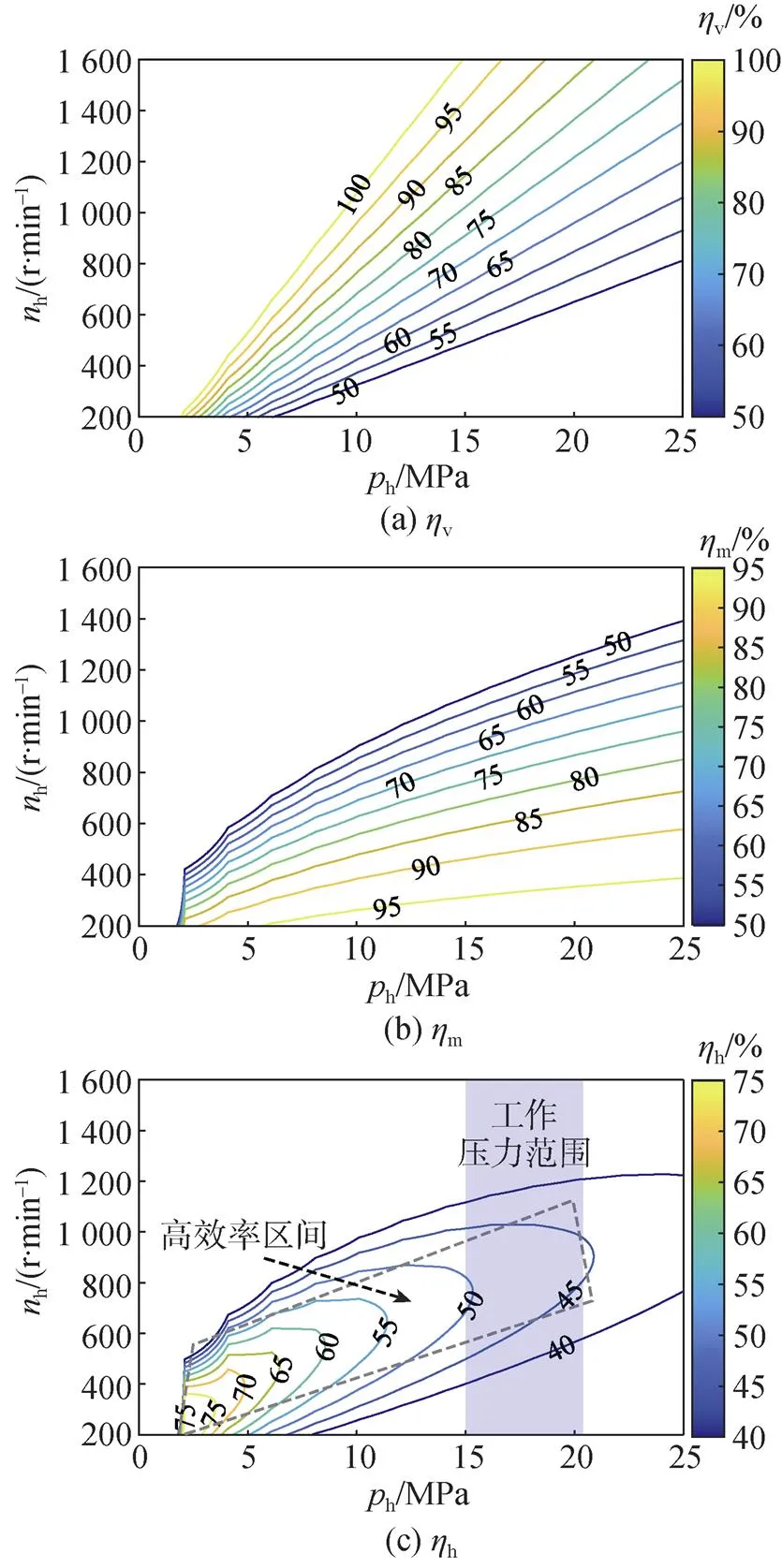
圖7 液壓馬達效率隨壓力和轉速變化曲線圖
由式(4)可得液壓馬達的效率與工作壓力、轉速之間的關系,如圖7(c)所示。由圖可知,當液壓馬達處于低速、小扭矩情況下時,該液壓馬達可以處于較高的效率工作區間。但是,為了保證能量存儲量,設計的系統壓力h范圍在15~21 MPa之間。在此區間內,該液壓馬達轉速h在800~ 1 000 r/min之間,液壓馬達的能量轉化效率相對較高,最大效率hmax為50%。根據液壓馬達輸出的機械功率的定義,液壓馬達的輸出功率

式中:h為液壓馬達排量,由表1得h=0.14 mL/r;h為液壓馬達的轉速,其與液壓馬達轉動的角度m之間的關系為
發電機的輸入功率受限于液壓馬達的輸出功率。當液壓馬達工作在文中設置的最優工作狀態時,根據式(13)以及對圖7的分析可知,液壓馬達輸出的最大機械功率為25 W。因此,發電機僅可能在如圖8中的紫色區域內工作(≤25 W)。此外,當發電機在如圖8中紫色區域和高效率區間的交匯區域內工作時,發電機的效率較高。此時,對應的發電機轉速為5000 ~7000 r/min。
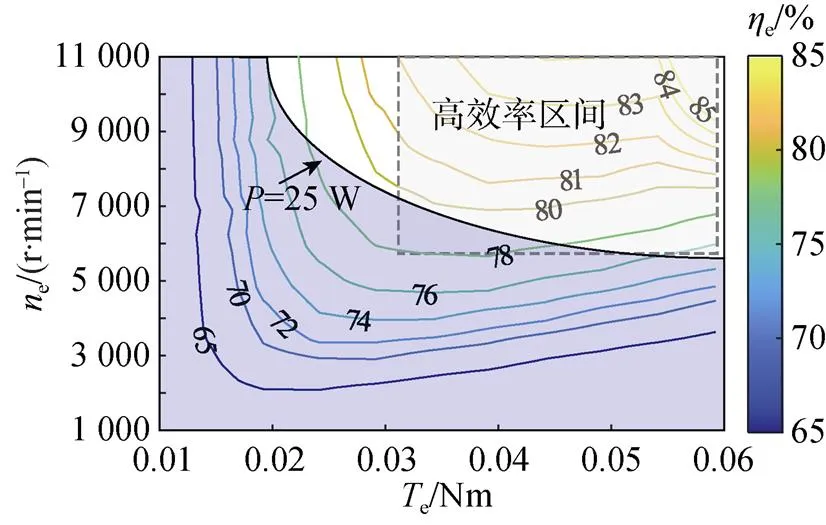
圖8 發電機效率隨扭矩和轉速變化情況.
分析可知,液壓馬達和發電機的最優工作轉速存在差異。為了使液壓馬達和發電機均可在其各自最優的轉速區間內工作,采用了1個增速機構將液壓馬達的輸出轉速(800~1000 r/min)增至發電機的理想工作轉速(5000 ~7 000 r/min),增速比為6∶1。
3 海域試驗
3.1 試驗條件
在上述分析的基礎上,研制了面向水下滑翔機的溫差能供電裝置。2018年6月,在中國南海海域對系統進行發電性能測試。在試驗中,首先將該溫差能供電系統放置于1000 m水深3 h,該深度水溫約為4℃; 而后樣機浮至海洋表面,并在水面停留3 h。表層海水的溫度約為30℃。樣機如圖9(a)所示,海試現場如圖9(b)所示。
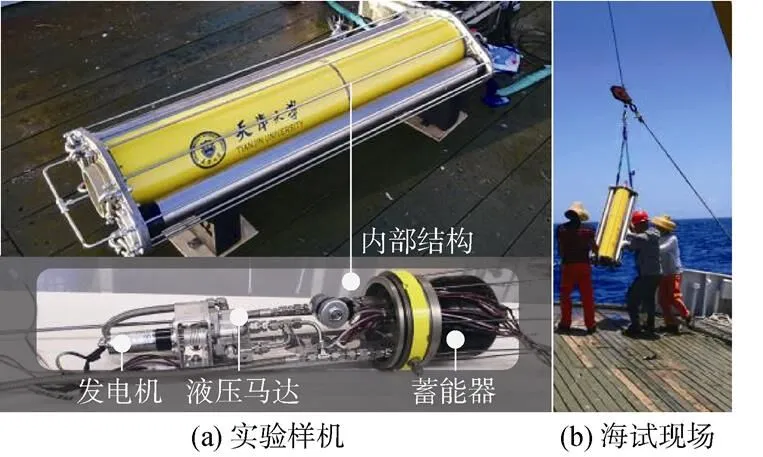
圖9 海洋溫差能供電系統原型樣機及海試現場照片
3.2 試驗結果
試驗過程中的下潛深度dive及蓄能器壓力h隨時間的變化情況如圖10所示。當樣機漂浮至海洋表面時,蓄能器入口的壓力快速升至預充壓力16.5 MPa,在經過30 min之后達到設定的壓力上限20.5 MPa。而后電磁閥開啟,蓄能器中液壓油帶動液壓馬達,發電機轉動進而為電池充電。當蓄能器入口壓力降低至16.5 MPa時,電磁閥關閉,至此完成了第1個發電循環。在1次剖面運動中,該樣機可完成4次上述循環。
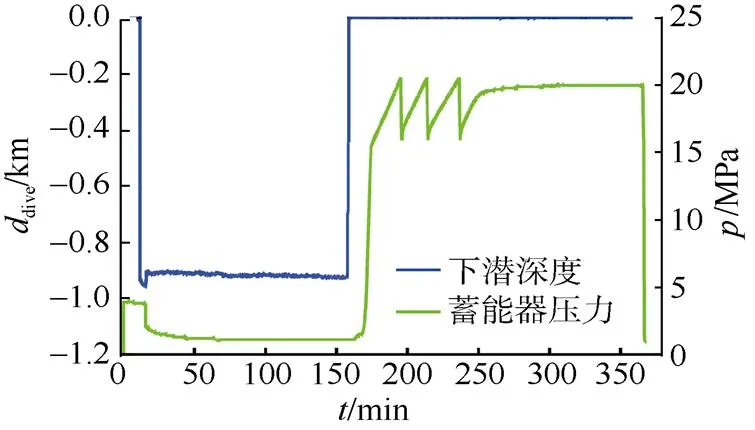
圖10 海試中樣機下潛深度和蓄能器壓力隨時間變化曲線
考慮到蓄能階段并非文中研究重點,因而在后續的討論中僅對發電階段進行討論。圖11為海試中發電階段電池的充電功率與電池存儲電量。由圖可知,在4個發電循環中,發電機最大輸出功率可達30 W,平均功率25 W,1個潛水剖面的累積發電時長為300 s,累積發電量可達6701 kJ。
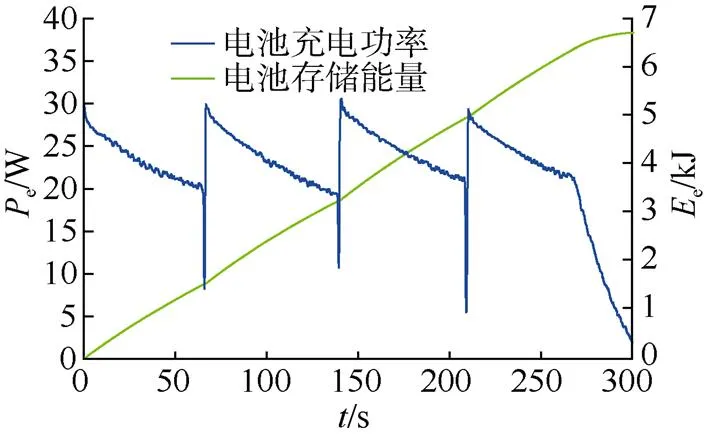
圖11 海試中電池充電功率和存儲能量曲線
為了便于計算樣機的電液轉化效率,對液電轉換試驗效率定義如下
式中:e為電池存儲能量;ha為蓄能器輸出的壓力能,且
根據圖12的蓄能器輸出壓力和流量曲線,利用式(16)可得樣機所收集壓力能ha=17244 J,而電池存儲電能e=6 701J,利用式(15)得樣機在海試中液電轉化過程的能量轉化效率為38.86%。
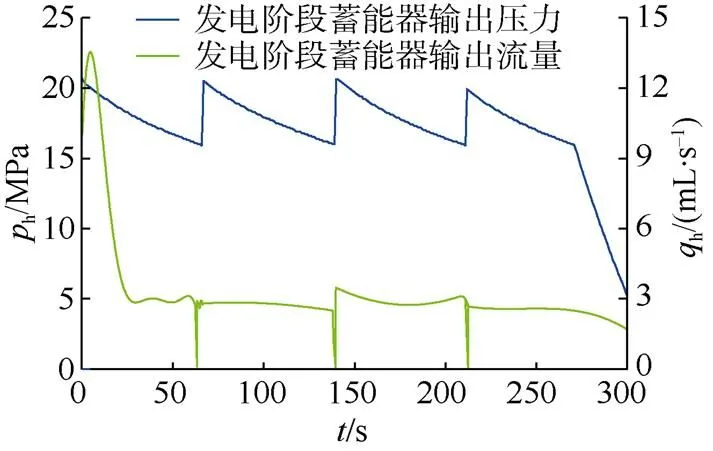
圖12 海試中發電時蓄能器出口端壓力和流量曲線
由圖13可知,利用模型估算的液壓馬達能量轉化效率h為49%~45%,平均能量轉化效率為47%。由圖14可知,利用模型估算的發電機的能量轉化效率e為77%~75%; 平均能量轉化效率為76%; 利用式(10)可得通過模型估算的樣機液電轉化系統能量轉化效率為35.72%。能量轉化效率與試驗結果基本一致。
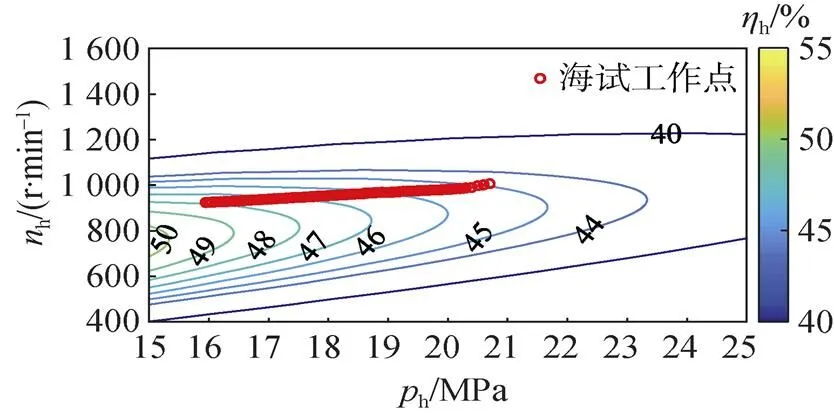
圖13 海試中樣機工作點對應的液壓馬達總效率仿真值
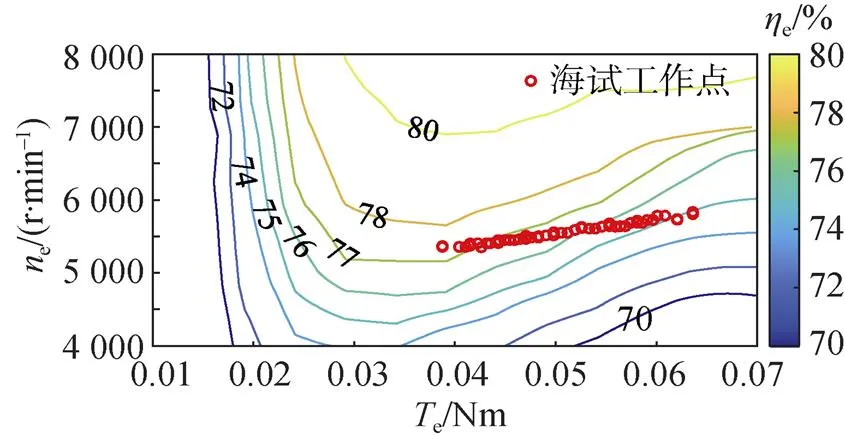
圖14 海試中樣機工作點對應的發電機效率仿真值
4 結束語
文中基于水下滑翔機海洋溫差能供電系統中液壓能-電能轉換過程的能量轉換機理與損耗機理,建立了關鍵器件的參數化能量平衡方程以及液電轉換效率計算公式,開展了液電轉換過程的效率分析計算。通過室內模擬測試與海試驗證了理論模型的正確性與樣機的有效性。得到如下結論。1) 通過室內測試裝置驗證了理論模型可準確對液電轉換效率進行預測。壓力能-動能、動能-電能的能量轉化效率試驗值和仿真值之間的相對誤差分別為6.37%,5.12%。2) 當液壓馬達的工作條件處于低速小扭矩狀態時,其能量轉化效率較高; 發電機處于高速大扭矩狀態時,其能量轉化效率較高。3) 海試結果表明,在一個工作剖面內海洋溫差能供電系統可累計發電6701J,平均液電能量轉化效率可達38.85%,滿足水下航行器的能量需求,驗證了樣機的有效性。
文中結論可為水下滑翔機溫差能供電系統的優化設計與商業化選型提供參考。下一步的工作將對能量傳遞過程可控參數進行最優控制,以延長系統在高效率工作區間的工作時間。
[1] 唐國建,崔鳳. 海洋開發對中國未來發展的戰略意義初探[J]. 上海行政學院學報,2013,14(5): 56-61.
Tang Guo-jian,Cui Feng. The Strategic Significance of Marine Development for Chinese Future Development[J]. The Journal of Shanghai Administration Institute,2013,14(5): 56-61.
[2] 李乃勝. 聚焦海洋裝備國產化,為建設海洋強國提供強有力的工具性支撐[N]. 中國科學報,2017-8-9.
[3] 俞建成,孫朝陽,張艾群. 海洋機器人環境能源收集利用技術現狀[J]. 機器人,2018,40(1): 89-101.
Yu Jian-cheng,Sun Chao-yang,Zhang Ai-qun. The Present Status of Environmental Energy Harvesting and Utilization Technology of Marine Robots[J]. Robot,2017,40(1): 89-101.
[4] 沈新蕊,王延輝,楊紹瓊,等. 水下滑翔機技術發展現狀與展望[J]. 水下無人系統學報,2018,26(2): 89-106.
Shen Xin-lei,Wang Yan-hui,Yang Shao-qiong,et al. Development of Underwater Gliders: An Overview and Prospect[J]. Journal of Unmanned Undersea Systems,2018,26(2): 89-106.
[5] Webb D,Simonetti P,Jones C. SLOCUM: An Underwater Glider Propelled by Environmental Energy[J]. IEEE Journal of Oceanic Engineering,2001,26(4): 447-452.
[6] Yang Y,Wang Y,Ma Z,et al. A Thermal Engine for Underwater Glider Driven by Ocean Thermal Energy[J]. Applied Thermal Engineering,2016,99: 455-464.
[7] Ma Z,Wang Y,Wang S,et al. Ocean Thermal Energy Harvesting with Phase Change Material for Underwater Glider[J]. Applied Energy,2016,178(15): 557-566.
[8] Wang M,Jing R,Zhang H,et al. An Innovative Organic Rankine Cycle(ORC) Based Ocean Thermal Energy Conversion(OTEC) System with Performance Simulation and Multi-objective Optimization[J]. Applied Thermal Engineering,2018,145: 743-754.
[9] Kong Q,Ma J,Che C. Numerical Simulation and Experimental Study of Volumetric Change Rate During Phase Change Process[J]. International Journal of Energy Research,2009,33(5): 513-525.
[10] Kong Q,Ma J,Xia D. Numerical Simulation and OptimiZation of Underwater Glider Operating Process[J]. Rene- wable Energy,2010,35: 771-779.
[11] 田振華,周友援,柳軍飛. 海洋溫差能發電自升降平臺系統建模與仿真[J]. 四川兵工學報,2014,35(1): 31-33,52.
Tian Zhen-hua,Zhou You-yuan,Liu Jun-fei. Modeling and Simulating of Thermal Recharging(TREC) and Power Unit[J]. Journal of Sichuan Ordnance,2014,35(1): 31-33,52.
[12] Wang G,Ha D,Wang K. Harvesting Environmental Thermal Energy Using Solid/liquid Phase Change Materials[J]. Journal of Intelligent Material Systems and Structures,2018,29(8): 1632-1648.
[13] Wang G,Ha D,Wang K. A Scalable Environmental Thermal Energy Harvester Based on Solid/liquid Phase-change Materials[J]. Applied Energy,2019,250: 1468-1480.
[14] 桑勇,邵利來,趙健龍,等. 基于 AMESim 蓄能器組的動態特性研究[J]. 液壓氣動與密封,2018,38(1): 20-24.
Sang Yong,Shao Li-lai,Zhao Jian-long,et al. Study on Multiple Accumulator in Hydraulic System Based on AMESim[J]. Hydraulics Pneumatics and Seals,2018,38 (1): 20-24.
[15] 林添良.工程機械節能技術及應用[M].北京: 機械工業出版社,2017: 101-105.
Modeling and Efficiency Analysis of the Hydro-electric Conversion Process of Underwater Glider Powered by Ocean Thermal Energy
1,1,2*,1,2,1,2
(1. School of Mechanical Engineering,Tianjin University,Tianjin 300350,China; 2. The Joint Laboratory of Ocean Observing and Detection,Qingdao National Laboratory for Marine Science and Technology,Qingdao 266237,China)
Ocean thermal energy power supply is an effective technique to increase the duration and range of underwater gliders. The optimization of the energy transfer path and improvement of the energy conversion efficiency are crucial for improving the operation of underwater gliders. Based on the energy conversion mechanism and loss mechanism of the mechanical energy-electric energy conversion process in the ocean thermal energy power supply system of underwater gliders,this study establishes the parametric energy balance equation,mechanical energy-electric energy conversion model,and conversion efficiency calculation equation of the hydraulic motor and generator and other key devices as well as performs an efficiency analysis of the energy conversion process. The relative error in the conversion efficiency of pressure-kinetic energy and kinetic-electric energy conversions,when comparing the results of the platform test and the model simulation,are 6.37% and 5.12%,respectively. The accuracy of the model is therefore verified,as these relative errors are small. As a result,the optimal design and prototyping of the ocean thermal energy power supply are performed. In the sea trial,the test prototype can harvest 6 701 J of electrical energy,and the energy conversion efficiency of the pressure-electric energy conversion process can reach 38.86%,validating the accuracy and effectiveness of the proposed model.
underwater glider; ocean thermal energy; hydro-electric conversion; conversion efficiency
TJ630; TP242
A
2096-3920(2021)04-0451-08
10.11993/j.issn.2096-3920.2021.04.012
王國暉,楊亞楠,王延輝,等. 海洋溫差能供電水下滑翔機的液電轉換過程建模與效率分析[J]. 水下無人系統學報,2021,29(4): 451-458.
2020-07-28;
2020-11-11.
國家自然科學基金(52006155).
通信作者簡介:楊亞楠(1988-),男,博士,講師,主要研究方向為環境能源水下航行器研制及其應用.
(責任編輯: 楊力軍)
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
電力工程技術(2014年1期)2014-03-20 14:19:06
