基于參數辨識的水下推進永磁同步電機無位置傳感器控制
2021-09-10 08:13:56陳堯偉曾慶軍戴曉強李宏宇姚震球
水下無人系統學報 2021年4期
關鍵詞:模型
陳堯偉,曾慶軍,戴曉強,吳 偉,李宏宇,姚震球
基于參數辨識的水下推進永磁同步電機無位置傳感器控制
陳堯偉1,曾慶軍1,戴曉強1,吳 偉1,李宏宇1,姚震球2
(1. 江蘇科技大學 電子信息學院,江蘇鎮江,212003; 2. 江蘇科技大學 海洋裝備研究院,江蘇鎮江,212003)
針對水下推進器在運行過程中,永磁同步電機的定子電阻、電感等參數會受到溫度、電流變化而導致的無位置控制算法估算轉子位置和速度出現較大誤差的問題,提出了一種基于參數辨識的龍伯格觀測器水下推進器無位置傳感器控制方法。該方法在雙閉環矢量控制的基礎上,采用帶遺忘因子的遞推最小二乘法作為參數辨識算法,通過在線辨識得到電機定子電阻和電感參數,將其取代龍伯格觀測器模型中的初始電阻和電感參數,龍伯格觀測器估算得到的反電動勢作為鎖相環的輸入,最終,由鎖相環輸出得到轉子的位置和速度。仿真結果表明,基于參數辨識的龍伯格觀測器在受到參數變化干擾后,能快速準確地辨識出轉子位置和速度信息,降低了無位置控制系統對電機參數的敏感性。
水下推進器; 永磁同步電機; 龍伯格觀測器; 參數辨識; 遞推最小二乘法; 敏感性
0 引言
近年來,隨著我國對海洋資源的關注度越來越高,水下機器人、水面無人艇以及水下滑翔機等航行器也得到了很大的發展。為實現航行器在廣闊而復雜的海洋環境中長時間安全穩定的作業,就必須對水下推進系統提出更高的性能要求。永磁同步電機(permanent magnet synchronous motor,PMSM)作為水下推進器的核心動力設備,因具有結構簡單、可靠性高、功率密度大等優點,具有良好的應用前景[1]。
PMSM目前常見的控制方式是無位置傳感器控制結合空間矢量脈寬調制(space vector pulse width modulation,SVPWM)控制。由于水下工況復雜,環境惡劣,以及PMSM自身結構及功率密度的限制,電機參數嚴重影響無位置傳感器算法的控制性能,降低了控制系統的穩定性。對此,國內外學者提出參數辨識的概念和大量辨識理論方法[2]。陳再發等[3]通過模型參考自適應方法在線辨識電機參數,運用Runge-Kutta方法建立滿秩可調模型。金寧治等[4]針對內置式PMSM提出了一種在線辨識定子交軸電感、轉子磁鏈的模型參考自適應系統(model reference adaptive system,MRAS)參數辨識方法,解決了模型欠秩問題。劉細平等[5]提出一種將小生鏡策略和混沌變異策略相結合的混沌變異小生境粒子群算法(niche chaos particle swarm optimization,NCPSO),同時辨識了4個參數,分別是定子繞組電阻,定子繞組軸軸電感以及永磁體磁鏈。荊祿宗等[6]在采用變分理論實現最小絕對值偏差法(least absolute deviations,LAD)的基礎上,研究了一種基于遞歸神經網絡(recursion neural network,RNN)的辨識方法。董召強等[7]采用最小二乘法(recursive least square,RLS)在線辨識電機參數,并在硬件上實現辨識算法。
文中的研究對象為表貼式PMSM,采用龍伯格觀測器的無位置傳感器控制,結合了一種帶有遺忘因子的RLS辨識方法,并通過電壓瞬態方程構建辨識模型,辨識得到電機的定子電阻和電感值,將其取代龍伯格觀測器模型的初始電機參數,從而得到對參數不敏感的龍伯格觀測器,繼而得到更準確的轉子位置和轉速信息,最后對設計的辨識方法進行了仿真驗證。
1 水下推進PMSM
1.1 水下推進器原理
如圖1所示,相較于傳統的水下推進器,一體式水下推進器是將導流罩、減速器、螺旋槳、連接軸和電機等集成的水下動力系統,具有質量輕、工作噪聲小、散熱性能好、功率密度大、動力傳輸效果好等優點,常適合作為水下機器人、水面快艇和水上無人艇的推進系統。
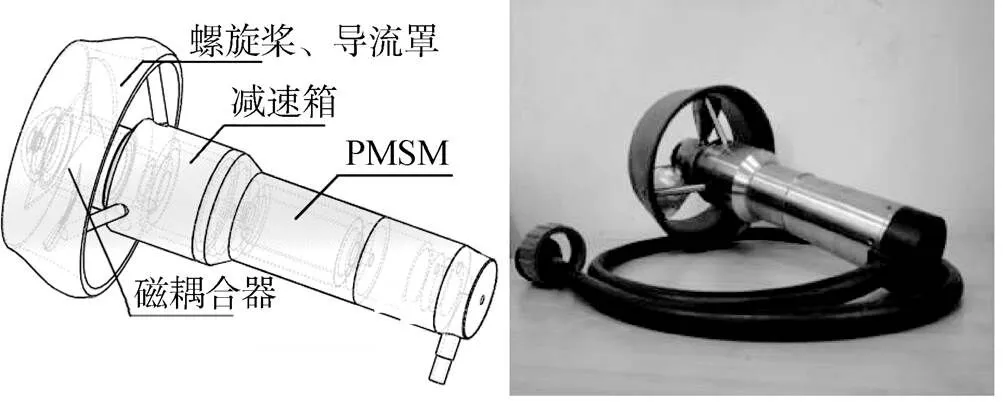
圖1 水下推進器原理及實物圖
PMSM轉子連接磁耦合器的輸入軸,由PMSM帶動磁耦合器轉動,磁耦合器的輸出軸連接螺旋槳,使螺旋槳與電機轉子同步轉動,進而實現由電機到螺旋槳的電力傳動。導管能夠將槳葉的尾渦轉化為導管的附著渦,有效起到整流作用,增大了推力。磁耦合器可以有效地隔離海水,從而實現水下推進器的靜密封。
1.2 水下推進PMSM數學模型
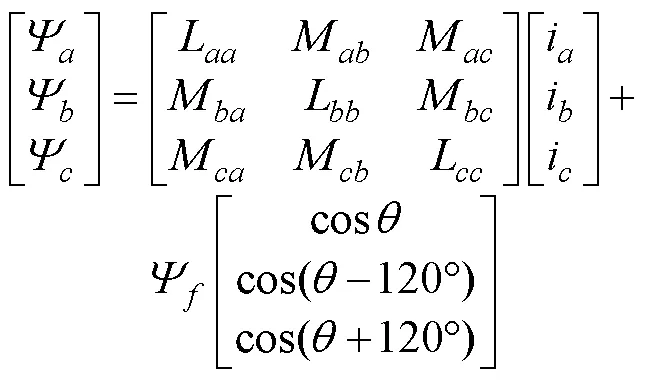
取逆時針方向為電機旋轉的正方向,按照電動機原則建立PMSM數學模型。PMSM三相繞組的電壓方程可以表示為[8]

由于PMSM在三相坐標系中的數學模型是一個多變量、強耦合以及非線性的系統,很難對其進行控制,因此,需對其進行坐標變換,變為兩相靜止坐標系。則PMSM在兩相靜止坐標系下的數學模型為[9]


在磁場等效的基礎上,將兩相靜止坐標系轉換為兩相旋轉坐標系。則PMSM在兩相旋轉坐標系下的電壓數學模型為[10]

2 龍伯格觀測器設計
龍伯格觀測器辨識轉子位置的基本思路為,利用給定電流和反饋電流之間的誤差來重構電機的反電動勢,即將實際電流值與估算電流值的誤差作為輸入,輸出得到反電動勢估計值,用兩反電動勢相位關系,通過鎖相環估算轉子位置和速度。


圖2 漸進狀態觀測器原理圖
由式(3)可知,PMSM在兩相靜止坐標系下的電壓方程中含有轉子速度和位置信息,根據該模型設計PMSM龍伯格觀測器。對反電動勢做微分,并以矩陣的形式表達電機數學模型,可以得到

根據漸進狀態觀測器原理圖,可建立龍伯格觀測器模型為

龍伯格觀測器設計原理如圖3所示。

圖3 龍伯格觀測器原理圖
將龍伯格觀測器估算得到的反電動勢作為鎖相環的輸入,由鎖相環輸出得到轉子的位置和速度。
3 基于參數辨識的龍伯格觀測器設計
由于水下環境惡劣,且水下推進器大多是低壓大功率類型,所以有較大的電機相電流,會出現明顯的發熱現象,而電機參數中定子電阻受溫升影響最大,電感受磁路飽和影響最大,根據式(7)可知,龍伯格觀測器模型是以電機初始的定子電阻和電感參數建立的,所以參數的變化會嚴重影響無位置傳感器控制性能。因RLS具有算法簡單、易于實現等優點,文中將使用帶遺忘因子的RLS在線辨識電機的定子電阻和電感參數,并將其取代龍伯格觀測器中的初始電機參數[12-13]。
3.1 帶遺忘因子的RLS
系統的輸入量和輸出量可以表示為

遞推RLS是指當被辨識系統運行時,利用新引入的觀測數據對前次估計的結果不斷進行修正,得出新的參數估計值,減少估計誤差,直到參數估計值達到滿意的精確程度[14-15]。
構建目標函數





3.2 帶遺忘因子的RLS參數辨識

由于文中采用i=0的控制方式,所以式(15)變為

由式(16)可知,基于旋轉坐標系下的電機模型最多只能同時辨識1個參數,故若想辨識得到2個參數,可以增加額外的方程或者減少辨識參數。
為了辨識2個參數,采用分步辨識方法。由于溫敏參數電阻的變化速率遠遠小于電感,所以在每個周期內,將電阻值作為定值,辨識得到電感的估算值; 每10個周期內,將電感值作為定值,辨識得到電阻的估算值,以此循環更新。

對式(17)進行離散化處理,得到

根據式(8)和式(18),可以得到


得到帶遺忘因子的RLS辨識電機電感的遞推公式




對式(25)進行離散化處理,得到

根據式(8)和式(26),可以得到


得到帶遺忘因子的RLS辨識電機電感的遞推公式



由該辦法辨識得到電機的定子電阻和電感值。
3.3 基于帶遺忘因子的RLS龍伯格觀測器設計
4 仿真結果與分析
4.1 試驗系統構建
文中設計的水下推進器無位置傳感器控制系統采用雙閉環和SVPWM控制,內環為電流環,采用i=0的控制方式,外環為轉速環控制。控制系統結構如圖4所示。

圖4 水下推進器無位置傳感器控制系統圖


表1 PMSM參數
在整個系統建模過程中,最重要的是建立一個參數可變的電機模型,從而實現改變電機參數的作用。PMSM可變模型如圖5所示。

圖5 PMSM參數可變模型
建立龍伯格觀測器模型,電機的三相電流和電壓作為輸入,最終通過鎖相環得到電機的轉子位置和速度。龍伯格觀測器模型如圖6所示。
建立帶遺忘因子的RLS龍伯格觀測器模型,其模型如圖7所示。其中帶遺忘因子的RLS算法通過函數引入模型中。
最終得到帶遺忘因子的RLS龍伯格觀測器模型,如圖8所示。
4.2 仿真結果分析
為了更加接近于真實工況,假設電機滿載工作在1 500 r/min最大轉速下,定子電阻會隨著溫升而變化。經實驗結論可知,當溫升變化25℃時,電阻參數變化約20%。由于水下推進器主要通過水散熱,散熱性能很好,而電感隨著電流變大而減少。所以在0~0.2 s內,電機的定子電阻和定子電感都為初始值,即L=5.25 mH,R=0.952 5Ω;在=0.2 s時,電機仍然工作在最大轉速下,電感階躍減少約10%,變為L=4.725 mH,電阻階躍增大約10%,變為R=1.047 75 Ω。圖9為帶遺忘因子的RLS辨識電機定子電感的估計值與實際值,圖10為帶遺忘因子的RLS辨識電機定子電阻的估計值與實際值。

圖6 龍伯格觀測器模型

圖7 帶遺忘因子的RLS模型

圖8 帶參數辨識的龍伯格觀測器模型

圖9 帶遺忘因子的RLS辨識定子電感的估計值與實際值

圖10 帶遺忘因子的RLS辨識定子電阻的估計值與實際值
圖11(a)和圖12(a)為未結合參數辨識和結合參數辨識的龍伯格觀測器觀測得到的估算反電動勢圖,(b)為其局部放大圖。
通過圖11和圖12可以看到,在=0.2 s時,電機定子電感和定子電阻發生階躍突變,未結合參數辨識的龍伯格觀測器,由于觀測器模型仍然是電機參數的初始值,所以對電機反電動勢的估算出現了較大的振蕩; 而結合參數辨識的龍伯格觀測器,對電機反電動勢的估算出現振蕩后很快便收斂穩定。
圖13為龍伯格觀測器觀測得到的電機轉子實際位置與估計位置誤差圖。
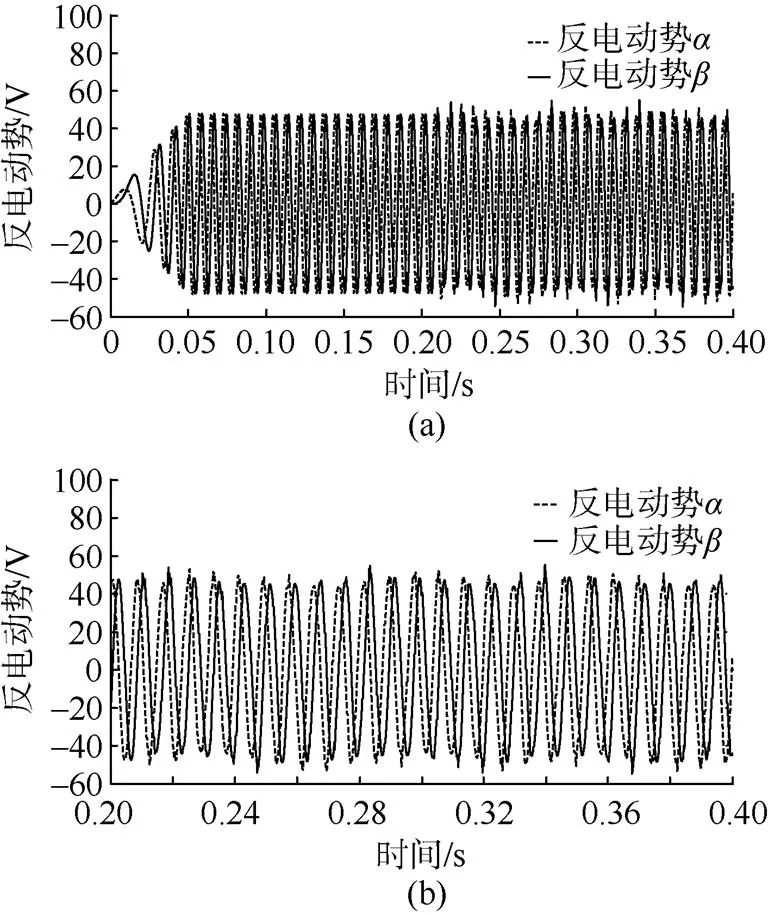
圖11 未結合參數辨識的龍伯格觀測器估算反電動勢

圖12 結合參數辨識的龍伯格觀測器估算反電動勢

圖13 龍伯格觀測器轉子位置誤差
圖14和圖15為龍伯格觀測器觀測得到的轉子實際轉速和估計轉速及其誤差圖。

圖15 龍伯格觀測器轉子實際轉速與估計轉速誤差
通過圖14和圖15可以看出,在=0.2 s,未結合參數辨識的龍伯格觀測器,由于自身的模型參數與電機的真實值不同,使得估算的電機反電動勢不穩定,最終表現在轉子轉速出現了將近400 r/min的大幅度振蕩; 而結合了參數辨識的龍伯格觀測器,其模型參數接近于電機的真實值,所以表現在轉子轉速誤差上出現波動后,很快收斂到正常誤差范圍。
5 結束語
為了實現水下推進器系統控制,解決電機定子電感和電阻參數在環境影響下的改變對無位置傳感器控制性能的影響問題,文中通過基于參數辨識的龍伯格觀測器,實現了水下推進器無位置傳感器控制系統雙閉環和SVPWM控制。
通過仿真結果可以得出,電機轉速最終表現出較大振蕩的根本原因在于,當電機定子電阻電感參數發生變化時,龍伯格觀測器中的模型參數仍然為電機的初始參數,導致對反電動勢的觀測出現了較大誤差; 通過結合帶遺忘因子的RLS龍伯格觀測器,降低了對電機參數的敏感性,得到了更穩定的轉子位置和速度辨識值,為水下航行器的多自由度運動提供了保障。文中電機控制僅限于仿真,電機的定子電阻和電感在實際工況中的變化值還需結合實驗得到變化曲線,后續工作可以此繼續深入。
[1] 楊國良,李建雄. 永磁同步電機控制技術[M]. 北京: 知識產權出版社,2015.
[2] 劉偉,王俊. 永磁同步電機參數辨識研究綜述[J]. 電氣技術,2020,21(8): 1-5,135.
Liu Wei,Wang Jun. Summary of Research on Parameter Identification of Permanent Magnet Synchronous Motors[J]. Electrical Technology,2020,21(8): 1-5,135.
[3] 陳再發,劉彥呈,盧亨宇. 船舶推進永磁同步電機參數在線辨識方法研究[J]. 電機與控制應用,2018,45(10): 66-72.
Chen Zai-fa,Liu Yan-cheng,Lu Heng-yu. Research on On-line Identification Method of Marine Propulsion Permanent Magnet Synchronous Motor Parameters[J]. Electric Machines and Control Applications,2018,45(10): 66-72.
[4] 金寧治,周凱,Herbert Ho-Ching IU. 帶有自適應參數辨識的IPMSM MTPA控制[J]. 電機與控制學報,2020,24(7): 90-101.
Jin Ning-zhi,Zhou Kai,Herbert Ho-Ching IU. IPMSM MTPA Control with Adaptive Parameter Identification[J]. Journal of Electrical Machines and Control,2020,24(7): 90-101.
[5] 劉細平,胡衛平,鄒永玲,等. 改進粒子群算法的永磁同步電機多參數辨識[J]. 電機與控制學報,2020,24 (7):112-120.
Liu Xi-ping,Hu Wei-ping,Zou Yong-ling,et al. Multi-parameter Identification of Permanent Magnet Synchronous Motors Based on Improved Particle Swarm Optimization[J]. Journal of Electrical Machines and Control,2020,24(7): 112-120.
[6] 荊祿宗,吳欽木. 基于遞歸神經網絡的永磁同步電機參數辨識研究[J]. 電氣傳動,2020,50(3): 87-91,101.
Jing Lu-zong,Wu Qin-mu. Research on Parameter Identification of Permanent Magnet Synchronous Motor Based on Recurrent Neural Network[J]. Electric Drive,2020,50(3): 87-91,101.
[7] 董召強,徐秋霞,高瑾. 基于最小二乘法和硬件在環平臺的永磁同步電機參數辨識[J]. 電機與控制應用,2017,44(6): 57-62.
Dong Zhao-qiang,Xu Qiu-xia,Gao Jin. Permanent Magnet Synchronous Motor Parameter Identification Based on Least Squares Method and Hardware-in-the-loop Platform[J]. Electric Machines and Control Applications,2017,44(6): 57-62.
[8] Zhang G,Wang G,Xu D,et al. ADALINE-network-based PLL for Position Sensorless Interior Permanent Magnet Synchronous Motordrives[J]. IEEE Trans. Power Electron.,2016,31(2): 1450-1460.
[9] 郭志榮,高峰,王其林. 基于RBF網絡和MRAS的魚雷永磁同步電機無速度傳感器控制方法[J]. 水下無人系統學報,2017,25(6): 448-452.
Guo Zhi-rong,Gao Feng,Wang Qi-lin. Speed Sensorless Control Method of Torpedo Permanent Magnet Synchronous Motor Based on RBF Network and MRAS[J]. Journal of Underwater Unmanned Systems,2017,25(6): 448-452.
[10] 譚人之.工業機器人永磁同步電機的參數辨識與控制研究[D]. 長沙: 湖南大學,2018.
[11] 陳光普. 基于自適應龍伯格觀測器的永磁同步電機無位置傳感器控制系統研究[D]. 杭州: 浙江大學,2019.
[12] 林瑤瑤. 永磁同步電機參數辨識方法與伺服控制技術研究[D]. 大連: 大連理工大學,2018.
[13] Dang D Q,Rafaq M S,Choi H H,et al. Online Parameter Estimation Technique for Adaptive Control Applications of Interior PM Synchronous Motor Drives[J]. IEEE Trans. Ind. Electron.,2016,63(3): 1438-1449.
[14] 劉永欽,沈艷霞,紀志成.基于改進型最小二乘法的感應電機轉動慣量辨識[J].電機控制與應用,2008,35(12): 13-17.
Liu Yong-qin,Shen Yan-xia,Ji Zhi-cheng. Identification of Inertia Moment of Induction Motor Based on Improved Least Square Method[J]. Motor Control and Application,2008,35(12): 13-17.
[15] 錢鑫,王崇武,于琨琨,等. 基于遞推最小二乘法的永磁同步電機參數辨識[J]. 魚雷技術,2014,22(6): 452- 456.
Qian Xin,Wang Chong-wu,Yu Kun-kun,et al. Permanent Magnet Synchronous Motor Parameter Identification Based on Recursive Least Squares Method[J]. Torpedo Technology,2014,22(6): 452-456.
[16] 劉旭,王旭平,王淑紅,等. 基于最小二乘法的永磁同步電機電感辨識研究[J]. 電機與控制應用,2020,47(6): 1-5,32.
Liu Xu,Wang Xu-ping,Wang Shu-hong,et al. Research on the Inductance Identification of Permanent Magnet Synchronous Motor Based on Least Square Method[J]. Electric Machines and Control Applications,2020,47(6): 1-5,32.
1. 戴磊,李洋洋,尤錢亮,等. 基于LMI算法的永磁同步電機混沌最優控制. 2021,29(3).
2. 張國楠,胡利民,王建平,等.一種低速大扭矩永磁同步電機設計方案. 2020,28(6).
3. 徐鵬程,曾慶軍,陳堯偉,等. 基于導管螺旋槳負載的ROV推進器滑模控制. 2020,28(5).
4. 尤錢亮,魏海峰,常徐,等. 基于三自由度動態內模解耦的PMSM弱磁控制. 2020,28(1).
5. 張明明,劉維亭,魏海峰,等. 基于滑模觀測器的PMSM單相霍爾位置傳感器故障容錯控制算法. 2019,27(6).
6. 郭志榮,高峰,王其林. 基于RBF網絡和MRAS的魚雷永磁同步電機無速度傳感器控制方法. 2017,25(6).
Sensorless Control of Underwater Propulsion PMSM Based on Parameter Identification
1,1,1,1,1,2
(1. Electronic and Information College,Jiangsu University of Science and Technology,Zhenjiang 212003,China; 2. Marine Equipment Research Institute,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
In the operation of an underwater propeller,parameters of the permanent magnet synchronous motor(PMSM),such as stator resistance and inductance,are changed based on the temperature and current,resulting in a large error of the rotor position and speed,which are estimated by a sensorless control algorithm. In this paper,a sensorless control method is proposed to control an underwater propeller based on the Luenberger observer combined with parameter identification. In this method,based on a double closed-loop vector control strategy,recurrence least square(RLS) combined with a forgetting factor is adopted as an online parameter identification algorithm to evaluate the stator resistance and motor inductance. The initial resistance and inductance parameters in the Luenberger observer model are thereafter replaced using the same algorithm. The back electromotive force estimated through the Luenberger observer is used as the input of the phase-locked loop. Finally,the position and speed of the rotor are obtained from the output of the phase-locked loop. The simulation results show that the rotor position and speed can be rapidly and accurately identified by Luenberger observer when this parameter identification technique,which reduces the sensitivity of motor parameters on sensorless control system,is used.
underwater propeller; permanent magnet synchronous motor; Luenberger observer; parameter identification; recurrence least square; sensitivity
TM351; TJ630.32
A
2096-3920(2021)04-0442-09
10.11993/j.issn.2096-3920.2021.04.011
陳堯偉,曾慶軍,戴曉強,等. 基于參數辨識的水下推進永磁同步電機無位置傳感器控制[J]. 水下無人系統學報,2021,29(4): 442-450.
2020-10-22;
2020-11-20.
國家自然科學基金項目(11574120); 江蘇省產業前瞻與共性關鍵技術項目(BE2018103).
陳堯偉(1996-),男,在讀碩士,主要研究方向為電力電子裝置與系統.
(責任編輯: 許 妍)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
