基于實航數據的定常海流動力學模型驗證評估
2021-09-08 08:19:06吳小濤
數字海洋與水下攻防 2021年4期
關鍵詞:模型
吳小濤,趙 冉,喬 冰
(中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
海流是重要的海洋環境因素,影響水面、水下設備的姿態、速度、位置及能耗,在UUV(Unmanned Underwater Vehicle)路徑規劃、精確控制等算法設計時必須考慮海流的影響,需要對海流建模并研究對被控對象的影響。海流可以分為定常流、不定常海流,絕大部分海流都隨時間、海域變化,但是在較小的時間、空間尺度內海流可近似為定常流。定常流建模相對簡單,使用時可以直接在UUV動力學模型的速度項疊加海流速度[1];對于隨時間和空間變化的不定常流,目前一般采用 X波段雷達測量特定海域海流數據[2],對實測海流數據進行插值和平滑處理[3],然后利用柵格法對海流進行離散化處理,生成不同時刻的海流地圖,使用時根據時間、空間信息查表獲取精確海流[4]。
不定常海流的建模和使用過程較為復雜,最關鍵的是海流實測數據難以獲取;而定常流由于使用簡單方便得到了廣泛應用。文獻[5]設計了在定常流環境下的欠驅動AUV三維路徑跟蹤控制算法。文獻[6]搭建了載人潛水器動力學模型,對定常流和機械手臂動作進行建模以研究對潛水器的干擾。文獻[7]研究了海流、海浪干擾對潛射導彈水下發射過程的影響。文獻[5]-[7]在對海流建模時均直接使用文獻[1]中定義的直接在載體動力學模型疊加海流速度的處理方法,但是該模型是基于流體力學原理簡化推導得到的[1,8],其可信度和準確程度并沒有相應的驗證文獻報道和相應的支撐數據。
針對這一問題,為了驗證定常海流動力學模型的正確性,提高仿真結果可信度,本文在UUV試驗過程中采用流速剖面儀實時采集記錄海流信息,截取典型航段數據作為驗證海流模型的參考基準,在實航試驗基礎上分別設計了無海流、有海流的半實物仿真(Hardware In Loop,HIL)對比試驗,對定常海流動力學模型的準確性進行了評估。下文所述海流均為定常海流。
1 使用的數學模型
1.1 定常海流動力學模型
實際海洋中的海流實測結果表明:海流的大小、方向與測試的時間、地理位置、地形、深度均相關,海流干擾既有確定性也有隨機性[7]。定常海流速度和方向為常量,那么當水下航行體在海流中運動時,相當于在原流場上再疊加海流的流場,海流的速度是牽連速度,牽連運動為定常平移運動。在水下航行體運動的過程中,作用在航行體上的流體動力如升力、阻力和力矩等都取決于航行體相對于流體的速度、攻角和側滑角等。因此,水下航行體動力學模型中各運動學參數在這個意義上都是相對流體的,只有在無海流時,獲得的運動學參數才是相對于地面坐標系的[1],即

式中:vt為水下航行體在地面坐標系中的速度;vw為海流在地面坐標系中的速度;vtw為水下航行體相對于海流的速度。使用時可根據載體姿態將導航坐標系的定常海流投影到UUV載體坐標系,在載體坐標系中的動力學模型部分疊加載體速度和海流速度以計算載體所受力和力矩[1]。
1.2 水下航行體動力學模型
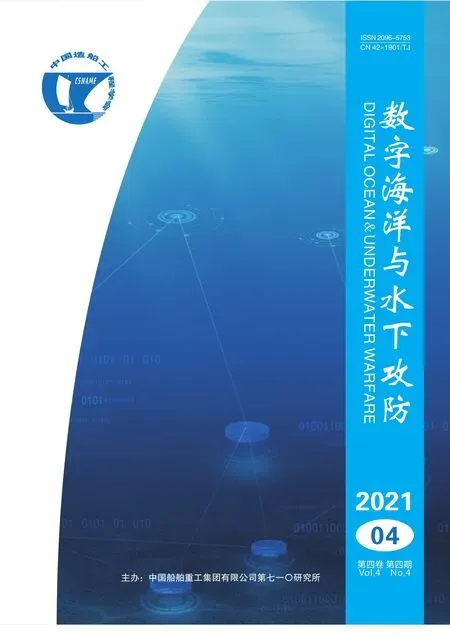
本文研究的水下航行體為圓柱形回轉體,其空間運動模型由動力學模型和運動學模型組成,運動學模型是標準模型,航空航天及水下裝備的運動學模型相同。運動學模型根據載體速度、角速度及各項初始值計算載體姿態、速度、位置,水下航行體動力學模型在體坐標系中的一般形式為
式(2)中等號左側由動量和動量矩定理建立,等號右側ΔGx、ΔGy、ΔGz是負浮力,T是螺旋槳推力,Gmx、Gmy、Gmz是質浮心距造成的力矩,Mxp為螺旋槳轉動帶來的失衡力矩。F…(α,β,vtw)為流體作用在 UUV 上的外力,M…(α,β,vtw)是流體造成的力矩,流體動力包含流體慣性力、流體黏性位置力、流體黏性阻尼力。
F…(α,β,vtw)及 M…(α,β,vtw)中的速度即為式(1)中載體相對于海流的速度,相應的攻角 α、側滑角 β都需要用vtw計算,下文中半實物仿真都是采用式(2)展開后的動力學方程[1]進行仿真計算。
2 試驗設計
2.1 試驗設計思路
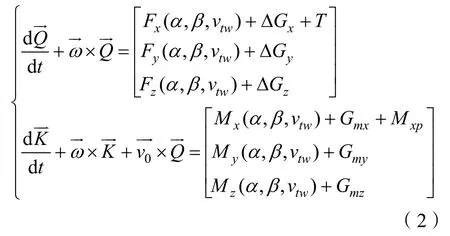
評估模型準確度的方法有很多,與實測數據對比是較為常見的一種方法。實航試驗中海流通過作用在UUV上的力和力矩改變UUV的速度、姿態、軌跡;而海流模型直接影響UUV動力學模型中的速度,從而導致UUV所受流體動力、力矩發生改變。在航路相同的情況下,實航試驗中影響航行的主要因素有控制算法、UUV運動特性、海流;半實物仿真試驗中對應為控制算法、UUV模型、海流模型,如圖1所示。
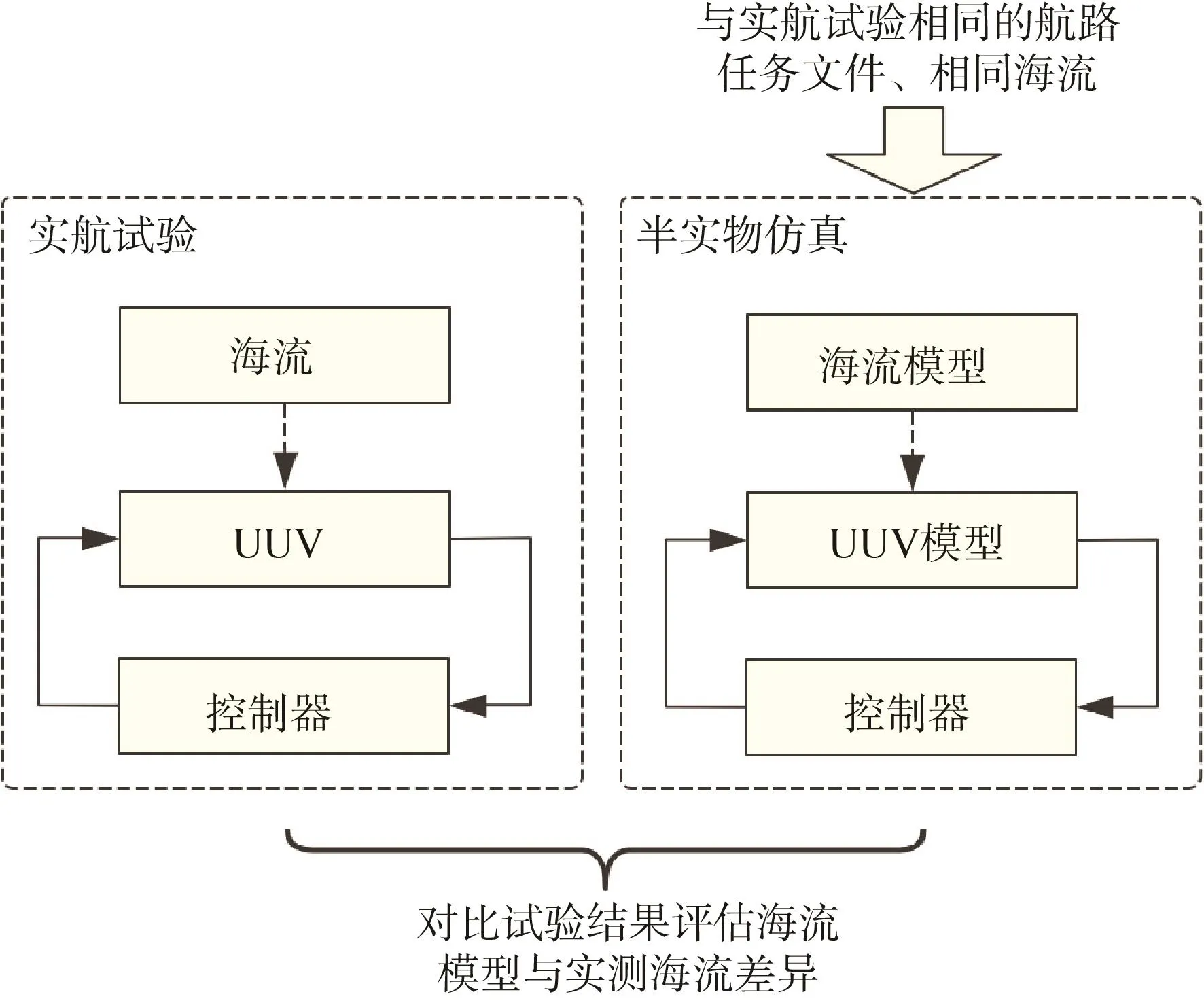
圖1 實航試驗與半實物仿真試驗主要影響因素示意圖Fig.1 Schematic diagram of main influencing factors of voyage and the HIL simulation experiment
要評估海流模型需要確保UUV模型與UUV實物動態特性一致,需要對UUV模型進行校驗,詳見2.2節內容。在此基礎上,在半實物仿真試驗中采用與實航試驗相同的航路任務文件,并分別帶入實航試驗記錄的海流參數和無海流參數進行試驗,最后對比實航試驗和半實物仿真試驗中的 UUV姿態、速度、軌跡以評估海流模型準確程度。
2.2 UUV空間運動模型校驗及驗證
UUV空間運動模型需要進行校驗以確保模型特性與實物動態特性一致,UUV模型的校驗方法詳見文獻[9],簡要流程如圖 2所示,本文中不再贅述。UUV空間運動模型校驗后能準確反映UUV的運動特性,仿真結果與實航結果可高度一致。
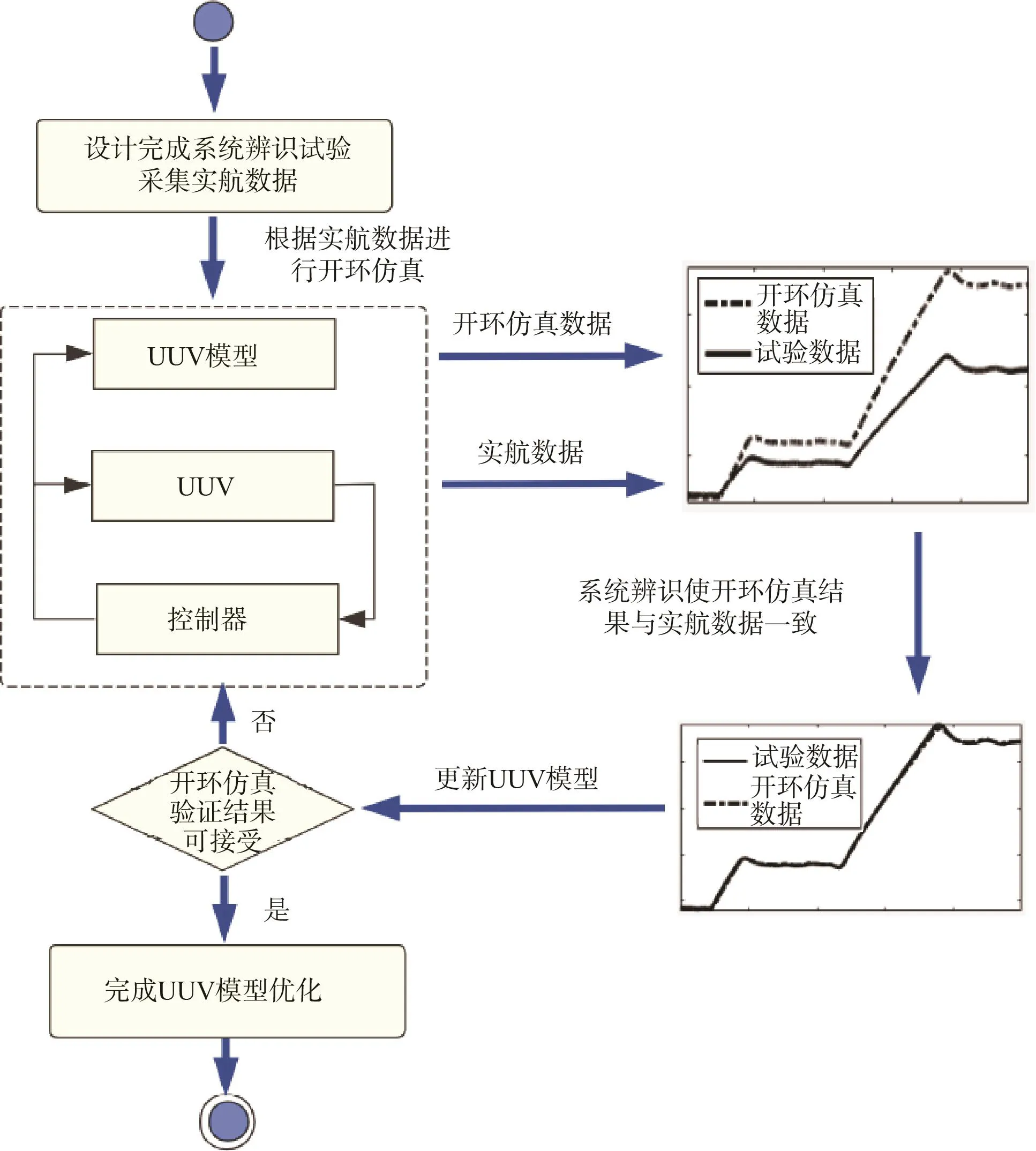
圖2 UUV空間運動模型校驗過程示意圖Fig.2 Schematic diagram of calibration process of UUV spatial motion model
2.3 實航試驗過程
利用UUV實航試驗的剩余條次,選擇試驗海域中海流較為明顯的航路進行驗證試驗。試驗限定在一個經緯度跨度不到0.15°的矩形海域內,試驗從上午約10點開始,下午18點前結束,時間跨度不大于8 h。試驗航線及海流驗證航路如圖3所示,圖中經緯度整數部分做了處理,小數部分保留真實數值。
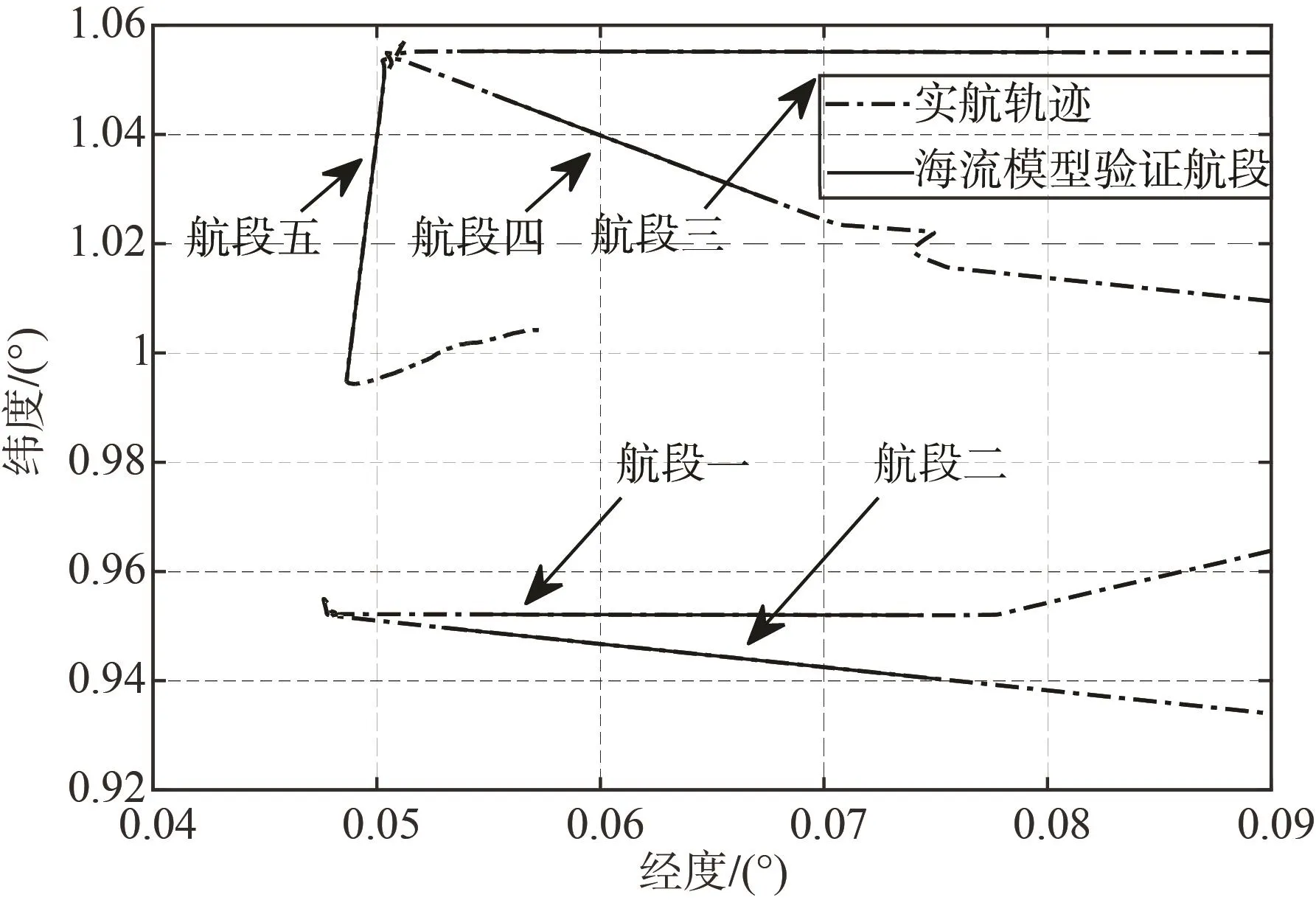
圖3 航段示意圖Fig.3 Schematic diagram of voyage section
試驗時 UUV在水下按照設定航線自主定深10 m定速5 kn航行,流速剖面儀安裝在試驗船上,安裝深度水下2.2 m,試驗船尾隨UUV航行并保持一定安全距離(約 500~800 m),近似認為流速剖面儀測得海流與UUV自主航行所處海流環境相同。流速剖面儀測得的各驗證航段海流信息整理在表1中,表中的航線角是預設航線的夾角,UUV在無海流情況下航線角與航向角一致。
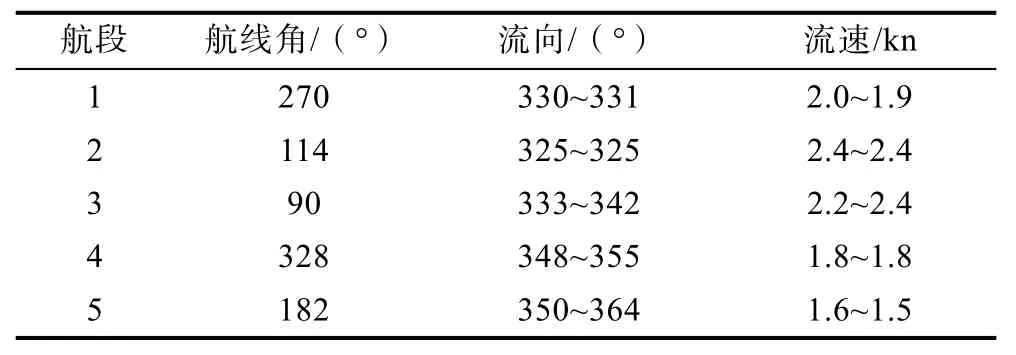
表1 海流模型驗證試驗工況Table 1 Current model validation conditions
2.4 半實物仿真試驗簡介
參與半實物仿真試驗的UUV設備有:控制器、控制臺、舵機、慣導、深度傳感器;仿真系統由仿真主機、仿真監控機、深度模擬器、三軸仿真轉臺組成。半實物仿真時,控制器根據固聯在三軸轉臺上的慣導、安裝在深度模擬器上的深度傳感器等敏感元件感受自身姿態、速度、深度等信息,根據控制算法和航路文件解算出舵角和電機轉速發送給舵機、電機模型;半實物仿真系統采集舵角反饋和電機指令信息輸入 UUV空間運動模型,模型根據舵角、電機轉速及初始參數實時計算出運載平臺在航行過程中的姿態、深度、速度、位置信息,仿真機將這些載體信息發送給三軸仿真轉臺、深度模擬器,組成一個信息閉環進行半實物仿真試驗。
3 對比試驗結果
3.1 試驗過程
半實物仿真試驗中各航段的航路文件應保持一致,根據實航試驗中截取的航段,每個航段應安排相同海流和無海流兩條次半實物仿真試驗。試驗結果表明:水平面海流僅影響載體軌跡、航向角和速度,由于UUV采用了定航速控制,因此影響UUV的電機轉速。下面分別對5個航段的試驗工況、驗證試驗結果進行詳細說明。
3.2 第一航段驗證
第一航段試驗工況設置如表 2所示,試驗結果曲線見圖 4-5。第一航段航線角 270°,海流方向330°,屬于側向流。由圖4可見:實航試驗時UUV按照設定航跡航行;有海流仿真試驗中UUV軌跡與設定航線保持一定距離(約25 m)且偏向海流的流向。由圖5可見:無海流仿真時,UUV航向角約 270°,與設定航線角一致,電機轉速約220 r/min,與湖試中實測數據相同。有海流仿真試驗的航向角約249°,電機轉速在240~260 r/min波動,與實航試驗中的內記數據一致。
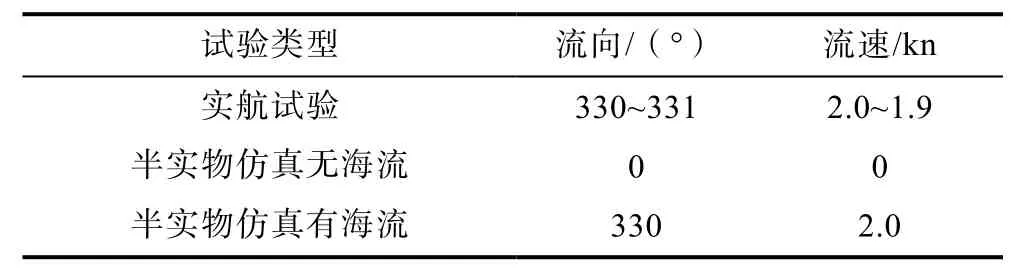
表2 第一航段驗證試驗工況設置Table 2 Settings of validation conditions for the first voyage
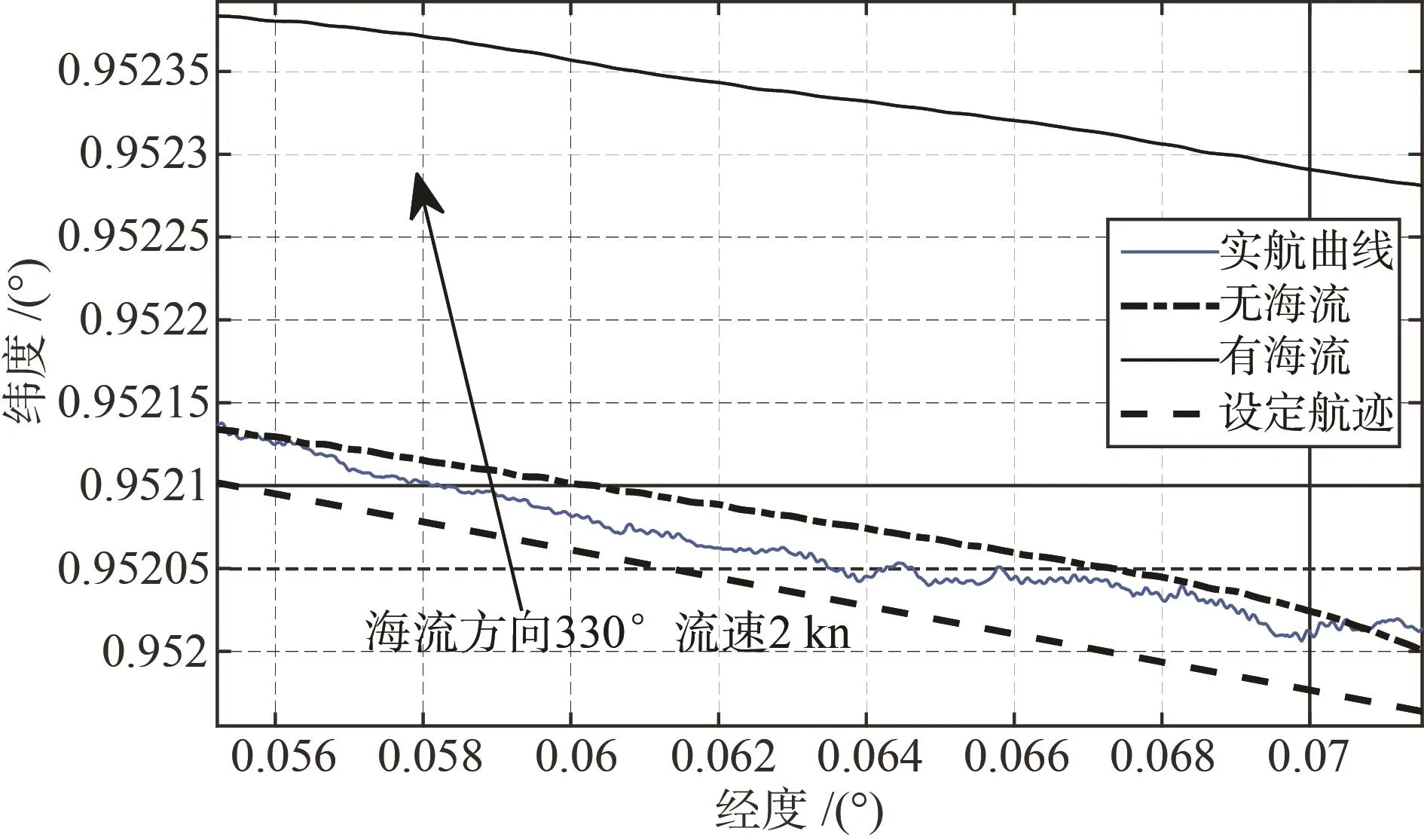
圖4 第一航段驗證軌跡對比曲線Fig.4 Comparison curve of the first trajectory
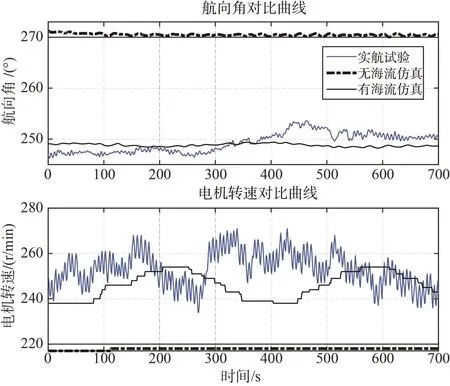
圖5 第一航段驗證航向角、電機轉速對比曲線Fig.5 Comparison curve of heading angle and motor speed in the first voyage
3.3 第二航段驗證
第二航段試驗工況設置如表3所示,試驗結果曲線見圖 6-7。第二航段航線角 114°,海流方向325°,介于側向流和逆向流之間。由圖6可見:實航試驗時UUV按照設定航跡航行;有海流仿真試驗中UUV軌跡與設定航線保持一定距離且偏向海流的流向。由圖7可見:無海流仿真時,UUV航向角約 114°,與設定航線角一致,電機轉速約220 r/min,與湖試中實測數據相同。有海流仿真試驗的航向角在 125°~130°之間,電機轉速在300~330 r/min波動,與實航試驗中的內記數據一致。
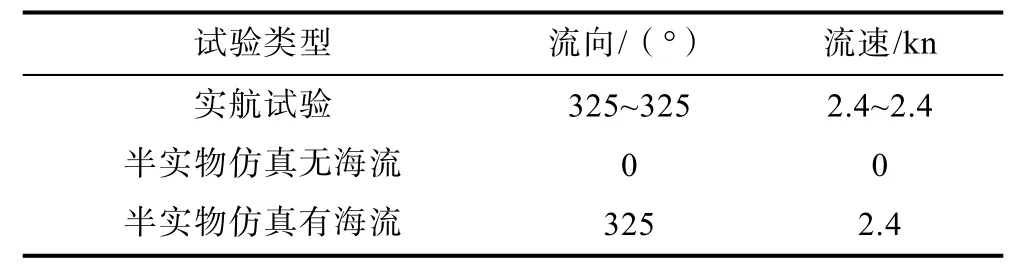
表3 第二航段驗證試驗工況設置Table 3 Settings of validation conditions for the second voyage
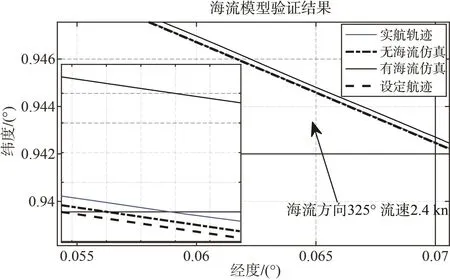
圖6 第二航段驗證軌跡對比曲線Fig.6 Comparison curve of the second voyage
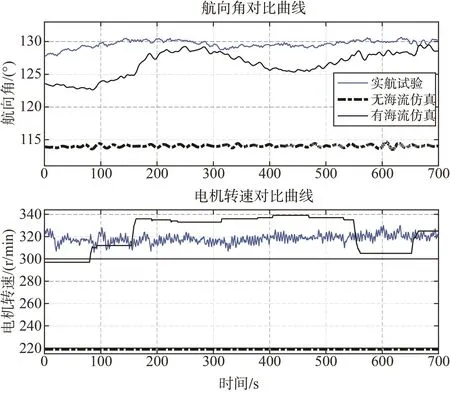
圖7 第二航段驗證航向角、電機轉速對比曲線Fig.7 Comparison curve of heading angle and motor speed in the second voyage
3.4 第三航段驗證
第三航段試驗工況設置如表4所示,試驗結果曲線見圖 8-9。第三航段航線角 90°,海流方向337°,屬于側向流,但是來流方向與第一航段剛好相反。由圖8可見:實航試驗時UUV按照設定航跡航行;有海流仿真試驗中UUV軌跡與設定航線保持一定距離(約 25 m)且偏向海流的流向。由圖9可見:無海流仿真時,UUV航向角約90°,與設定航線角一致,電機轉速約 222 r/min,與湖試中實測數據相近。有海流仿真試驗中UUV為抵抗海流,航向角約110°,航線角與航向角相差20°,第一航段相差21°,高度吻合;電機轉速在233 r/min附近波動,與實航試驗中的內記數據一致。
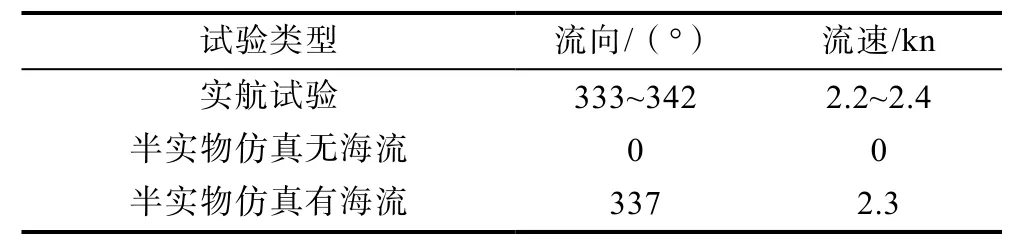
表4 第三航段驗證試驗工況設置Table 4 Settings of validation conditions for the third voyage
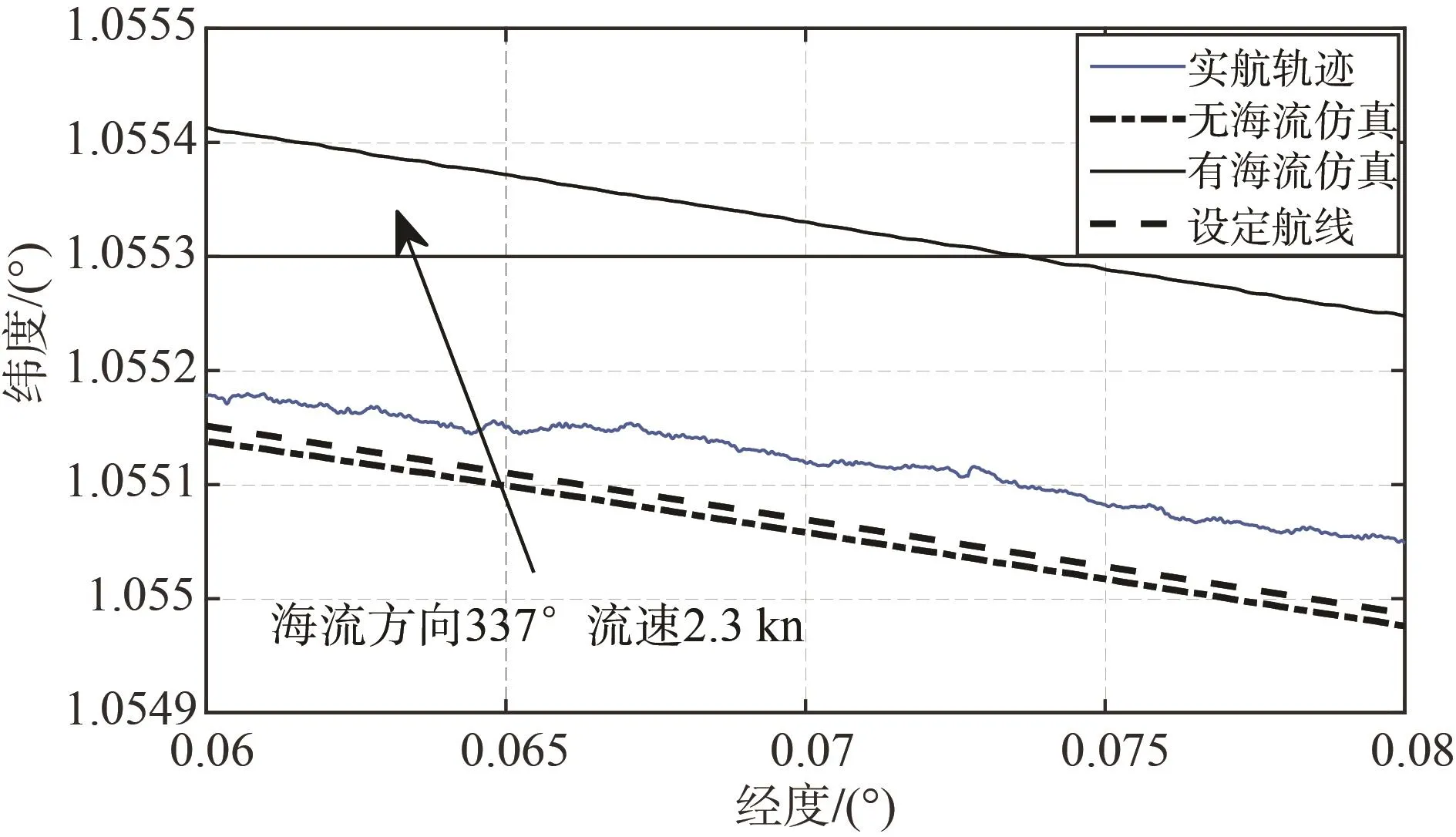
圖8 第三航段驗證軌跡對比曲線Fig.8 Comparison curve of the third voyage
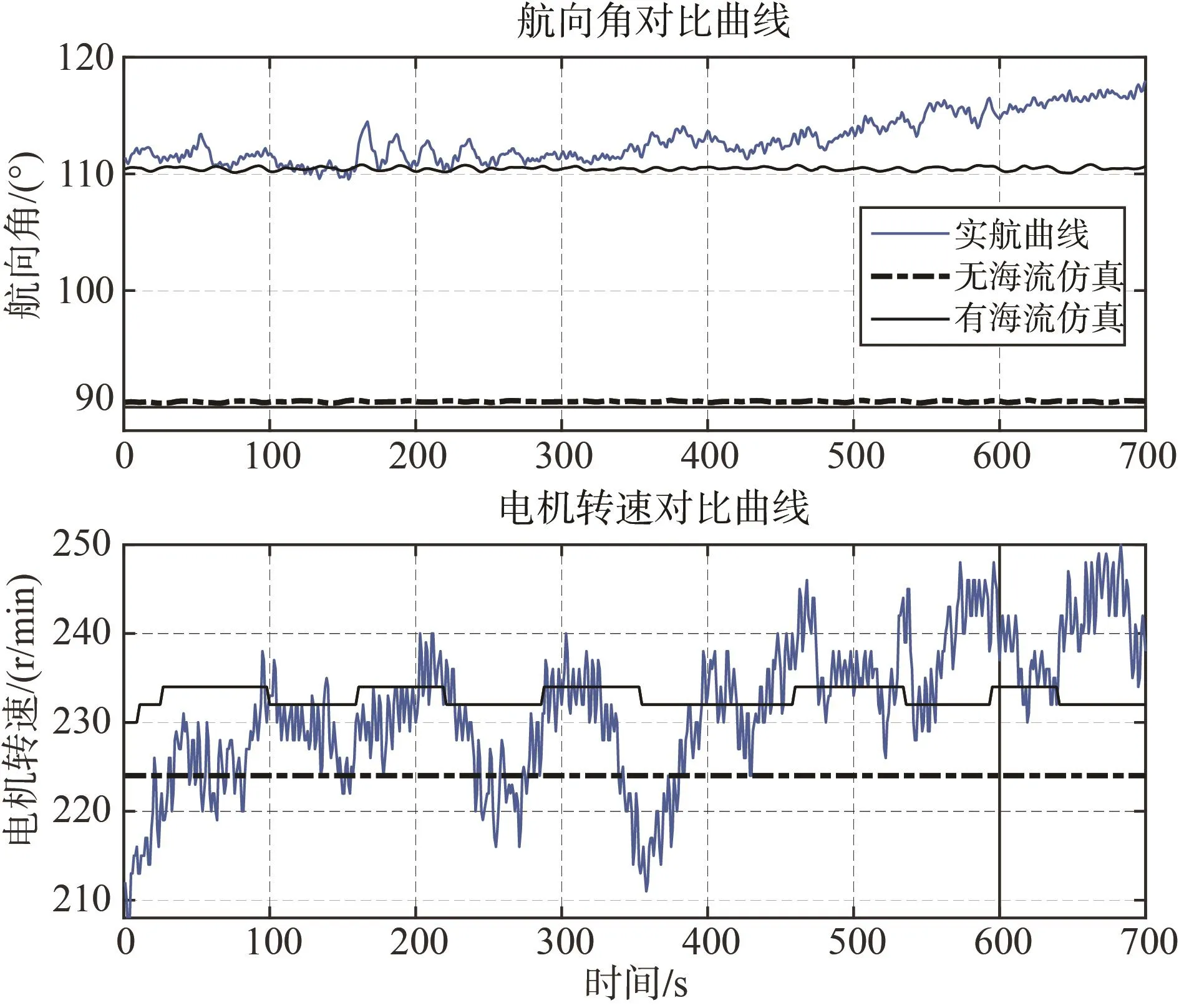
圖9 第三航段驗證航向角、電機轉速對比曲線Fig.9 Comparison curve of heading angle and motor speed in the third voyage
3.5 第四航段驗證
第四航段試驗工況設置如表5所示,試驗結果曲線見圖10-11。第四航段航線角310°,海流方向350°,介于順流和側向來流之間。由圖 10可見:實航試驗時,UUV按照設定航跡航行;有海流仿真試驗中UUV軌跡與設定航線保持一定距離且偏向海流的流向。由圖11可見:無海流仿真時,UUV航向角約 328°,與設定航線角一致,電機轉速約222 r/min,與湖試中實測數據相近。有海流仿真試驗中UUV航向角約311°,與實航試驗中實測航向角 310°一致;由于順流,有海流仿真試驗中電機轉速下降,在175~190 r/min附近波動,與實航試驗中的內記數據一致。
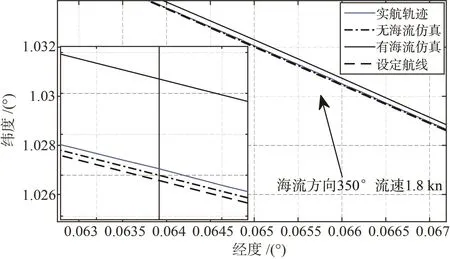
圖10 第四航段驗證軌跡對比曲線Fig.10 Comparison curve of the fourth voyage
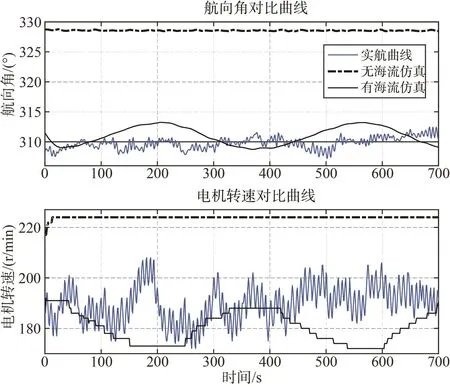
圖11 第四航段驗證航向角、電機轉速對比曲線Fig.11 Comparison curve of heading angle and motor speed in the fourth voyage
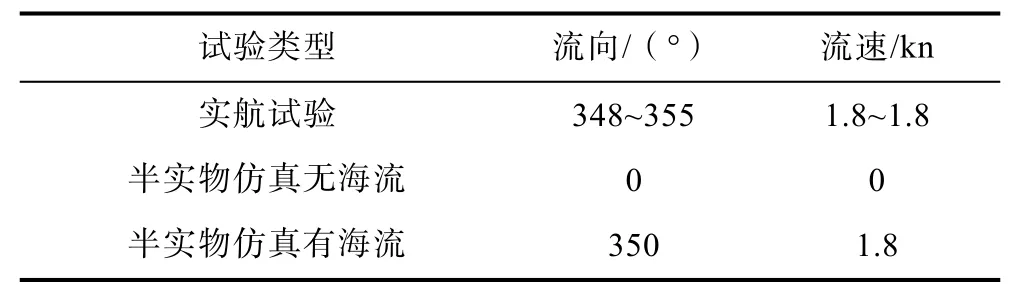
表5 第四航段驗證試驗工況設置Table 5 Settings of validation conditions for the fourth voyage
3.6 第五航段驗證
第五航段試驗工況設置如表6所示,試驗結果曲線見圖12-13。第五航段航線角182°,海流方向350°,屬于逆流航行。由圖12可見:實航試驗時,UUV按照設定航跡航行;有海流仿真試驗中UUV軌跡與設定航線保持一定距離且偏向海流的流向。由圖13可見:無海流仿真時,UUV航向角約182°,與設定航線角一致,電機轉速約 222 r/min,與湖試中實測數據相近。有海流仿真試驗中UUV航向角約187°;電機轉速約272 r/min,與實航試驗中的內記數據一致。
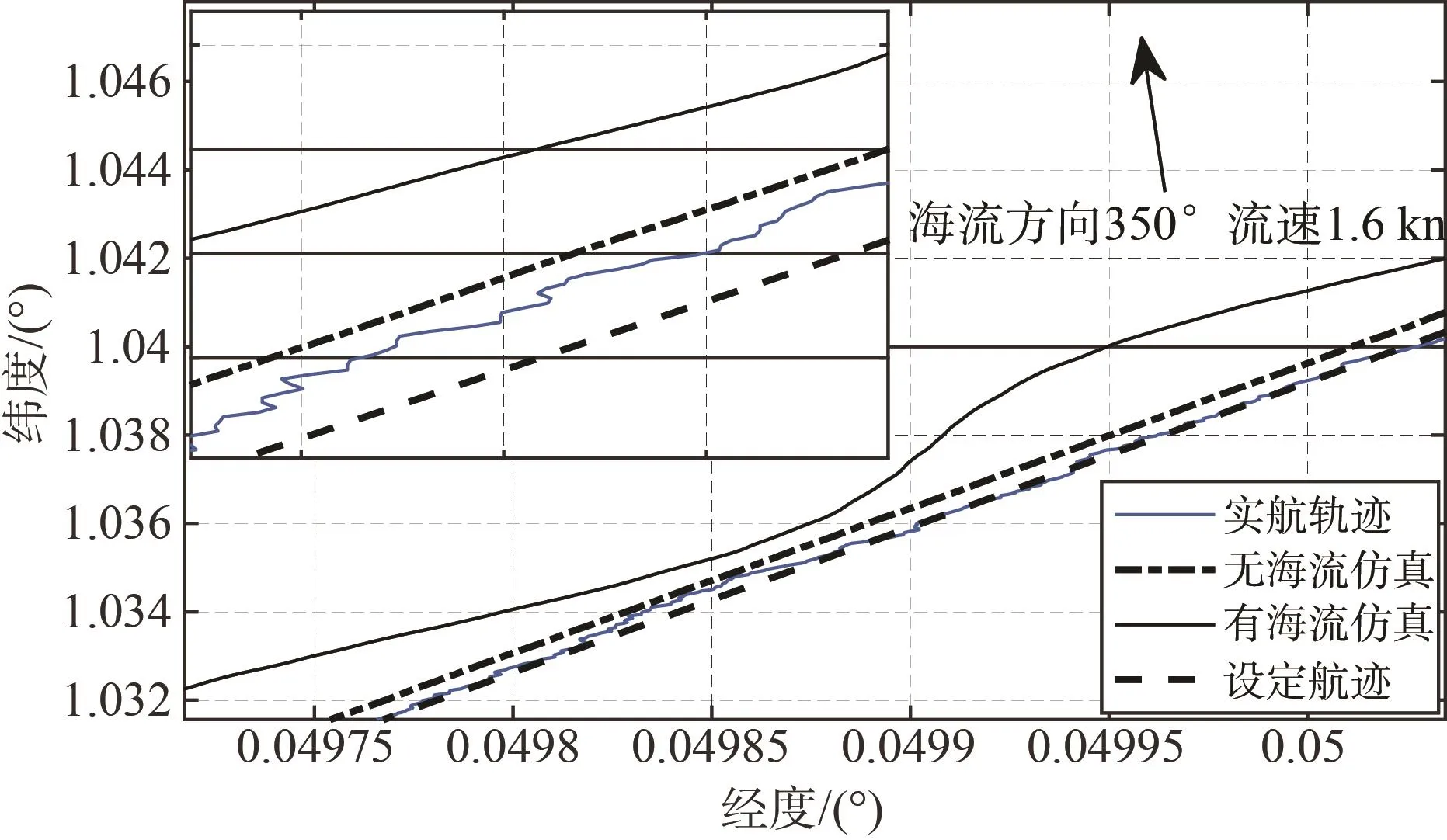
圖12 第五航段驗證軌跡對比曲線Fig.12 Comparison curve of the fifth voyage
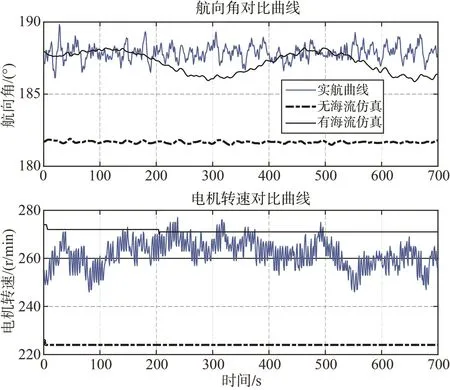
圖13 第五航段驗證航向角、電機轉速對比曲線Fig.13 Comparison curve of heading angle and motor speed in the fifth voyage
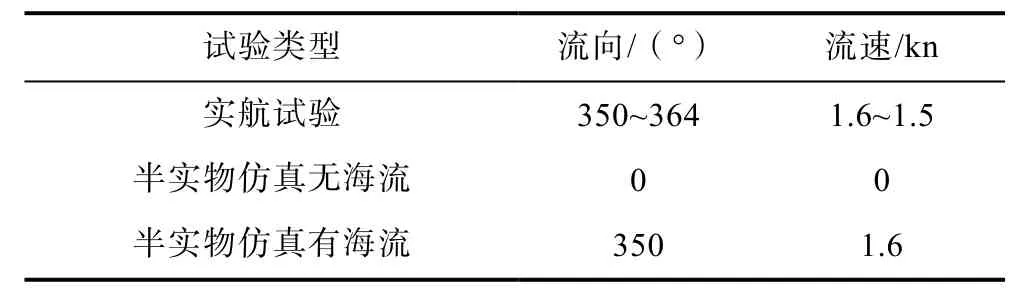
表6 第五航段驗證試驗工況設置Table 6 Settings of validation conditions for the fifth voyage
4 結束語
本文在UUV試驗過程中采用流速剖面儀實時采集記錄海流信息及UUV狀態信息,在實航試驗基礎上分別設計了無海流、有海流的半實物仿真對比試驗,對海流動力學模型的準確性進行了評估。得到如下結論。
1)實航試驗中,水平面內的海流主要影響UUV的經緯度、航向角和速度(如果是定航速控制則影響電機轉速);
2)仿真過程中海流模型對 UUV模型的航向角、速度影響與實際海流對UUV的航向角、速度影響一致;
3)實航試驗中海流影響UUV經緯度,使UUV位置偏向海流方向,實測位置偏差約 2~4 m;仿真過程中UUV位置偏向海流方向10~30 m,與海流與航線之間的夾角有關,側向海流時位置偏差更大。
當然閉環仿真中仿真結果的影響因素較多,動力學模型中疊加海流速度后導致UUV模型側滑角超出UUV模型設定范圍,也可能導致模型準確度下降,海流模型造成仿真軌跡誤差大的根本原因及改進方法還需要進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19