修正Kalman濾波技術(shù)在復(fù)雜環(huán)境DVL標(biāo)定中的應(yīng)用研究
2021-09-08 08:19:44郭新江
數(shù)字海洋與水下攻防 2021年4期
關(guān)鍵詞:環(huán)境
尚 佳,郭新江
(中國(guó)船舶重工集團(tuán)有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
聲學(xué)多普勒計(jì)程儀(Acoustic Doppler Velocity Log,DVL)是利用多普勒效應(yīng)原理,通過估計(jì)海底/水聲學(xué)散射信號(hào)的多普勒信息,測(cè)量平臺(tái)對(duì)底/水三維速度的一種精密儀器,廣泛應(yīng)用于水中裝備、水下作業(yè)、海洋觀測(cè)、艦船導(dǎo)航等領(lǐng)域,是現(xiàn)代水下自主導(dǎo)航系統(tǒng)的重要組成[1-4]。在實(shí)際工程應(yīng)用過程中,由于受機(jī)械加工、平臺(tái)安裝等誤差因素影響,造成DVL測(cè)量坐標(biāo)系與載體坐標(biāo)系之間存在安裝偏角、DVL測(cè)量值與真值之間存在比例因子,這些是水下自主導(dǎo)航精度的主要誤差源,需要進(jìn)行誤差預(yù)標(biāo)定。
目前的標(biāo)定方法多是在DVL測(cè)速噪聲為高斯分布假設(shè)下,利用最小二乘、羅德里格、奇異值分解等方法進(jìn)行標(biāo)定[5-9]。然而任何聲吶性能均與應(yīng)用環(huán)境密切相關(guān),DVL測(cè)速質(zhì)量易受到平臺(tái)、海洋等環(huán)境因素影響,在某些惡劣條件下,如長(zhǎng)江三峽、湖北水布埡等試驗(yàn)水域,部分航段異常值多、測(cè)速噪聲統(tǒng)計(jì)特性偏離高斯分布,嚴(yán)重影響標(biāo)定效果。因此,如何提高誤差標(biāo)定的穩(wěn)健性和作業(yè)效率是批量應(yīng)用中迫切需要解決的實(shí)際問題。本文著重針對(duì)復(fù)雜環(huán)境下 DVL標(biāo)定問題,提出采用修正Kalman濾波對(duì)非高斯測(cè)速噪聲加以抑制,彌補(bǔ)標(biāo)準(zhǔn)Kalman濾波在數(shù)據(jù)預(yù)處理方面的不足,擴(kuò)展現(xiàn)有標(biāo)定方法適用范圍,為工程應(yīng)用提供指導(dǎo)。
1 測(cè)速數(shù)據(jù)分析
Levy分布具有“尖峰肥尾”的形狀,可以分解為一個(gè)高斯白噪聲和一些大值樣本2部分;在平臺(tái)搖擺、地勢(shì)起伏等幅度較大情況下,DVL測(cè)量結(jié)果中會(huì)出現(xiàn)大異常觀測(cè)值,測(cè)速噪聲可認(rèn)為是由正常觀測(cè)的高斯噪聲與異常樣本組成,符合 Levy分布特點(diǎn)。
結(jié)合國(guó)產(chǎn)HEU150型DVL在長(zhǎng)江三峽應(yīng)用為例,以GPS速度為真值,DVL速度減去GPS速度獲得的測(cè)速噪聲為研究對(duì)象,分別采用直接曲線擬合、高斯分布擬合和Levy分布擬合方法對(duì)約2萬個(gè)測(cè)速樣本的統(tǒng)計(jì)特性進(jìn)行分析。對(duì)于地勢(shì)相對(duì)平坦的非復(fù)雜作業(yè)環(huán)境,圖1為DVL和GPS輸出速度曲線;圖2為噪聲統(tǒng)計(jì)特性,其中高斯分布的擬合參數(shù)為 N(σ=0,σ2=0.087),Levy分布的擬合參數(shù)α=1.8,C=0.01,β=0.053,δ=0。可以看出:在相對(duì)理想環(huán)境下,實(shí)際噪聲統(tǒng)計(jì)特性可用高斯分布近似描述。對(duì)于地勢(shì)相對(duì)陡峭的復(fù)雜作業(yè)環(huán)境,圖3為某地勢(shì)陡峭航段的DVL和GPS輸出速度曲線,由于該航段兩側(cè)地形最大起伏超過30°,導(dǎo)致部分區(qū)間測(cè)速異常值明顯,DVL測(cè)速噪聲明顯不符合高斯分布;圖4描述了實(shí)證數(shù)據(jù)的噪聲統(tǒng)計(jì)特性,為了達(dá)到最佳擬合效果,本文將高斯分布的擬合參數(shù)設(shè)為 N(σ=0,σ2=0.387 6),Levy分布的擬合參數(shù)設(shè)為α=1.23,C=0.11,β=-0.037,δ=0.043,可以看出:實(shí)際噪聲概率密度函數(shù)的尾部比相同均值和方差的高斯分布更厚,進(jìn)一步說明了實(shí)際噪聲不符合高斯分布。且如果將高斯分布的σ值調(diào)小,使其峰值與實(shí)際噪聲的概率密度匹配,則高斯分布的數(shù)據(jù)分布會(huì)更加集中,其數(shù)據(jù)范圍還是從分布范圍的角度觀測(cè),Levy分布顯然能夠更加精確地?cái)M合噪聲樣本數(shù)據(jù)。另一方面,如果選用尾部厚度及峰值均與實(shí)證更加相似的Levy分布,標(biāo)準(zhǔn)Kalman濾波的精度和穩(wěn)定度則得以更好的保證,因此本文選用Levy分布來更準(zhǔn)確地適配實(shí)際噪聲分布。

圖1 非復(fù)雜作業(yè)環(huán)境下測(cè)速樣本Fig.1 Velocity measurement sample in non-complex working environment

圖2 非復(fù)雜作業(yè)環(huán)境下樣本噪聲統(tǒng)計(jì)特性Fig.2 Statistical characteristics of noise samples in non-complex working environment

圖3 復(fù)雜作業(yè)環(huán)境下西陵峽某航段測(cè)速樣本Fig.3 Velocity measurement sample of a section of Xiling Gorge in complex working environment

圖4 復(fù)雜作業(yè)環(huán)境下樣本噪聲統(tǒng)計(jì)特性Fig.4 Statistical characteristics of noise samples in complex working environment
2 基于Kalman濾波的測(cè)速數(shù)據(jù)預(yù)處理
2.1 標(biāo)準(zhǔn)Kalman濾波
卡爾曼濾波(Kalman filtering)是一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測(cè)數(shù)據(jù),對(duì)系統(tǒng)狀態(tài)在最小均方誤差準(zhǔn)則進(jìn)行最優(yōu)估計(jì)的算法[10]。設(shè)線性離散系統(tǒng)的狀態(tài)和量測(cè)方程分別為
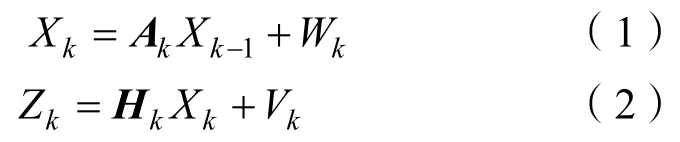
式中:Xk為狀態(tài)量;Ak為狀態(tài)轉(zhuǎn)移矩陣;Wk為狀態(tài)噪聲;Zk為量測(cè)值;Hk為測(cè)量矩陣;Vk為測(cè)量噪聲。若Wk和Vk滿足
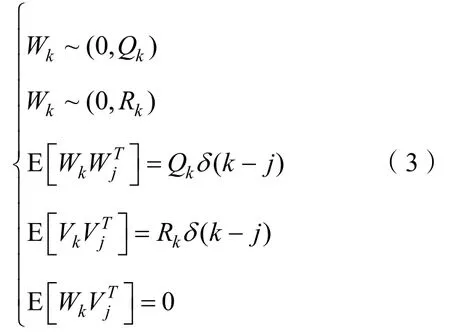
則Kalman濾波處理流程如圖5所示。然而根據(jù)測(cè)速噪聲統(tǒng)計(jì)分析結(jié)果,非高斯Levy分布更適合對(duì)復(fù)雜環(huán)境測(cè)速噪聲描述,限制了標(biāo)準(zhǔn) Kalman濾波應(yīng)用效果。
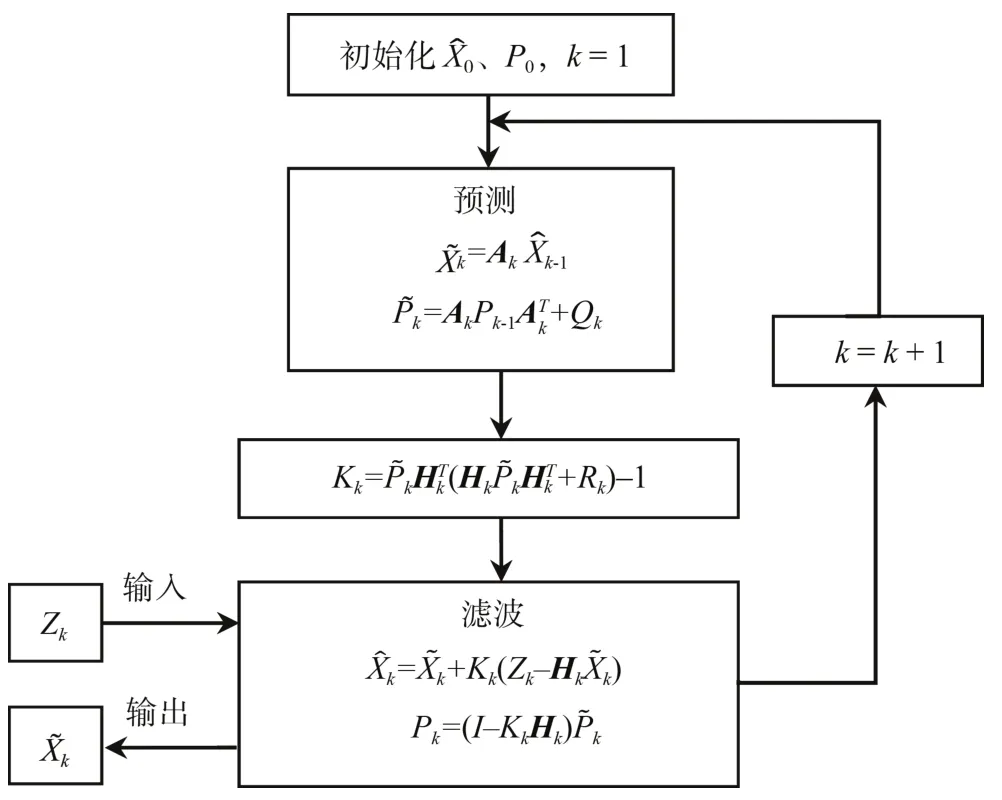
圖5 標(biāo)準(zhǔn)Kalman濾波處理流程Fig.5 Standard flow of Kalman filter processing
2.2 修正Kalman濾波
修正 Kalman濾波是通過門限來剔除野值樣本,將服從Levy分布的噪聲轉(zhuǎn)化為高斯噪聲;在此基礎(chǔ)上,通過實(shí)時(shí)估計(jì)測(cè)量噪聲方差來改變?yōu)V波增益,以減小異常數(shù)據(jù)對(duì)Kalman濾波的影響,其處理流程如圖6所示[11-13]。

圖6 修正Kalman濾波處理流程Fig.6 Flow of modified Kalman filter processing
仍以圖1-2樣本為例,標(biāo)準(zhǔn)Kalman濾波和修正Kalman濾波預(yù)處理效果如圖7-8所示,可以明顯看出:修正 Kalman濾波預(yù)處理方法效果最優(yōu),野值數(shù)據(jù)得到有效剔除;而標(biāo)準(zhǔn) Kalman濾波無論是在野值剔除方面,還是數(shù)據(jù)實(shí)時(shí)跟蹤上均出現(xiàn)不同程度的錯(cuò)誤結(jié)果,這會(huì)嚴(yán)重影響標(biāo)定效果。
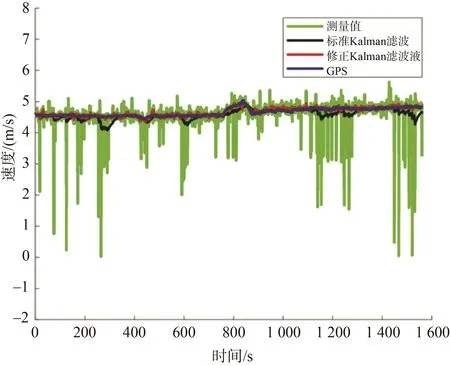
圖7 修正Kalman濾波預(yù)處理結(jié)果Fig.7 Modified Kalman filter preprocessing results
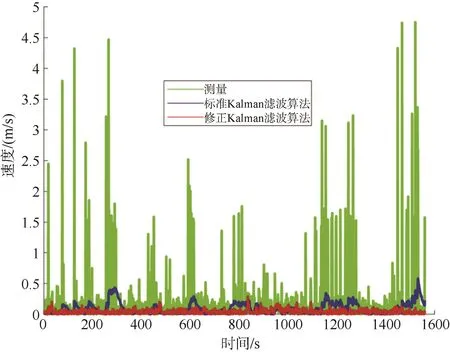
圖8 估計(jì)誤差Fig.8 Estimation error
3 標(biāo)定試驗(yàn)
3.1 標(biāo)定過程
為驗(yàn)證基于修正Kalman濾波預(yù)處理的外場(chǎng)標(biāo)定效果,本文采用經(jīng)典平均速度法進(jìn)行安裝偏角和比例因子標(biāo)定。HEU150型 DVL的標(biāo)稱精度為5‰±2 mm/s,為分體式結(jié)構(gòu)設(shè)計(jì);換能器通過升降平臺(tái)剛性懸掛在船舷側(cè),為減小桿臂效應(yīng)影響,將GPS接收天線架設(shè)在升降平臺(tái)頂端,標(biāo)定設(shè)備示意圖如圖9所示。采用VeriPose星站差分接收機(jī)提供高精度速度基準(zhǔn);航向信息由國(guó)產(chǎn)某型慣性導(dǎo)航設(shè)備提供,航向角誤差為0.1°(1σ)。

圖9 DVL標(biāo)定設(shè)備示意圖Fig.9 Schematic diagram of DVL calibration equipment
選取開闊水域,實(shí)驗(yàn)船勻速直線航行,航向過程中要求勻速直測(cè)速線航程不小于2 n mile[14]、航向控制誤差在1°以內(nèi),試驗(yàn)標(biāo)定航跡示意圖如圖10所示,具體過程如下:

圖10 標(biāo)定航跡示意圖Fig.10 Schematic diagram of calibration track
1)實(shí)驗(yàn)船以經(jīng)濟(jì)航速航行至A點(diǎn)就位,保持主機(jī)轉(zhuǎn)速恒定,至 A1點(diǎn)時(shí)正式開始標(biāo)定試驗(yàn),其中AA1點(diǎn)為航速穩(wěn)定區(qū)間,要求不少于200 m。
2)保持主機(jī)轉(zhuǎn)速和航跡向穩(wěn)定,繼續(xù)沿直線航行至B點(diǎn),標(biāo)定結(jié)束,其中A1B點(diǎn)為航速標(biāo)定區(qū)間;若需要獲取多個(gè)標(biāo)定樣本,可繼續(xù)航行至B1點(diǎn)后轉(zhuǎn)向,并重復(fù)上述過程。
3)讀取數(shù)據(jù)進(jìn)行數(shù)據(jù)處理,按下式計(jì)算標(biāo)定系數(shù)與安裝偏角。

式中:VGPS為GPS平均合速度;VDVL為DVL平均合速度;VDX為 DVL測(cè)得的縱向速度(沿船艏方向);VDY為DVL測(cè)得的橫向速度(沿船右舷方向);VGX為GPS測(cè)得的沿北方向速度;VGY為 GPS測(cè)得的沿東方向速度;α為船的航向角。
3.2 標(biāo)定結(jié)果
選取西陵峽水域的10個(gè)非有效標(biāo)定樣本進(jìn)行分析,結(jié)果如表1所示。可以看出:在數(shù)據(jù)樣本不理想的情況下,通過修正Kalman濾波預(yù)處理后的校定結(jié)果明顯優(yōu)于標(biāo)準(zhǔn)Kalman濾波預(yù)處理,比例因子由 0.210 2%減小到 0.055 2%、安裝偏角由1.440 1°減小到0.271 5°,一致性較好,更能夠反映真實(shí)安裝偏角和比例因子變化情況,有效降低了平臺(tái)對(duì)實(shí)驗(yàn)環(huán)境的要求,提高了校準(zhǔn)效率。
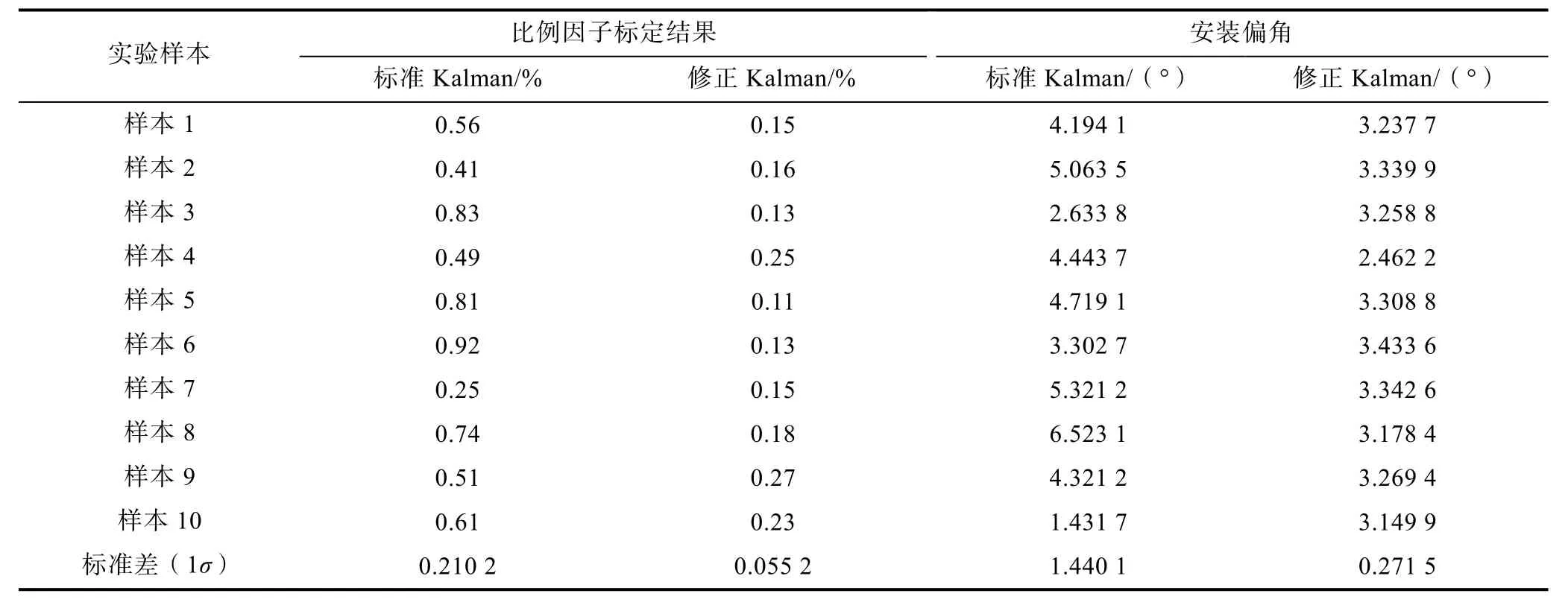
表1 兩種預(yù)處理方法標(biāo)定結(jié)果對(duì)比Table 1 Comparison of calibration results of tow preprocessing methods
4 結(jié)束語(yǔ)
本文針對(duì)惡劣作業(yè)條件下的聲學(xué)多普勒計(jì)程儀標(biāo)定問題進(jìn)行了分析討論,提出了一種基于修正Kalman濾波預(yù)處理的誤差校準(zhǔn)方法,通過分析真實(shí)數(shù)據(jù)統(tǒng)計(jì)分布、并與標(biāo)準(zhǔn)Kalman濾波預(yù)處理方法的校準(zhǔn)性能進(jìn)行了比對(duì),得到如下結(jié)論:
1)在復(fù)雜惡劣應(yīng)用環(huán)境下,聲學(xué)多普勒計(jì)程儀測(cè)速數(shù)據(jù)更符合Levy統(tǒng)計(jì)分布規(guī)律,傳統(tǒng)基于高斯噪聲假設(shè)的數(shù)據(jù)預(yù)處理方法不再適用。
2)通過修正 Kalman濾波預(yù)處理后的標(biāo)定結(jié)果更加穩(wěn)健,降低了平臺(tái)對(duì)實(shí)驗(yàn)環(huán)境的要求,提高了校準(zhǔn)效率。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語(yǔ)備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語(yǔ)·新策略(2019年9期)2019-10-17 01:51:34
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
中國(guó)生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(bào)(2017年2期)2017-04-20 08:44:31
中國(guó)環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國(guó)商論(2016年33期)2016-03-01 01:59:38