內蒙古興安盟基于激光測距的作物冠層高度研究現狀
2021-09-06 02:20:22高春香楊玉輝
中國農學通報 2021年22期
關鍵詞:測量
高 雷,高春香,楊玉輝
(1興安盟扎賚特旗氣象局,內蒙古興安盟扎賚特旗137600;2內蒙古自治區氣候中心,呼和浩特010051)
0 引言
目前,中國的農作物觀測技術還相對落后,冠層高度的測量還是以人工測量為主,此方法費時費力,難以對作物進行實時連續測量,且測量數據誤差大、時效性差。隨著現代電子、通訊和計算機技術的發展,冠層高度的自動化測量也取得了不少進展,但仍有很多不足。
1995年Shimizu等[1]設計了包含CCD攝像機和紅外照明器具的計算機視覺系統,對植株進行非接觸式、立體生長分析。但是該方法對實驗環境的要求太高,無法在實際農田對植株長勢進行連續性監測。2004年高巍等[2]介紹了一種非接觸式的作物高度測量裝置。該裝置將超聲波測距傳感器安置在裝置上方,通過垂直向下發射超聲波獲取作物冠層與傳感器之間的距離,進而推算出作物的高度。但該裝置僅能對傳感器正下方的作物進行高度測量,且超聲波測距傳感器本身存在反射、噪音、交叉等問題,也會對測量結果產生影響。2008年武傳宇等[3]研發了一種作物植株高度的硬件裝置。它利用光電掃描系統連續掃描農作物,并采用自上而下的方式判斷光接收器的狀態,從而提取當前位置植株的邊緣高度數據。但該方法不適合進行長期自動測量,且使用的傳感器較多,價格高昂。2010年馬彥平[4]設計了一種基于雙目視覺的田間作物高度測量技術,并通過多標桿輔助的方式完成高度測量。但是過多的標桿會影響正常的農事活動,且該技術的硬件成本較高。余正泓[5]設計了一種新的作物自動測高裝置,該裝置利用微處理器控制伺服電機轉動,使其帶動紅外測距傳感器對作物進行自動掃描,完成冠層頂端的確定,同時超聲測距傳感器測出傳感器當前高度,完成高度測量的工作。但該裝置結構復雜,對安裝要求較高,大田環境下部件容易受損。
為了實現農業高質、高效、綠色可持續發展,內蒙古興安盟不斷加強作物長勢自動觀測系統建設并且成果顯著,大田作物冠層高度測量仍是作物長勢自動觀測的難點。早期傳統的測量方法是技術人員深入田間,測量幾個區域的平均高度值,工作量較大,測量結果容易受人為因素影響。之后又嘗試采用標桿法[6],通過圖像采集,對比標桿尺寸測量作物冠層高度,但是該方法測量局限性較大,只能通過標桿周圍苗的高度判斷整個區域苗冠層高度。另外,田間標桿影響正常農事活動,給機械化作業帶來諸多不便。針對上述方法存在的工作量大、測量精度低等問題,結合本地區作物情況,相繼嘗試了2種作物冠層高度識別方法,即基于作物圖像的冠層高度測量方法以及基于激光測距的冠層高度測量方法[7-8],尤其是基于激光技術的田間冠層高度測量技術,通過將激光測距儀安裝在三維旋轉云臺上,實現對觀測區域的動態掃描,獲取冠層位置點集,結合內角誤差修正、三角幾何換算、數據擬合等方法[9],得到作物冠層高度。并經過連續2年針對春玉米觀測試驗,最終驗證方法的有效性和可行性[10]。
1 測量方法
1.1 基于圖像的作物冠層高度識別[11]
本地區初期主要采用基于圖像的作物冠層高度識別方法,即利用單目相機實時采集作物的生長圖像,圖1所示即為對同一位置的春玉米植株在3種不同發育期(七葉期、拔節期、抽雄期)所拍攝的圖像。結合作物生長規律,通過圖像分割、圖像識別以及擬合算法,從圖像中計算出作物的冠層的高度信息[12]。該方法實現了對作物冠層高度遠程、自動連續測量,大大降低了觀測人員的勞動強度,較大程度地降低冠層高度識別裝置對農事活動的影響。但后期測量實驗結果表明,該方法由于采集的圖像本身只具有二維信息,缺少第三維信息,單純從圖像中對作物的冠層高度進行測量的準確度并不理想[13]。例如,在植株生長前期(圖1七葉期),若以根部為底點,無法沿著主莖找到其對應的冠層頂點,導致無法測量其高度;直接從圖像中判斷作物葉片的冠層最高點也不可行[14]。對于生長的中后期(圖1拔節期和抽雄期),由于植株葉片重疊嚴重,同樣沒有辦法對其冠層高度進行準確測量[15]。因此,在對作物冠層高度能夠實現遠程、自動連續測量的前提下,需要進一步借助其他硬件裝置來提高冠層高度的測量準確度[16]。
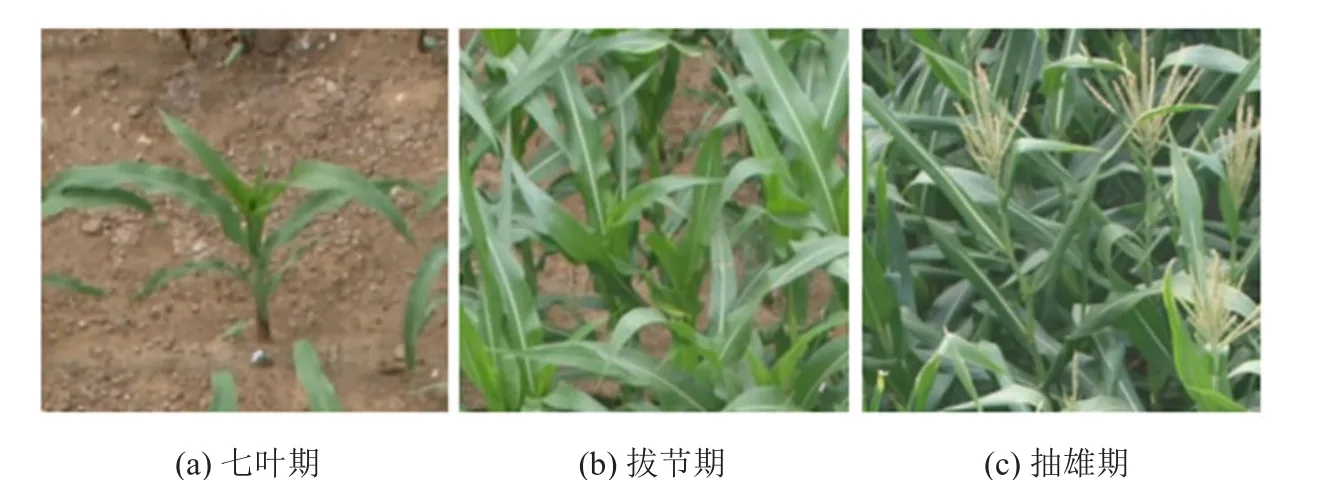
圖1 春玉米植株的不同發育期
1.2 基于激光測距的作物冠層高度識別
針對基于圖像的作物冠層高度識別方法存在的準確度問題[17],本地區之后采用了基于激光測距的作物冠層高度識別技術,該技術將激光測距儀安裝在三維旋轉云臺上,通過控制激光測距儀的發射角度,使測距儀按照一定的軌跡對作物冠層進行掃描測量,并對掃描結果進行內角誤差修正、三角幾何換算、數據擬合篩選處理后,得到作物冠層高度的最大值和平均值[18]。
圖2為基于激光測距的冠層高度自動測量裝置以及組成示意圖,裝置包括測量單元、采集和控制單元、數據處理中心和通訊單元;測量單元包括激光測距傳感器、重力感應傳感器和三維旋轉云臺;測量單元、采集和控制單元通過通訊單元與數據處理中心進行連接通信[19]。
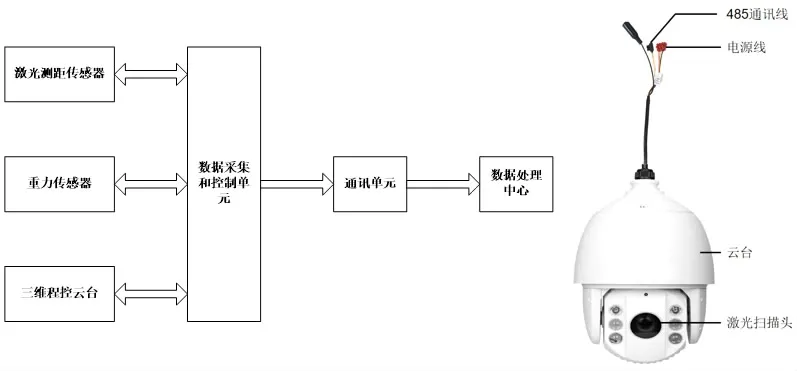
圖2 基于激光測距的冠層高度自動測量裝置以及組成示意圖
將帶有三維旋轉功能的激光測距儀安裝在待測量的農作物觀測站點,針對所測作物種類確定儀器安裝高度,并設定激光測距儀的掃描范圍;測量開始前,系統自動調整激光測距儀垂直正對地面,測出激光發射口距離地面的高度;根據設定的掃描范圍確定測距儀的掃描軌跡,確定激光測距儀掃描的起始位置和結束位置,系統從起始位置開始,根據上述確定的掃描軌跡,控制測距儀進行水平方向和垂直方向上的運動,并在每旋轉一定角度時進行一次測量,每次測量得到一個距離值、一個垂直旋轉角度和一個水平旋轉角度;測距儀垂直旋轉時,激光口距地高度會發生變化,為提高測量精度,可先利用內角誤差修正公式修正激光發射口高度,然后結合上述測量結果,通過三角幾何關系計算出當前掃描點的高度值[20]。儀器重復進行上述測量計算過程,直至測距儀旋轉至上述結束位置,測量結束獲得一個掃描周期內所有掃描點的高度序列,數據采集處理模塊對上述數據進行存儲和篩選,通過擬合運算等處理,最終得出當前測量區域內作物冠層高度的最大值和平均值[21]。
2 測量區域與結果分析
測量區域選擇了突泉縣,在該地區搭建了帶有三維旋轉功能的激光測距儀,如圖3所示,并選擇了春玉米作為觀測對象。從2018年開始使用激光測距儀對春玉米進行了連續2年的冠層高度自動測量,同時在相同日期相同觀測區域安排人工對玉米冠層進行觀測,其中2018、2019年觀測結果如表1~ 2所示。從表1和表2可以看出,在整個春玉米發育期(三葉、七葉、拔節、抽雄、乳熟、成熟),自動觀測高度和人工觀測高度誤差[22]在15 cm以內。其中發育期前期誤差相對較小[23](三葉、七葉),普遍在5 cm以內;發育期中期和后期相對大一點,在10 cm左右。這是由于隨著植株生長,植株重疊嚴重,會一定程度影響測量的準確性,但整體而言基于激光測距的高度識別技術不僅能夠實現對作物冠層高度的遠程、自動連續測量,在作物高度識別方面也展現出了較出色的識別準確度和識別效率,降低勞動強度的同時,也提高了測量效率和可靠性[24]。
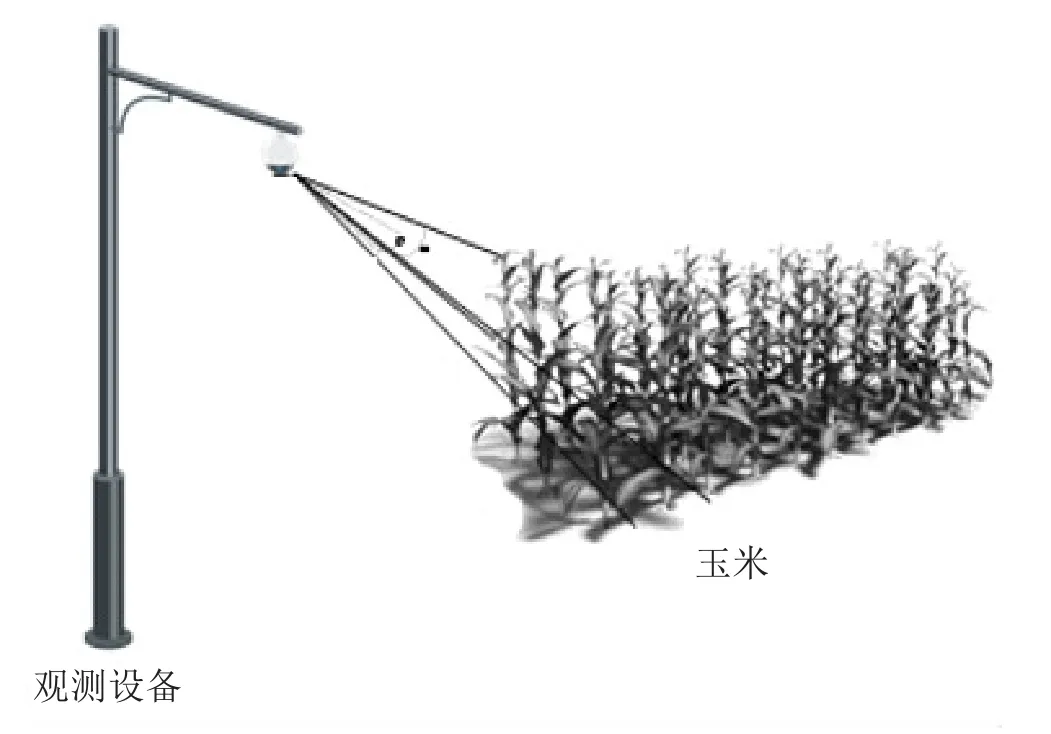
圖3 具有三維旋轉功能的激光測距儀
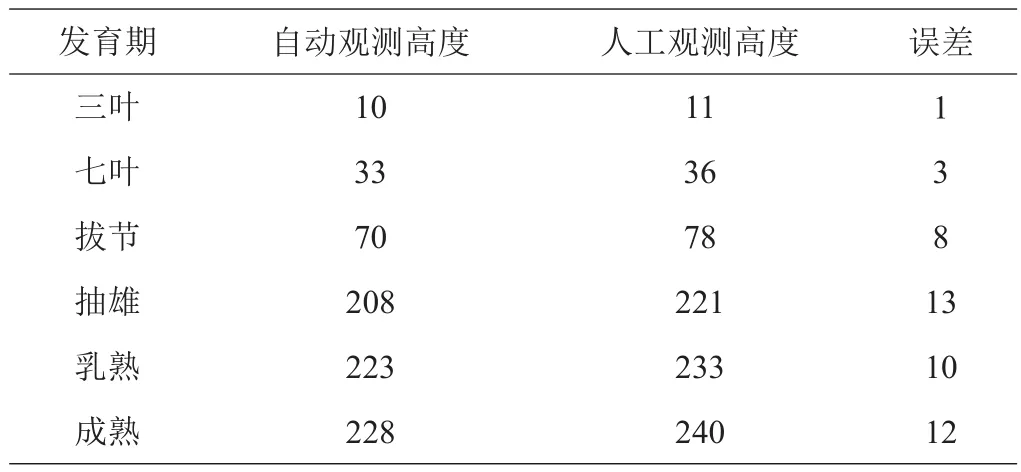
表1 2018年觀測結果 cm
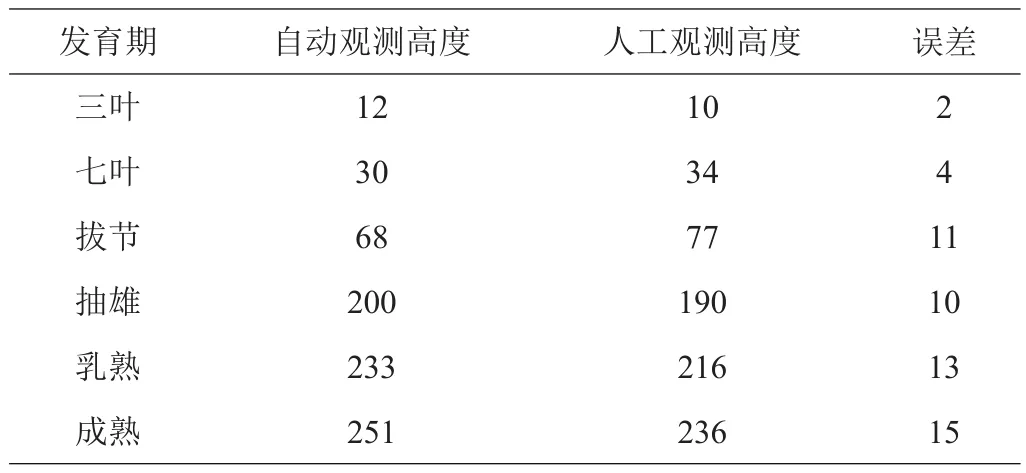
表2 2019年觀測結果 cm
3 結論與討論
本文主要論述了內蒙古興安盟作物冠層高度識別的研究現狀,介紹了本地區近年來在作物高度識別方面主要采取的2種識別方法,即基于圖像的作物冠層高度識別和基于激光測距的作物冠層高度識別[25]。并著重介紹了基于激光測距的作物冠層識別方法,該方法將激光測距儀安裝在三維旋轉云臺上,按照一定的軌跡對作物冠層進行掃描測量,經過內角誤差修正、三角幾何換算、數據擬合篩選處理后最終得到作物冠層高度。結合連續2年的觀測試驗,證明了該方法不僅能夠實現對作物冠層高度的遠程、自動連續測量,同時在作物高度識別方面展現出了較出色的識別準確度和識別效率,驗證了該方法在作物冠層高度識別上的可行性和有效性。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
