基于χ2故障檢驗(yàn)的氣壓高度修正算法
2021-09-05 11:42:58王瀟
電子設(shè)計(jì)工程 2021年17期
王瀟
(南京理工大學(xué)自動化學(xué)院,江蘇 南京 210094)
隨著無人機(jī)的逐步發(fā)展,無人機(jī)穿梭于各種復(fù)雜環(huán)境間,要求其滯空時(shí)間越來越長,對其導(dǎo)航系統(tǒng)的要求也越來越高,而高度信息是無人機(jī)導(dǎo)航系統(tǒng)的關(guān)鍵參數(shù)之一。由于純慣導(dǎo)的高度通道不能長時(shí)間單獨(dú)使用,必須借用其他高度測量設(shè)備,比如氣壓高度計(jì)對其進(jìn)行高度阻尼。通過氣壓計(jì)測量大氣靜壓力間接測量飛行器高度,但受地球大氣變化影響,大氣靜壓力始終處于波動狀態(tài),對測量的高度信息有一定的影響。但是,由于大氣變化比較緩慢,因此在短時(shí)間內(nèi)氣壓高度計(jì)測量精度較高。針對短時(shí)間內(nèi)氣壓波動緩慢這一特點(diǎn),文獻(xiàn)[1]中推導(dǎo)和分析了量度地球大氣壓強(qiáng)的近似公式,給出了壓強(qiáng)、溫度與高度之間的關(guān)系。在這一研究基礎(chǔ)上,眾多學(xué)者借用這一關(guān)系進(jìn)行了氣壓高度計(jì)的設(shè)計(jì),對在工程實(shí)踐中出現(xiàn)的各種問題提出了各種可行的修正方案。文獻(xiàn)[2]通過分析氣壓變化與溫度變化之間的關(guān)系,提出氣壓線性修正算法,通過選取合適的修正參數(shù)達(dá)到修正氣壓測量值的目的。為獲取所在位置的絕對海拔高度,提出了相應(yīng)的參考點(diǎn)修正算法,兩相結(jié)合在一定程度上取得了不錯(cuò)的效果。針對實(shí)際大氣狀態(tài)與標(biāo)準(zhǔn)大氣狀態(tài)不符造成的氣壓高度原理性誤差,文獻(xiàn)[3]中提出了一種多階全微分誤差修正算法,取得了不錯(cuò)的修正效果。文獻(xiàn)[4]中使用折線線性擬合法,將正常工作高度范圍分成了不同的多段,得到相應(yīng)的高度表,通過測得的壓力值在不同區(qū)間內(nèi)獲取相應(yīng)的海拔高度。
上述方法在短時(shí)條件下都能獲得準(zhǔn)確的高度信息,但隨著時(shí)間序列的增加,大氣壓力受地形、溫度、濕度、風(fēng)力、潮汐等一系列環(huán)境因素的影響,波動增大,會給高度計(jì)算引入原理性誤差,不利于高精度導(dǎo)航的實(shí)現(xiàn)。因此,需要尋找一種修正算法對長時(shí)間使用的氣壓高度計(jì)進(jìn)行修正,使其達(dá)到或接近短時(shí)精度。GPS能夠提供準(zhǔn)確的位置信息,但在近地面時(shí),其高度信息的準(zhǔn)確度相對較差,另外,其安全性也可能因受到干擾而得不到保障,因此文獻(xiàn)[5]提出GPS數(shù)據(jù)與氣壓計(jì)數(shù)據(jù)融合的高度濾波算法,巧妙利用兩者的優(yōu)點(diǎn),研制出一種組合高度系統(tǒng)。但在長時(shí)間導(dǎo)航過程中,氣壓高度計(jì)的原理性誤差依舊沒有得到很好的修正。該文采用χ2檢驗(yàn)法實(shí)現(xiàn)對氣壓傳感器的緩變故障檢測,然后結(jié)合狀態(tài)預(yù)測信息完成對氣壓高度計(jì)的修正,從而保障其長時(shí)工作精度。
1 氣壓高度測量原理
1.1 標(biāo)準(zhǔn)氣壓高度
在天向通道,大氣壓強(qiáng)與高度呈一定規(guī)律變化。氣壓高度計(jì)就是利用這一變化原理進(jìn)行設(shè)計(jì)的,使用氣壓傳感器測量大氣壓強(qiáng),根據(jù)高度與氣壓之間的關(guān)系間接計(jì)算高度。
高度的測量需要選取一個(gè)合適的氣壓基準(zhǔn)面,以便對高度數(shù)據(jù)的計(jì)算進(jìn)行統(tǒng)一。我國民航飛行高度的測量常用的氣壓基準(zhǔn)面有3種[6]:QNE(標(biāo)準(zhǔn)大氣壓)、QNH(修正海平面氣壓)和QFE(場面氣壓),分別用于計(jì)算標(biāo)準(zhǔn)氣壓高度、修正海平面氣壓高度和場壓高度。參考國際標(biāo)準(zhǔn)化組織制定的《國際標(biāo)準(zhǔn)ISO2533——標(biāo)準(zhǔn)大氣》,氣壓計(jì)測得的重力勢高度HATR和相應(yīng)大氣壓力PH之間的關(guān)系式為:

由于重力勢高度又稱標(biāo)準(zhǔn)氣壓高度,式(1)也可稱為標(biāo)準(zhǔn)氣壓高度公式。表1為式(1)中各個(gè)字母參數(shù)的含義。

表1 字母參數(shù)含義
采用國際標(biāo)準(zhǔn)大氣中對流層的氣體參數(shù),取β=-6.5×10-3K/m,Tb=288.15K,R=287.052 87 m2/K·s-2,Hb=0m,Pb=101.325 2 kPa,g=9.806 65 m·s-2。PH為氣壓計(jì)測量值,通過每次時(shí)間序列的更新測量即可獲得氣壓高度數(shù)據(jù)。
1.2 修正海壓高度
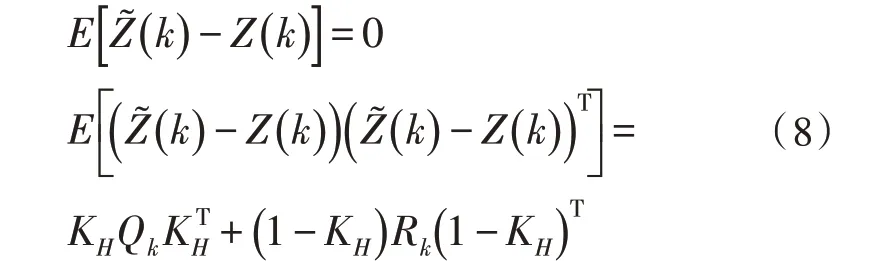
分析式(1)可知,在標(biāo)準(zhǔn)大氣下,氣壓計(jì)測得重力勢高度HATR是標(biāo)準(zhǔn)大氣靜壓PH的單值函數(shù)。但實(shí)際海平面大氣參數(shù)是動態(tài)變化的,隨著時(shí)間序列的遞增,與Tb和Pb產(chǎn)生很大的差別,此時(shí)氣壓高度計(jì)測得的高度數(shù)據(jù)計(jì)為,與標(biāo)準(zhǔn)大氣下重力勢高度HATR之間的誤差為:

由于參數(shù)動態(tài)變化,其產(chǎn)生的噪聲表示如下:
H0:短時(shí)(k≤n)噪聲

H1:長時(shí)(k>n)故障

從式(4)看出噪聲為有色噪聲,該噪聲受多種環(huán)境因素的影響,具有極強(qiáng)的非線性,不易補(bǔ)償。因此,依舊使用Tb和Pb進(jìn)行計(jì)算,會產(chǎn)生很大的原理性誤差,致使高度數(shù)據(jù)與實(shí)際高度不否,需要設(shè)計(jì)一種算法對其進(jìn)行修正。在使用式(1)進(jìn)行計(jì)算時(shí),可以通過溫度傳感器測量校正,采用修正海壓公式對進(jìn)行修正。根據(jù)先驗(yàn)知識,設(shè)修正海壓為:

其中,Hf(k)為QFE(k)對應(yīng)的海拔高度。初始校準(zhǔn)時(shí),用零時(shí)刻QFE(0)替換式(1)中的Pb,得到修正海壓。根據(jù)氣象觀測站給出的南京某地7天觀測數(shù)據(jù)修正海壓數(shù)據(jù),對a、b、c進(jìn)行參數(shù)估計(jì)。取a=9.81,b=82 699.05,c=-0.932 75。如圖1所示,虛線為氣象臺海壓數(shù)據(jù)曲線,實(shí)線為參數(shù)擬合海壓數(shù)據(jù)曲線。圖2為擬合誤差曲線,可知誤差在0.2 hPa左右,在誤差允許的范圍內(nèi),參數(shù)估計(jì)結(jié)果在誤差允許的范圍內(nèi)契合了當(dāng)?shù)貧庀笈_給出的數(shù)據(jù),可用于工程應(yīng)用。
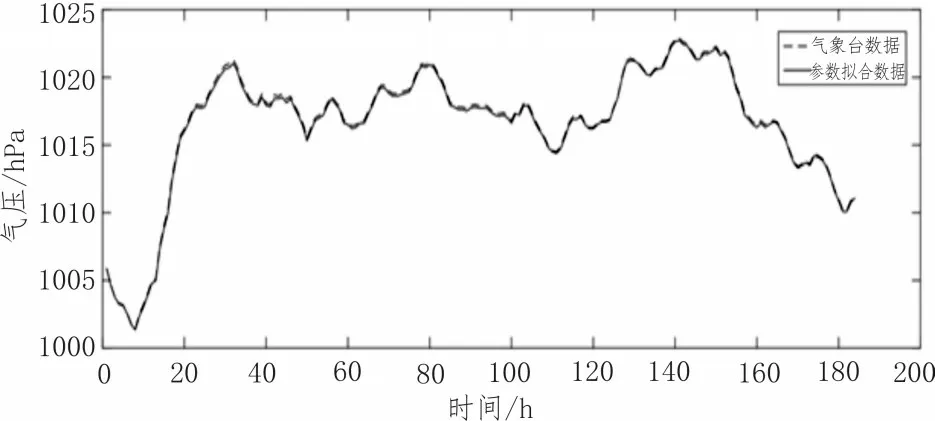
圖1 修正海壓算法
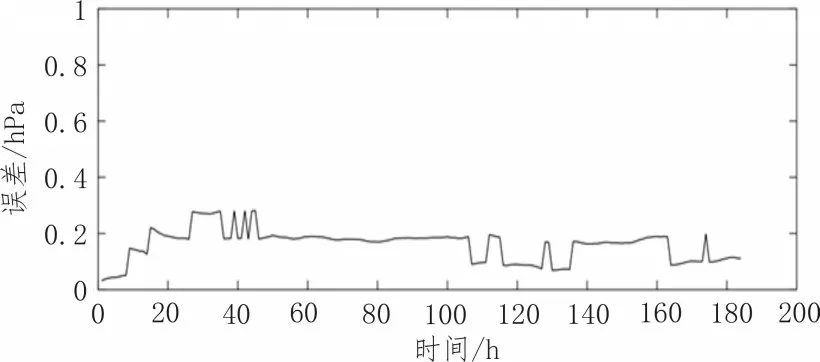
圖2 擬合誤差
在南京某地海拔高度為35.2 m的地方進(jìn)行數(shù)據(jù)采集,從圖3中的曲線走向可以看出,在初始階段,采用修正海壓法可以對高度數(shù)據(jù)起到短時(shí)的修正作用。但隨著時(shí)間的推移,由于修正海壓是固定的常值,大氣波動會給之后計(jì)算的高度數(shù)據(jù)引入很大的原理性誤差,誤差波動接近80 m,致使氣壓計(jì)高度數(shù)據(jù)在長時(shí)導(dǎo)航中失去了參考作用,無法滿足長時(shí)導(dǎo)航的高度通道精度需求。所以需要研究動態(tài)修正海壓算法,使修正海壓具有自適應(yīng)功能。所以研究GPS輔助的氣壓高度計(jì)具有重要意義。

圖3 修正海壓高度曲線
2 氣壓/GPS高度數(shù)據(jù)融合
為了提高氣壓計(jì)的測量精度,在進(jìn)行氣壓數(shù)據(jù)采集時(shí),需要進(jìn)行低通濾波處理,來減少噪聲的干擾。常采用RC低通濾波器的差分形式來表示,便于軟件編程,實(shí)現(xiàn)濾波功能。濾波[7]方程為:

PHK為該次濾波輸出值,Xk為當(dāng)前氣壓計(jì)測得數(shù)據(jù),PHk-1為上一時(shí)刻濾波輸出值,考慮系統(tǒng)的穩(wěn)定性和響應(yīng)速度,β可取0.25。
將濾波獲取的氣壓計(jì)數(shù)據(jù)帶入式(1)轉(zhuǎn)化為高度數(shù)據(jù),再與GPS高度數(shù)據(jù)進(jìn)行融合,獲取更為精準(zhǔn)的高度數(shù)據(jù)。

HGPS為GPS高度數(shù)據(jù),HATR為氣壓高度計(jì)高度數(shù)據(jù),Z為最終融合高度數(shù)據(jù),KH為權(quán)重,表示GPS高度數(shù)據(jù)與氣壓高度計(jì)數(shù)據(jù)的占比。假設(shè)GPS的數(shù)據(jù)存在零均值白噪聲,則融合后的噪聲可表示為:
H0:短時(shí)(k≤n)噪聲
H1:長時(shí)(k≤n)故障
GPS定位精度與接收機(jī)收到的衛(wèi)星數(shù)以及pDOP(三維位置精度因子)有關(guān)[7-10]。其之間的關(guān)系可描述為接收機(jī)接收到的GPS衛(wèi)星數(shù)越多,pDOP越小。pDOP值越小,通過GPS解算得到的位置信息越精確,通常其值小于6時(shí)為有效定位,小于3為理想狀態(tài)。設(shè)權(quán)重KH的計(jì)算公式為:

n為接收到的衛(wèi)星數(shù),p為pDOP值。GPS信號良好時(shí),pDOP值越小,KH值越大,此時(shí)GPS測量高度值所占比例越大,其數(shù)據(jù)獲得更多的信任,另外在長時(shí)導(dǎo)航系統(tǒng)中,融合后的數(shù)據(jù)穩(wěn)定性也要比氣壓高度計(jì)的數(shù)據(jù)穩(wěn)定性高。GPS信號較差時(shí),接收機(jī)接收到的衛(wèi)星數(shù)較少,pDOP較大,KH越小,誤差越大,此時(shí),高度融合值更加偏向氣壓計(jì)數(shù)據(jù)。此時(shí)可以保證在GPS或氣壓高度計(jì)出現(xiàn)問題時(shí),其融合輸出的高度數(shù)據(jù)收斂不發(fā)散。實(shí)驗(yàn)條件:在南京某地海拔高度為35.2 m的地方進(jìn)行測試,在空曠的場地,GPS接收機(jī)搜到的衛(wèi)星數(shù)n>10,pDOP在1.4左右,在有遮擋物(如高樓、樹等)的場地,GPS接收機(jī)搜到的衛(wèi)星數(shù)n<4,pDOP在4~8范圍內(nèi)波動。結(jié)果如圖4、5所示,GPS輔助的氣壓計(jì)高度系統(tǒng),GPS受到干擾時(shí),融合系統(tǒng)可以消除干擾,氣壓計(jì)數(shù)據(jù)波動時(shí),干擾雖已降低,但依舊會對融合的數(shù)據(jù)產(chǎn)生較大的影響,不能取得理想的實(shí)驗(yàn)效果。融合數(shù)據(jù)具有很大的信息量,考慮將其反作用于氣壓高度計(jì)系統(tǒng),修正氣壓高度計(jì)原理誤差,形成一個(gè)穩(wěn)定的閉環(huán)系統(tǒng)。
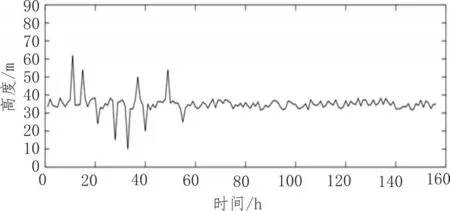
圖4 GPS高度曲線
3 氣壓高度計(jì)故障檢驗(yàn)
將氣壓高度計(jì)隨著環(huán)境波動產(chǎn)生的原理性誤差,視為故障,考慮一種合適的故障檢測法對其進(jìn)行監(jiān)測。故障發(fā)生后,需要對初始修正海壓進(jìn)行重新修正,使其適應(yīng)新的環(huán)境,從而實(shí)現(xiàn)修復(fù)故障的功能。
大氣靜壓是緩慢變化的,故其產(chǎn)生的故障為緩變量,GPS的故障可視為突變量,故可采用狀態(tài)遞推器的狀態(tài)χ2檢測法[11-16]對系統(tǒng)進(jìn)行故障檢測。通過構(gòu)造一個(gè)狀態(tài)遞推器,該狀態(tài)遞推器利用每隔一定時(shí)間的系統(tǒng)估計(jì)值作為遞推的先驗(yàn)信息進(jìn)行時(shí)間更新,而不進(jìn)行量測更新,因此不受故障信號的干擾[17]。該方法能及時(shí)發(fā)現(xiàn)系統(tǒng)的緩變故障,提高故障檢測靈敏度,保障氣壓高度計(jì)系統(tǒng)的安全性和可靠性[18-19]。設(shè)經(jīng)數(shù)據(jù)融合得到(k),其和氣壓高度計(jì)信息有關(guān),會受到系統(tǒng)故障的影響。(k)為狀態(tài)遞推器的輸出結(jié)果,可由k-n時(shí)刻遞推得來,不受系統(tǒng)故障影響。
估計(jì)誤差定義如下:


同時(shí)定義:

β(k)的方差表示為:

則故障檢測函數(shù)為:

故障判斷準(zhǔn)則如下:
若λ(k)>TD,判定系統(tǒng)有故障;
若λ(k)≤TD,判定系統(tǒng)無故障。
由式(7)、(10)可知,GPS突發(fā)故障可以被忽略,故系統(tǒng)出現(xiàn)故障時(shí),可以判定為氣壓高度計(jì)的緩變故障。故障判定后,對式(1)中的Pb進(jìn)行修正。選取合適的時(shí)間間隔n,假定k-n時(shí)刻系統(tǒng)正常工作,緩慢故障發(fā)生在間隔為n的時(shí)間段內(nèi),用Z1(k-n)修正式(5)中的Hf(k),代入當(dāng)前時(shí)刻測得的QFE(k),計(jì)算得到QNH(k),即為新的修正海壓Pb。經(jīng)過故障檢測算法修正的數(shù)據(jù)曲線如圖6、7所示。
從圖6可以看出,故障檢測后的氣壓高度計(jì)精度較圖3有明顯的改善。高度數(shù)據(jù)基本穩(wěn)定在30~40 m之間,誤差在5 m左右。圖7為經(jīng)過故障檢測數(shù)據(jù)融合后的結(jié)果,與單GPS高度數(shù)據(jù)相比(圖4),消除了GPS突變噪聲的影響;與無故障檢測數(shù)據(jù)融合結(jié)果(圖5)和故障檢測后的氣壓高度數(shù)據(jù)相比,輸出的高度數(shù)據(jù)更平穩(wěn),數(shù)據(jù)在35.2 m小范圍內(nèi)波動,最后結(jié)果驗(yàn)證了該算法的可行性。

圖5 融合高度曲線

圖6 故障檢測修正海壓高度曲線
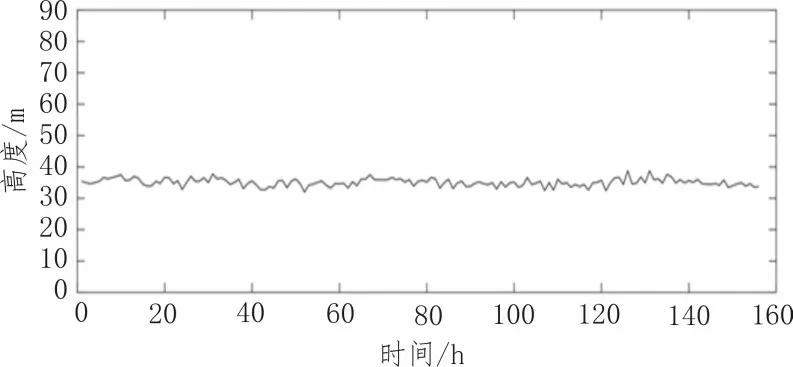
圖7 故障檢測融合高度曲線
4 結(jié)論
在分析了氣壓計(jì)高度測量算法、GPS輔助高度融合算法的原理及優(yōu)缺點(diǎn)的基礎(chǔ)上,提出了基于故障檢測的高度融合算法。該方法在GPS輔助高度融合算法的基礎(chǔ)上,加入狀態(tài)χ2故障檢驗(yàn)。在GPS受到干擾時(shí),可以消除GPS突變噪聲的影響。在選取了合適的時(shí)間間隔n后,可以兼容短時(shí)、長時(shí)導(dǎo)航中高度通道的精度要求。通過多天數(shù)據(jù)觀測以及仿真分析,證明該方法能有效改善長時(shí)導(dǎo)航中氣壓計(jì)高度測量的精度,提高了系統(tǒng)的準(zhǔn)確性和可靠性。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50