神經網絡定位中多點多映射概率樣本增強方法研究
2021-09-03 08:41:30曹秀偉
西安理工大學學報 2021年2期
楊 靜, 曹秀偉
(1.西安理工大學 機械與精密儀器工程學院, 陜西 西安 710048;2.中建科技集團有限公司深圳分公司, 廣東 深圳 518000)
隨著無線網絡、大數據等技術的不斷發展,基于位置服務的應用需求快速增長,普及到了社會生活和生產的各個領域[1]。基于無線信號RSSI(強度接收指示,received signal strength indication)的定位技術,由于成本低,使用靈活等優點得到廣泛的應用[2]。基于RSSI信號定位精度的關鍵在于如何建立盡可能多的有效的信號強度指示與空間物理位置的映射關系。過去研究者們通常采用KNN[3]等匹配算法進行定位,但是卻無法保證實時性與精度同時提升。而神經網絡憑借自身的易用性、魯棒性以及強大的非線性擬合能力,近幾年在定位應用領域逐漸受到關注[4]。神經網絡算法的性能很大程度上取決于訓練樣本,在定位算法中,只有當訓練樣本足以表征不同位置信號RSSI特征,才能保證網絡學習模型其具有泛化能力。根據無線信號傳播特點,在復雜環境中,人員、墻體以及其他障礙物,都會給RSSI信號帶來非視距以及多徑效應的不確定性[5]。大量研究表明,利用概率論與數理統計的方法處理RSSI信號的不確定性[6],具有較好的抗噪聲性能,可極大地去除信號中的噪聲,有效提高定位精度。然而,現有的神經網絡定位算法利用大量實測RSSI數據,通過人工提取數據的均值、方差等特征樣本對神經網絡進行訓練[7-8]。這種方法不僅人工成本高,而且不能有效表征無線信號的不確定性。文獻[9]提出了一種多信息融合的位置指紋采集方法,利用航位推算與步態分析生成指紋,降低了人工采集工作量,但指紋數據精度較低。2020年成意等[10]提出了群智指紋庫建立方法,利用聚類算法指紋數據進行擴展,建立了RSSI信號的Rice模型,信號的表征性較好,但模型參數受位置影響,運算復雜不利于工程實踐推廣。本文以推進指紋法在工程實際中的應用為出發點,利用無線信號的傳播特性、空間相關性以及信號的Gauss分布模型對有限的實測數據進行擴充,從而構建多點多映射概率特征樣本。利用擴充樣本訓練RSSI神經網絡位置模型,相比少樣本的訓練模型,可以提高藍牙RSSI的室內定位精度。
1 RSSI信號傳播模型與特征
無線信號從發射端經過無線信道到達接收端,根據環境不同,傳播過程存在大尺度與小尺度兩種衰減特性。其中,大尺度衰減又包括路徑損耗和陰影衰落。路徑損耗是由信號傳播距離以及信號載頻導致;陰影衰落主要是由于建筑物、高山等對信號的阻擋導致。小尺度衰減是由于建筑墻體、地板或家具等導致的無線信號多徑傳播效應。大尺度衰減特性描述信號在大距離(室外環境是10~100 m,室內更小)上信號強度變化。小尺度衰減特性描述信號在小距離(波長數量級)上信號強度變化,因此,大尺度衰減是影響RSSI定位的主要因素。在無線信號傳播中,由于障礙物的反射、折射導致信號隨機變化,實驗結果表明[11-12],在一定空間位置上的RSSI信號呈現隨機波動,信號強度服從正態分布的分布,其概率密度函數表示為:
(1)
式中:f(x)表示信號強度為x的概率;μ為信號均值,與無線信號傳播距離以及環境有關;σ為信號標準差(方差),描述了信號波動。自由空間(弱干擾空間)無線信號陰影傳播模型為:
μ=A+10nlgd
(2)
式中:d為無線信號接收點與發射點之間的距離;n為受環境影響的路徑損耗因子;A為單位距離(1 m)處的信號強度RSSI值;μ為d米處接收信號的RSSI值。模型(2)反映了自由空間傳播距離d以及信號波長等無線硬件特性對接收信號均值的影響,但在復雜傳播環境中,無線信號均值μ以及方差σ都會受環境影響。
2 多映射概率特征樣本增強算法描述
在神經網絡的訓練中,樣本數量以及樣本對數據特征的表征性,直接影響網絡的性能。通常研究者們會采用插值算法[13]對指紋數據進行擴充,但該方法無法表征環境影響與數據特征。本文提出了對有限實測數據的增強算法,其增強數據可以有效體現受實際環境的影響數據的特征,為神經網絡訓練提供大量有效樣本。首先在自由空間擬合無線信號陰影傳播模型(式(2)),并生成多點特征。然后,利用無線信號的空間相關性,對多點特征進行環境修正。最后,構建多映射概率特征樣本,反應信號的波動特征。本文提出的多點多映射樣本增強算法流程見下。
第一步:自由空間陰影傳播模型擬合。
固定一個錨節點,獲取不同距離d的信號強度RSSI,通過Kalman濾波[14]處理得到均值μ,再利用最小二乘法擬合無線信號陰影傳播模型(2)中的參數n。
第二步:生成實測樣本特征集z1。
根據實際定位環境的干擾情況,選取m個能夠代表整個定位空間環境因素的實測采樣點,讀取每個實測采樣點的RSSI樣本數據,通過Kalman濾波可得實測樣本數據的均值μ1以及方差σ1,由m個實測樣本點均值構成的實測樣本特征集z1。以圖1三個錨節點A,B,C構成的三角形定位空間為例,選圖中標記的m個實測點(g1,g2,…,gm)為實測樣本集。
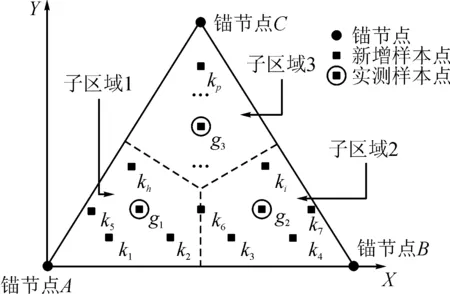
圖1 三錨節點定位空間的樣本點與子區域Fig.1 Sample points and sub-regions of the three-anchor node positioning space
第三步:生成特征的環境影響量σ以及Δμ。
考慮到環境對RSSI信號的影響,本文定義環境對RSSI信號的環境影響量為自由空間的陰影傳播模型(2)計算的采樣點RSSI特征與實測RSSI特征的差。因此,根據自由空間的陰影傳播模型(2)計算第二步中m個實測采樣點的計算均值μ0,以及結合實測樣本的均值μ1可以得到m個采樣點特征的環境影響量:Δμ=μ1-μ0;σ1=σ0。
第四步:構建新增樣本點特征值并修正。
根據無線信號傳播的空間相關性,可以認為一定半徑范圍區域內,環境對無線信號的影響相同[15]。因此,以實測樣本點為聚類中心,將定位空間劃分成若干個子區域,每個子區域包含一個實測點,在同一區域內新增樣本點與實測點受環境影響是相同的。
在圖1中,m個實測點將ABC三角區域分為m個子區域,圖1中用虛線分割。在三角區域ABC中隨機新增p個樣本點(k1,k2,…,kp)(圖中■標記位置)。首先利用每個新增樣本點的位置信息,通過無線信號陰影傳播模型(2)可以得到新增樣本點RSSI計算均值μp0,然后,根據每個新增樣本點所在子區域,對新增樣本的特征進行環境修正,修正均值為μp=μp0+Δμ,修正方差為σp=σ1。
第五步:生成增強樣本特征集z2。
實測樣本點特征(μ1,σ1)與新增樣本點特征(μp,σp)共同組成具有(m+p)個點的增強樣本特征集z2。
第六步:生成多點多映射概率分布樣本集z3。
根據RSSI信號分布模型(式(1)),由增強樣本點的均值與方差,按正態分布在每個樣本點生成N個多映射樣本。即由m個實測樣本,增強為(p+m)N個Gauss概率分布的多點多映射樣本集z3,該增強樣本集更好地反應了環境對無線信號的衰減以及波動影響。
利用上述方法我們可以根據定位區域環境干擾程度不同,自適應構建不同定位區域的多點多映射概率增強樣本集。
3 實驗結果與分析
3.1 實驗環境與過程
圖2是某地下車庫的實驗場景,該場地為半開放式復雜場景。圖3為該地下車庫的俯視圖,車庫長約38.8 m,寬約27.5 m,高約5 m。車庫為雙層金屬結構車庫,車庫中有通道1、2、3,圖3中灰色■部分為混凝土障礙立柱,黃色部分是停車區,在通道3兩側以及車庫四周有混凝土墻,車庫頂部以及停車區內有大量金屬材質障礙物。該實驗環境復雜,實驗結論具有說服力。

圖2 地下車庫實驗實景圖Fig.2 Experimenton the underground garage

圖3 實驗場地錨節點布局Fig.3 Layout of anchor nodes in the experimental site
本實驗采用藍牙技術[16]對該地下車庫中人員進行定位。實驗采用藍牙信號采集模塊(錨節點)為深圳瑞迪萊科技公司的NRF52832;藍牙信號發射模塊(信標)為北京四月兄弟科技的April Beacon N04。根據文獻[17]可知,當3個錨節點以最佳測量半徑為邊長布局為等邊三角形時,待定位點在三角形區域內的定位精度最高,故本實驗在待定位區域內錨節點布局見圖3(圖中●為錨節點)。每3個錨節點構成一個待定位區域,相關運算在圖中22號定位區域內進行。
首先,在自由空間對所使用的藍牙錨節點以及信標進行不同距離處RSSI的測量,擬合得到藍牙模塊的陰影傳播模型:
μ=-35.7+8.8lgd
(3)

圖4 22號定位區域樣本點布局圖Fig.4 Layout of sample points in No.22 positioning area
圖5中虛線為三個錨節點讀取g1點信標的RSSI實測樣本數據,實線為濾波后的數據,可見RSSI濾波后的數據仍然呈現隨機波動,利用濾波后數據可得均值μ1。圖6為濾波后RSSI的概率分布直方圖,可見接收的RSSI信號基本呈正態分布,計算可得方差σ1。

圖5 三個錨節點讀取實測點g1的RSSI值Fig.5 Three anchor nodes read the RSSI value of the measured point g1
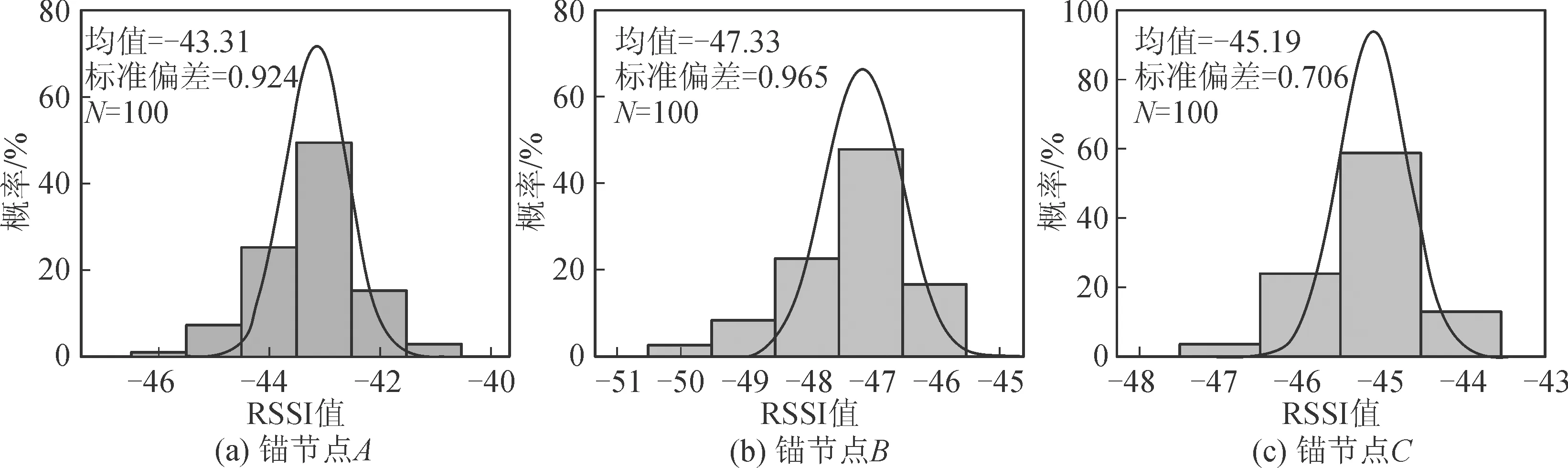
圖6 實測點g1濾波后RSSI概率分布直方圖Fig.6 Histogram of RSSI probability distribution after filtering of measured point g1
然后,將定位空間分為7個子區域,并新增42個樣本點■,見圖4。利用模型(3)以及無線信號傳播的空間相關性,可以得到增強樣本的特征集z2。之后利用增強樣本點的均值與方差,通過MATLAB函數normrnd,在每個樣本點各生成100個正態分布的樣本,得到4 900個多點多映射概率樣本集z3。
3.2 實驗結果分析
1) 增強樣本與實測樣本的RSSI誤差分析
為了對本文樣本增強算法的合理性做評估,通過人工對上述實驗中增強的49個采樣點進行實測,每個采樣點測量100組RSSI值,對實測原始數據濾波后得到49個樣本點的實測RSSI的均值μ與方差σ。表1給出了49個采樣點對錨節點A,B,C的實測RSSI特征,與本文增強算法得到的樣本特征的對比。由表1可見,本文增強方法得到的RSSI與實測RSSI值的均值μ誤差為3.9%,方差σ的誤差為36.4%。其中,方差特征的誤差比較大,是因為實驗環境對實測數據的多徑效應影響嚴重,導致測試數據波動大,增強數據更加平穩,消除了環境影響,有利于提高定位精度。
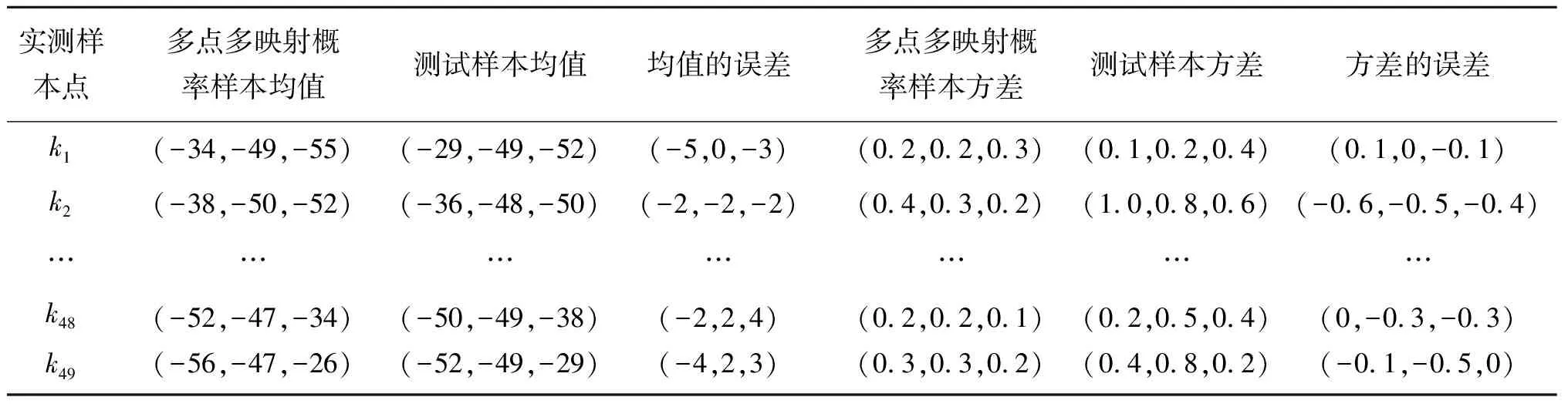
表1 49個實測樣本點均值、方差對比Tab.1 Comparison of mean and variance of 49 measured sample points
2) 定位精度分析
利用本次實驗的7個實測點特征樣本集z1,49個增強樣本特征集z2、多點多映射樣本集z3,以及對49個全人工采集樣本集z4,分別對同參數的BP神經網絡進行訓練,得到4個不同的定位網絡net1,net2,net3以及net4。在圖4中任意選取三個待測位置L1,L2,L3(圖中★標識),利用圖4中網絡分別對每個位置進行5次定位并求均值,得到結果見表2。表中定位誤差Δd為待測點理論位置與計算位置之間的歐氏距離。
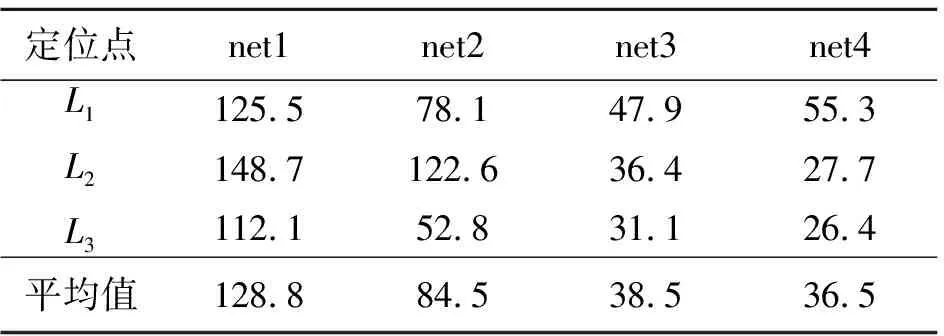
表2 三種訓練樣本得到的神經網絡定位誤差ΔdTab.2 Neural network positioning error Δdobtained by the three training samples 單位:cm
由表2可見,由于7個實測點特征樣本的數據量過少,導致網絡net1的泛化能力弱,平均定位誤差為128 cm,無法在實際工程中應用。網絡net2采用了增強的49個特征樣本,樣本數量增加,且通過修正反應了環境在整個定位空間的影響,網絡定位精度提高34.4%,但由于單采集點只有一組均值,數據量過少,無法體現RSSI的概率分布情況,故平均定位精度提高有限。網絡net3采用了多點多映射正態分布樣本,樣本數量多,且更真實反應數據波動,由此訓練的網絡net3模型定位精度較高,平均定位誤差38.5cm,相對網絡net2精度提高了50%,與49點全人工采樣數據訓練的網絡net4相比,定位誤差僅增加了5.5%。但是從樣本集的構建成本分析,多點多映射概率樣本增強方法生成的49點樣本集僅需7個實測點即可,與人工采集49點樣本集相比,人工采集工作量降低了85.7%。綜合分析,本文提出的樣本增強方法在基于RSSI的神經網絡定位算法中應用,人力成本與定位精度綜合性能最優。
4 結 論
本文根據自由空間無線信號的傳播特性,由少量實測點數據生成定位空間多點特征,并利用空間相關性進行特征的環境修正。最后,利用信號波動的概率特征構建了多映射的正態分布數據樣本。實驗結果表明,本文提出的多點多映射概率分布樣本生成方法,人工成本低,生成的樣本能更好地表征數據特征,提高了神經網絡的定位精度。但考慮環境對無線信號影響的不確定,如何建立復雜環境的傳播模型將是主要的研究方向。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
