無人機單(雙)火箭助推發射安全性對比分析
2021-09-03 02:22:02陳剛
兵器裝備工程學報 2021年8期
關鍵詞:安全性
陳 剛
(南京模擬技術研究所, 南京 210016)
1 引言
無人機以成本低、使用靈活、功能多樣、不存在人員安全因素等優勢而越來越受到重視,并在軍、民用領域得到廣泛使用[1-4]。火箭助推發射方式具有便捷、快速、對發射場地無嚴格要求、適合于野戰環境等優點[5-7]。根據火箭助推器使用數量的不同,火箭助推發射方式一般分為單火箭助推發射方式、雙火箭助推發射方式[8-11]。
單火箭助推發射方式具有助推器研制難度低、發射成本低、技術成熟可靠的優勢。國內大多數無人機均采用了單火箭助推發射方式,如浙江大學的“沙錐”無人機。國外也有采用單火箭助推發射方式的無人機,如以色列的“哈比”無人機。
采用單火箭助推發射方式時,必須對火箭助推器的安裝角度和推力線位置進行嚴格控制,盡量使推力線過無人機重心,以保證無人機發射安全[7]。在實際應用中,單火箭助推發射無人機通常采用吊掛方式調節助推器推力線。此外,采用單火箭助推發射方式,對推力座處結構的剛強度要求高,部分擠占機身內部裝載空間。
為了提高競爭力,現代無人機基本都具有搭載任務載荷多樣化的特點,導致無人機整體重心往往會偏移理論重心位置。如果采用單火箭助推發射方式,每次更換任務載荷都需要對助推器推力線的位置進行重新調整。因此,單火箭助推發射方式導致無人機在一些不具備吊掛條件的野戰環境下無法實現多任務載荷交替更換下的復飛,大大降低了無人機的戰斗力。
目前,雙火箭助推發射方式已廣泛應用在了國外無人機上。如著名的美國“BQM-74E”系列(如圖1(a))、“BQM-177”系列(如圖1(b))和意大利的“米拉奇”系列無人機等。國內采用雙火箭助推發射方式的無人機比較少,主要有南京航空航天大學的“長空”系列無人機和北京金朋達公司的“GFA”系列無人機。
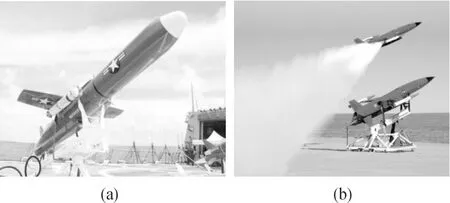
圖1 雙火箭助推發射方式的無人機
無人機采用雙火箭助推發射方式,主要是由無人機結構布局決定的[8-9]。對于雙火箭助推發射方式的優點,文獻中較少通過仿真計算進行深入研究。
本文以無人機單/雙火箭助推發射方式為研究對象,通過仿真計算,深入研究無人機實際質心偏移對2種發射方式的安全性影響。研究結果將為無人機的火箭助推器發射方式設計提供理論參考。
2 發射動力學聯合仿真模型建立
無人機機體坐標系定義為:以無人機重心為原點,X軸沿機身向前指向機頭原點,以水平向右方向為Y軸,根據笛卡爾右手坐標系建立Z軸。本文有關無人機發射過程的姿態變化,均是基于機體坐標系來研究。
無人機火箭助推發射系統主要包括無人機、發射架和火箭助推器3個部分。
無人機單火箭助推發射系統如圖2所示。助推器與機體腹部的推力座為接觸約束關系,可將助推器推力可靠的傳遞到機體上;助推器工作結束后,在重力、氣動載荷的共同作用下,助推器與推力座分離。單火箭助推器與機身之間采用夾角安裝方式,該方式可以利用助推器推力在機身Z方向的分量提高發射段無人機的離地高度。故采用該方式時,無人機的初始俯仰角不大,一般在15°左右。
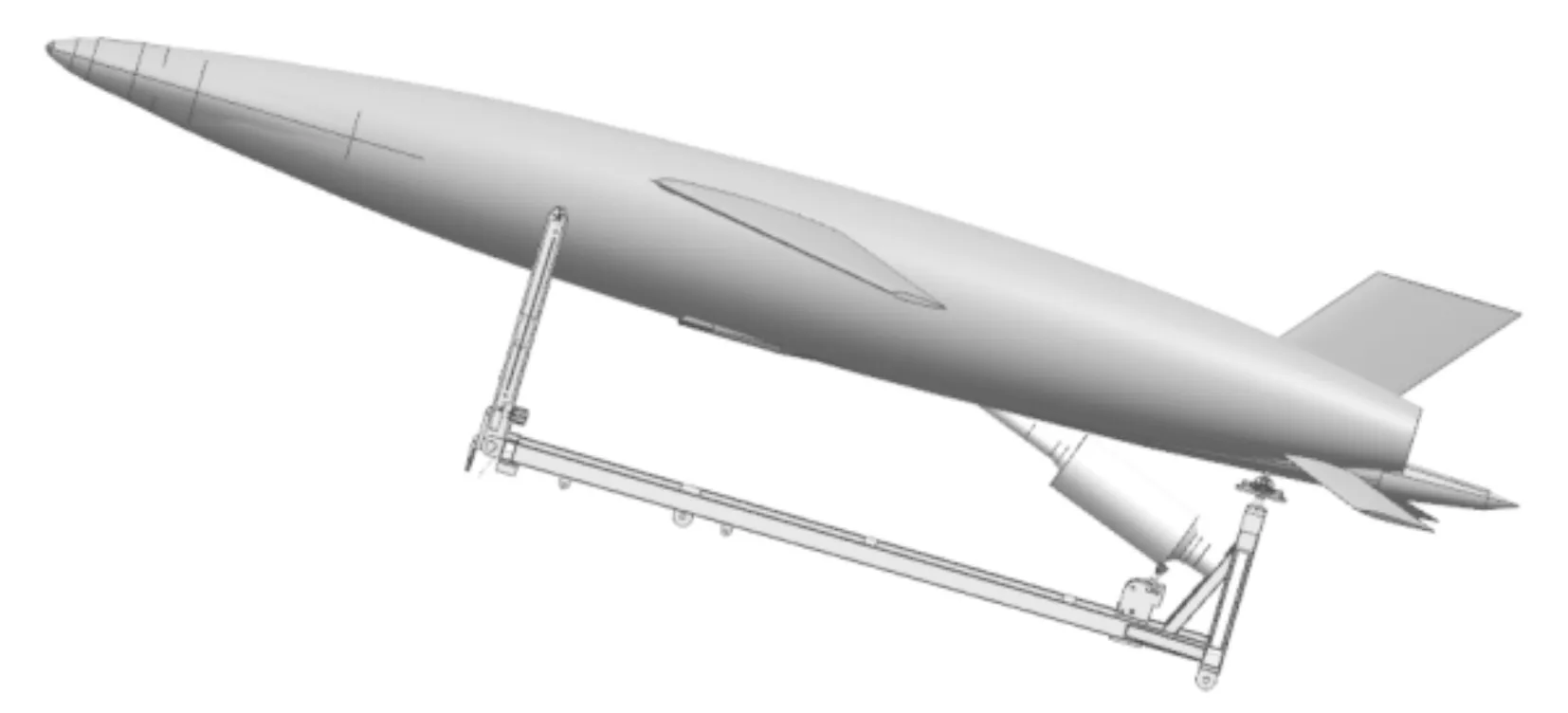
圖2 單火箭助推發射系統示意圖
為保證無人機的發射末速度一致,無人機的單火箭助推器總沖等于兩枚雙火箭助推器的總沖。無人機自身攜帶的渦噴發動機推力均為1 500 N。
無人機雙火箭助推發射系統如圖3所示。助推器對稱布置在機體兩側的機翼下方。機翼下方設有加強的傳力軸,可將助推器推力可靠的傳遞到飛機上;助推器工作結束后,在重力、氣動載荷的共同作用下,助推器與推力座分離。由于助推器與機身平行安裝,推力在機身Z方向沒有分量。為提高發射段無人機的離地高度,無人機的初始俯仰角較大,一般在20°~25°左右。
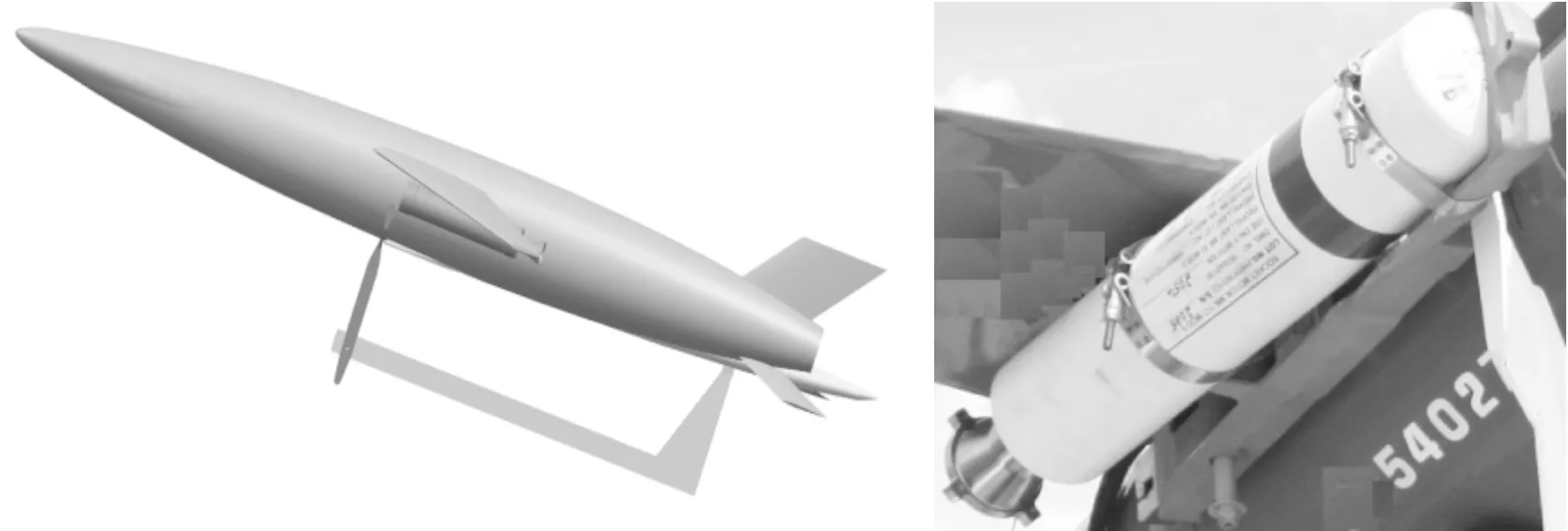
圖3 雙火箭助推發射系統示意圖
在發射階段,需要對無人機的俯仰和側傾姿態進行控制,以確保安全發射。
采用單火箭助推發射方式時,設定發射過程俯仰角控制目標值為15°,側傾角控制目標值為0°。
采用雙火箭助推發射方式時,設定發射過程俯仰角控制目標值為20°,側傾角控制目標值為0°。
無人機雙火箭助推發射過程涉及無人機結構、飛行控制、氣動設計等多個學科,是典型的多學科耦合問題,聯合仿真方法是求解此類問題的一致有效手段[9]。無人機雙火箭助推發射聯合仿真模型建立過程:在ADAMS中,建立無人機火箭助推發射動力學模型; 在MATLAB中,建立該型無人機低馬赫數階段(0.3Ma以下)的飛控模型;在ADAMS中,通過傳感器測量無人機的6個姿態量:3個姿態角(俯仰、側傾、偏航)、速度、加速度和高度,并將其創建為輸入狀態變量,提供給MATLAB飛控模型實時調用;將MATLAB飛控模型計算得到的3個等效氣動力、3個等效氣動力矩定義為輸出變量,并將其傳遞到ADAMS動力學模型中;通過輸入、輸出狀態變量的創建,實現無人機的受控發射過程聯合仿真。
3 無人機火箭助推發射安全性對比分析
3.1 無人機質心X軸位置偏差對發射安全性影響分析
無人機質心X軸位置偏差主要影響無人機發射階段的俯仰姿態和高度。
取質心在理論位置和沿機體坐標系X軸前移30 mm兩種工況,計算了2種火箭助推發射方式下的無人機俯仰角和高度變化,如圖4~圖7所示,對比結果見表1所示(其中,偏差百分比以質心理論位置值為基準值)。
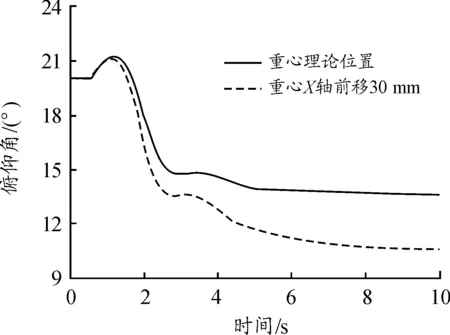
圖4 雙火箭發射-俯仰角變化曲線Fig.4 The pitch angle curve of double solid-rocket launching
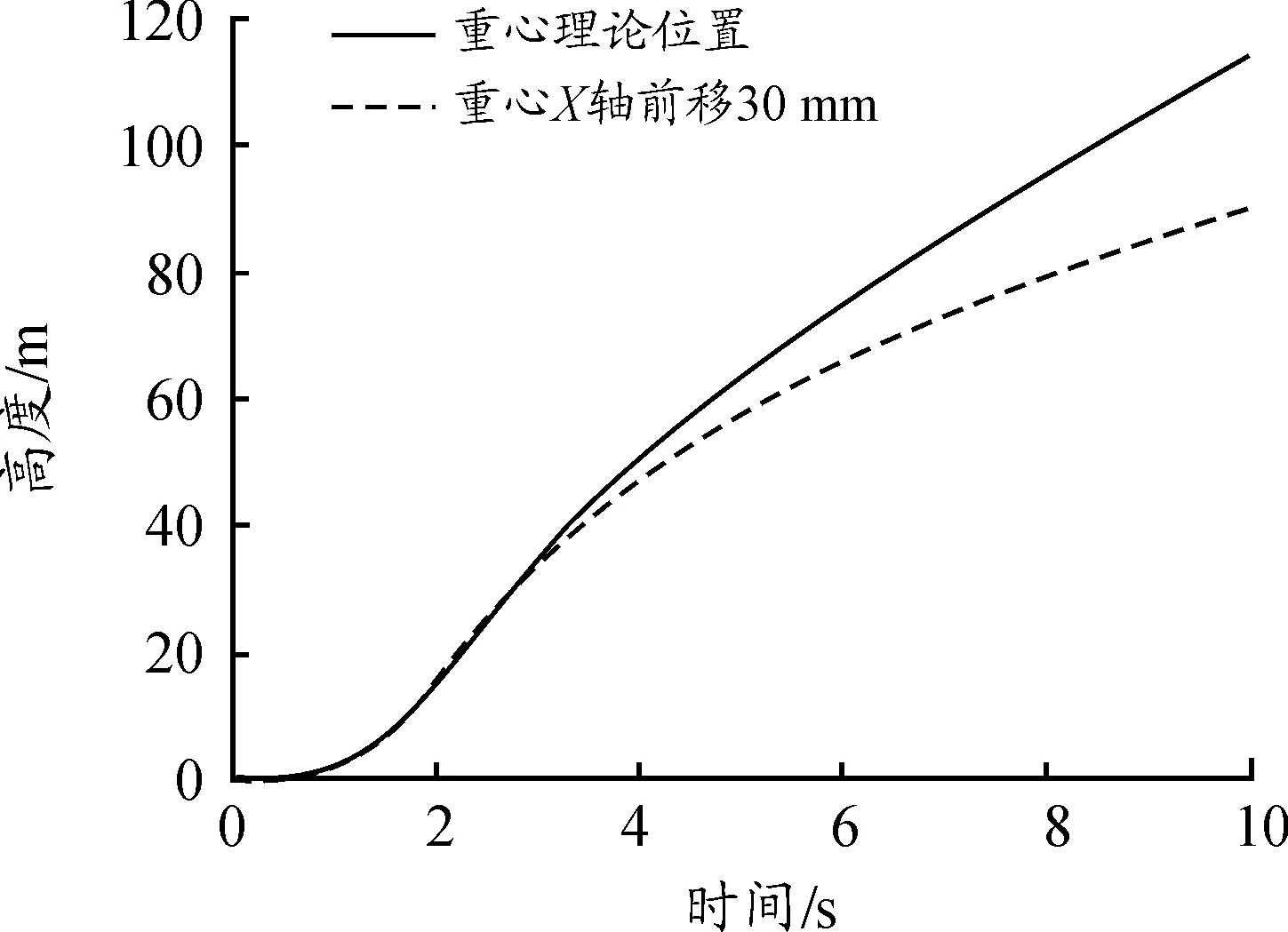
圖5 雙火箭發射-質心高度變化曲線Fig.5 The centroid height curve of double solid-rocket launching
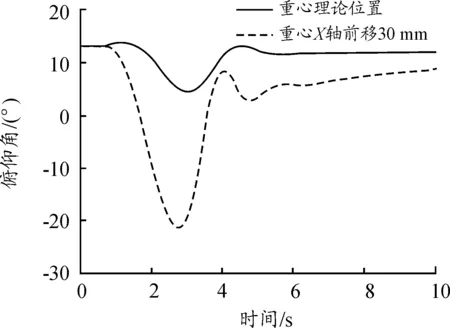
圖6 單火箭發射-俯仰角變化曲線Fig 6 The pitch angle curve of single solid-rocket launching
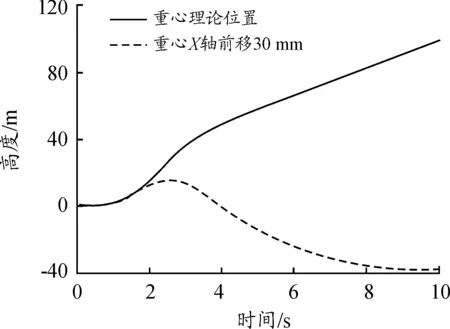
圖7 單火箭發射-質心高度變化曲線

表1 評價參量對比結果
從圖4~圖7和表1中可以看出:
1) 采用雙火箭助推發射方式的無人機最小俯仰角分別為13.5°和9.5°,2種工況下俯仰角偏差約為22%;采用單火箭助推發射方式的無人機最小俯仰角分別為5°和-21°,2種工況下俯仰角偏差約為502%;
2) 10 s時刻,采用雙火箭助推發射方式的無人機質心高度分別為114 m和90 m,2種工況下俯仰角偏差約為21%;采用單火箭助推發射方式的無人機質心高度分別為100 m和-39 m,2種工況下俯仰角偏差約為139%;
3) 在2.8 s時刻,采用單火箭助推發射方式的無人機的俯仰角已接近-22°;由于無人機的俯仰角在一段時間內持續為負數,故無人機的質心高度增大到一定高度后開始降低,呈現掉高現象,在3.95 s時刻,采用單火箭助推發射方式的無人機質心高度已接近零。此工況下,無人機發射后將很快墜地。
3.2 無人機質心Y軸位置偏差對發射安全性影響分析
無人機質心Y軸位置偏差主要影響無人機發射階段的滾轉姿態和偏航姿態。由于本文研究的無人機,在其發射階段不對偏航姿態進行控制,故本小節只分析無人機質心Y軸位置偏差對滾轉姿態的影響。
取質心在理論位置和沿機體坐標系Y軸左移3 mm兩種工況,計算了2種火箭助推起方式下的無人機滾轉角變化,如圖8~圖9所示,對比結果見表2所示。從圖8~圖9和表2中可以看出:質心在理論位置工況,2種助推方式下的無人機滾轉姿態角幾乎均為0°;質心左移3 mm工況,采用雙火箭助推發射方式的無人機滾轉角最大值為9.6°,采用單火箭助推發射方式的無人機滾轉角最大值為18°;從滾轉角最大值上看,單火箭助推發射方式比雙火箭助推發射方式高出了88%。
表2 評價參量對比結果Table 2 The comparision results of parameters
圖8 雙火箭發射-滾轉角變化曲線Fig.8 The roll angle curve of double solid-rocket launching
圖9 單火箭發射-滾轉角變化曲線
3.3 無人機質心Z軸位置偏差對發射安全性影響分析
無人機質心Z軸位置偏差主要影響無人機發射階段的俯仰姿態和高度。
取質心在理論位置和沿機體坐標系Z軸下移3 mm兩種工況,計算了2種火箭助推起方式下的無人機俯仰角和高度變化,如圖10~圖13所示,對比結果見表3所示。
圖10 雙火箭發射-俯仰角變化曲線Fig.10 The pitch angle curve of double solid-rocket launching
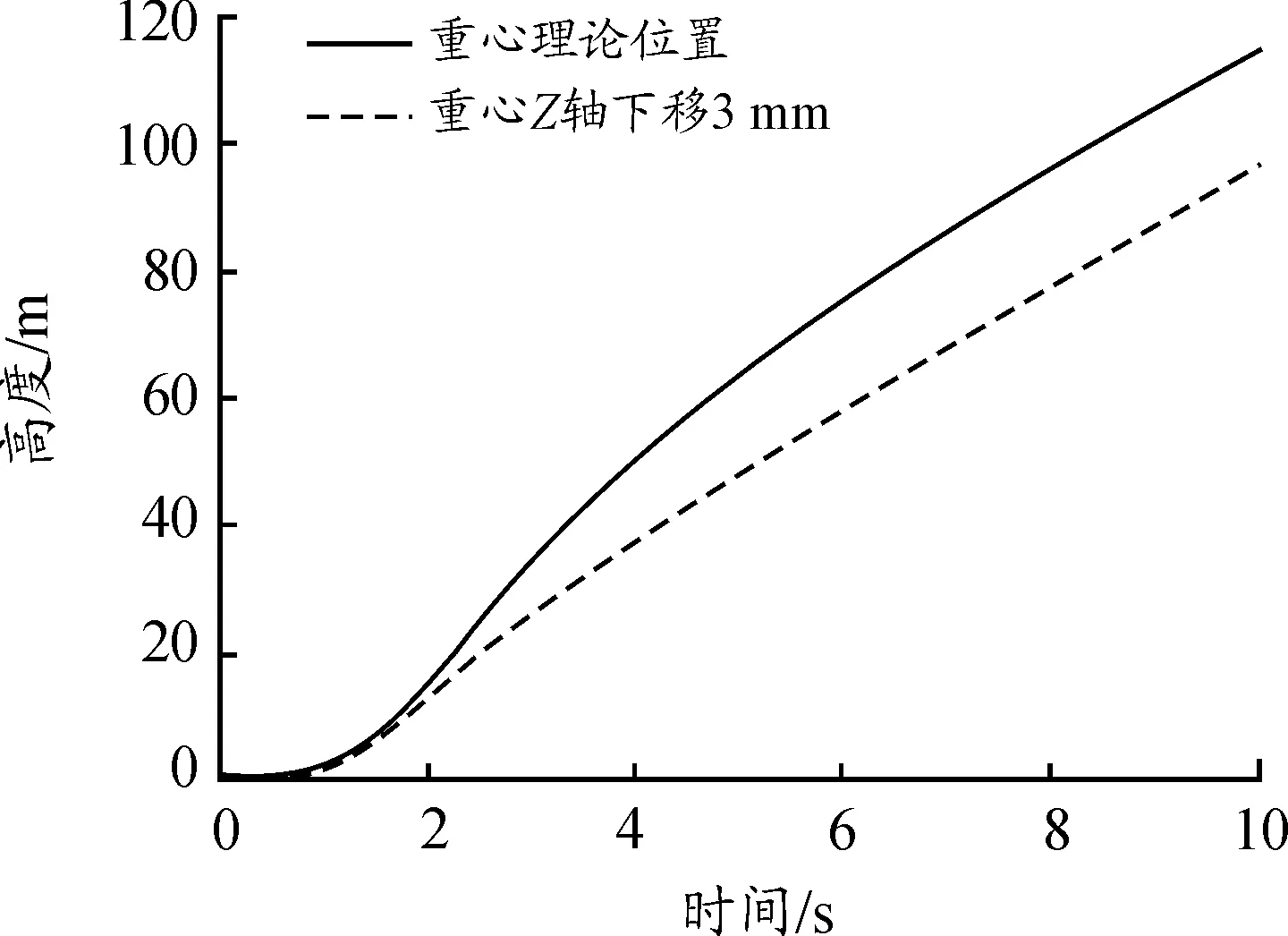
圖11 雙火箭發射-質心高度變化曲線

圖12 單火箭發射-俯仰角變化曲線Fig 12 The pitch angle curve of single solid-rocket launching
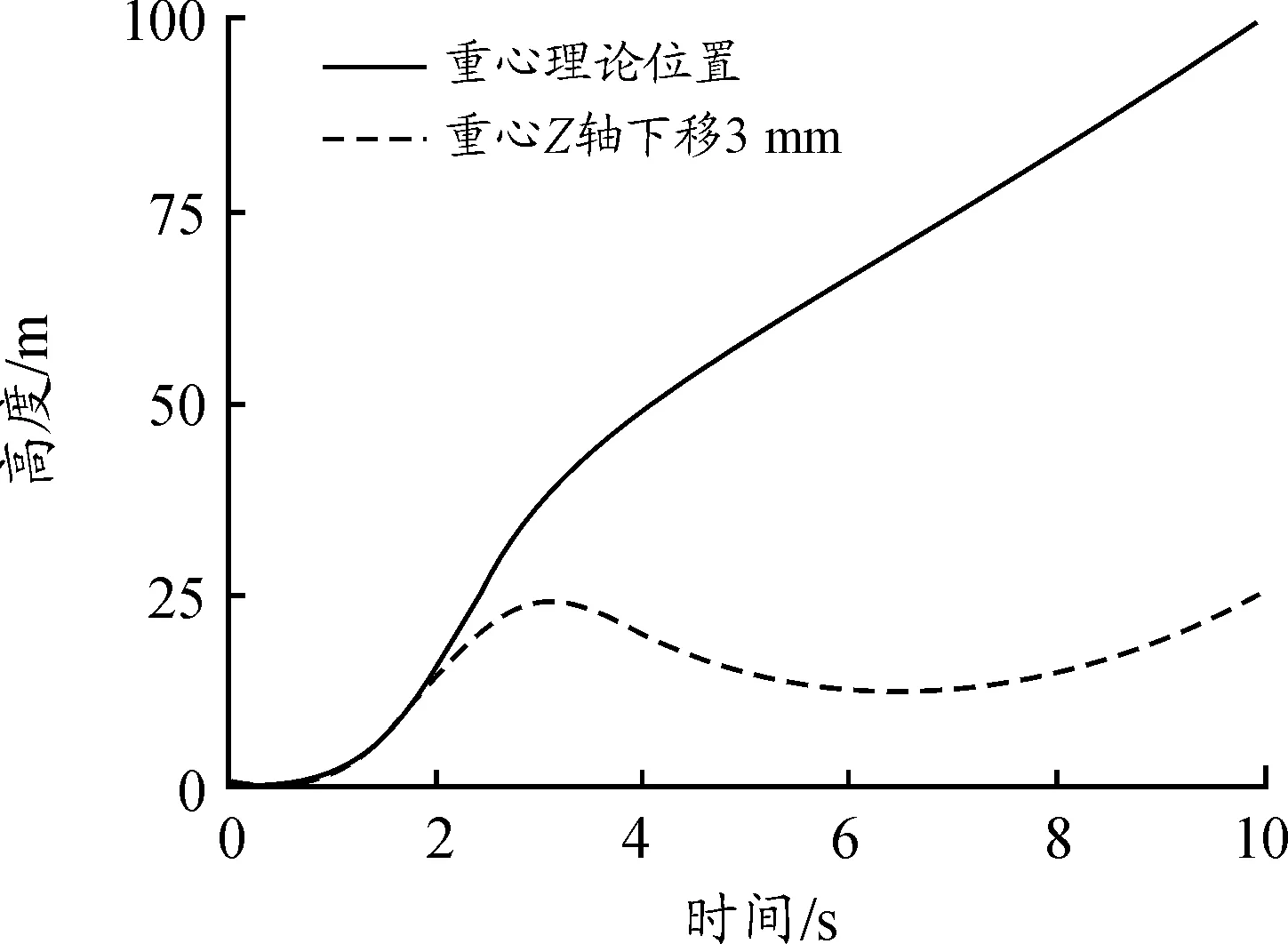
圖13 單火箭發射-質心高度變化曲線

表3 評價參量對比結果
從圖10~圖13和表3中可以看出:
1) 采用雙火箭助推發射方式的無人機最小俯仰角分別為13.5°和11°,2種工況下俯仰角偏差約為19%;采用單火箭助推發射方式的無人機最小俯仰角分別為4.9°和-11°,2種工況下俯仰角偏差約為324%;
2) 10 s時刻,采用雙火箭助推發射方式的無人機質心高度分別為114 m和95 m,2種工況下俯仰角偏差約為17%;采用單火箭助推發射方式的無人機質心高度分別為100 m和25 m,2種工況下質心高度偏差約為75%;
3) 采用單火箭助推發射方式,在3.0 s時刻無人機的俯仰角已接近-11°,由于無人機的俯仰角在一段時間內持續為負數,故無人機的質心高度增大到一定高度后開始降低,呈現掉高現象,在6.5 s時刻無人機質心高度已降低到約12.3 m高度。
4 結論
1) 首先建立了單/雙火箭助推發射系統對應的三維模型,基于聯合仿真原理,在ADAMS中建立了發射段動力學模型,在MATLAB中建立了飛控模型,實現了該型無人機的發射段多場耦合仿真建模,為進一步對無人機發射安全性分析奠定基礎。
2) 無人機發射安全性仿真分析結果顯示:相同的質心位置偏移工況下,采用雙火箭助推發射方式的無人機,其發射安全性明顯高于單火箭助推發射方式。
3) 無人機采用雙火箭助推發射方式時,既可以降低無人機的推力線調整難度,又能縮短無人機的外場復飛準備時間,顯著提高了無人機的戰場適應性。
本文得到的2種助推發射方式對無人機發射安全性的影響結論,可為無人機的火箭助推器發射方式設計提供理論參考。
猜你喜歡
現代儀器與醫療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
建材發展導向(2021年14期)2021-08-23 00:57:04
建材發展導向(2021年23期)2021-03-08 01:05:44
裝備制造技術(2020年4期)2020-12-25 05:25:56
科技傳播(2019年22期)2020-01-14 03:05:32
活力(2019年17期)2019-11-26 00:42:18
基層中醫藥(2018年6期)2018-08-29 01:20:20
上海農業學報(2017年3期)2017-04-10 12:39:18
信息安全與通信保密(2016年3期)2016-08-23 01:23:46