激光雷達(dá)的內(nèi)參建模與點(diǎn)云修正方法*
2021-08-31 03:21:28張曉龍劉茂林邵振雷肖鵬川楊殿閣
汽車工程 2021年8期
張曉龍,江 昆,孫 愷,劉茂林,邵振雷,肖鵬川,楊殿閣
(1.清華大學(xué)車輛與運(yùn)載學(xué)院,汽車安全與節(jié)能國家重點(diǎn)實(shí)驗(yàn)室,北京100084;2.上海禾賽科技股份有限公司,上海201702)
前言
針對激光測距的理論研究早在20世紀(jì)60年代開始,在2000年前后迎來快速發(fā)展,相關(guān)產(chǎn)品在測繪領(lǐng)域得到廣泛應(yīng)用[1]。近年來,激光雷達(dá)(light detection and ranging,LiDAR)已成為自動(dòng)駕駛中重要的車載傳感器。相比于視覺傳感器,激光雷達(dá)不受環(huán)境光照變化影響,可以直接獲得周圍道路環(huán)境的高精度三維點(diǎn)云信息,因此在高精度地圖構(gòu)建、環(huán)境感知和定位等任務(wù)中得到廣泛應(yīng)用[2]。根據(jù)光束掃描實(shí)現(xiàn)方式的不同,激光雷達(dá)可分為機(jī)械式激光雷達(dá)(mechanical LiDAR)和固態(tài)激光雷達(dá)(solid?state LiDAR)兩大類[3]。
激光雷達(dá)通過測量激光的飛行時(shí)間(time of flight,ToF)獲得被測物的距離ρ;通過旋轉(zhuǎn)編碼器(rotary encoder)確定激光的方位角(azimuth angle)φ,從而獲得球坐標(biāo)系下的測量量M=[ρ φ],如圖1所示。激光的俯仰角(elevation angle)θ通過激光發(fā)射器的安裝角度確定,屬于激光雷達(dá)內(nèi)部參數(shù)(intrinsic,后文簡稱內(nèi)參)的一部分,將在后文詳述。之后通過內(nèi)參模型進(jìn)行解算,獲得被測物在激光雷達(dá)中心空間直角坐標(biāo)系下的點(diǎn)坐標(biāo)PL=[x y z]T。
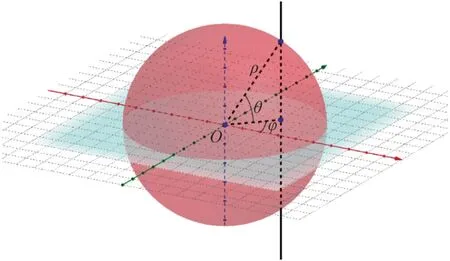
圖1 球坐標(biāo)系示意圖
正確的激光雷達(dá)內(nèi)參建模具有重要意義:首先,這保證了獲得的測量點(diǎn)坐標(biāo)能夠準(zhǔn)確反映實(shí)際物理環(huán)境;其次,這也為后續(xù)利用激光雷達(dá)進(jìn)行定位和建圖提供了準(zhǔn)確的點(diǎn)云數(shù)據(jù)。在實(shí)踐中發(fā)現(xiàn),不準(zhǔn)確的激光雷達(dá)內(nèi)參建模和標(biāo)定會導(dǎo)致獲得的點(diǎn)云平面邊緣不平整[4]、平面厚度增加[5-6]。
目前,針對激光雷達(dá)內(nèi)參的建模主要針對于機(jī)械式激光雷達(dá),通常依賴于機(jī)械式激光雷達(dá)的物理結(jié)構(gòu)以及工作過程[7]。一類內(nèi)參模型認(rèn)為距離測量量ρ和方位角測量量φ是相對于每個(gè)激光發(fā)射器獲得的,對于每條激光線束都定義了多個(gè)參數(shù),通過解算測量量M=[ρ φ]獲得點(diǎn)云坐標(biāo),如式(1)所示:
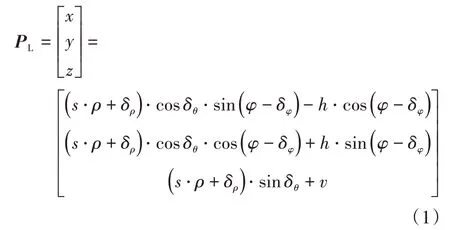
式中:s為尺度因子,用于修正與距離相關(guān)的測距誤差[8];δρ為對于距離測量的修正量,δθ為俯仰角(可理解為相對于水平面的修正量),δφ為對于方位角的修正量;h和v分別為激光發(fā)射器相對于激光雷達(dá)中心在水平和垂直方向上的偏移量。
這樣的內(nèi)參模型將所有參數(shù)都定義在激光線束上,對于每條激光線束使用6個(gè)參數(shù)[δρ δθ δφs h v]進(jìn)行描述,在使用前須對這些參數(shù)進(jìn)行標(biāo)定。模型參數(shù)較多,在實(shí)際應(yīng)用中為內(nèi)參標(biāo)定帶來了不便。
上述內(nèi)參模型得到了廣泛應(yīng)用,但在實(shí)際使用中,也常常舍去部分模型參數(shù),使得上述模型發(fā)生退化。根據(jù)模型中6個(gè)參數(shù)的有無,對于不同文獻(xiàn)中的內(nèi)參建模方法進(jìn)行整理匯總,結(jié)果如表1所示。

表1 內(nèi)參建模方法整理
Pandar XT機(jī)械式激光雷達(dá)由于收發(fā)時(shí)所有激光線束均通過相同的發(fā)射透鏡和接收透鏡中心,具有結(jié)構(gòu)和光路上的對稱性,因此可以帶來內(nèi)參建模和標(biāo)定上的簡化。本文提出一種針對該型機(jī)械式激光雷達(dá)內(nèi)參建模和標(biāo)定方法;并考慮其偏心結(jié)構(gòu)對于點(diǎn)云的影響,提出角度修正和距離修正兩種方法對于獲得點(diǎn)云進(jìn)行修正;通過仿真模擬兩種模型的修正效果,并通過實(shí)際點(diǎn)云進(jìn)行驗(yàn)證;最后在位姿估計(jì)算法中驗(yàn)證修正算法的有效性。
1 內(nèi)參建模
由于不同型號機(jī)械式激光雷達(dá)間存在結(jié)構(gòu)差異,本章從Pandar XT激光雷達(dá)的機(jī)械結(jié)構(gòu)與工作原理出發(fā),建立內(nèi)參模型,并給出各個(gè)參數(shù)的定義和標(biāo)定方式,進(jìn)而提出兩種點(diǎn)云修正方法,后文將沿用本章中參數(shù)的符號和定義。
1.1 機(jī)械結(jié)構(gòu)與工作原理
Pandar XT機(jī)械式激光雷達(dá)機(jī)械結(jié)構(gòu)如圖2所示。

圖2 Pandar XT機(jī)械式激光雷達(dá)結(jié)構(gòu)示意圖
圖中:O為激光雷達(dá)坐標(biāo)系原點(diǎn),S為發(fā)射透鏡光心,二者等高共面,之間有一恒定偏移量;T為測量點(diǎn)位置;Laser為激光發(fā)射器;APD為雪崩光電二極管(avalanche photon diode,APD)。
每條激光線束從激光發(fā)射器發(fā)出后經(jīng)過光路折疊反射鏡兩次反射,從發(fā)射透鏡光心S發(fā)出;在目標(biāo)表面發(fā)生漫反射后經(jīng)過接收透鏡返回激光雷達(dá),再經(jīng)過光路折疊反射鏡兩次反射,在雪崩光電二極管處進(jìn)行光電信號轉(zhuǎn)換,完成飛行時(shí)間測量,進(jìn)而獲得距離測量值d;通過旋轉(zhuǎn)編碼器獲得激光雷達(dá)的方位角ω。之后通過內(nèi)參模型對于獲得的測量量M=[dω]進(jìn)行解算,獲得激光雷達(dá)坐標(biāo)系下的點(diǎn)坐標(biāo)PL,該過程可以用一個(gè)抽象函數(shù)f(?)表示:

激光雷達(dá)坐標(biāo)系為一右手系,采用“左-后-上”方式定義;方位角ω相對于y軸正方向定義,俯視圖中順時(shí)針方向?yàn)檎鐖D3所示。
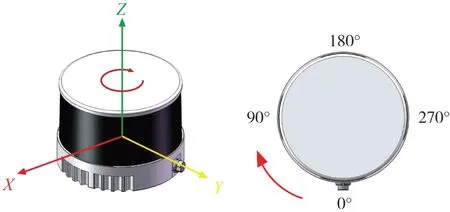
圖3 激光雷達(dá)坐標(biāo)系及方位角示意圖
1.2 內(nèi)參模型與參數(shù)標(biāo)定
由于所有激光線束在收發(fā)時(shí)均通過相同的發(fā)射透鏡和接收透鏡中心,該型機(jī)械式激光雷達(dá)具有結(jié)構(gòu)和光路上的對稱性,因此可以帶來內(nèi)參建模和標(biāo)定上的簡化。定義如下模型參數(shù):
(1)發(fā)射透鏡光心S相對于激光雷達(dá)中心O的偏移量b和h,如圖2所示;
(2)發(fā)射透鏡光心S處球坐標(biāo)系下每條激光線束的方位角修正量α和俯仰角β。
可以看出,第1項(xiàng)與激光雷達(dá)自身結(jié)構(gòu)相關(guān),對于每條激光線束只須標(biāo)定第2項(xiàng)中的兩個(gè)參數(shù)。通過引入激光雷達(dá)結(jié)構(gòu)參數(shù)減少了需要標(biāo)定的參數(shù)量,簡化了標(biāo)定流程。在標(biāo)定過程中,偏移量b和h通過激光雷達(dá)CAD模型獲得;方位角修正量α和俯仰角β相對于發(fā)射透鏡光心S標(biāo)定,距離測量值d相對于激光雷達(dá)中心O標(biāo)定。
在激光雷達(dá)驅(qū)動(dòng)中,目前直接基于球坐標(biāo)系下的激光發(fā)射角以及距離測量來解算點(diǎn)的坐標(biāo),如式(3)所示。

但是,由于激光雷達(dá)中心O和發(fā)射透鏡光心S在空間上不重合,獲得的距離測量d=|OT|≠|(zhì)ST|,如圖4所示。因此在采用上述方法進(jìn)行坐標(biāo)解算時(shí)會帶來誤差,造成獲得的點(diǎn)云存在畸變,需要對于點(diǎn)云進(jìn)行修正。
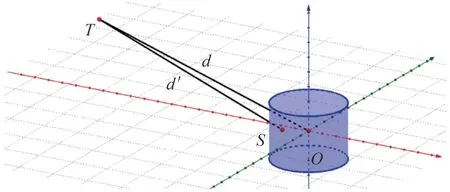
圖4 測量示意圖
1.3 修正方法建模
考慮通過兩種方法進(jìn)行修正:一方面,考慮將發(fā)射透鏡光心S下的方位角修正量α和俯仰角β修正到激光雷達(dá)中心O下的方位角修正量α′和俯仰角β′,利用在該處標(biāo)定的距離測量值d解算坐標(biāo),該方法稱為角度修正;另一方面,考慮將激光雷達(dá)中心O下的距離測量值d修正到發(fā)射透鏡光心S下的距離測量值d′,利用在該處標(biāo)定的方位角修正量α和俯仰角β解算坐標(biāo),該方法稱為距離修正。
1.3.1 角度修正模型
首先對方位角修正量α進(jìn)行修正,如圖5所示。

圖5 方位角修正示意圖
圖中T′為測量點(diǎn)T在水平面上的投影。
在俯視圖中ΔSOT′應(yīng)用正弦定理,有
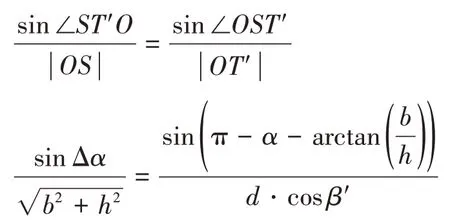
可得:
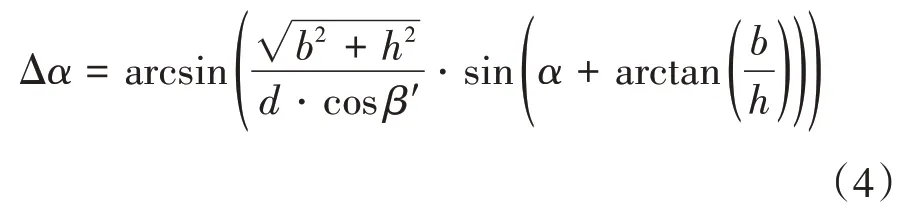
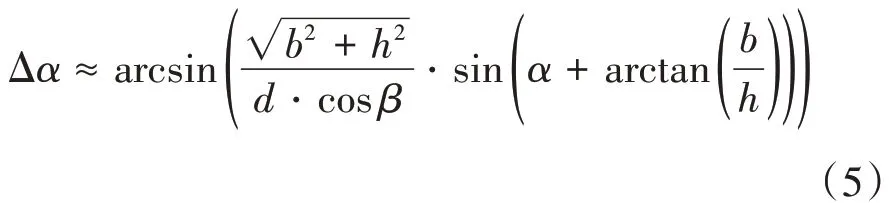
由于β′≈β,進(jìn)行如下近似:
之后對俯仰角β進(jìn)行修正,如圖6所示。
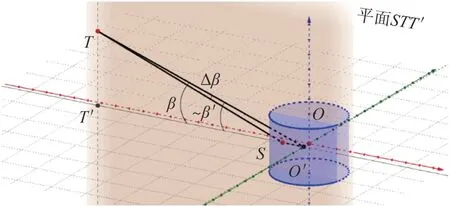
圖6 俯仰角修正示意圖
圖中O′為將激光雷達(dá)中心O向平面STT′投影獲得的垂足。依據(jù)俯仰角定義,有∠TST′=β,近似∠TO′T′≈β′。
在ΔSO′T中應(yīng)用正弦定理,有
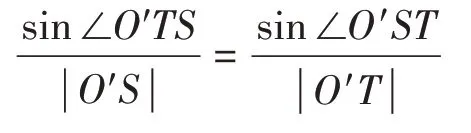
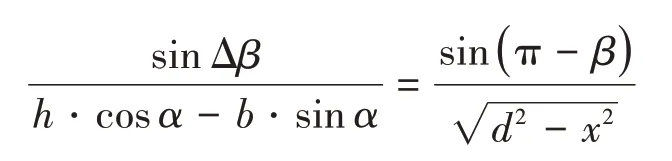
由 于x=d?cosβ′?sinα′≈d?cosβ?sinα,進(jìn)行如下近似:
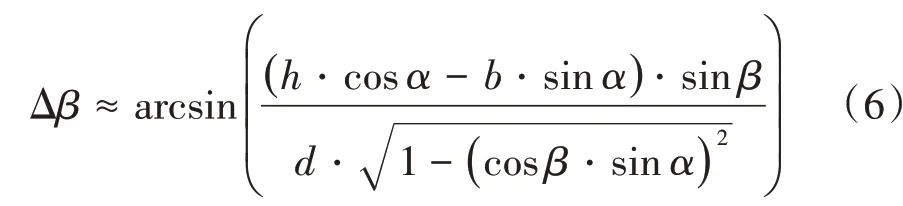
通過式(5)和式(6)可以獲得激光雷達(dá)中心O下的方位角修正量α′和俯仰角β′:

可得角度修正模型為
1.3.2 距離修正模型
在任何旋轉(zhuǎn)角度下的激光雷達(dá)坐標(biāo)系中,T點(diǎn)坐標(biāo)均有如下兩種表達(dá)方式:
其中:d=|OT|;d′=|ST|

由于|OT|2=x2+y2+z2,聯(lián)立可得關(guān)于d′的一元二次方程:d′為該方程的一個(gè)實(shí)根,令B=cosβ?(h?cosα-b?sinα)>0,可得

可得距離修正模型為
2 激光雷達(dá)位姿估計(jì)算法
考慮到上述修正模型的效果難以通過點(diǎn)云直接進(jìn)行定量驗(yàn)證和分析,因此考慮定量評估修正前后點(diǎn)云對于激光雷達(dá)位姿估計(jì)算法的影響,進(jìn)而驗(yàn)證本文提出方法的有效性。
2.1 即時(shí)定位與地圖構(gòu)建技術(shù)簡介
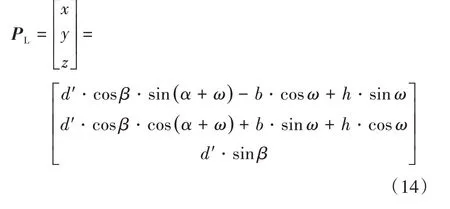
即時(shí)定位與地圖構(gòu)建(simultaneous localization and mapping,SLAM)技術(shù)在高精度地圖構(gòu)建過程中得到廣泛應(yīng)用[17-18]。一個(gè)經(jīng)典的SLAM系統(tǒng)主要由前端、回環(huán)檢測、后端構(gòu)成[19],其系統(tǒng)框圖如圖7所示。
圖7 SLAM算法框圖
圖中,前端負(fù)責(zé)接收并預(yù)處理來自傳感器的數(shù)據(jù),并進(jìn)行特征提取和數(shù)據(jù)關(guān)聯(lián),估計(jì)幀間相對位姿,但是這一步獲得的估計(jì)結(jié)果存在噪聲,經(jīng)過累加會造成軌跡漂移,進(jìn)而造成地圖的結(jié)構(gòu)性錯(cuò)誤。回環(huán)檢測負(fù)責(zé)計(jì)算當(dāng)前場景與歷史場景的相似度,進(jìn)而判斷自身是否返回到之前經(jīng)過的地點(diǎn),為后端提供新的約束,進(jìn)而修正地圖的結(jié)構(gòu)性錯(cuò)誤。后端負(fù)責(zé)接收位姿估計(jì)結(jié)果,并對位姿進(jìn)行最大后驗(yàn)概率(maximum a posteriori,MAP)估計(jì),在高斯噪聲假設(shè)下該問題可以轉(zhuǎn)化為最小二乘問題,通過非線性優(yōu)化的方式進(jìn)行求解[20]。建圖結(jié)果分為度量地圖(metric map)和拓?fù)涞貓D(topologi?cal map),其中度量地圖又可以分為稀疏地圖和稠密地圖[19]。
2.2 LeGO?LOAM位姿估計(jì)算法
2014年,Zhang等人提出激光里程計(jì)和建圖(LiDAR odometry and mapping,LOAM)算法[21-22],將激光SLAM問題分解為高頻低精度的前端激光里程計(jì)和低頻高精度的后端地圖構(gòu)建,較好地兼顧了算法的實(shí)時(shí)性和精度。LOAM算法通過定義的點(diǎn)的曲率值大小將點(diǎn)云中的點(diǎn)分為邊緣點(diǎn)和平面點(diǎn)兩類,如式(15)所示。

2018年,在LOAM算法的基礎(chǔ)上,Shan等人提出LeGO?LOAM算法[23],算法框圖如圖8所示。
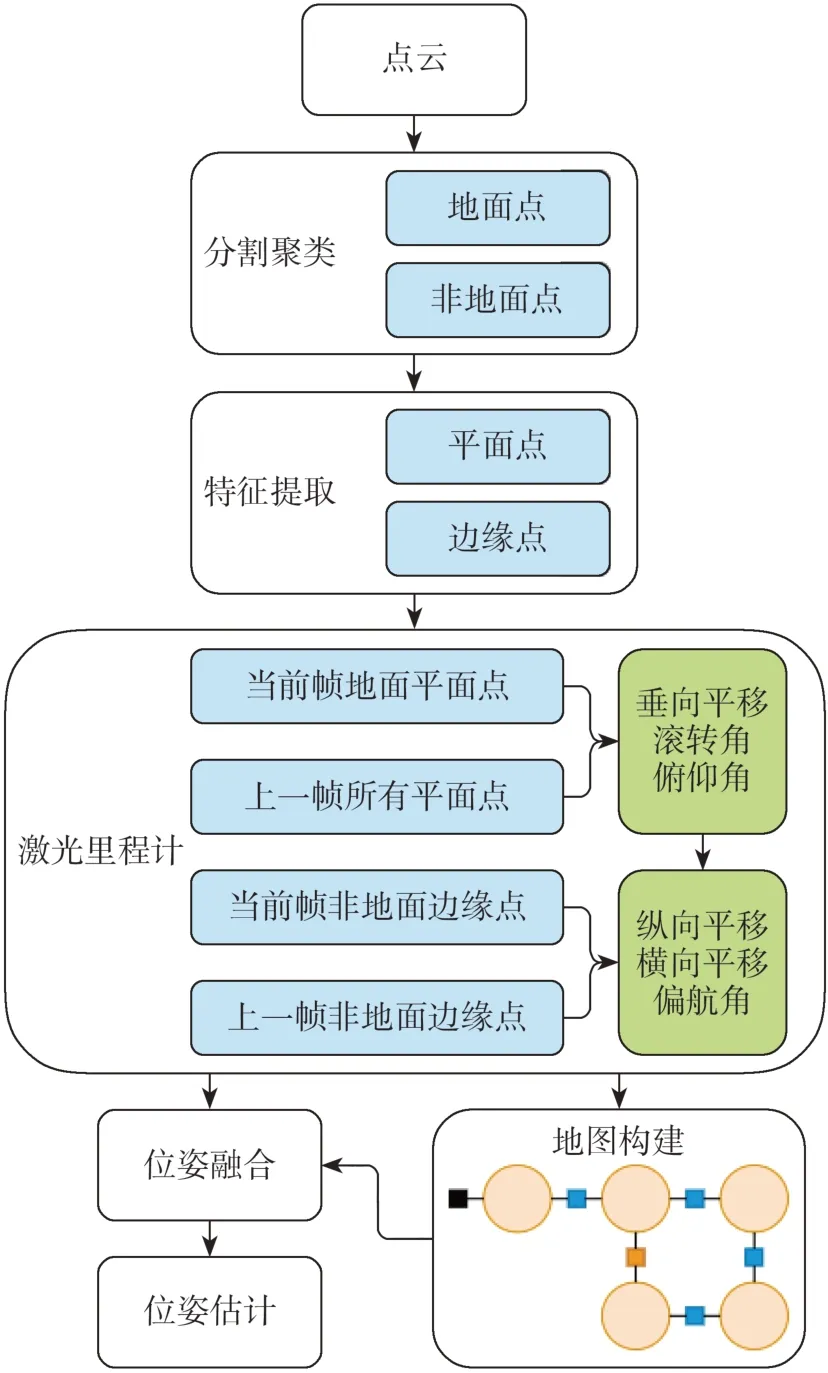
圖8 LeGO?LOAM算法框圖
LeGO?LOAM算法在前端添加了分割聚類模塊,用于提取點(diǎn)云中的地面點(diǎn),并對非地面點(diǎn)進(jìn)行聚類,提高了處理速度和特征提取精度,同時(shí)增強(qiáng)了對于非結(jié)構(gòu)化環(huán)境的魯棒性。沿用了LOAM算法的特征提取和誤差函數(shù)定義方式,在幀間匹配過程中引入地面分割結(jié)果,提高了特征匹配的效率和準(zhǔn)確性,采用雙步列文伯格?馬夸爾特(Levenberg?Marquardt,L?M)算法估計(jì)6自由度位姿。在后端地圖構(gòu)建模塊中采用因子圖優(yōu)化位姿估計(jì)結(jié)果。
2.3 點(diǎn)云誤差對于SLAM算法的影響分析
在實(shí)踐中發(fā)現(xiàn),LeGO?LOAM算法存在較為嚴(yán)重的垂向位姿估計(jì)漂移。通過上述算法框圖可以看出,垂向位姿是通過將當(dāng)前時(shí)刻的地面平面點(diǎn)與上一時(shí)刻的所有平面點(diǎn)進(jìn)行匹配獲得的。匹配過程中的對應(yīng)關(guān)系通過如圖9中所示的方式確定。
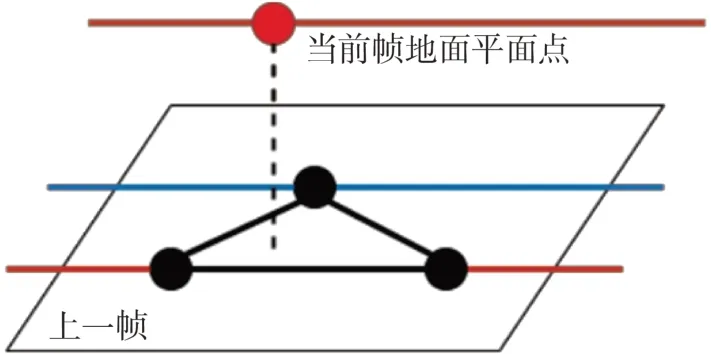
圖9 平面點(diǎn)匹配示意圖
對于當(dāng)前幀中的一個(gè)地面平面點(diǎn),在上一幀中尋找同一線束上與之距離最近的兩個(gè)平面點(diǎn)以及相鄰線束上與之距離最近的一個(gè)平面點(diǎn)。這3個(gè)平面點(diǎn)可以構(gòu)成一個(gè)局部小平面,由此確定點(diǎn)到面的對應(yīng)關(guān)系。通過上述方式確定當(dāng)前幀中所有地面平面點(diǎn)的對應(yīng)關(guān)系,將點(diǎn)到面距離之和作為代價(jià)函數(shù)進(jìn)行優(yōu)化,進(jìn)而獲得位姿估計(jì)結(jié)果。
通過定性分析可知,在點(diǎn)云坐標(biāo)存在誤差的情況下,對應(yīng)局部小平面的位置和法線方向?qū)l(fā)生變化,如圖10所示,會影響代價(jià)函數(shù)計(jì)算,進(jìn)而影響位姿估計(jì)結(jié)果。因此,對于原始點(diǎn)云進(jìn)行修正,減少點(diǎn)云坐標(biāo)誤差,提高地面點(diǎn)云質(zhì)量,對于LeGO?LOAM算法垂向位姿估計(jì)精度有改善作用。
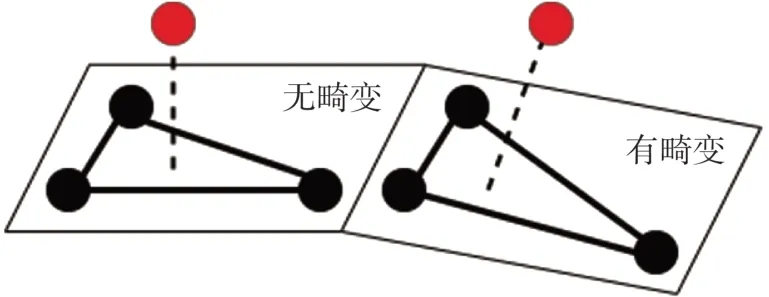
圖10 畸變點(diǎn)云影響示意圖
3 仿真驗(yàn)證
搭建仿真模型對上述修正模型進(jìn)行驗(yàn)證,使用Pandar XT機(jī)械式激光雷達(dá)內(nèi)參進(jìn)行仿真,其中h=30.94 mm、b=13 mm;在32條線束中等間隔地選取線束,獲得其中8條線束參數(shù),如表2所示。
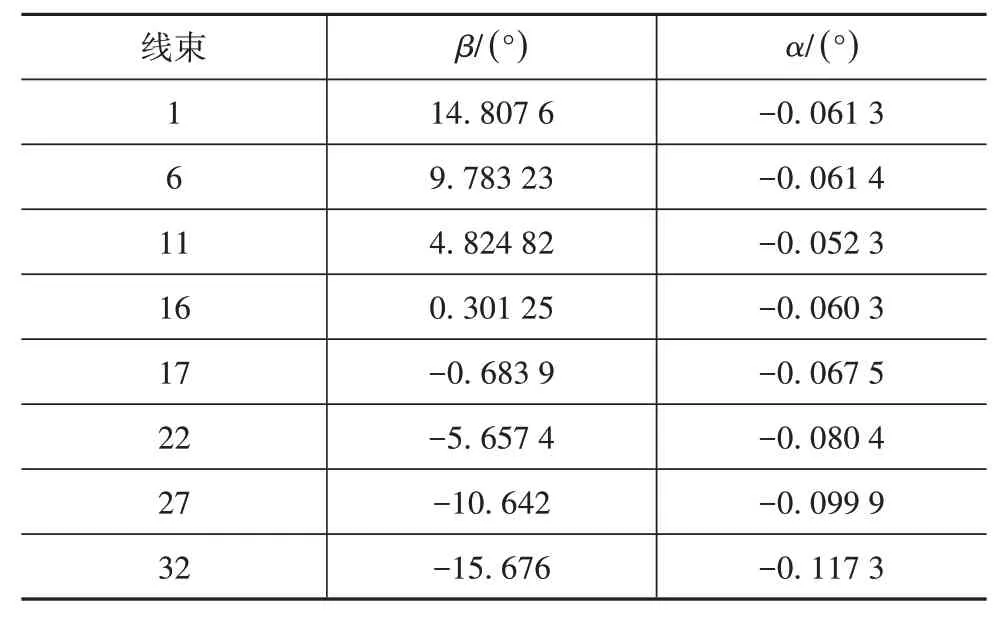
表2 線束參數(shù)選擇
表中俯仰角β向上為正,方位角修正量α正方向與方位角ω相同。
對于每條線束生成0.5~50 m的距離測量值d,按照角度修正和距離修正兩種方式對測量點(diǎn)坐標(biāo)進(jìn)行修正,對修正前后結(jié)果進(jìn)行比較。
3.1 角度修正模型
采用角度修正模型對方位角修正量α和俯仰角β進(jìn)行修正,效果如圖11和圖12所示。
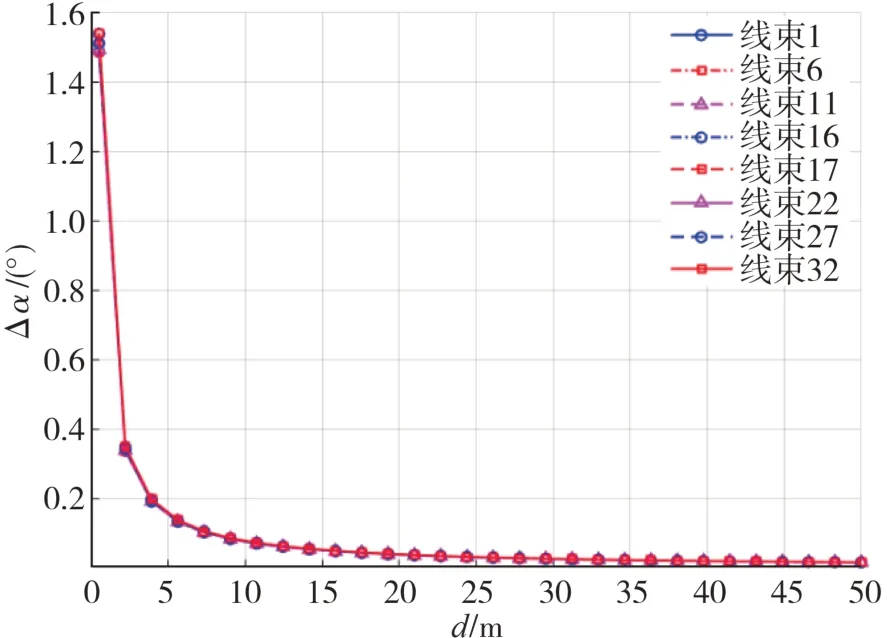
圖11 方位角修正量變化Δα
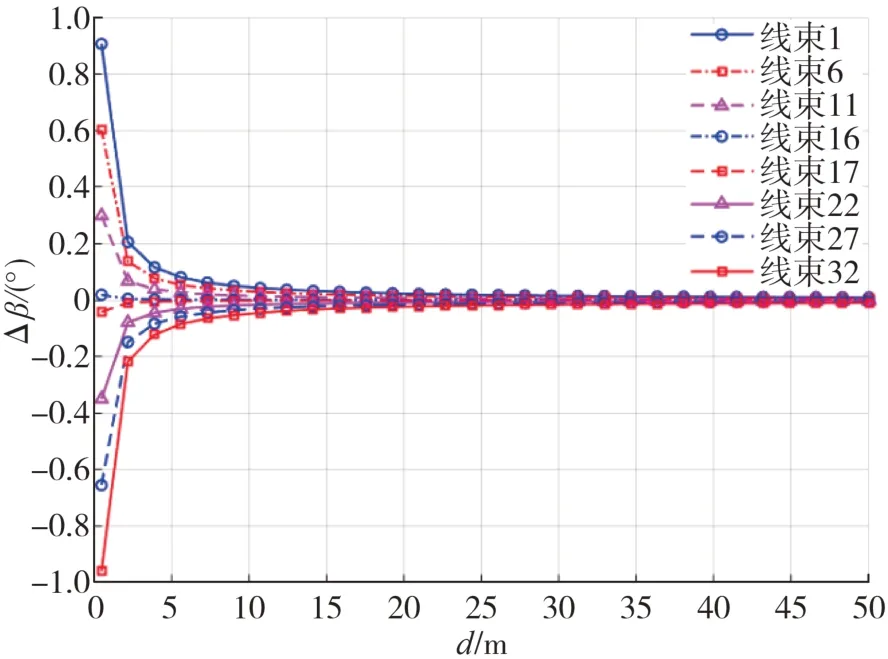
圖12 俯仰角變化Δβ
可以看出:隨著距離增大,對于方位角修正量α的修正效果快速減小,在20 m外修正效果變化不大;從修正效果上來看,不同線束間的修正量大小基本相同。
可以看出:隨著距離增大,對于俯仰角β的修正效果快速減小,在20 m外修正效果變化不大;從修正效果上來看,對于大俯仰角線束的修正效果更加明顯,且修正后點(diǎn)云具有整體向xOy平面靠近的趨勢。
3.2 距離修正模型
采用距離修正模型對于距離測量值d進(jìn)行修正,效果如圖13所示。
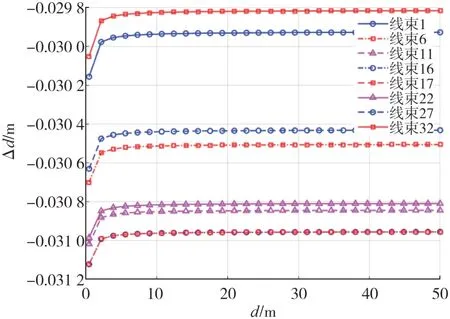
圖13 距離測量值變化Δd
可以看出:隨著距離增大,對于距離測量值d的修正效果快速減小,在5 m外修正效果變化不大;從修正效果上來看,對于大俯仰角線束的修正效果更加明顯,且修正后點(diǎn)云具有整體向原點(diǎn)靠近的趨勢。
4 實(shí)驗(yàn)
實(shí)驗(yàn)中使用的原始點(diǎn)云均通過式(3)中的方法解算獲得,未經(jīng)修正。
4.1 單幀點(diǎn)云修正效果
在標(biāo)定間中放置多個(gè)平面標(biāo)定板,使用激光雷達(dá)采集單幀點(diǎn)云數(shù)據(jù),手動(dòng)選出屬于同一標(biāo)定板的點(diǎn)云,如圖14所示。
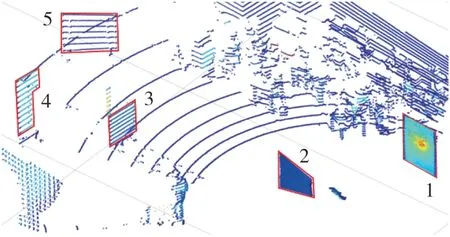
圖14 標(biāo)定板點(diǎn)云
分別對于原始標(biāo)定板點(diǎn)云進(jìn)行角度修正和距離修正,利用M-估計(jì)量樣本一致性(M?estimator sample consensus,MSAC)算法[24]擬合各個(gè)標(biāo)定板的平面參數(shù),之后分別計(jì)算3種條件下各個(gè)平面上的點(diǎn)到擬合平面的平均距離誤差,將其作為平面質(zhì)量的評價(jià)指標(biāo);并計(jì)算激光雷達(dá)到標(biāo)定板的距離,結(jié)果如表3所示。
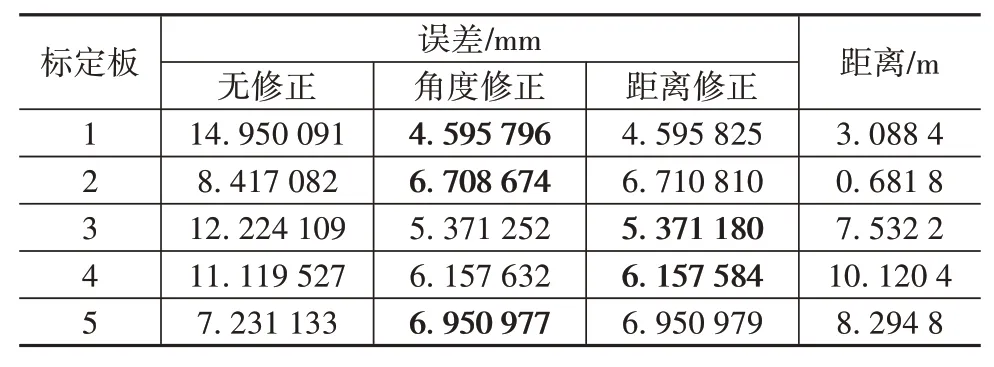
表3 標(biāo)定板平面誤差統(tǒng)計(jì)結(jié)果
可以看出,在使用修正方法后,點(diǎn)云中平面點(diǎn)的質(zhì)量較修正前得到了提高。
4.2 對激光里程計(jì)的影響分析
利用采集車采集3段不同場景中的點(diǎn)云序列,利用GPS/IMU設(shè)備獲得車輛位姿并轉(zhuǎn)換到激光雷達(dá)坐標(biāo)系下作為位姿真值,其基本信息如表4所示。
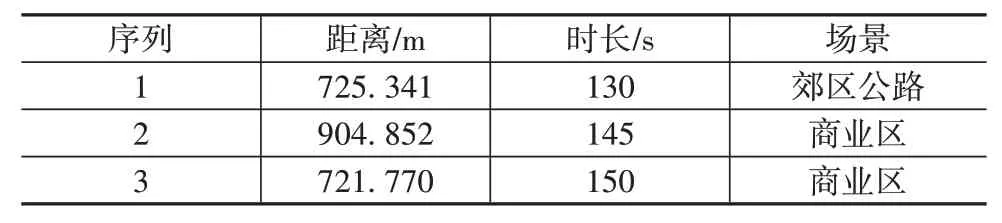
表4 點(diǎn)云序列基本信息
由于實(shí)際采集點(diǎn)云的xy坐標(biāo)存在較大運(yùn)動(dòng)畸變,考慮僅對于點(diǎn)云的z坐標(biāo)進(jìn)行修正。使用原始點(diǎn)云、角度修正點(diǎn)云和距離修正點(diǎn)云運(yùn)行LeGO?LOAM算法,并定量評估激光里程計(jì)的精度,結(jié)果如圖15所示。
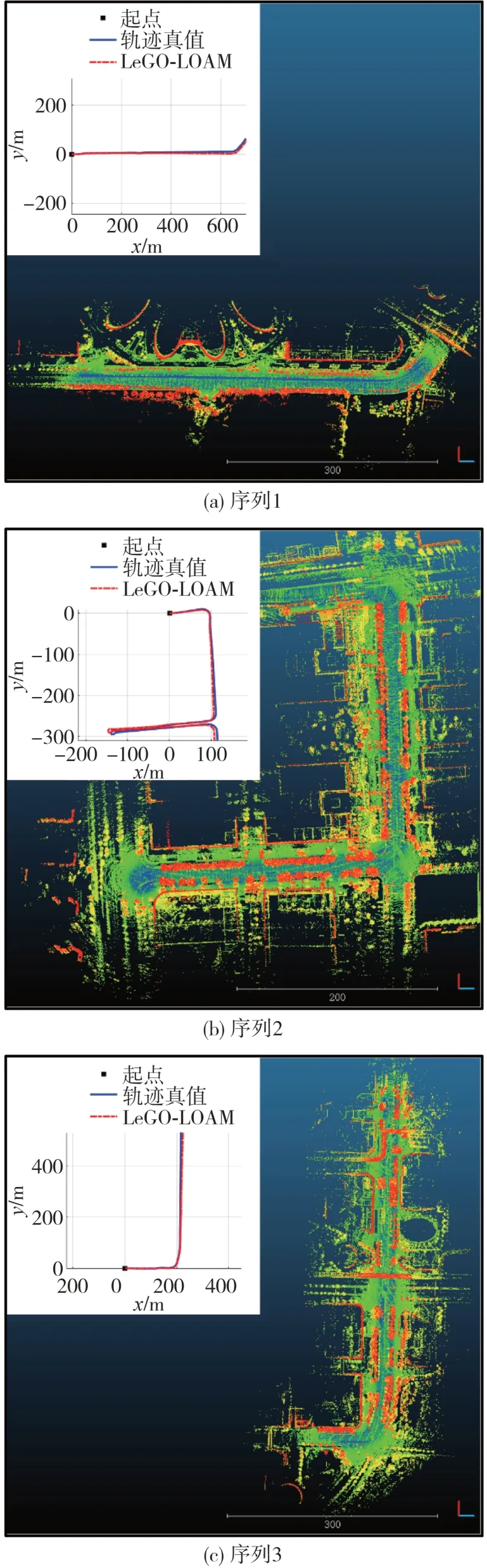
圖15 里程計(jì)和建圖結(jié)果
在評價(jià)指標(biāo)上,選擇絕對位姿誤差(absolute pose error,APE)和相對位姿誤差(relative pose er?ror,RPE),計(jì)算公式為
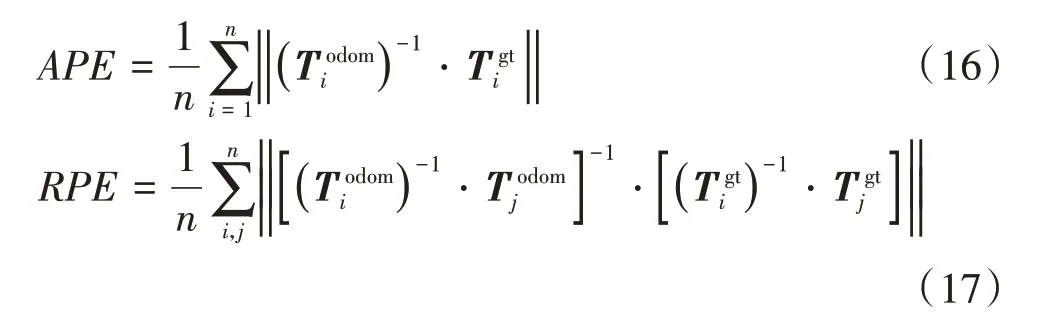
按照式(16)計(jì)算絕對位姿誤差,結(jié)果如表5所示。
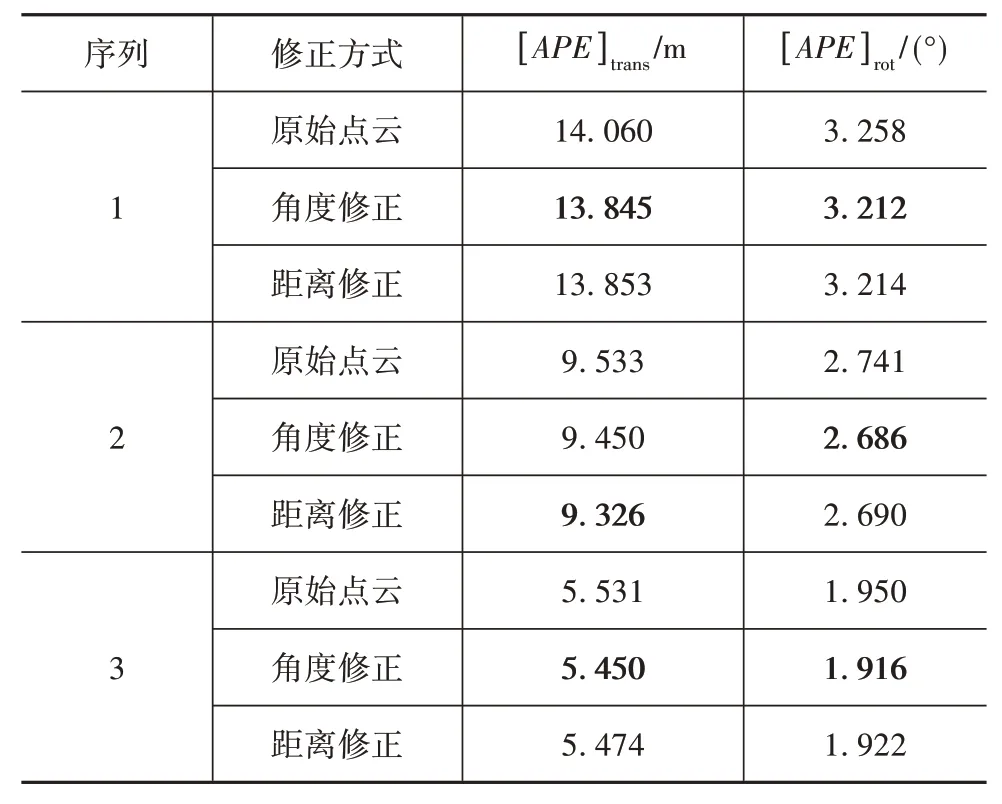
表5 絕對位姿誤差統(tǒng)計(jì)結(jié)果
可以看出,使用修正后的點(diǎn)云獲得的絕對位姿誤差的平移和旋轉(zhuǎn)部分均小于原始點(diǎn)云組,說明對于原始點(diǎn)云進(jìn)行修正可以提高位姿估計(jì)精度。
絕對位姿誤差反映了單個(gè)位姿估計(jì)結(jié)果與位姿真值之間的差距,受到位姿估計(jì)結(jié)果漂移的影響較大;相對位姿誤差反映了一段時(shí)間或路程下的位姿估計(jì)增量與位姿真值增量之間的差距,用于評估里程計(jì)精度更加合適。對于相對位姿誤差,采用KITTI數(shù)據(jù)集的方式進(jìn)行處理[25],選擇軌跡中所有長度為100,200,…,600 m的位姿片段按照式(17)分別計(jì)算原始點(diǎn)云、角度修正和距離修正條件下在不同距離上的相對位姿誤差,這樣做是為了通過長距離來消除GPS/IMU設(shè)備在單一位置處定位誤差對于里程計(jì)精度評估結(jié)果的影響。相對位姿誤差結(jié)果整理如圖16所示,將平移部分誤差和旋轉(zhuǎn)部分誤差分別列出,其中左側(cè)縱坐標(biāo)對應(yīng)的條形圖表示原始點(diǎn)云結(jié)果,右側(cè)縱坐標(biāo)對應(yīng)的折線圖表示角度修正和距離修正后結(jié)果的變化情況。
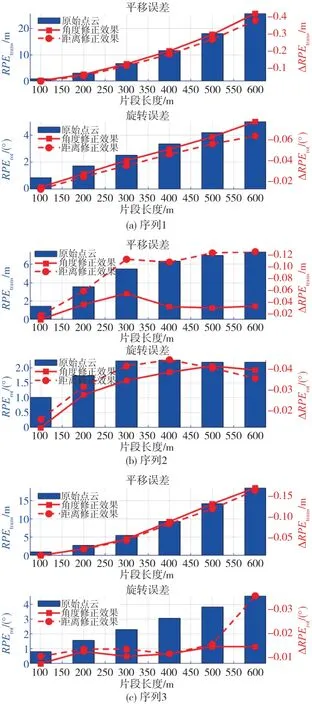
圖16 相對位姿誤差
之后,將每個(gè)相對位姿誤差相對于片段長度歸一化后再取平均,獲得里程計(jì)的平移部分誤差以及旋轉(zhuǎn)部分誤差,計(jì)算公式為
式中:Etrans代表平移部分誤差,%;Erot代表旋轉(zhuǎn)部分誤差,(°)/m。
按照式(18)和式(19)計(jì)算出里程計(jì)的平移部分誤差和旋轉(zhuǎn)部分誤差,結(jié)果如表6所示。
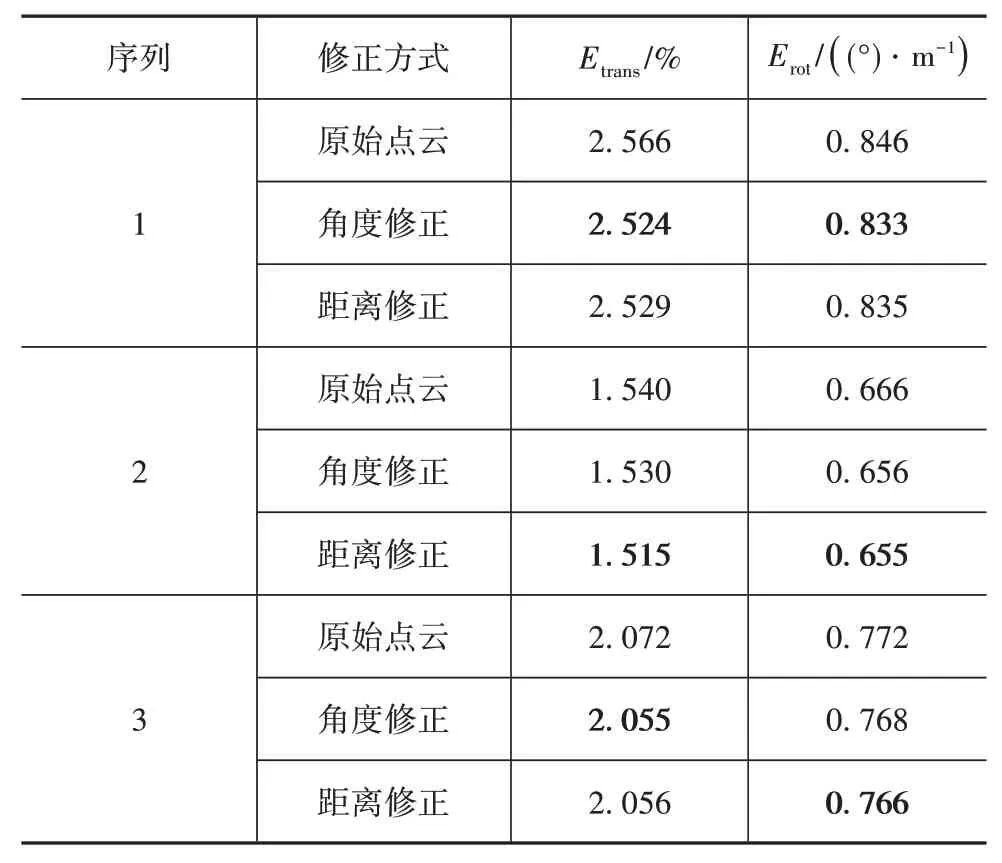
表6 里程計(jì)誤差統(tǒng)計(jì)結(jié)果
可以看出,使用修正后的點(diǎn)云獲得的平移和旋轉(zhuǎn)誤差均小于原始點(diǎn)云組,說明對于原始點(diǎn)云進(jìn)行修正對于減小激光里程計(jì)誤差有改善作用。
最后,考慮到修正算法需要對點(diǎn)云中每個(gè)點(diǎn)進(jìn)行處理,會帶來計(jì)算資源的額外消耗和計(jì)算時(shí)間的增加,因此分析修正算法對實(shí)時(shí)性的影響。實(shí)驗(yàn)中點(diǎn)云修正發(fā)生在LeGO?LOAM算法的特征提取模塊中,因此分別統(tǒng)計(jì)該模塊在使用原始點(diǎn)云、角度修正和距離修正方式下的單幀計(jì)算時(shí)間,結(jié)果如圖17所示。
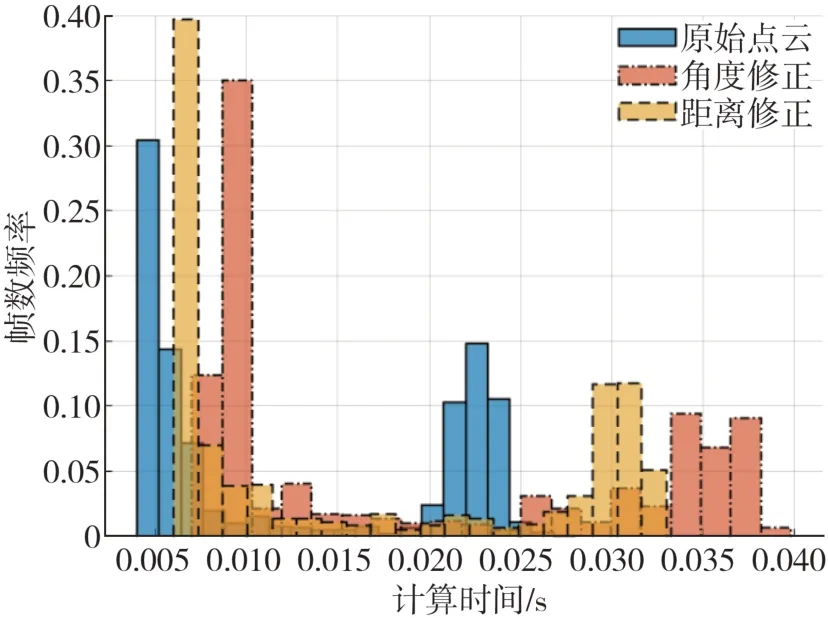
圖17 單幀計(jì)算時(shí)間統(tǒng)計(jì)
分別計(jì)算3種條件下單幀計(jì)算時(shí)間的最小值、最大值和平均值,結(jié)果如表7所示。

表7 修正算法對于實(shí)時(shí)性的影響
可以看出:使用角度修正算法的平均單幀計(jì)算時(shí)間最長,距離修正算法次之;但是從平均值來看兩種修正算法導(dǎo)致單幀處理時(shí)間的增加均小于0.01 s,因此可以認(rèn)為修正算法對于實(shí)時(shí)性的影響不大。
5 結(jié)論
本文中根據(jù)Pandar XT機(jī)械式激光雷達(dá)的結(jié)構(gòu)和工作原理,提出一種內(nèi)參建模方法,通過引入激光雷達(dá)結(jié)構(gòu)參數(shù)減少了模型參數(shù)量。考慮激光雷達(dá)偏心結(jié)構(gòu)對點(diǎn)云的影響,本文中提出角度修正和距離修正兩種點(diǎn)云修正方法。通過仿真模擬兩種方法的修正效果,并通過實(shí)際采集點(diǎn)云進(jìn)行驗(yàn)證。最后通過LeGO-LOAM位姿估計(jì)算法進(jìn)行驗(yàn)證,證明使用修正后的點(diǎn)云對于減小位姿估計(jì)誤差和里程計(jì)誤差有改善作用。
從實(shí)際應(yīng)用角度,部分激光SLAM算法需要激光雷達(dá)的俯仰角β作為算法參數(shù)輸入。因此,為方便使用,應(yīng)盡量采用距離修正方式以保證出廠前標(biāo)定的俯仰角β不變。對于大尺寸激光雷達(dá)(b和h數(shù)值較大)、大俯仰角(β數(shù)值較大)、近距離測距(例如激光雷達(dá)斜裝在車頂)的情況下,偏心結(jié)構(gòu)帶來的影響愈加不能忽視,修正模型帶來的影響將更加顯著。
后續(xù)工作中將考慮將該內(nèi)參模型推廣到具有類似結(jié)構(gòu)的機(jī)械式激光雷達(dá)型號中,并對于其他來源的誤差進(jìn)行建模;并設(shè)計(jì)針對內(nèi)參的自動(dòng)化標(biāo)定方法。