數字圖像重建的三維圖像自動化視覺傳達優化系統
2021-08-29 08:33:36劉潤紅
制造業自動化 2021年8期
關鍵詞:系統
劉潤紅
(鄭州師范學院,鄭州 450000)
0 引言
圖像重建技術可在數字處理手段的支持下,通過測量物體外部數據的方式,獲得與該三維物體相關的物理形狀信息,其大體執行環節由投影重建、形狀恢復、視覺重建、激光測距等多個步驟共同組成。應用掃描激光對物體景觀進行測距處理時,首先會獲得一系列的三維數據,然后經過多次坐標換算,直至準確恢復該物體的所有三維形狀數值。大多數情況下,圖像重建技術的測距能力極為準確,若采用固定激光源,則可令物體處于轉動狀態,并在多次升降操作后,錄取各個剖面中所包含的三維數據,以用于三維圖像的后續重建;若采用移動光源,則可將物體固定在一個錐形區域內,并在前視掃描儀的作用下,獲得多組三維數據參量[1]。
在自動化視覺傳達領域中,數字圖像三維影像感觀重建總是受到多個建模條件的限制影響,一方面會導致重建后圖像出現不完整或破損的情況,另一方面也會導致圖像節點的分辨率水平持續下降。傳統視覺傳達系統借助高斯濾波模型提取關鍵的影像特征點,再利用深度攝像機與圖像處理器完成對三維數字影像的重建與維護。然而此系統的重建能力有限,并不能實現對圖像節點分辨率水平的有效提升。為解決此問題,設計基于數字圖像重建的三維圖像自動化視覺傳達優化系統,在紅外實感攝像頭、圖像傳感器等多個硬件設備結構體的支持下,對三維數字圖像的分辨率水平進行初步估計,再以此為基礎,計算時域松弛因子的具體數值結果。
1 數字圖像重建的三維去霧處理
數字圖像重建的三維去霧處理由圖像分辨率估計、重建節點迭代修正、時域松弛因子計算三個步驟共同組成,具體操作方法如下。
1.1 三維數字圖像的分辨率估計
三維數字圖像重建理論指出分辨率初始節點的選擇應是任意的,在實際成像空間中,所有元素都可被視為估算初始點。實際操作過程中,為了簡便且快捷地計算得出三維數字圖像的分辨率數值,通常采取單獨放大某一特定幀分辨率圖像的處理方法,并將該物理幀節點定義為三維數字圖像的參考幀,在后續視覺處理環節中,參考幀可用來構造分辨率水平更高的三維數字圖像[2]。在自動化視覺傳達系統中,重建所有數字圖像都應以參考幀條件作為基礎。規定在保持原始序列形式的三維圖像中,參考幀節點的分辨率水平能夠反映重建后圖像的分辨率水平均值。設x1、x2分別代表兩個不同的參考幀節點橫坐標,y1、y2分別代表兩個不同的參考幀節點縱坐標,在上述指標參量值對應匹配為節點(x1,x2)、節點(x2,y2)的情況下,可將三維數字圖像的分辨率估計結果表示為:
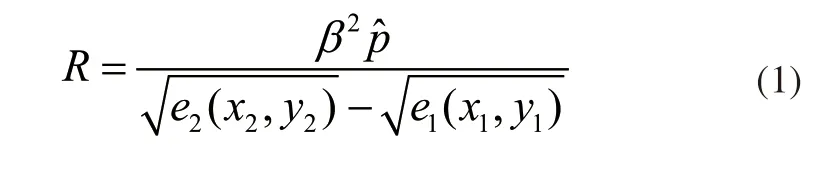
其中,e1、e2分別代表兩個不同的三維節點判別系數,β代表重建后三維圖像的成像條件,p?代表三維圖像的成像特征值。
1.2 重建節點的迭代修正
數字圖像重建節點迭代修正的另一個核心問題就是完成基于視覺傳達的圖像信息搜索,該項操作是指如何在指定區域內,選取多個與迭代修正行為相關的節點匹配位置。搜索策略的應用能夠較好解決三維數字圖像分辨率水平過低的問題,并可以此為基礎,實現對自動化節點的按需分配。在已知三維數字圖像分辨率估計結果的基礎上,重建節點的迭代修正就是針對成像空間進行連續性約束投影的處理過程[3]。因此,數字圖像重建節點迭代修正處理應以構造信息參考集為首要目標,在后續處理過程中,可將已有先驗約束信息填充到原始參考集合中,從而完成對節點參量結果的修正與維護處理。設tmax代表最大的三維圖像信息搜索權限值,tmin代表最小的三維圖像信息搜索權限值,聯立式(1),可將數字圖像重建節點的迭代修正結果表示為:
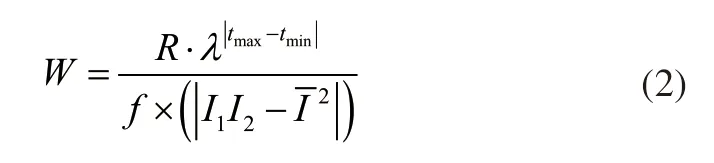
式中,λ為重建后數字圖像的三維區域劃分系數,f為基于視覺傳達的自動化節點分配條件,I1、I2為兩個不同的自動化節點位移矢量值,為I1與I2系數的均值結果。
1.3 時域松弛因子計算
三維數字圖像重建質量受到視覺傳達節點運動估計誤差等多個物理條件的共同影響,其他因素諸如隨機噪聲值、圖像節點偏移等也會導致重建后圖像的質量水平嚴重下降,因此僅參考重建節點的迭代修正結果是遠遠不夠的。基于此提出時域松弛因子的計算思想,一般情況下,當參考幀距離觀測幀較遠時,重建后三維數字圖像的時域松弛因子數值相對較小,即參考幀與觀測幀的差異值水平較小;當參考幀距離觀測幀較近時,重建后三維數字圖像的時域松弛因子數值相對較大,即參考幀與觀測幀的差異值水平較大[4]。相對于其他應用思想而言,時域松弛因子可為三維數字圖像重建提供更多的參考幀信息參量,從而實現對自動化視覺傳達系統的優化處理。設s1、s2分別代表兩個不同的參考幀定義項,聯立式(2),可將時域松弛因子計算結果表示為:
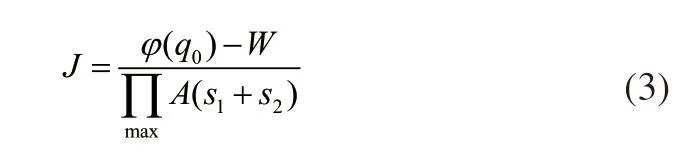
其中,A代表參考幀節點與觀測幀節點間的距離系數,q0代表觀測幀節點定義項,代表基于觀測幀節點的三維圖像重建指征。
2 三維圖像自動化視覺傳達系統的設計及優化
按照數字圖像重建的三維去霧處理需求,按需連接紅外實感攝像頭、圖像傳感器與視覺傳達處理設備,實現三維圖像自動化視覺傳達系統的設計及優化。
2.1 紅外實感攝像頭
紅外實感攝像頭負責三維圖像的采集,可在同一時間點獲取多個連續的視覺影像,并可按照圖像中重建節點間色彩數據的配比關系,對原始數據圖像進行重建與融合處理。在原有的自動化視覺傳達系統中,深度攝像機只能采集到黑白或單色的圖像信息,且這些信息參量也只能短暫存儲于系統數據庫主機之中[5]。為從根本上減輕數據庫主機的存儲壓力,自動化視覺傳達優化系統采用紅外實感攝像頭對三維圖像信息進行采集,一方面可按照數據參量間的色彩配比關系,安排其重建處理行為的執行方向,另一方面也可通過紅外測定的方式,判斷相關節點處的數字圖像分辨率水平,從而使得修正后的迭代系數能夠更好應用于三維圖像節點重建的處理過程中。
圖1 紅外實感攝像頭示意圖
2.2 圖像傳感器
三維圖像傳感器可用于穩定多個紅外實感攝像頭之間的物理連接關系,在進行數字圖像的深度拍攝時,基礎傳感模塊與影像傳感器主機同步開啟連接狀態,可在維持三維數字圖像原始分辨率水平的同時,實現對自動化視覺傳達優化系統執行環境的有效維護。三維傳感模塊能夠準確記錄重建后圖像的時域松弛因子數值,并可遵照重建節點的迭代修正結果,探測現有處理圖像的平均分辨率水平。影像傳感器則具備較強的輔助執行能力,可對紅外實感攝像頭所采集到的連續圖像信息進行二次處理,并從中篩選、剔除非必要的顏色信息參量,從而使得重建后數字圖像具備更高的視覺傳達能力。
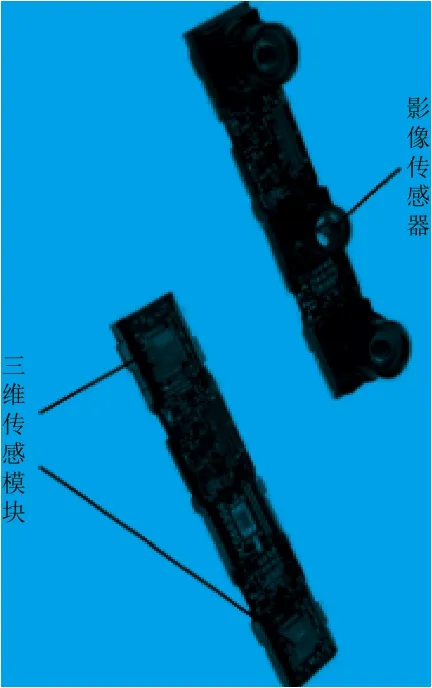
圖2 三維圖像傳感器示意圖
2.3 視覺傳達處理設備
視覺傳達處理設備作為數字圖像重建處理的關鍵執行元件,可在紅外實感攝像頭、圖像傳感器兩類硬件設備結構體的支持下,對三維圖像節點的分辨率水平進行檢測與跟蹤,從而使得系統顯示屏幕中圖像信息參量的存在形式得以豐富。傳統視覺傳達系統中只存在JPG一種格式的數字圖像,隨視覺傳達指令的不斷執行,原圖像的分辨率水平會不斷下降,直至最終輸出圖像的清晰度受到嚴重影響[6]。新型自動化視覺傳達優化系統中增設了RCB格式的數字圖像,這種圖像信息在原始圖像的基礎上,針對三維節點分辨率水平較低的問題進行改進,不僅解決了紅外實感攝像頭在圖像信息采集過程中可能出現的物理晃動問題,也可實現對圖像信息文件的長期存儲。
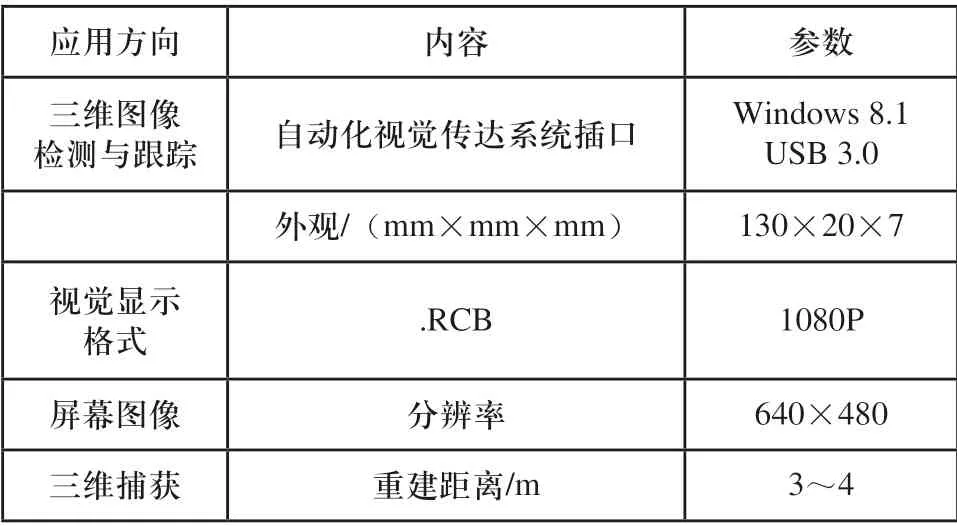
表1 視覺傳達處理設備參數設定
3 系統實用能力測試
為驗證數字圖像重建三維圖像自動化視覺傳達優化系統的應用可行性,設定如下測試環節,通過對比重建后圖像的平均分辨率水平,來判斷實驗組、對照組系統的實際應用能力,其中實驗組主機平臺搭載基于數字圖像重建的三維圖像自動化視覺傳達優化系統,對照組主機平臺搭載傳統視覺傳達系統。
遵循三維數字圖像信息的提取結果,構建如圖3所示重建測試平臺,以3D制作設備、影像編輯工具、專業引擎元件作為實驗基礎,在C語言開發軟件的支持下,采用多構架網絡對三維圖像數據信息進行傳輸處理,從而使其時效性及完整性得到有效保障。
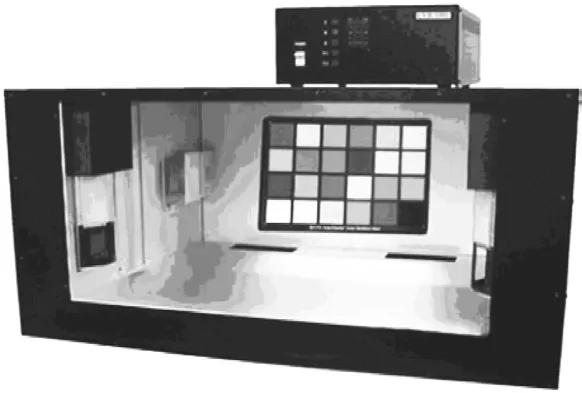
圖3 影像重建測試平臺
表2記錄了重建后三維數字圖像的理想分辨率數值、實驗組分辨率數值及對照組分辨率數值。
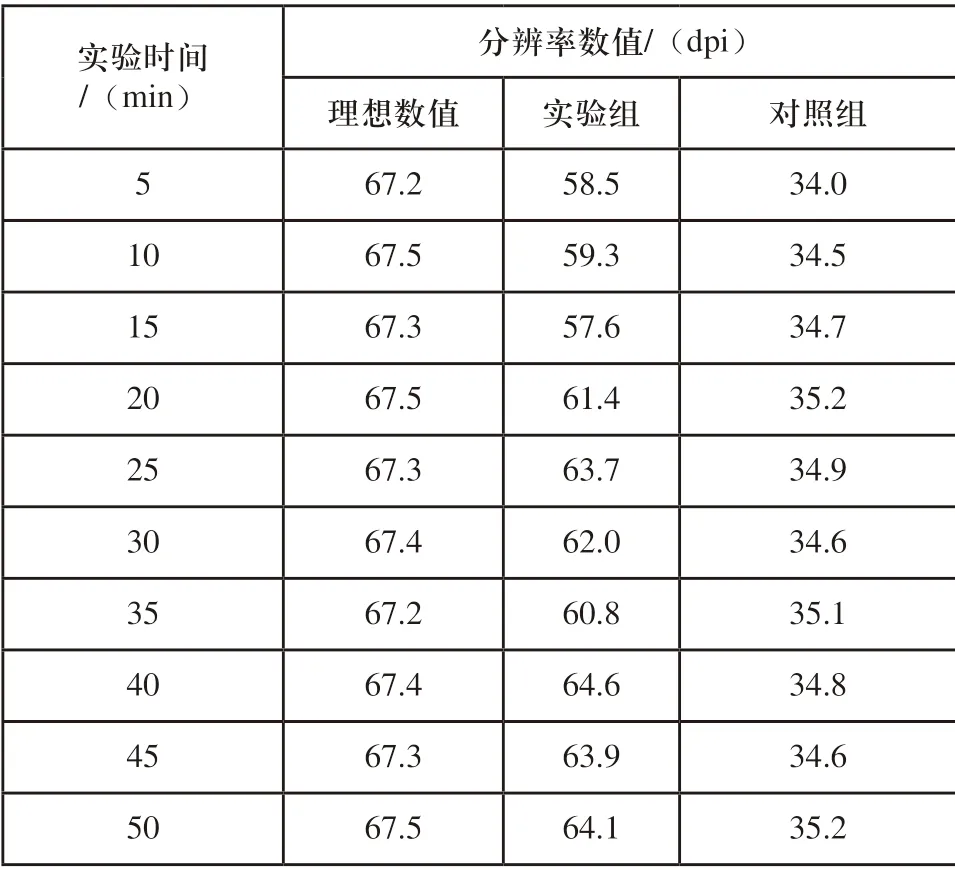
表2 分辨率數值對比
理想情況下,重建后三維數值圖像的分辨率最小值為67.2dpi、最大值為67.5dpi,剩余記錄數值則始終在該物理區間內來回波動變化。實驗組重建后三維數值圖像的分辨率最小值為57.6dpi、最大值為64.6dpi,與理想情況相比,其數值波動區間雖然明顯增大、平均數值水平也出現了下降,但其實際記錄數值已經在不斷向著理想化數值結果靠近。對照組三維數值圖像的分辨率最小值為34.0dpi、最大值為35.2dpi,與理想情況相比,其數值波動區間雖然沒有明顯變化,但其均值水平卻出現了明顯下降的變化趨勢,也遠不及實驗組的數值記錄結果。
QSI指標能夠反映視覺傳達系統所具備的圖像去霧能力,通常情況下,QSI指標數值越大,視覺傳達系統所具備的圖像去霧能力也就越強。下表記錄了實驗組、對照組QSI指標數值的實際變化情況。
表3中,實驗組QSI指標在前35min的實驗時間內,一直維持不斷上升的數值變化趨勢,但中后期這種數值上升的變化幅度明顯減小,從第40min開始,實驗組QSI指標的數值變化趨勢開始逐漸趨于穩定。對照組QSI指標在整個實驗過程中,始終保持不斷下降的數值變化趨勢,但實驗后期的下降幅度明顯小于實驗前期,全局最大數值結果達到了60.7%,與實驗組最大值88.3%相比,下降了27.6%。
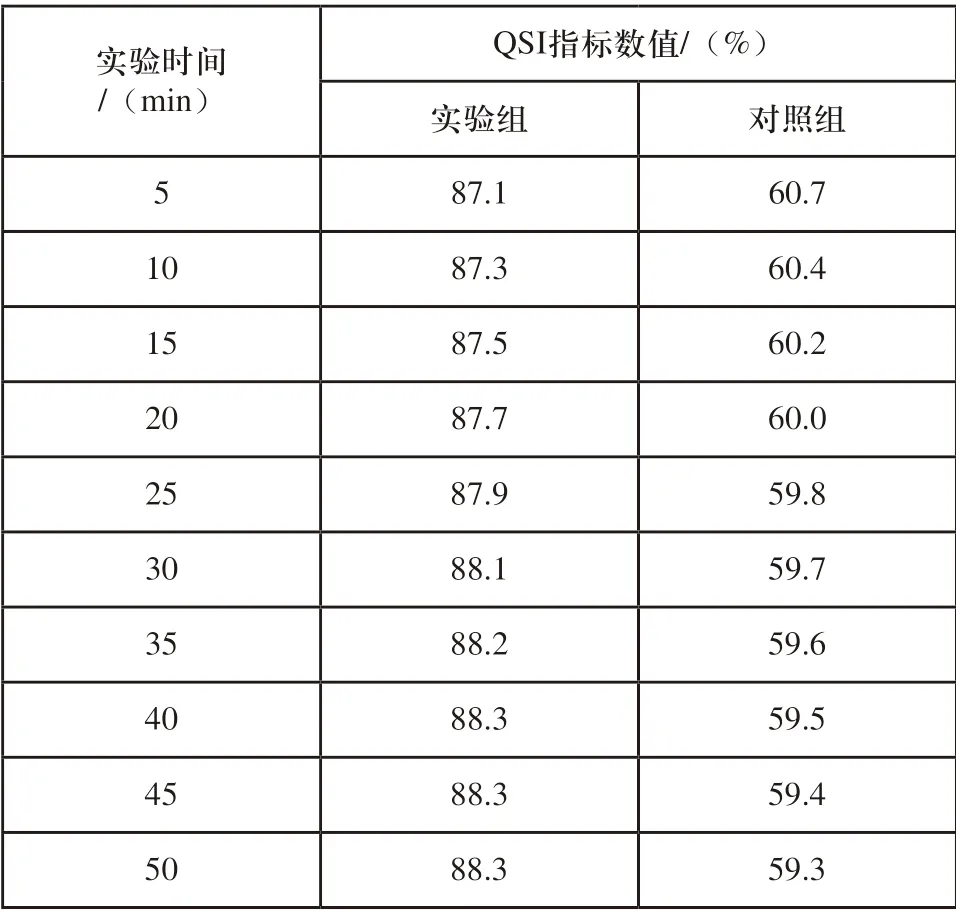
表3 QSI指標數值
總結上述所有數值記錄結果可知,應用三維圖像自動化視覺傳達優化系統后,數值重建圖像的分辨率數值水平得到了有效保障,且QSI指標數值也開始不斷提升,能夠較好地實現對待重建圖像的去霧化處理。
4 結語
三維圖像自動化視覺傳達優化系統在傳統視覺傳達系統的基礎上,針對重建后數字圖像的分辨率數值進行初步估計,又聯合重建節點的迭代修正結果,對時域松弛因子進行精準計算。由于紅外實感攝像頭、圖像傳感器等多個硬件設備結構體元件的接入,視覺傳達處理設備可對各級數字圖像信息進行同步處理與協調,一方面實現了對數字化圖像的重建與處理,另一方面也可滿足準確監測自動化節點處三維圖像分辨率水平的實際應用需求。在三維重建思想的作用下,數字圖像的復原與修復成為了可能,不僅能夠彌補視覺傳達思想在應用方面的不足之處,也可有效抑制圖像起霧行為的出現。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
