基于線驅動原理的3T1R并聯機器人運動參數分析
2021-08-29 08:33:50焦迎雪聶秀珍
制造業自動化 2021年8期
關鍵詞:方法
焦迎雪,聶秀珍
(山西鐵道職業技術學院,太原 030013)
0 引言
科學技術的發展,給生產活動帶來的新的發展動力,傳統生產活動的進行主要通過人力來完成,當面對大型生產活動時,人力生產不僅效率低,質量也相對較低,無法達到高精度的程度,更重要的是危險的生產活動會給人們的生命安全帶來威脅。在此背景下,科學技術的發展使得生產活動逐漸向著智能化、自動化和機械化方向發展,其中機器人是出現和使用就是自動化生產的典型代表。3T1R并聯機器人是現代化生產中最常用的一種。3T1R并聯機器人,即三平移一轉動機器人,具有剛度強、速度快、承載能力強等優點,在分揀、搬運、上下料、定位裝配等領域發揮了重要的作用[1]。通過應用領域可知,該類機器人對運動參數的控制要求較高。
關于并聯機器人運動參數的分析方法有很多,如基于模糊理論的方法,該方法通過模糊推理將控制量轉化為控制輸出,為機器人提供運動參數。這種方法不需要建立精確的控制模型,且魯棒性較強,但是面對精細化程度較高物體,得出的控制參數精準度不夠。基于PID的方法。這種方法的控制精度較高,但是適用性不強,其得出的控制參數只適用其對應的物體操作控制,而且其參數需要整定。
結合前人研究經驗,針對以往控制方法存在的缺點,提出一種基于線驅動原理的3T1R并聯機器人運動參數分析方法。該方法以線驅動原理為基礎,通過明確線性驅動器輸出量與3T1R并聯機器人運動參數之間的線性關系來獲取運動數值。最后將該分析方法應用到一個3T1R并聯機器人運動控制當中,檢驗運動參數與預期參數之間的誤差,以此分析得出分析方法的精度。通過本研究以期提高3T1R并聯機器人工作質量[2]。
1 3T1R并聯機器人運動參數分析方法
3T1R并聯機器人是一種自由度較高的智能機器人,主要用于分揀、包裝、上下料、搬運等工作當中。3T1R并聯機器人由動平臺、靜平臺、無約束支鏈、混合支鏈、控制器以及驅動器組成。在3T1R并聯機器人整個工作過程中,通過控制器推算得出3T1R并聯機器人的運動參數,然后以此控制線性驅動器驅動機械手/臂完成抓取、移動、投放等動作。由此可知,3T1R并聯機器人運動參數的推算工作至關重要,推算的越準確,3T1R并聯機器人的動作精度越高。基于此,提出一種基于線驅動原理的3T1R并聯機器人運動參數分析法。
1.1 線性驅動器運行參量采集
3T1R并聯機器是在線性驅動器的驅動下執行相關動作的,因此線性驅動器與3T1R并聯機器之間存在很明顯的線性關系,即一方發生改變,另一方也隨之發生改變的現象。線性驅動器,也被稱為交流伺服驅動器,主要負責3T1R并聯機器人三個參數的控制,即運動速度、運動位置以及運動力矩[3]。這三個控制量的采集就是后續3T1R并聯機器人運動參數得出的關鍵。基于此,參數的獲取首先要對線性驅動器的三個參量進行采集。
目前,基于現有的技術,傳感器采集是最常用的手段。根據需要采集的參量的不同,選擇的傳感器類型為位移傳感器、速度傳感器以及電流互感器。這些參量采集到之后,轉換為數字信號,這些數字信號受到采集環境以及傳感器本身影響,其信號中會存在大量的噪聲,影響了后期運動參數推算結果的準確性。為此,需要對這些噪聲進行去除。在這里采用一種混合的去噪方法進行去噪,該方法中包括了三種方法,即獨立分量分析法、經驗模態分解法以及小波閾值去噪方法。該方法具體過程如下:
步驟1:將包含噪聲數字信號a劃分為m個頻段;
步驟2:對m段信號進行平移拼接;
步驟3:將平移拼接處理后的m維信號作為獨立分量分析的輸入通道信號;
步驟4:利用獨立分量分析法對信號進行盲源分離,得到初步去噪信號。
步驟5:將初步去噪信號進行經驗模態分解,分解公式如下:
得到n個IMF分量和1個殘差rn(t)。其中,c(t)被稱為IMF分量。
步驟6:源信號主要集中在第1個和第2個IMF分量當中,因此只保留這兩個IMF分量。
步驟7:利用小波閾值法對第1個和第2個IMF分量進行去噪。具體過程如下:
step1:利用小波變換將IMF分量變換到小波域,得到小波分解系數;
step2:利用選擇的閾值函數對小波分解系數進行處理,得到小波估計系數。閾值函數形式如下:
式中,sgn()代表符號函數;a代表閾值;x代表信號。
step3:選擇小波分解系數與小波估計系數相減絕對值的最小值;
step4:進行小波重構,得到去噪后信號。
1.2 3T1R并聯機器人數學建模
本章節為方便后續分析與計算,本章節建立關于3T1R并聯機器人數學模型。該模型建立的主要通過Matlab軟件當中的Simulink工具來進行,建模過程如下:
步驟1:登錄Matlab軟件,選擇Simulink工具模塊;
步驟2:啟動Simulink工具;
步驟3:畫出3T1R并聯機器人的各個組成模塊;
步驟4:在組成模塊上添加3T1R并聯機器相關參數;
步驟5:根據各個模塊之間的連接關系,畫出所有模塊之間的連接線;
步驟6:指定輸入、輸出端子。
基于建立好的3T1R并聯機器人數學模型,即可投入使用。開始時,模型設定初始狀態和輸出,接下來的每一個時間步中,Simulink計算并聯機器人的輸入、狀態和輸出,并更新模型來反映計算出的值。結束時,模型得出相應的輸入、狀態和輸出[4]。
1.3 3T1R并聯機器人運動參數計算
基于上述兩個步驟的研究,接下來進入最后關鍵的一步,計算3T1R并聯機器人運動參數。在這里需要利用改進后的PID算法來進行。
PID算法的計算能力是實現線性驅動器與3T1R并聯機器人線性連接的關鍵,主要通過PID的比例、積分、微分計算,推算出3T1R并聯機器人運動參數。PID工作原理是通過線性驅動器實際輸出和預期輸出之間誤差,在比例、積分、微分的運算下,得出3T1R并聯機器人運動參數。
線性驅動器實際輸出和預期輸出之間誤差計算公式如下:

式中,e(t)代表誤差;r(t)代表線性驅動器預期輸出;h(t)代表線性驅動器實際輸出。
根據e(t)進行比例、積分、微分計算,得出3T1R并聯機器人運動控制參數。計算公式如下:

式中,s(t)代表PID輸出的并聯機器人運動控制參數;KP、Kd分別代表比例、積分以及微分系數;Ti、Td代表積分時間常數和微分時間常數。
將上述公式(4)進行離散化處理,得到:

3T1R并聯機器人運動的準確性與PID計算結果有著直接關系,而影響PID計算結果的關鍵在于比例、積分、微分三個參數整定[5]。一個3T1R并聯機器人完成一次作業任務,需要其機械手/臂的運動參數不斷進行改變,才能使其具有靈活性。但是傳統PID推算結果只適用于一種動作的控制,要想計算其他動作,就需要重新進行推算,效率較慢,且精度也不能保證,因此需要對PID的三個參數進行整定,調高其靈活性和適用性。
PID整定方法有很多,如蟻群算法、模擬退火算法、遺傳算法等。這些方法各有優缺點,如表1所示。
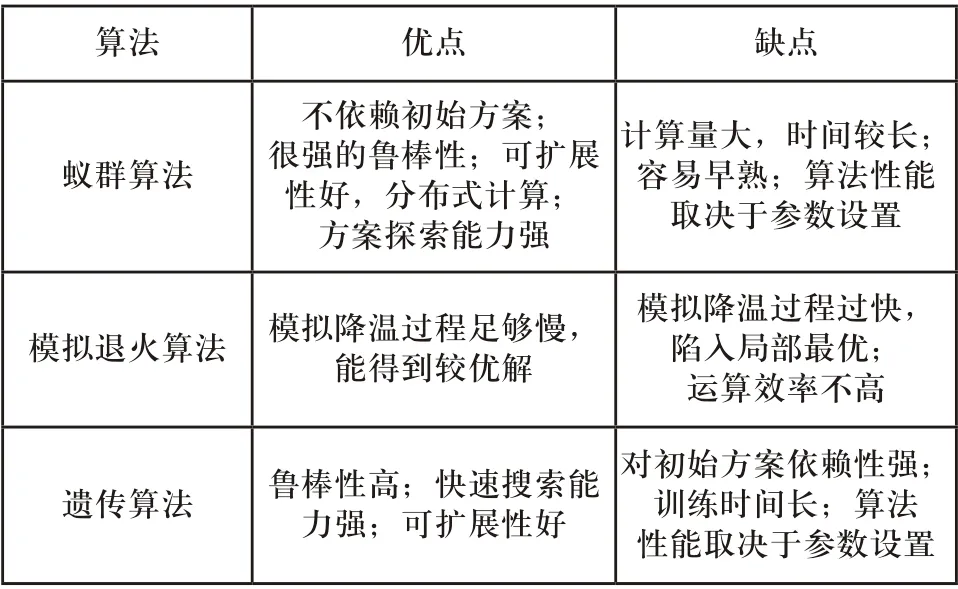
表1 PID參數整定方法優缺點
以上述遺傳算法為基礎,利用細菌共軛算子進行優化,然后利用優化后的算法對PID三個參數進行整定,具體過程如圖1所示。
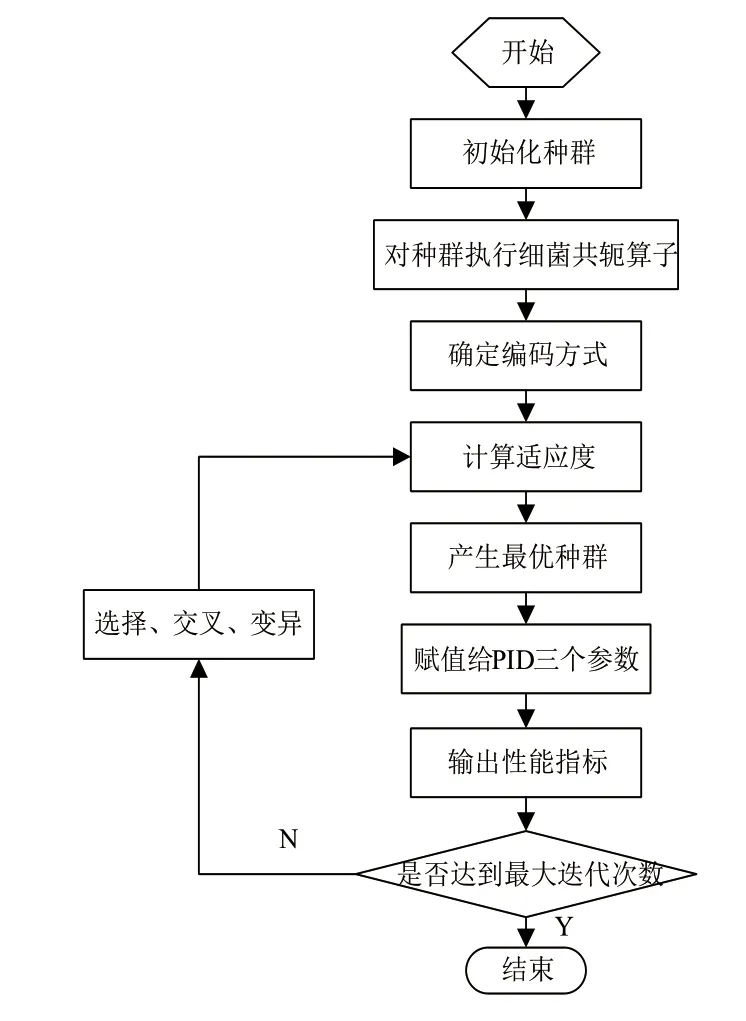
圖1 PID參數整定流程
2 測試與分析
為測試所研究分析方法在3T1R并聯機器人運動參數計算中的應用效果,以MATLAB軟件為平臺,進行測試。
2.1 設備選擇
本測試中,將所選擇的3T1R并聯機器人用于分揀作業當中。通過分揀作業的完成效果來檢驗其運動參數分析質量。所選擇的3T1R并聯機器人本身工作參數如下:
1)機械臂自由度:3自由度+夾持器;
2)有效負載:200g(伸直可夾重量);
3)負載:500g(夾持搬運重量);
4)臂展:350mm;
5)有效抓取范圍:半徑≤30cm;以中心軸為半圓的區域;
6)抓取物體直徑:1cm~6cm;
與之相連的為線性驅動器,本測試中所選擇的線性驅動器的關鍵參數如下:
1)絲杠導程mm:5;
2)電機功率w:400;
3)電機額定轉速rpm:3000;
4)減速比額定出力kN:1;
5)額定速度mm/s:250;
6)額定行程mm:300。
2.2 傳感器采集線性驅動器運行參量
利用位移傳感器、速度傳感器以及電流互感器采集所選擇線性驅動器運行參量,采集過程如圖2所示。
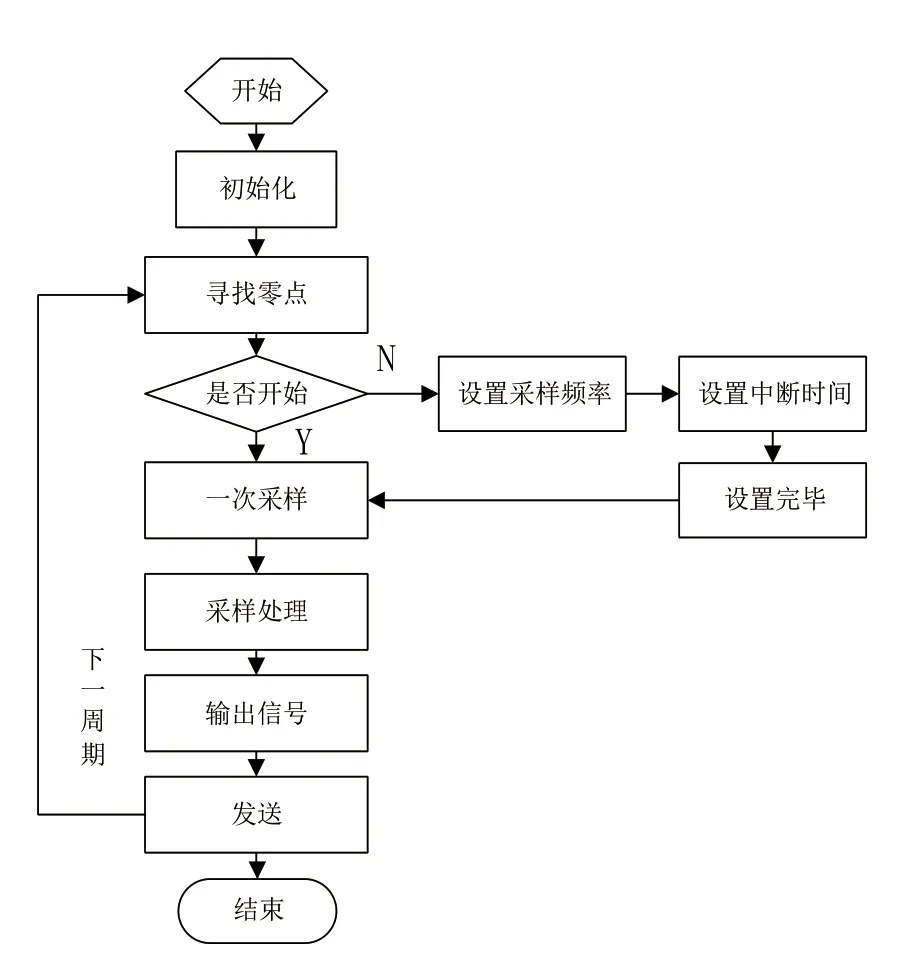
圖2 感器采集線性驅動器運行參量程序
2.3 3T1R并聯機器人運行模型
利用MATLAB中的Simulink,按照章節1.2,建立3T1R并聯機器人運行,如圖3所示。
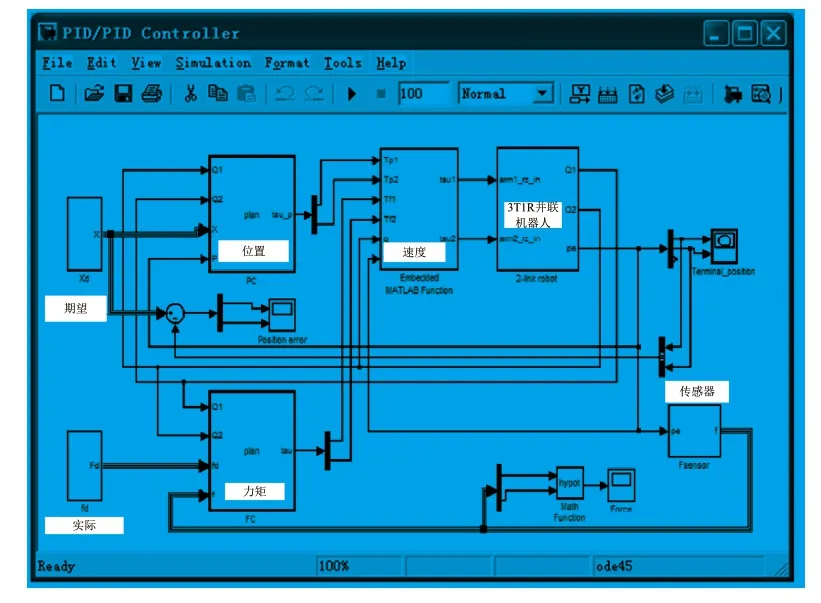
圖3 3T1R并聯機器人運行模型
2.4 作業現場搭建
以直徑為4mm的小型藥片為分揀對象,結合3T1R并聯機器人搭建作業現場,如圖4所示[6]。
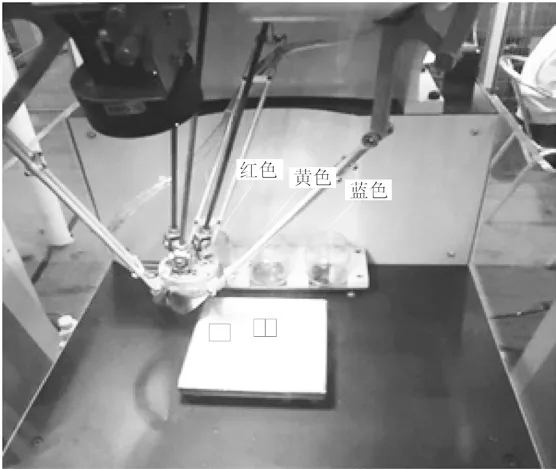
圖4 3T1R并聯機器人作業現場
2.5 運動軌跡設定
利用3T1R并聯機器人將小型藥片分揀到不同類別的儲存罐當中,分揀理想運動軌跡如圖5所示。
在圖5中理想運動軌跡每個階段選擇一個時間點,其對應當中3T1R并聯機器人的理想運動參數如下:

圖5 3T1R并聯機器人分揀理想運動軌跡
抓取段:位置(0.52,1.32,0.44);速度:1.25cm/s;力:4.68N:
升起段:位置(1.72,1.21,1.34);速度:1.22cm/s;力:5.63N:
平移段:位置(1.57,1.02,1.41);速度:2.14cm/s;力:6.32N:
下降段:位置(0.51,0.32,0.32);速度:1.15cm/s;力:3.32N:
放置段:位置(0.56,0.03,0.25);速度:1.00cm/s;力:0.02N:
2.6 算法參數設置
遺傳算法整定PID參數時,算法運行初始參數如下:
1)群體大小:30;
2)遺傳算法的終止進化代數:200;
3)選擇概率:0.25;
4)交叉概率:0.50;
5)變異概率:0.0025;
6)PID控制三個參數的尋優范圍:[0,100]。
2.7 效果分析統計與分析
相同測試條件下,應用基于模糊理論的分析方法和基于PID的分析方法,以此進行分揀作業,然后同樣一個時間點,統計3T1R并聯機器人運動參數,得出實際運動參數,并與理想運動參數進行對比[7]。結果如表2所示。
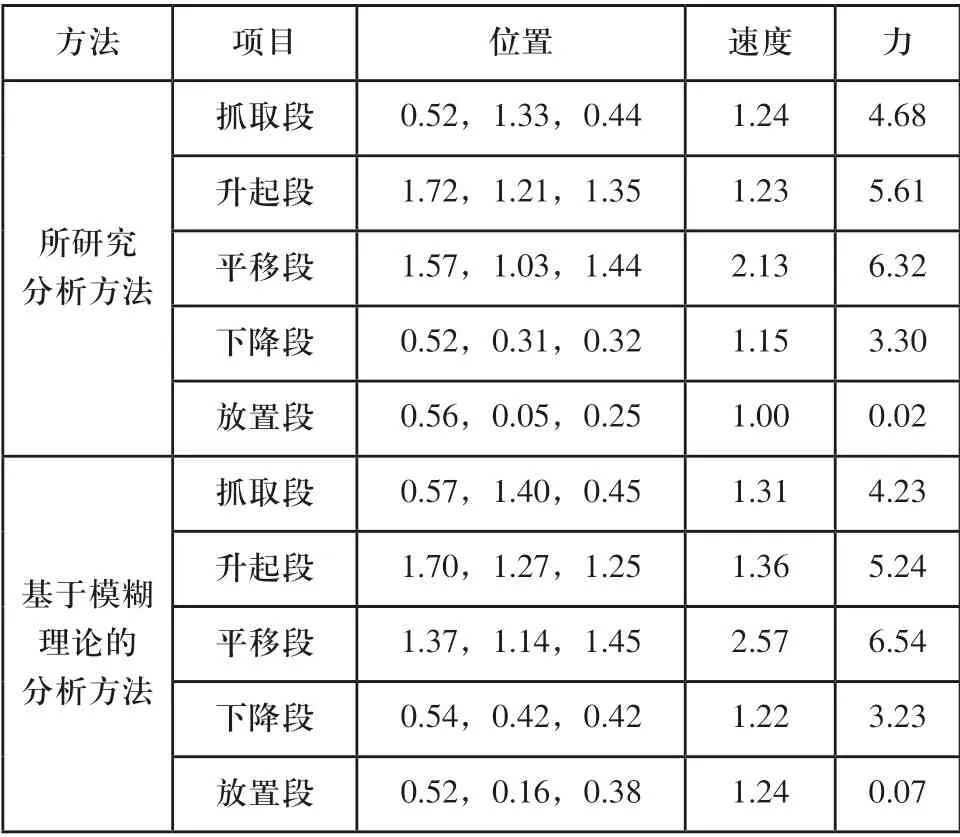
表2 3T1R并聯機器人實際運動參數
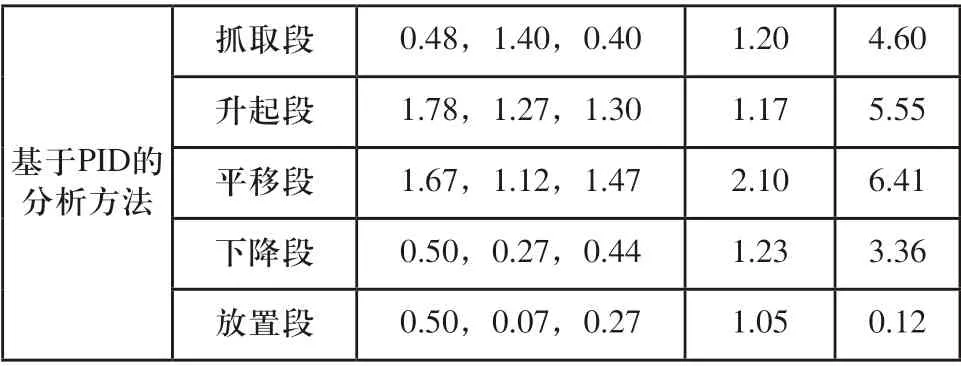
表2 (續)
將表2中的實際運動參數與2.5章節中3T1R并聯機器人的理想運動參數進行對比,從中可以看出:以其他兩種方法相比,所研究方法應用下,理想運動參數與實際運動參數更為相近,說明所研究方法分析質量更高,得出的運動參數精度更高[8]。
3 結語
綜上所述,為提高生產效率和質量,降低其生產過程中的風險,并聯機器人常被應用到現代化生產當中。然而,隨著作業對象的更精細化,對其運動參數精度要求更高。為此,進行基于線驅動原理的3T1R并聯機器人運動參數分析。最后通過實際應用,測試分析方法的精確度,得出理想運動參數與實際運動參數更為相近,證明了方法的有效性。然而,本研究,僅在理想的環境中進行測試,與實際應用情況存在一定的差別,因此有待進一步分析和探討。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
