分布式垂直軸風力發電機的并網特性分析
2021-08-25 08:43:08李爭董皓曹欣張文達于絮澤孫鶴旭
電氣傳動 2021年16期
李爭,董皓,曹欣,張文達,于絮澤,孫鶴旭
(1.河北科技大學 電氣工程學院,河北 石家莊 050018;2.河北建投新能源有限公司,河北 石家莊 050051)
風能已成為全球可再生能源研究的重點,許多國家將風能作為其與環境有關的長期計劃的基礎[1-2]。風能利用效率的高低主要取決于風力渦輪機的類型。風力渦輪機有兩種類型:水平軸以及垂直軸風力渦輪機。經過數十年的垂直軸風力渦輪機研究,發電技術被認為是成熟的,已廣泛應用于大型發電廠。近年來,隨著技術的進步以及風力發電的廣泛普及,垂直軸風力渦輪機受到的重視程度日益增加,已成為許多學者的研究對象。垂直軸風力渦輪機由于其自身的優勢,在補充能源、能源行業的結構調整以及在低風速地區捕獲風能方面發揮著重要作用[3]。隨著計算流體動力學的發展日益成熟,已經證明垂直軸風力渦輪機在流體動力學方面,有非常優異的性能,并且在風能利用率以及造價成本上,相比于其他風力機都有獨特的適應性,研究探討垂直軸風機的性能以及應用技術顯得尤為必要。隨著研究的不斷深入,發現這種風機類型是最有前景的中小型風機[4-5]。但是關于垂直軸風機并網的研究還較為鮮見。綜上,本文對一種新型鸚鵡螺等角螺線型垂直軸風力機進行了研究,對該類垂直軸風機并網的可行性做出驗證,并進行了仿真研究,通過仿真實驗數據分析風機在并網發電中的運行情況。
目前,大多數研究人員分析垂直軸風力機的空氣動力性能的方法為數值模擬方法。文獻[6]分析研究了垂直軸風力機的特性,并將其特性與水平軸風力機的特性進行了比較,強調了兩種風力機各自的優缺點。在文獻[7]中,提出了一種新型的雙轉子風力渦輪機,并通過數值模擬分析了空氣邊界層對風力渦輪機氣動性能的影響。基于升力線模擬方法,完成了MW級風力發電機的設計,并在設計過程中考慮了空氣動力學因素。研究了不同垂直軸風力發電機對空氣動力性能的影響[8]。文獻[6-8]通過數值模擬方法對風力渦輪機的空氣動力性能進行了深入分析,但是這些分析僅完成了風力機性能參數的基本研究,未能給出提高其性能的方案。綜上所述,采用數值模擬作為本文的主要分析方法。
隨著風力發電普及性的提高,對于風電機組容量的提升需求也更為迫切,采用增速齒輪箱的雙饋變速風電機組的成本上升,且故障率較高,在對于風力發電機組可靠性要求提升的情況下,垂直軸風機更為受到重視,文獻[9]在PSS/E中建立了轉速為恒定的風電機組,根據永磁同步電機的風電機組動態模型,文獻[10]分析了雙PWM永磁同步風電機組對于機側變流器的控制方案,并且對于發電機側端電壓的控制提出了增加約束方程的方案,文獻[11]介紹了風力發電并網的要求及其控制原理,文獻[12]介紹了可變步長的最大功率跟蹤算法。
本文在已有技術基礎上,采用有限元仿真軟件,構建了3D風力發電機模型。分析了諸如風能利用率和轉矩等基本參數,然后建立發電機的數學模型,并分析其發電特性,驗證了鸚鵡螺等距螺旋風力發電機在發電系統中的有效性和可行性。
1 風力機模型設計
1.1 風機基本參數的分析
根據牛頓第二定律,設F為力,m為質量,a為加速度,可得出結論力等于質量與加速度的乘積:

得出動能為

上述等式均在質量m為恒定值時有效,但由于風的質量是每時每刻都會發生變化的量,在不同時刻具有不同的速度。因此風的動力方程為
又因為

最終得到的公式為

式中:vw為進入風速和出口風速的平均值;ρ為空氣密度;A為風力機每個葉片實際掃風面積。
用平均風速vw代替公式(2)中的v,即可得在風力機的轉子葉片中的機械動力為

式中:vu為轉子葉片入口處上游風速;vd為轉子葉片出口處的下游風速。
但質量流率為

因此式(6)可以表述為

其中

式中:Cp為功率系數。
式(9)為轉子葉片在風中提取的機械動力的簡化方程。
葉尖速比可以用vu和vd表示:

式中:R為風葉半徑;ω為風葉旋轉角速度。
轉矩系數Ct的公式為

式中:D為風輪半徑。
1.2 風機的基本結構
鸚鵡螺等距螺旋風力發電機由鸚鵡螺等距螺旋風力發電機、聯軸器、增速箱、發電機、軸承、鋼制支架、垂直軸、控制器、軸承座、電池、逆變器裝置等組成。風輪由輪轂和鸚鵡螺等距螺旋葉片組成,圖1a為鸚鵡螺等角螺旋風力機整體模型圖。葉片的徑向截面為橢圓形或對稱翼型或對稱等距螺旋形,圖1b為葉片模型圖。當葉片背向風時,其徑向截面為橢圓形,此時,正好有一個橢圓形的葉片或對稱的機翼或對稱的等距螺旋,因此阻力系數很小。側面正好面對風,阻力系數非常大,因此推力很高。同時,下風葉片延伸到上風葉片內部的部分也起著加速引導的作用。將來,當風被吸入迎風葉片的外部時,它將推動風輪以較小的力旋轉。另一個特點是葉片是鸚鵡螺等角度螺旋形,旋轉時的摩擦阻力很小,因此風輪轉速很高。

圖1 新型鸚鵡螺等角螺線型垂直軸風力機結構Fig.1 Novel nautilus isometric helical vertical axis wind turbine structure
1.3 邊界條件及其求解設定
為了模擬風力渦輪機在實際工作中的運行,ANSYS Workbench中的Fluent(CFX)模塊用于流場分析[12],該模塊主要檢查葉片的流固耦合以及風力渦輪機3D模型的空氣動力學發展。發電機集成在驅動軸中。
圖2為使用ANSYS CFX軟件模擬的風力渦輪機流場的示意圖。如圖2所示,流場由兩部分組成:固定區域和旋轉區域。固定域是風力渦輪機所在的外部環境,旋轉域是風力渦輪機葉片在其中工作的工作環境。為了模擬風力渦輪機真實環境,固定域的面積應比風力渦輪機的尺寸大得多,而旋轉域的面積應比葉片旋轉的面積略大。

圖2 風力渦輪機的靜態域和旋轉域Fig.2 Thestatic domain and rotating domain of the wind turbines
創建模型和流場后,需要進行網格劃分,圖3為網格劃分示意圖。

圖3 網格劃分示意圖Fig.3 Schematic diagram of meshing
在劃分過程中,選擇的網格類型,網格布局和算法直接影響數值模擬結果的準確性[13]。本文使用自動網格劃分方法,即經典劃分方法。對于某些不規則模型,該劃分方法通常能夠滿足計算要求。整個都是四面體網格,可以輕松地適應復雜的幾何形狀,該網格在模型的不規則點處相對密集,從而提高了計算精度。
在網格劃分完成的基礎上,ANSYS CFX軟件求解器的設定也對最終結果的準確性有較大影響。在使用ANSYS CFX軟件進行計算的過程中,主要使用的計算方程為雷諾平均N-S方程和可連續壓縮方程。
圖4為流體邊界設置圖。

圖4 流體域邊界設置Fig.4 Fluid domain boundary setting
從圖4中看出,流場主要分為旋轉域以及靜態域。靜態域包括流動的氣流以及風力機的支撐桿,模擬氣流流入的方向和速度,考慮到后續的實驗在內蒙古地區完成,設定入口為速度入口,風速設定1~10 m/s,中度湍流,出口為壓力出口,壓力設定0,靜止域頂部和底部設置為墻,左右兩側設置為對稱。旋轉域包括風力機葉片、旋轉軸以及風力機內部氣流,模擬風力機葉片旋轉的速度和方向,根據不同的葉尖速比(0.1~1),設定旋轉場轉動的角速度。為保證計算精度及計算的快速收斂,選用壓力關聯方程的半隱式方法(SIMPLE),該方法考慮了高階解和逆風模式的共同作用,因此適用性好。具體模擬參數如下:雷諾數為6.0E+5,迭代步長為300,湍流模型為標準k-e模型,網格為100萬,剩余指標為1.0E–4。除此之外,步長的選擇十分關鍵,步長過長,計算時間延長,消耗大量時間;步長過短,會導致計算結果未收斂。經過大量計算驗證,本文所用模型在步長達到300步時,達到計算精度。
2 分布模型聯合仿真
采用ANSYS和Matlab仿真,ANSYS用來計算風輪轉矩,得出的數據送入Matlab中進行仿真。具體步驟為:分別在Fluent和Simulink環境下建立各自的仿真模型,使用Fluent可得出發電機輸出轉矩,風輪轉速,將得到的數據傳遞到Matlab仿真模型中,得到最終的并網數據。圖5為風機模型在不同環境下仿真所得出的數據傳遞流程圖。
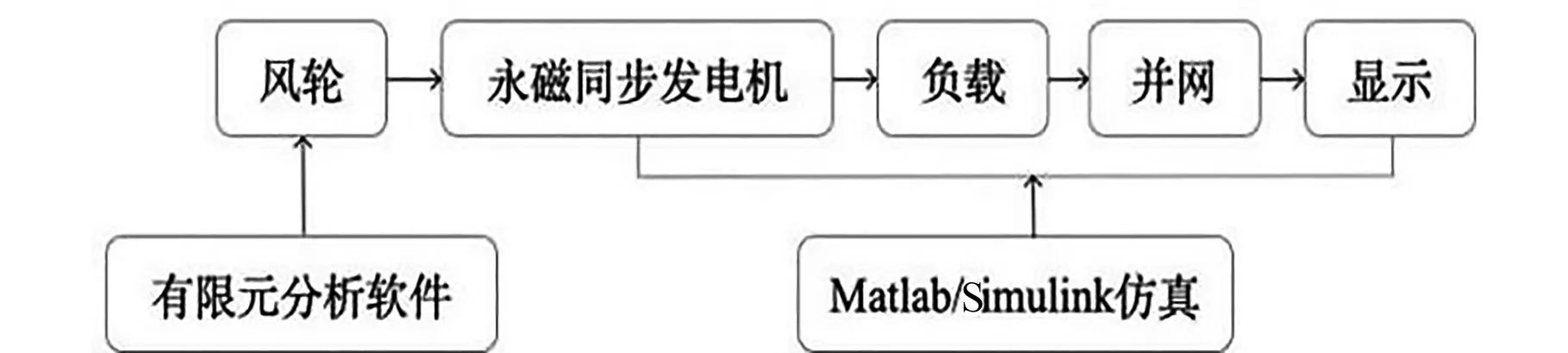
圖5 仿真流程圖Fig.5 Simulation flowchart
2.1 風力發電機模型
發電機轉子的動態方程為[14-16]

式中:T為風力機輸出轉矩;T0為阻力轉矩;J為風力機轉動慣量。
永磁同步發電機模型中,設定d,q軸方向:設定在永磁體轉子中心線上為d軸,則其沿轉子旋轉方向超前90°為q軸,可得出d,q軸的數學模型。
電壓方程為

式中:Rs為定子繞組每相電阻;usd,usq分別為電機端電壓d,q軸分量;Ψsd,Ψsq分別為定子磁鏈d,q軸分量;isd,isq分別為定子電流d,q軸分量;ωe為電角速度。
電磁鏈轉矩方程為

式中:p為發電機轉子極對數。
2.2 系統結構
根據同步風力發電機組的并網原理、空氣動力學原理、機側變流器及網側變流器控制原理搭建仿真模型結構,得到發電系統仿真模型如圖6所示。

圖6 發電系統仿真模型Fig.6 Power system simulation model
由ANSYS得到的風速等數據傳遞到Matlab模型中,將發電機輸出的轉速,電流及相位角送入變流器中,經過整流電路得到高壓直流輸出,又經整流電路降壓還原為三相交流電進行并網,電網的電流、電壓以及高壓直流電送入網側變流器。
2.3 控制策略
由于風速的不確定性以及不穩定性,在風力機中加入改變步長算法MPPT,隨著風速的突變,MPPT算法的步長也隨之發生改變,使風能利用率得到了提高。
發電機側變流器的內部結構如圖7所示。

圖7 機側變流器內部結構Fig.7 Internal structure of generator-side converter
控制方法為:使PMSG送入變流器的有功功率按照最大功率曲線變化,可以最大限度的使能量得到利用,機側變流器內部可以分為兩個部分,內環控制器和外環控制器。

在可變步長的MPPT算法中,令R(k)為第k個尋優周期,根據尋優周期的不同狀態可分為四種模式:當R(k)>0且R(k-1)>0時,系統功率處于上升階段,則算法的步長應處于增加狀態,以提高功率跟蹤的速率;當R(k)<0且R(k-1)<0時,此時功率處于下降階段,算法的步長處于減小狀態;當R(k)<0且R(k-1)>0時,系統功率達到了頂峰并且開始下降,此時需要對步長進行指數衰減,使步長快速達到最大功率點的數值;當R(k)>0且R(k-1)<0時,需要衰減步長。令:

式中:Δiqs為算法中被擾動的步長數值;C為步長衰減系數[17],取C=0.382。
當系統尋優周期處于R(k)R(k-1)<0時,衰減步長皆為0.382Δiqs,當步長衰減n次后,則有:

由式(17)可得,系統最終步長會收斂于0,在最大功率點附近處于微小震蕩的狀態,很大程度增長了系統的精確度。
電網側變流器采用定子電壓矢量控制方案,使電網側變流器與電網之間實現了解耦控制,傳輸的有功功率與無功功率實現解耦,使電網電壓位于d軸,即Ugq=0,實現解耦后電網輸出的有功功率Pg和無功功率Qg為

由式(18)可得,采用矢量控制后,無功功率和有功功率都變成了可單獨進行控制的量。由此設計出的網側變流器的內部結構如圖8所示。

圖8 網側變流器內部結構Fig.8 Internal structure of grid-side converter
由圖8可知,網側變流器的主要構成為電壓外環和電流內環,電壓外環控制高壓直流電,使用U*dc與Udc處理后經過PI控制進行調節計算,可得到d軸的電壓分量。
設置q軸的電流分量的結果值為0,使期望的目標值與q軸電流分量相減得到誤差信號,對誤差信號進行PI控制進行調節計算,得到的結果為q軸的電壓分量。得到的信號送入PWM模塊,作為網側變流器的驅動信號。
3 仿真結果分析
3.1 流場分析
圖9為網格無關性驗證曲線,其存在意義為在保證計算結果準確性的情況下,通過圖像選擇合適的網格數以達到節省計算時間,并且找到最佳網格劃分數的目的。如圖9可知,在網格數達到100萬之后,網格數量對風力機轉矩不再產生較大影響,因此選擇網格數為100萬作為后續計算基礎,進行后續的性能分析。
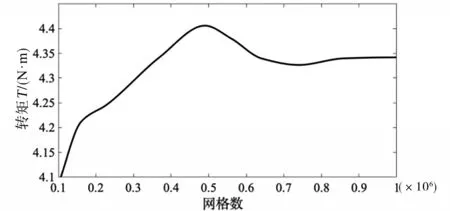
圖9 網絡獨立性驗證曲線Fig.9 Network independence verification curve
圖10為葉尖速比—風能利用率曲線,圖10中設定的葉尖速比的范圍是0.1~0.7。風能利用系數隨著葉尖速比的變化呈現的變化規律為先增大后減小,當葉尖速比TSR=0.4時,風能利用系數Cp達到最大值,此時的風能利用率為最高。可以達到最大程度地利用風能的目標,可以通過將風機速度穩定在一定數值內來實現。
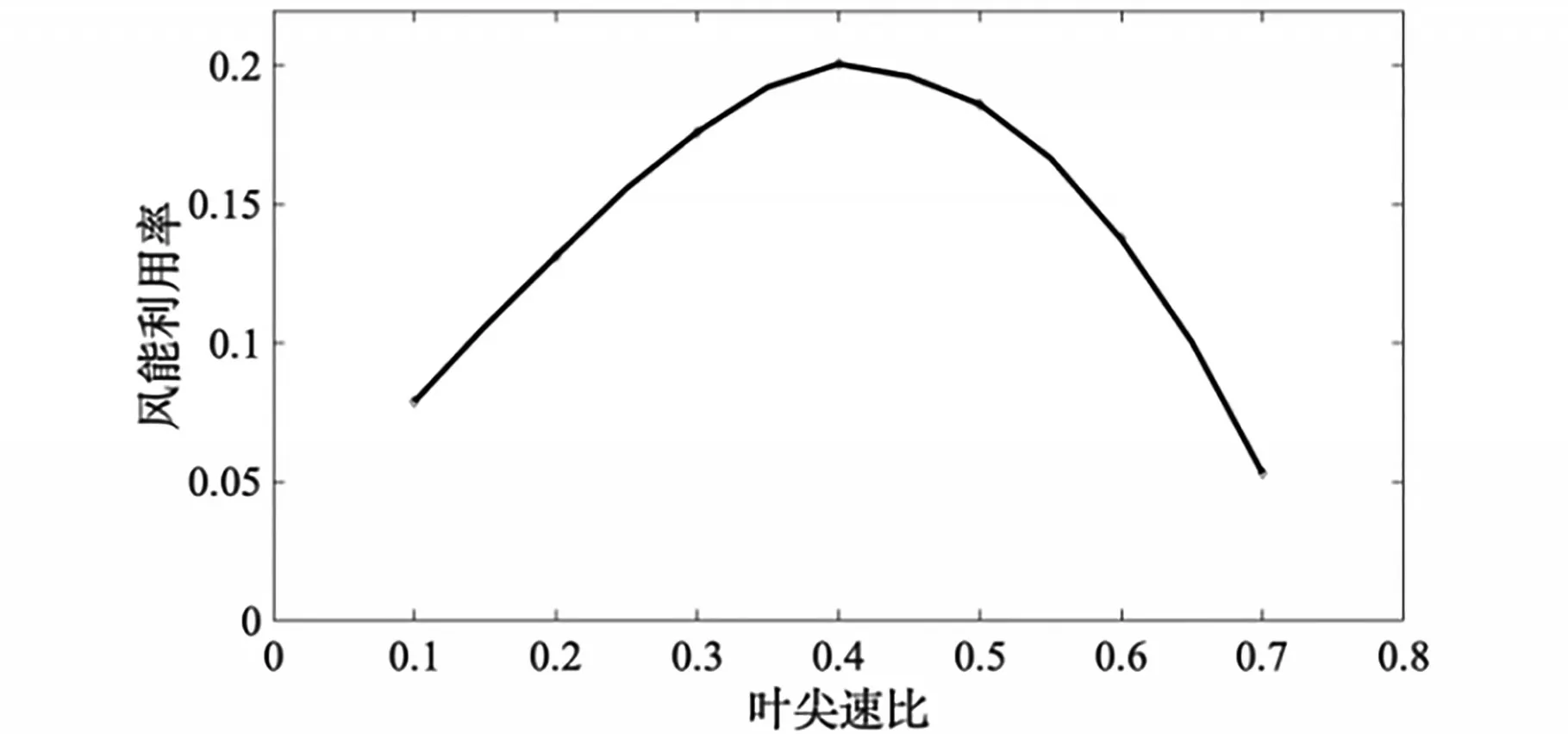
圖10 葉尖速比—風能利用曲線Fig.10 Tip speed ratio—wind energy utilization curve
圖11為一個旋轉周期中風力渦輪機的三個葉片的轉矩系數。TSR設置為0.23,風速為9 m/s。

圖11 三個葉片的轉矩比較Fig.11 Torque comparison of three blades
從圖11可以看出,圖中的分散點是實際數據,通過仿真計算得出。根據散點圖繪制的調整曲線大致為三個正弦曲線。由此可以得出結論,三個葉片始終存在一個葉片具有最大的作用,風力渦輪機的總輸出轉矩基本上穩定,并且轉矩在4.5 N·m和5 N·m之間波動。
3.2 發電功率分析
仿真模型的輸入風速設定為0~0.8 s內為6 m/s,0.8~1.5 s內為10 m/s,1.5~2.0 s內為8 m/s,設定風速如圖12所示。仿真時長為2.5 s。發電機的定子相電阻為0.005 Ω,電樞電感為0.002 H,直流電壓參考量為800 V,風機額定容量為25 kW,額定電網容量為20 kW。

圖12 設定風速Fig.12 Set wind speed
發電機輸出轉矩波形如圖13所示。MPPT算法仿真對比如圖14所示。由圖13可知,風機輸出轉矩維持在1 000 N·m,在風速發生較大波動時,發電機轉矩會出現暫時波動,并且在短時間內恢復至1 000 N·m,證明本文所用控制策略的有效性。

圖13 發電機輸出轉矩Fig.13 Generator output torque

圖14 MPPT算法仿真對比Fig.14 MPPT algorithm simulation comparison
由圖14可知,在仿真中帶有風速突變的情況下,本文所用功率跟蹤算法較傳統算法來看,顯示出了準確度更高的性能,并且算法步長最終收斂于0,也驗證了文中的公式計算結果。
圖15為發電機輸出三相電流波形。由圖15可知,發電機所輸出的三相電流為平滑的三相電,在風速發生突變的時間出現短暫波動,隨后恢復50 A的交流電。圖16為直流母線電壓,從圖16中可以看出大體維持在800 V左右,在風速波動后也很快恢復了正常電壓,計算結果較為理想。

圖15 發電機輸出三相電流Fig.15 Generator output three-phase current

圖16 直流母線電壓Fig.16 DC bus voltage
圖17為電網輸出電壓波形。圖18為電網輸出功率波形。由圖17可得,在并網后電壓可以維持300 V交流電,曲線較為平滑,并且在風速發生突變時曲線也沒有發生較大波動,并且在圖18中,電網在額定風速下輸出功率在20 kW,符合預期的輸出功率,證明了機側/網側控制方案的有效性,以及鸚鵡螺等角螺線型垂直軸風機在電網中的可靠性與穩定性。

圖17 電網輸出波形Fig.17 Grid output voltage waveform

圖18 電網輸出功率Fig.18 Grid output power
4 結論
通過建立模型對鸚鵡螺等角螺線型垂直軸風機的性能以及并網參數進行了分析,分析結果符合預期。進行了流場分析,經過大量計算驗證,本文所用模型在設定步長達到300步時,達到計算精度。根據發電機模型,建立了用于發電以及并網的控制系統仿真模型,并且加入了改變步長的最大功率跟蹤法,經過仿真驗證,此算法在風能并網中可以發揮其優良性能,證明在大型發電并網系統中,該類風機同樣可以達到理想的效果和穩定性,證明了所建模型的有效性和鸚鵡螺等角螺線型垂直軸風機在發電系統中的可靠性及并網穩定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
大電機技術(2017年3期)2017-06-05 09:36:02
光學精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電網與清潔能源(2015年3期)2015-02-28 16:03:31