OBN資料二次定位質(zhì)量監(jiān)控方法
2021-08-18 07:04:18王忠成童思友周華偉方云峰孫鄖松徐秀剛
石油地球物理勘探 2021年4期
王忠成 童思友*② 周華偉③ 方云峰 孫鄖松 徐秀剛
(①中國(guó)海洋大學(xué)海底科學(xué)與探測(cè)技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,山東青島 266100;②青島海洋科學(xué)與技術(shù)試點(diǎn)國(guó)家實(shí)驗(yàn)室海洋礦產(chǎn)資源評(píng)價(jià)與探測(cè)技術(shù)功能實(shí)驗(yàn)室,山東青島 266061;③休斯頓大學(xué)地球與大氣科學(xué)系,得克薩斯休斯頓 77204;④東方地球物理公司物探技術(shù)研究中心,河北涿州 072751)
0 引言
隨著地震勘探逐漸發(fā)展,傳統(tǒng)的海面拖纜地震采集方式已不能滿(mǎn)足勘探需求。隨著技術(shù)的進(jìn)步,逐步提出了海底地震儀(Ocean Bottom Seismograph,OBS)、海底電纜(Ocean Bottom Cable,OBC)、海底節(jié)點(diǎn)(Ocean Bottom Node,OBN)等地震采集方式[1-5]。這些新技術(shù)的出現(xiàn)為海洋油氣勘探帶來(lái)了革命性的變化:地震勘探的深度可達(dá)莫霍面;由于接收器位于海底,地震資料的信噪比更高,能夠獲得高質(zhì)量的多分量地震數(shù)據(jù);采集方位角更寬,照明度更高等。
但是,對(duì)于海面激發(fā)、海底接收的OBN地震采集方式,接收設(shè)備需要部署在海底,由于復(fù)雜海洋環(huán)境的影響,檢波點(diǎn)的位置可能發(fā)生偏離,需要使用一定的技術(shù)手段確定檢波點(diǎn)的準(zhǔn)確坐標(biāo),這一過(guò)程通常叫做二次定位[6-7]。為了解決二次定位的問(wèn)題,發(fā)展了聲波二次定位[8]和初至波二次定位[9]方法。前者利用專(zhuān)門(mén)的硬件,通過(guò)聲波旅行時(shí)確定檢波點(diǎn)位置;后者利用地震記錄中的初至波旅行時(shí)進(jìn)行二次定位。聲波二次定位具有較高的精度,但是費(fèi)用較高,因此初至波二次定位是目前應(yīng)用較廣的二次定位方法。
關(guān)于地震初至波二次定位,前人已經(jīng)提出了多種方法,如正四面體法[10]、搜索法[11]、擬合曲面法[12]、混合定位法[13]、矢量合成法[14]、等效速度法[15-16]等。但大多數(shù)研究重點(diǎn)強(qiáng)調(diào)了各種方法的原理和實(shí)現(xiàn)過(guò)程,在實(shí)際資料的應(yīng)用過(guò)程中如何進(jìn)行質(zhì)量監(jiān)控以取得好的應(yīng)用效果,卻鮮有系統(tǒng)性研究[17-18]。等效速度法是最新提出的二次定位方法,它不僅能夠進(jìn)行三維海底檢波點(diǎn)的定位,而且因考慮了地震波在海水中傳播速度的影響,具有更高的定位精度。基于此,本文在等效速度法的基礎(chǔ)上,研究了影響海底檢波點(diǎn)二次定位質(zhì)量的控制因素,如初至波旅行時(shí)拾取精度、觀測(cè)系統(tǒng)、旅行時(shí)系統(tǒng)誤差等。結(jié)果表明:直達(dá)波旅行時(shí)拾取精度對(duì)二次定位的精度具有至關(guān)重要的影響;把炮點(diǎn)和檢波點(diǎn)分別投影到x軸、y軸和z軸,炮點(diǎn)相對(duì)于檢波點(diǎn)的分布越均勻?qū)ΨQ(chēng),則該方向定位精度就越高;較難發(fā)現(xiàn)旅行時(shí)系統(tǒng)性誤差,但對(duì)z方向定位精度有較大影響。最終給出了做好OBN二次定位質(zhì)量監(jiān)控的方法與建議:首先,對(duì)初至旅行時(shí)進(jìn)行篩選,保證用于二次定位的初至旅行時(shí)拾取質(zhì)量;然后在計(jì)算過(guò)程中添加系統(tǒng)時(shí)移量這一未知數(shù),用于計(jì)算可能存在的初至旅行時(shí)的系統(tǒng)時(shí)移,并盡可能選擇相對(duì)于檢波點(diǎn)均勻?qū)ΨQ(chēng)的炮點(diǎn)的初至?xí)r間參與計(jì)算;最后,通過(guò)對(duì)比二次定位前、后共檢波點(diǎn)道集直達(dá)波雙曲動(dòng)校正后形態(tài)以及旅行時(shí)誤差的空間分布、數(shù)理統(tǒng)計(jì)等,可以對(duì)二次定位質(zhì)量進(jìn)行監(jiān)控。
1 二次定位影響因素分析
1.1 初至旅行時(shí)對(duì)二次定位精度的影響
初至波旅行時(shí)是進(jìn)行檢波點(diǎn)二次定位的基礎(chǔ),因此在進(jìn)行二次定位之前,需要先進(jìn)行初至拾取。無(wú)論是人工拾取還是軟件自動(dòng)拾取,總會(huì)存在拾取不準(zhǔn)的可能。典型的情況有:①初至拾取存在跳點(diǎn),導(dǎo)致個(gè)別地震道拾取的初至旅行時(shí)與真實(shí)值相差較大;②在地震記錄信噪比較低的區(qū)域,初至拾取質(zhì)量較差。針對(duì)這兩種情況,需要把相應(yīng)的初至信息舍棄,消除其對(duì)二次定位結(jié)果的不利影響。
圖1為初至篩選前、后的旅行時(shí)曲線。對(duì)于檢波點(diǎn)位于海底、炮點(diǎn)位于海面的觀測(cè)系統(tǒng),理想情況下,如果初至旅行時(shí)拾取準(zhǔn)確且檢波點(diǎn)坐標(biāo)準(zhǔn)確,初至?xí)r間隨偏移距變化曲線應(yīng)該是雙曲線[19]。如果僅僅是檢波點(diǎn)坐標(biāo)不準(zhǔn),而初至拾取準(zhǔn)確,則初至旅行時(shí)曲線大體形狀仍是雙曲線,只是稍有波動(dòng),這是檢波點(diǎn)坐標(biāo)不準(zhǔn)導(dǎo)致偏移距不準(zhǔn)造成的,且在整個(gè)偏移距范圍內(nèi)這種波動(dòng)的幅度應(yīng)該一致。圖1a中紅色圓圈內(nèi)初至拾取效果不好,與實(shí)際情況有較大差異,應(yīng)予以剔除。剔除的原則有兩種:①根據(jù)道頭中的炮點(diǎn)和檢波點(diǎn)坐標(biāo)計(jì)算該道的直達(dá)波理論旅行時(shí),并計(jì)算與實(shí)際拾取旅行時(shí)的差,如果誤差絕對(duì)值小于一定數(shù)值,如100ms(可根據(jù)區(qū)域內(nèi)檢波點(diǎn)坐標(biāo)誤差調(diào)整,以免把正常初至信息剔除),則予以保留,如果誤差絕對(duì)值超過(guò)該值,則予以剔除,這樣可以去掉初至拾取中的個(gè)別跳點(diǎn)、0值、負(fù)值、99999等異常值,從而減小對(duì)定位精度的不利影響。②對(duì)于超過(guò)一定偏移距的初至進(jìn)行剔除,比如超過(guò)3000m或3倍水深的初至信息,這樣可以刪除遠(yuǎn)偏移距低信噪比以及部分折射波初至信息。

圖1 篩選前(a)、后(b)初至曲線
表1為初至旅行時(shí)篩選前、后定位結(jié)果的對(duì)比,該數(shù)據(jù)檢波點(diǎn)初始坐標(biāo)三個(gè)方向上都有一定的誤差。直接用拾取的初至?xí)r間進(jìn)行二次定位計(jì)算,得到的檢波點(diǎn)坐標(biāo)誤差大,可見(jiàn)初至旅行時(shí)的準(zhǔn)確性對(duì)定位精度至關(guān)重要。依據(jù)上述兩個(gè)原則,把初至拾取誤差較大的部分刪除,重新進(jìn)行二次定位計(jì)算,定位誤差在2m以?xún)?nèi),精度大大提高。

表1 初至旅行時(shí)篩選前、后定位結(jié)果對(duì)比
由此可見(jiàn),在初至拾取后需要進(jìn)行異常點(diǎn)的甄別與刪除,以確保定位精度。
1.2 炮點(diǎn)與檢波點(diǎn)空間分布關(guān)系對(duì)OBN檢波點(diǎn)二次定位精度的影響
除了初至旅行時(shí)的準(zhǔn)確性會(huì)對(duì)OBN檢波點(diǎn)定位精度帶來(lái)明顯影響外,觀測(cè)系統(tǒng)即炮點(diǎn)相對(duì)于檢波點(diǎn)的分布關(guān)系也會(huì)對(duì)定位結(jié)果產(chǎn)生一定的影響。觀測(cè)系統(tǒng)對(duì)定位結(jié)果的影響主要體現(xiàn)在抗旅行時(shí)誤差的能力方面。對(duì)于一個(gè)檢波點(diǎn),觀測(cè)角度越均勻、越對(duì)稱(chēng),則抗旅行時(shí)誤差的能力越強(qiáng)。
從地震數(shù)據(jù)中拾取的初至?xí)r間,總會(huì)或大或小存在一定噪聲,這種噪聲是指旅行時(shí)拾取的誤差。旅行時(shí)誤差產(chǎn)生的原因通常有:①地震數(shù)據(jù)存在一定的噪聲,從而導(dǎo)致初至位置不明確,實(shí)際拾取的位置與真實(shí)位置存在一定偏差;②地震數(shù)據(jù)通常為離散數(shù)據(jù),最終拾取旅行時(shí)的精度必定受到采樣間隔的限制。
為闡述炮檢點(diǎn)空間分布關(guān)系對(duì)二次定位精度的影響,建立如圖2a所示的觀測(cè)系統(tǒng),其中檢波點(diǎn)的真實(shí)坐標(biāo)為(23900.00m,10000.00m,1420.00m),在海面上4000m偏移距內(nèi)以50m間隔進(jìn)行放炮,聲波在海水中的傳播速度為1490m/s。用炮檢點(diǎn)真實(shí)坐標(biāo)以及聲波在海水中的傳播速度計(jì)算獲得每炮的直達(dá)波旅行時(shí),然后人為加入±8ms的隨機(jī)誤差,用圖2中4個(gè)觀測(cè)系統(tǒng)數(shù)據(jù)分別進(jìn)行二次定位,結(jié)果如表2所示。其中檢波點(diǎn)初始坐標(biāo)為(23923.90m,9990.70m,1406.00m),海水速度的初始值為1500m/s。
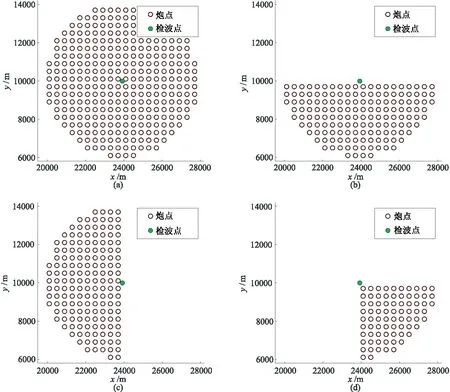
圖2 同一檢波點(diǎn)不同炮點(diǎn)觀測(cè)系統(tǒng)分布
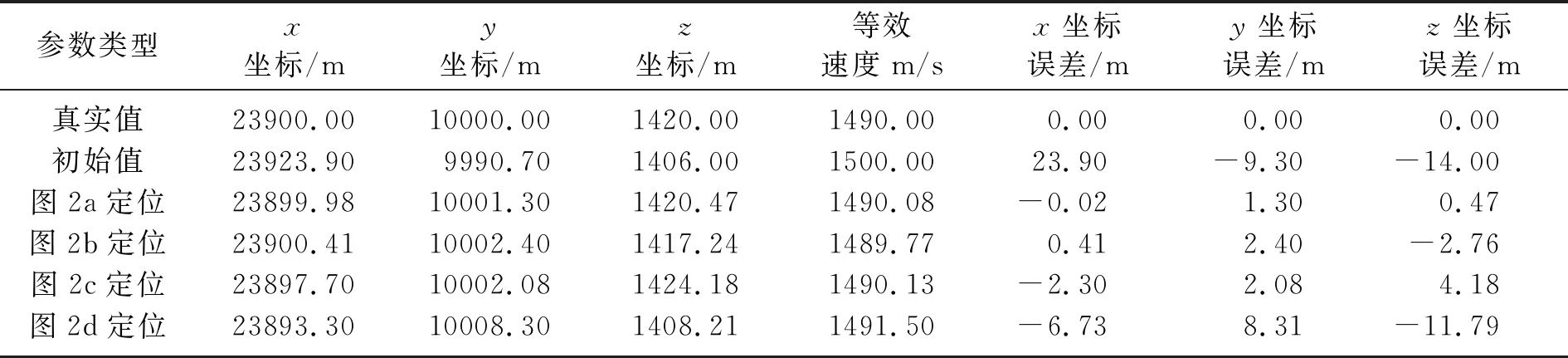
表2 不同觀測(cè)系統(tǒng)的定位精度對(duì)比
由表2可以看出,圖2a觀測(cè)系統(tǒng)的定位精度最高,圖2b觀測(cè)系統(tǒng)的y坐標(biāo)及圖2c觀測(cè)系統(tǒng)的x坐標(biāo)定位有較大誤差,圖2d觀測(cè)系統(tǒng)的x和y坐標(biāo)定位誤差都較大。可見(jiàn)觀測(cè)方位角不均勻會(huì)對(duì)定位精度產(chǎn)生較大影響。
為此,建議在實(shí)際資料OBN共接收點(diǎn)二次定位時(shí),選擇方位角均勻分布的炮點(diǎn)信息參與反演,可以確保定位精度。
1.3 旅行時(shí)系統(tǒng)誤差對(duì)二次定位精度的影響
通常地震初至波拾取的是第一個(gè)起跳點(diǎn)的峰值位置,以此作為地震初至波的旅行時(shí),這樣做有一個(gè)前提,那就是地震子波為零相位子波,而實(shí)際地震子波通常是混合相位的,這就導(dǎo)致實(shí)際拾取的初至?xí)r間和真實(shí)的初至?xí)r間有一定的時(shí)差。此外,由于儀器系統(tǒng)的原因,也可能導(dǎo)致開(kāi)始記錄時(shí)間不為0時(shí)刻。但總體來(lái)講,對(duì)于同一個(gè)工區(qū)同一套設(shè)備采集的地震數(shù)據(jù),這種系統(tǒng)性誤差是相對(duì)固定的。對(duì)于存在系統(tǒng)性誤差的初至?xí)r間,需要對(duì)行整體時(shí)移處理后才能進(jìn)行二次定位計(jì)算,否則將會(huì)影響二次定位的精度,尤其是深度方向的精度。圖3為OBN檢波點(diǎn)二次定位的試驗(yàn)數(shù)據(jù),雖然初至信噪比較高且拾取質(zhì)量較好,但實(shí)際拾取的初至(綠線)與根據(jù)炮點(diǎn)和檢波點(diǎn)實(shí)際坐標(biāo)計(jì)算的真實(shí)初至(紅線)存在一定的系統(tǒng)誤差。
圖3 實(shí)際拾取旅行時(shí)(綠線)與計(jì)算的旅行時(shí)(紅線)對(duì)比
旅行時(shí)系統(tǒng)誤差的存在較為隱蔽,一般不容易從初至拾取環(huán)節(jié)檢查出來(lái),且對(duì)z方向的定位影響遠(yuǎn)大于x和y方向,這是炮點(diǎn)相對(duì)于檢波點(diǎn),因?yàn)樵趚和y方向一定范圍內(nèi)都有分布,而在z方向只有海平面這一位置有觀測(cè)值,因此在z方向上定位的抗噪能力最弱。在進(jìn)行二次定位時(shí)可以用以下方法甄別是否存在整體時(shí)移問(wèn)題:首先刪除初至拾取存在明顯錯(cuò)誤的部分,即首先保證用于二次定位計(jì)算的初至質(zhì)量;然后在直達(dá)波范圍內(nèi)(一般和水深有關(guān))選用不同偏移距之內(nèi)的初至數(shù)據(jù)進(jìn)行二次定位計(jì)算,分析計(jì)算結(jié)果。理論上,如果初至旅行時(shí)拾取準(zhǔn)確且不存在整體時(shí)移,那么不同偏移距內(nèi)旅行時(shí)數(shù)據(jù)計(jì)算得到的結(jié)果相差不大。如果結(jié)果當(dāng)中x和y變化不大,而z值存在規(guī)律性變化,則需要進(jìn)行整體時(shí)移。具體表現(xiàn)為:如果遠(yuǎn)偏移距得到的深度小,近偏移距得到的深度大,說(shuō)明實(shí)際拾取的旅行時(shí)偏小,初至?xí)r間需要整體增加,反之則需要整體減小。
表3為共檢波點(diǎn)道集采用不同偏移距初至數(shù)據(jù)進(jìn)行二次定位計(jì)算的結(jié)果,由表可以看出,隨著偏移距的減小,二次定位結(jié)果在x和y方向變化不大(1m以?xún)?nèi)),在z方向卻呈現(xiàn)遞增趨勢(shì),且等效速度也呈現(xiàn)遞增趨勢(shì),由此可以判斷所拾取的初至旅行時(shí)比真實(shí)值偏小,旅行時(shí)需要進(jìn)行整體時(shí)移處理。
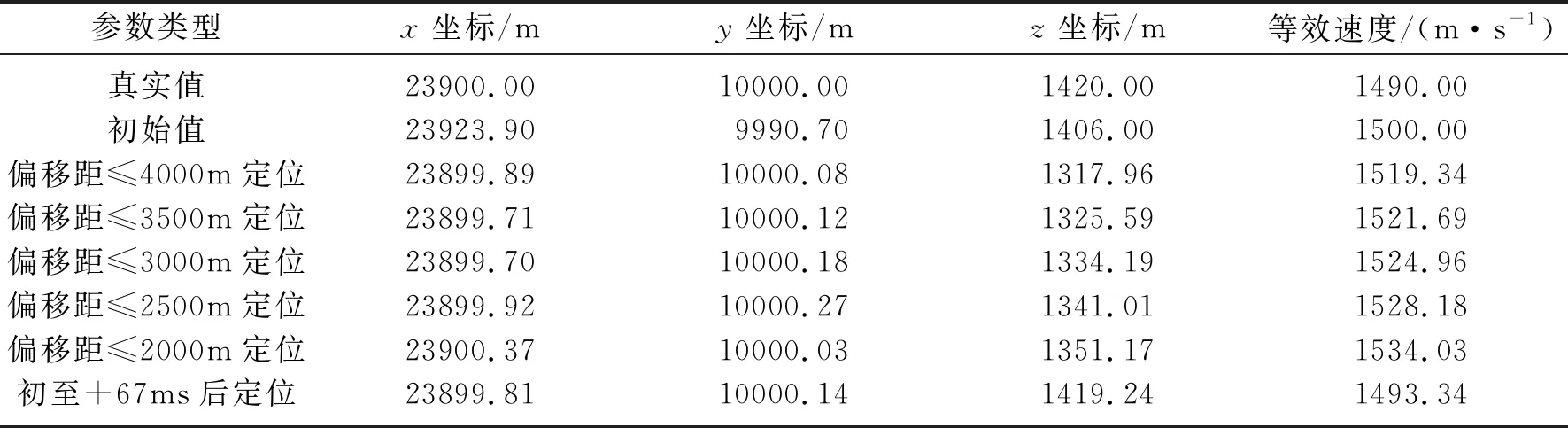
表3 旅行時(shí)存在系統(tǒng)性誤差時(shí)選用不同偏移距初至數(shù)據(jù)定位結(jié)果對(duì)比
系統(tǒng)性誤差的時(shí)移量可以在二次定位計(jì)算過(guò)程中求解,以減小人為給定造成的不確定性,具體實(shí)現(xiàn)方法如下。
假設(shè)對(duì)于同一個(gè)檢波點(diǎn),每一炮直達(dá)波旅行時(shí)都有一個(gè)固定的時(shí)移量Δt,根據(jù)已知的炮點(diǎn)位置、海水速度、直達(dá)波旅行時(shí),可以得到以下方程組
(1)
式中:(x,y,z)為檢波點(diǎn)坐標(biāo);(xi,yi,zi)為第i炮的炮點(diǎn)坐標(biāo);ti為拾取的第i炮的直達(dá)波旅行時(shí);n為炮點(diǎn)個(gè)數(shù);v為海水等效速度。寫(xiě)成統(tǒng)一的形式,有
fi(xi,yi,zi,v,Δt)=(x-xi)2+(y-yi)2+
(z-zi)2-v2(ti+Δt)2
(2)
問(wèn)題變?yōu)榍竽繕?biāo)函數(shù)fi(xi,yi,zi,v,Δt)的極小值。理想情況下,fi(xi,yi,zi,v,Δt)=0。該方程組是一個(gè)五元二次方程組,本文用牛頓法[20]求解。
對(duì)每個(gè)fi都在初值(x0,y0,z0,v0,Δt0)附近用Taylor級(jí)數(shù)展開(kāi),并取其線性部分,有
(3)
式中fi,0為fi在(x0,y0,z0,v0,Δt0)處的取值。寫(xiě)成矩陣形式為
(4)
其系數(shù)矩陣為Jacobi矩陣,各元素的取值為
(5)
式(4)為一個(gè)超定線性方程組,可用高斯消元法求解。
通過(guò)在二次定位計(jì)算過(guò)程中加入時(shí)移量這一變量,可求得系統(tǒng)性誤差時(shí)移量。最終反演的時(shí)移量為+67ms,二次定位的結(jié)果誤差在1m以?xún)?nèi),與真實(shí)值非常接近(表3)。
2 處理員質(zhì)量監(jiān)控
除了上述在計(jì)算過(guò)程中進(jìn)行二次定位的質(zhì)量監(jiān)控外,處理員還可以根據(jù)地震數(shù)據(jù)的其他特征評(píng)價(jià)結(jié)果的好壞,主要有兩種方法。
第一種方法是二次定位前、后分別對(duì)檢波點(diǎn)道集進(jìn)行雙曲動(dòng)校正,校正速度采用二次定位得到的等效速度進(jìn)行。如果直達(dá)波的時(shí)距曲線形態(tài)變得更加趨近于水平,則表明二次定位后坐標(biāo)更準(zhǔn)。對(duì)于二次定位前坐標(biāo)不準(zhǔn)導(dǎo)致直達(dá)波不平的原因有兩種:第一種是水平方向坐標(biāo)有較大誤差,此時(shí)根據(jù)偏移距排列的共檢波點(diǎn)道集直達(dá)波呈現(xiàn)參差不齊的形狀,如圖4a所示;第二種是水平方向誤差不大,而垂直方向有一定的誤差,此時(shí)主要表現(xiàn)為直達(dá)波的形態(tài)下拉或上翹,如圖5a所示。經(jīng)過(guò)二次定位之后,同樣會(huì)變得更加水平。
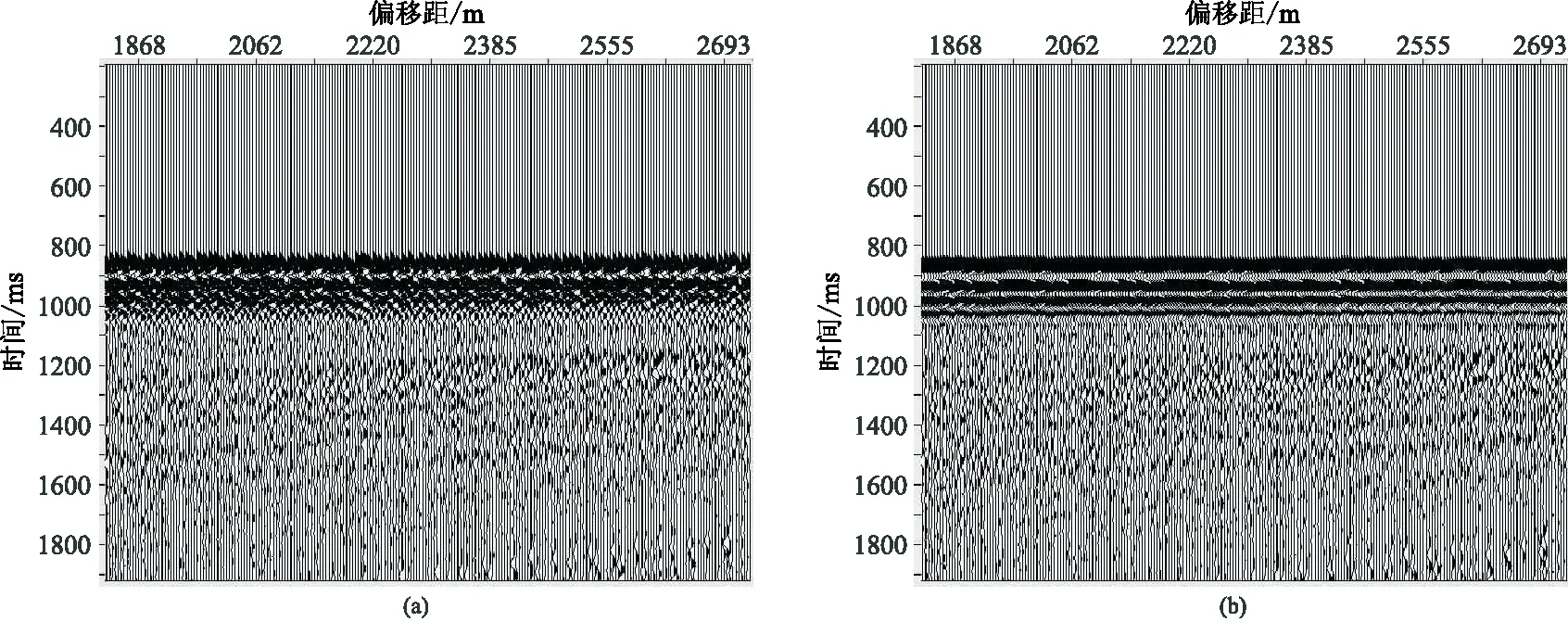
圖4 檢波點(diǎn)橫坐標(biāo)不準(zhǔn)時(shí)二次定位前(a)、后(b)的直達(dá)波形態(tài)(動(dòng)校正后)

圖5 檢波點(diǎn)z坐標(biāo)不準(zhǔn)時(shí)二次定位前(a)、后(b)的直達(dá)波形態(tài)(動(dòng)校正后)
第二種方法是根據(jù)旅行時(shí)擬合情況評(píng)價(jià)二次定位結(jié)果。理論上,如果直達(dá)波旅行時(shí)拾取準(zhǔn)確,且最終定位準(zhǔn)確的話,炮點(diǎn)到檢波點(diǎn)的理論直達(dá)波旅行時(shí)和實(shí)際拾取旅行時(shí)之差應(yīng)該為0。圖6為二次定位前、后各炮點(diǎn)到檢波點(diǎn)的旅行時(shí)誤差。在二次定位之前的理論旅行時(shí)與拾取旅行時(shí)之差分布在-30.35~17.48ms之間,其空間上的分布存在一定規(guī)律:左側(cè)偏上部分為負(fù)值,右側(cè)偏下部分為正值,其他區(qū)域在兩者之間漸變,可見(jiàn)當(dāng)前x坐標(biāo)值比真實(shí)值大,y坐標(biāo)值偏小。二次定位之后二者之差在-6.99~7.93ms之間,且空間上呈隨機(jī)分布。圖7為二次定位前、后旅行時(shí)誤差統(tǒng)計(jì),可見(jiàn)二次定位前旅行時(shí)誤差分布范圍較廣,在-30.35~17.48ms之間;二次定位之后旅行時(shí)誤差分布范圍變窄,在0值附近,與理論情況更為接近。
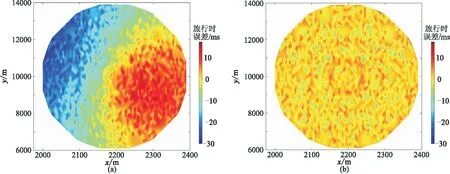
圖6 二次定位前(a)、后(b)旅行時(shí)誤差對(duì)比
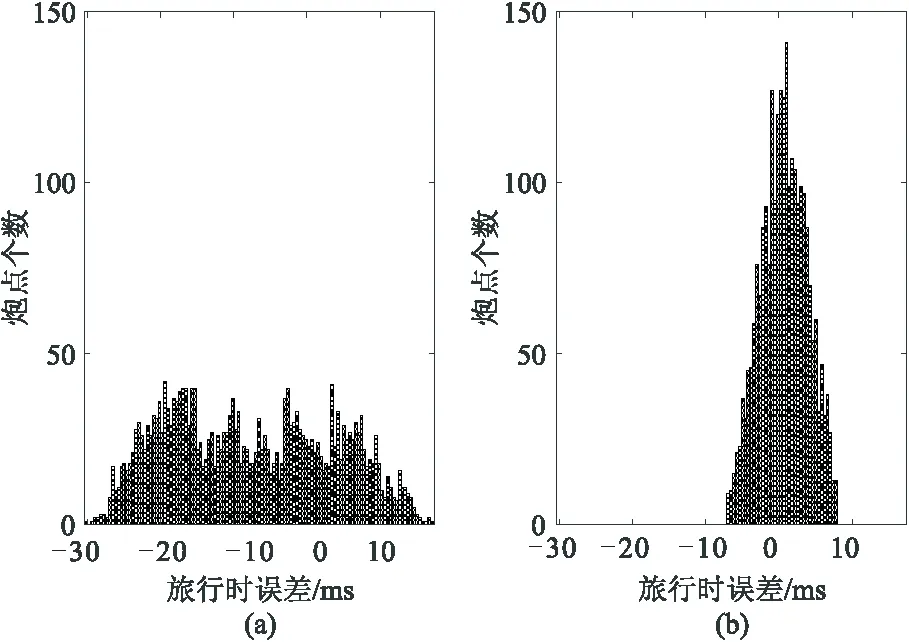
圖7 二次定位前(a)、后(b)旅行時(shí)誤差分布范圍統(tǒng)計(jì)直方圖
3 結(jié)論
(1)通過(guò)人工或自動(dòng)刪除初至旅行時(shí)拾取明顯錯(cuò)誤的部分信息,能夠大大提高OBN檢波點(diǎn)定位精度;
(2)選擇相對(duì)于OBN檢波點(diǎn)均勻?qū)ΨQ(chēng)的炮點(diǎn)進(jìn)行二次定位計(jì)算,能夠一定程度上提高抗旅行時(shí)誤差的能力,提高定位精度;
(3)判斷是否需要進(jìn)行旅行時(shí)的整體時(shí)移,對(duì)于準(zhǔn)確進(jìn)行檢波點(diǎn)深度方向的定位尤其重要;
(4)通過(guò)對(duì)比二次定位前、后共檢波點(diǎn)道集直達(dá)波雙曲動(dòng)校正后形態(tài)、旅行時(shí)誤差的空間分布、數(shù)理統(tǒng)計(jì)等,可以方便處理人員對(duì)二次定位進(jìn)行質(zhì)量監(jiān)控、結(jié)果評(píng)價(jià),以確保二次定位的精度。