基于指令濾波的機械臂有限時間輸出約束阻抗控制
2021-08-13 04:52:08李剛于金鵬劉加朋于海生
機械制造與自動化 2021年4期
李剛,于金鵬,劉加朋,于海生
(青島大學 自動化學院,青島 山東 266071)
0 引言
近年來,機械臂技術的應用愈發(fā)普及,其結構越發(fā)繁雜化、精密化。因此為確保該技術的安全性和合規(guī)性,迫切需要更高精度的力/位控制方法。機械臂力/位控制已經成為現(xiàn)今重要的科研方向。在這一領域,眾多學者作了大量研究,并給出多種控制方法,例如力/位混合控制[1]、阻抗控制[2]等。其中阻抗控制作為解決力/位控制問題的重要方法,具有抗干擾能力強、計算量相對較少以及易于機械臂進行力控制等優(yōu)點[3],受到廣泛關注。
運用于機械臂的阻抗控制技術發(fā)展迅速,HOGAN N首先提出了阻抗控制器的設計方法[4],使用阻抗控制理論來調節(jié)機器人末端執(zhí)行器與環(huán)境作用力之間的相互作用,但并未實現(xiàn)對力的精度控制。喬兵等通過在機械臂中添加力傳感器測得反饋力信號加以分析并與阻抗控制技術結合[5],成功提高了對機械臂末端與未知環(huán)境表面接觸時接觸力的控制精度;姜力等通過在阻抗控制的基礎上加入模糊自適應控制技術,實現(xiàn)了在控制過程中通過模糊自適應技術[6]持續(xù)調整阻抗參數(shù),測試可實現(xiàn)最優(yōu)控制的阻抗參數(shù)以產生更優(yōu)秀的控制表現(xiàn),并將滑模位置控制作為內環(huán),提高了系統(tǒng)的魯棒性[7];LI P等提出利用模糊自適應技術逼近未知的機械臂系統(tǒng)模型參數(shù),并進行阻抗控制器的設計,此技術可以取得較好的力/位控制效果[8],但在某些實際應用中,必須實現(xiàn)快速跟蹤控制,上述方法往往不能滿足條件。
為解決此問題,XUE C Q等將有限時間控制技術加入模糊自適應阻抗控制中,使機械臂系統(tǒng)在有限時間內系統(tǒng)輸出信號趨于期望信號,在加快響應速度的同時極大地提升了系統(tǒng)的動態(tài)性能[9]。有限時間控制方法具有整定時間短、抗干擾能力強等優(yōu)點,在實際應用中得到廣泛應用。與非有限時間控制器相比,運用了有限時間控制技術的控制器能實現(xiàn)更優(yōu)秀的魯棒性和抗干擾性[10]。但是機械臂在未知或復雜環(huán)境中運行時,必須保證機械臂輸出狀態(tài)都限制在給定的有界區(qū)間內,否則有可能使機械臂受損,文獻[9]所提出的機械臂控制方法并不能保證機械臂工作過程中的輸出約束在有限區(qū)間內。
上述方法均采用反步法進行控制器設計,但在使用反步法設計控制器的過程中,虛擬控制律的反復求導提高了計算復雜性。為解決這個問題,本文引入了指令濾波誤差補償技術[11],該技術通過補償信號解決濾波誤差問題,并降低控制器設計的復雜性。基于以上問題,本文將障礙 Lyapunov函數(shù)[12-15]以及有限時間控制方法與阻抗控制方法結合,提出了應用于機械臂的有限時間輸出約束模糊自適應阻抗控制。
最后,由仿真結果證明了本文所設計的機械臂系統(tǒng)控制器的可行性及有效性。
1 機械臂數(shù)學模型及初步變換
機械臂動力學方程[15]如下:
(1)

機械臂的運動學方程[16]如下:

通過以上關系式轉換,可得
(2)
其中:x∈Rm×1是笛卡兒坐標系中機械臂末端的坐標,m是機械臂運動空間的維度;q∈Rn×1是機械臂各關節(jié)的角度。
機械臂末端位置與末端力的阻抗控制關系式[17]
(3)
其中:E=xd-x,xd是命令軌跡;Md是機械臂期望慣性矩陣;Bd是機械臂期望阻尼矩陣;Kd是機械臂期望剛性矩陣。當機械臂末端在自由空間中運動時,F(xiàn)e=0。
如果x精確地跟蹤期望軌跡xr∈Rm×1,式(3)可以被寫成下式
(4)
由式(4)中可以得知,若xd、Md、Bd、Kd已知,則可通過式(4)求出期望軌跡xr。
將式(2)帶入式(1)可得
(5)
式中:
為了方便表示,重新定義新的變量為:
(6)
當機械臂在未知受限空間中工作時,機械臂的輸出狀態(tài)都應被限制在緊集Ωx內,其中Ωx={|x1i|≤kci,i=1,…,m},kci為正常數(shù)。控制目標是設計控制率τx使x1跟蹤期望軌跡xr,同時,使機械臂控制系統(tǒng)的輸出狀態(tài)始終在給定的緊集Ωx中。
引理1[18-19]對于任意實數(shù)λ1>0,λ2>0以及0<γ<1,則有限時間穩(wěn)定的擴展Lyapunov條件為
當滿足上式時,系統(tǒng)半全局有限時間狀態(tài)是穩(wěn)定的。系統(tǒng)的收斂時間Ts可估計為

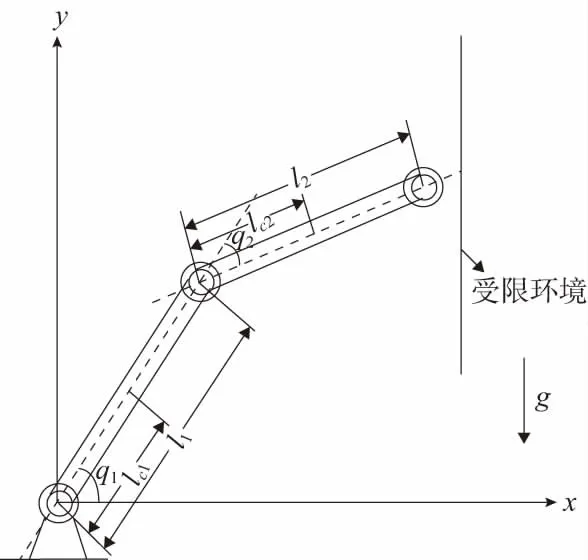
引理2[20]對于xi∈R,i=1,2,…,n,0 引理3[11]有限時間指令濾波形式為: 根據(jù)反步法原理定義誤差變量如下: z1=x1-xr,z2=x2-x1,c。 其中:xr為期望軌跡;x1,c為指令濾波器的輸出信號。定義濾波誤差補償信號為ξi=zi-vi,i=1,2。 步驟1:選擇第一個子系統(tǒng)的障礙Lyapunov函數(shù)如下: (7) (8) 選取虛擬控制律α1和補償信號ξ1, 即 (9) (10) K1=diag[k11,…,k1m];H1=diag[h11,…,h1m]; L1=diag[l11,…,l1m]均為正定矩陣。 將式(9)、式(10)帶入式(8)可得 (11) 步驟2:選取第二個子系統(tǒng)的Lyapunov函數(shù)如下: (12) 對V2求導可得 (13) (14) 其中l(wèi)為一個>0的常數(shù)。 (15) (16) (17) Fe+Gx+Cxx2 (18) 由引理2可以得出 (19) 將式(15)-式(19)帶入式(13),可得 (20) 由楊氏不等式可知 (21) (22) (23) 將式(21)-式(23)帶入式(20),可得 (24) 綜合上述兩式,可得 (25) 以下結論已經被證明[14]: 當滿足條件|v1i|≤kai,0<γ≤1時,下列不等式成立: (26) 將式(25)及式(26)代入式(24),可得 (27) 其中: 將式(27)改寫為 (28) 由v1=z1-ξ1可知|z1i|≤|v1i|+|ξ1i|≤kai+?。同理,因為z1=x1-xr,可知|x1|≤|z1|+|xr|≤kai+?+Y0=kc1。根據(jù)以上分析,機械臂系統(tǒng)的輸出狀態(tài)變量x被約束于緊集Ωx內,保證了機械臂的有限時間輸出約束。 為了驗證本文控制方案的有效性,以圖1所示的垂直平面上的二自由度機械臂作為實驗對象,機械臂工作在受限空間中,在x=0.8處有一面墻壁。 圖1 二自由度機械臂機械模型 使用MATLAB對本文所提出的控制方法進行仿真分析。將本文所提出的有限時間輸出約束阻抗控制(FTOCIC)方法與未考慮有限時間控制和輸出狀態(tài)約束的模糊自適應指令濾波阻抗控制方法進行仿真比較, 由式(6)可知仿真實驗的旋轉關節(jié)二自由度機械臂系統(tǒng)模型為: 其中x1=[x1,1、x1,2]T,x1,1、x1,2分別表示二自由度機械臂末端在笛卡兒坐標系x、y軸上的位置。 D(q)= 其中:qi表示機械臂的第i關節(jié)角度;mi和li分別為機械臂的第i節(jié)連桿的質量和長度;lci為機械臂的第i-1關節(jié)到i節(jié)連桿質心的距離;Ii為關節(jié)i基于坐標軸穿過關節(jié)的質心的轉動慣量(i=1,2)。 二自由度機械臂的參數(shù)見表1。機械臂初始參數(shù)為x1=[0.502,0.702]T,x2=[0,0]T,濾波補償信號的初始值為ξ1=[0,0]T,ξ2=[0,0]T。 表1 二自由度機械臂參數(shù) [sin(t)cos(t)+sin(t)+0.5,2sin(t)cos(t)+cos(t)+1]T。 選擇t∈[0,20]。 對于二自由度機械臂模糊自適應指令濾波阻抗控制法,控制規(guī)律選取k1=20,k2=560,r=1,l=1,σ=0.1。 對于二自由度機械臂模糊自適應有限時間輸出約束指令濾波阻抗控制法,控制參數(shù)選取K1=diag[20,20],H1=diag[0.1,0.1],H2=2,L1=diag[0.01,0.01],L2=2,K2=560,ka=[0.005,0.005]T,r=1,l=1,σ=0.1,γ=0.6,R1=20,R2=0.6。 該二自由度機械臂的期待阻抗參數(shù)為Md=2I,Bd=diag[20,20],Kd=diag[50,50],模糊邏輯系統(tǒng)選擇模糊集為 Sj(z)=exp[(zj+s)/4] 其中:j=1,2,3,4;s=-3,-2,-1,0,1,2,3。 仿真結果如圖2-圖5所示。圖2是本文提出的控制方法與對比控制方法機械臂末端位置跟蹤曲線圖以及外界環(huán)境對機械臂末端施加接觸力曲線圖。由圖2可知本文所提控制方法可有效使機械臂末端跟蹤期望軌跡。圖3是本文提出控制方法與對比控制方法的跟蹤誤差比較圖以及誤差變量v1變化曲線比較圖。由圖3可知,本文所提控制方法有效地提高了系統(tǒng)的響應速度,減小位置跟蹤誤差,并且使誤差變量v1始終位于給定有界區(qū)間內。圖4為本文提出的控制方法與對比控制方法的機械臂末端速度跟蹤誤差比較圖以及誤差變量v2變化曲線比較圖。圖5為本文提出的控制方法與對比控制方法的真實控制律τx的曲線圖。 圖2 機械臂末端位置與接觸力 圖3 跟蹤誤差z1與誤差變量v1 圖4 跟蹤誤差z2與誤差變量v2 圖5 控制輸入τx 針對機械臂系統(tǒng)在受限空間中的跟蹤控制問題,本文提出的基于指令濾波的有限時間輸出約束模糊自適應阻抗控制方法,實現(xiàn)了對期望軌跡的有效跟蹤控制,并且使機械臂輸出狀態(tài)都限制在預定義的約束空間中,具有更快的響應速度和更小的跟蹤誤差。本文所提控制方法與現(xiàn)有控制方法相比,能實現(xiàn)更少的響應時間以及更好的跟蹤效果,將機械臂輸出約束于給定的有界區(qū)間之中,保證了機械臂運行過程中的安全性。仿真實驗的結果對比驗證了本文所提控制方法的有效性。



2 有限時間模糊自適應輸出約束反步控制器設計





3 穩(wěn)定性證明



4 仿真結果分析







5 結語
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
當代工人(2020年8期)2020-05-25 09:07:38
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
