WWW型雙輸入行星減速器傳動系統(tǒng)振動特性研究
2021-08-13 04:26:22張寬張慶
機械制造與自動化 2021年4期
張寬,張慶
(南京理工大學 機械工程學院, 江蘇 南京 210094)
0 引言
減速器作為航天航空飛行器伺服傳動系統(tǒng)關鍵部件之一,其在工作時產(chǎn)生的振動會嚴重影響傳動系統(tǒng)的精度以及減速器的壽命。沈稼耕等人研究了兩組不同嚙合相位的行星齒輪傳動系統(tǒng)對人字齒行星齒輪傳動系統(tǒng)振動特性的影響[1];劉凱文等人利用剛柔耦合模型對NGW型行星齒輪減速器傳動系統(tǒng)進行振動特性分析[2]。本文利用理論法和有限元法分別計算行星齒輪傳動系統(tǒng)固有頻率,并與影響激勵頻率對比分析,驗證了振動特性對減速器的重要性,為減速器避開共振頻率提供參考依據(jù)。
1 WWW型雙輸入行星減速器的結構及工作原理
航天伺服雙輸入差速裝置常選用結構簡單的2K-H型輪系。圓柱齒輪2K-H型輪系按結構分類主要有NGW型、NW型、NN型、WW型。前3種結構都包含有內齒輪,而小尺寸硬齒面精密內齒輪加工困難,限制了這類行星輪系在高轉速、高精度傳動場合的應用。WW型輪系都是由外嚙合齒輪組成,小模數(shù)外齒輪可磨齒加工,獲得較高精度的硬齒面齒輪,但WW型差速輪系是正號機構,傳動效率低,傳動比大時甚至發(fā)生自鎖,不適合用做動力傳動。因此在WW型差速輪系的基礎上構建新型WWW型的外嚙合圓柱齒輪差動輪系,既便于磨齒加工獲得高精度,又具有高的傳動效率,適用于動力傳動。
利用CAXA軟件繪制WWW型雙輸入行星減速器的機構及裝配簡圖如圖1所示。減速器由1個WWW型2K-H負號差動輪系和1個定軸輪系組合而成。齒輪軸1和齒輪軸6為兩輸入軸,齒輪1和齒輪2 為太陽輪,齒輪3、齒輪4為行星輪,行星架H為輸出軸。齒輪2、齒輪5、齒輪6組成定軸齒輪傳動。齒輪1、齒輪4、齒輪3、齒輪2和行星架H組成兩自由度的行星齒輪傳動,該行星齒輪傳動均為外嚙合。正常工作時,由齒輪軸1和齒輪軸6同時輸入動力源,轉換后傳動比為2.5;當電機1故障時,齒輪軸1制動,只有齒輪軸6作為輸入源,轉換傳動比為5;電機2故障時同理可保證傳動比為5。

圖1 WWW型行星減速器的機構及裝配簡圖

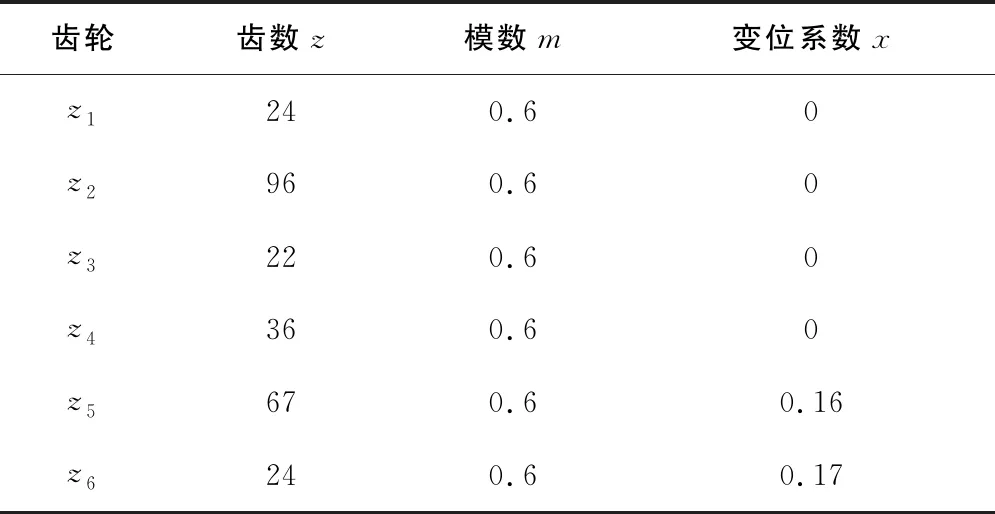
表1 各齒輪參數(shù)
利用三維建模軟件CREO,建立各構件的三維模型并進行模型的虛擬裝配,裝配三維圖如圖2所示。

圖2 三維裝配模型
2 行星減速器傳動系統(tǒng)數(shù)學建模
WWW型雙輸入行星減速器的齒輪傳動系統(tǒng)由差動輪系和定軸輪系兩部分組成。定軸輪系中齒輪轉動時軸線位置固定,適宜采用固定坐標系建立振動數(shù)學模型。差動輪系中行星齒輪在繞中心輪轉動的同時還會繞自身中心軸線自轉,齒輪在嚙合傳動時坐標系是變化的,所以行星齒輪3和齒輪4應該采用動坐標系建立振動數(shù)學模型。基于行星架建立差動輪系的動坐標系,并以行星齒輪的中心位置為動坐標原點可得差動輪系端面動力學模型示意圖,如圖3所示。

圖3 差動輪系端面動力學模型示意圖
如圖3所示,首先選擇行星架、中心輪1和中心輪2共同的回轉中心O為原點,建立它們各自的動坐標系,分別表示為{xH,yH,zH}、{x1,y1,z1}、{x2,y2,z2};各坐標系均以ωH的角速度隨行星架和中心輪中心轉動;接著以行星輪回轉中心為動坐標系中心建立兩組行星輪的動坐標系,行星齒輪3的動坐標系為{xpi,ypi,zpi},其中i=1,2,3,4;行星齒輪4的動坐標系為{xqi,yqi,zqi},其中i=1,2,3,4,兩組行星齒輪的動坐標系均以ωH的角速度隨行星架轉動。因為第i個行星輪中心與行星架中心的連線和行星架動坐標系沿xH軸的夾角為Φi,Φi=2π(i-1)/4,所以行星齒輪3中動坐標系各軸方向可以進行定義,xpi軸沿夾角Φi正方向向外,ypi軸垂直于夾角方向并與行星架轉向相同,zpi軸由行星輪中心垂直指向外,行星齒輪4坐標軸定義同理可得。對于定軸輪系,采用定坐標系為{xj,yj,zj},其中j=2,5,6,分別表示齒輪2、齒輪5和齒輪6。最后各構件沿橫向振動的微位移用xn、yn表示,沿軸向振動的微位移用zn表示,扭轉振動的微位移用un表示,其中n=1,2,…,5,6,H。
在對減速器傳動系統(tǒng)模型進行動力學分析時,為了簡化模型,方便計算,進行了以下假設:1)采用集中質量法,將嚙合輪齒和軸承支撐簡化為彈簧,將齒輪和行星架等構件視作集中剛體質量塊;2)忽略齒側間隙、綜合誤差和輪齒間的相互滑動及摩擦的影響;3)系統(tǒng)只需建立無阻尼自由振動方程,故忽略阻尼的影響;4)兩組行星齒輪中每個齒輪的質量、結構、轉動慣量和嚙合剛度等完全一致。
2.1 傳動系統(tǒng)相對位移分析
1)行星輪系彈性形變分析
假設中心輪指向行星輪的方向為嚙合線正方向,根據(jù)圖3中差動輪系端面動力學模型示意圖進行齒輪端面嚙合角、嚙合剛度和支撐剛度的定義,αt14為中心輪1與行星輪4的端面嚙合角,αt43為行星輪4與行星輪3的端面嚙合角,αt23為中心輪2與行星輪3的端面嚙合角;k14為中心輪1與行星輪4的嚙合剛度,k43為行星輪4和行星輪3嚙合剛度,k23為中心輪2與行星輪3的嚙合剛度;k1、k2、k3、k4分別為中心輪和行星輪的支撐剛度。利用定義好的齒輪參數(shù)進行簡單的數(shù)學計算可得各傳動構件的彈性形變如下:
中心輪1相對行星輪4的位移沿嚙合線方向投影為
δ1,qi=u1-uqi+x1sin(αt14-Φi)-xqisinαt14+
y1cos(αt14-Φi)-yqicosαt14;
中心輪2相對行星輪3的位移沿嚙合線方向投影為
δ2,pi=u2-upi+x2sin(αt23-Φi)-xpisinαt23+
y2cos(αt23-Φi)-ypicosαt23;
行星輪3相對行星輪4的位移沿嚙合線方向投影為
δqi,pi=uqi-upi+xqisinαt43-xpisinαt43+yqicosαt43-ypicosαt43;
行星架H相對行星輪3的相對位移和扭轉位移在行星架坐標系上的投影為
行星架H相對行星輪4的相對位移和扭轉位移在行星架坐標系上的投影為
2)定軸輪系彈性形變分析
圖4為定軸傳動部分端面動力學模型示意圖。圖中α25為齒輪2與齒輪5的嚙合角,α56為齒輪5與齒輪6的嚙合角;k25為齒輪2與齒輪5的嚙合剛度,k56為齒輪5與齒輪6的嚙合剛度;k2、k5、k6分別為齒輪2、齒輪5、齒輪6的支撐剛度。

圖4 定軸輪系端面動力學模型示意圖
齒輪5相對齒輪2的位移沿嚙合線方向的投影為
δ5,2=u5-u2+x5sinα25-x2sinα25-y5cosα25+y2cosα25;
齒輪6相對齒輪5的位移沿嚙合線方向的投影為
δ6,5=u6-u5+x6sinα56-x5sinα56+y6cosα56-y5cosα56。
2.2 傳動系統(tǒng)動力學微分方程
定義齒輪1,2,…,6和行星架H的質量分別為m1,m2,…,m6,mH;齒輪1和齒輪6的基圓半徑分別為rb1和rb6;在齒輪1和齒輪6上的輸入轉矩為T1、T6,行星架負載轉矩為TH。將各傳動構件的彈性形變代入牛頓第二運動定律,可得到各構件的動力學微分方程。
中心輪1的動力學微分方程為:
第i個行星輪4的動力學微分方程為:
第i個行星輪3的動力學微分方程為:
行星架H的動力學微分方程為:
中心輪2的動力學微分方程為:
齒輪5的動力學微分方程為:
齒輪6的動力學微分方程為:
3 行星減速器振動特性分析
3.1 齒輪傳統(tǒng)系統(tǒng)嚙合剛度和支撐剛度的確定
行星減速器工作時,傳動系統(tǒng)齒輪嚙合過程中嚙合齒數(shù)是呈周期性變化的,輪齒承受載荷也是周期性變化的。所以嚙合剛度也是隨時間變化而周期性變化的,即嚙合剛度是時變剛度。時變嚙合剛度的計算方法主要有理論計算方法,如材料力學法和彈性力學法[3];數(shù)值計算方法如有限元法、邊界元法和回歸法,其中材料力學法應用較早也較廣泛,典型方法有石川公式和威伯-班納斯切克公式[4]。為了簡化計算,本型行星減速器使用平均嚙合剛度代替時變嚙合剛度。平均嚙合剛度表示1mm齒寬上的剛度,再將其轉換成齒輪對嚙合齒寬上的嚙合剛度k,利用石川公式計算平均嚙合剛度[5]。石川公式計算過程如下:
cγ=(0.75εα+0.25)c′
k=106·cγ·b
式中:εα為端面重合度;c′為單對齒嚙合剛度;cγ為1mm齒寬上產(chǎn)生的平均嚙合剛度,N·mm-1·μm-1;b為接觸齒寬,k為接觸齒寬上產(chǎn)生的平均嚙合剛度,N/m,計算結果見表2。

表2 齒輪對嚙合剛度
WWW型雙輸入行星減速器,所有軸承均為深溝球軸承。為了簡化計算,根據(jù)文獻和經(jīng)驗公式直接選取,取軸承徑向支撐剛度為1×108N/m,軸向支撐剛度為1×107N/m。
3.2 傳動系統(tǒng)固有振動特性分析
固有頻率是系統(tǒng)的物理特性,與其所受到的外部載荷無關。在忽略傳動系統(tǒng)的外部載荷與阻尼影響的情況下,建立WWW型行星齒輪傳動系統(tǒng)的自由振動微分方程

式中:M為傳動系統(tǒng)的質量矩陣;X為傳動系統(tǒng)的廣義坐標列陣;K為傳動系統(tǒng)的總剛度,包括嚙合剛度和支撐剛度。
自由振動微分方程對應的特征值問題
式中:ωi和φi分別為第i階固有圓頻率和振型矢量,i=1,p1,…,6,H。
進一步得出系統(tǒng)第i階固有頻率為
fi=ωi/2π
代入傳動系統(tǒng)齒輪基本參數(shù),求出的質量矩陣和剛度矩陣為52階矩陣,借助MATLAB軟件編程對特征值求解,利用eig函數(shù)求出矩陣的全部特征值,程序如下(程序中略去了剛度矩陣和質量矩陣的輸入):
E=eig(inv(M)*K);
E1=sqrt(E);
f1=E1./(2*pi);
[s,f2]=sort(T1);
運行程序可以得到的所有特征值,這些特征值即為傳動系統(tǒng)各階的固有頻率。
由MATLAB軟件的計算結果可得,WWW型行星齒輪減速器傳動系統(tǒng)的最低固有頻率為1 848Hz,所以只有當影響激勵接近或者達到1 848Hz時,才會引起減速器傳動系統(tǒng)共振。相關技術要求給減速器的最高轉速為6 100r/min,通過最高旋轉頻率計算公式可得最高轉速下的最高旋轉頻率為101.67Hz。
根據(jù)最高嚙合頻率計算公式,選定軸輪系可得最高轉速下的最高嚙合頻率為2 440Hz。
最高旋轉頻率和最高嚙合頻率都遠離理論方法計算的傳動系統(tǒng)最低固有頻率1 848Hz,所以不會引起減速器共振。通過分析傳動系統(tǒng)的固有振動特性,可為減速器工作時避開共振頻率提供依據(jù)。
4 基于有限元的減速器傳動系統(tǒng)模態(tài)分析
有限元模態(tài)分析是通過有限元法計算得出結構部件特定的固有頻率、阻尼比和模態(tài)振型的過程。其分析過程是將線性定常系統(tǒng)的自由振動解耦成N個正交的單自由度振動系統(tǒng)[6]。在利用經(jīng)典的線性理論方法對齒輪傳動系統(tǒng)進行固有頻率求解時,理想化了一些諸如齒側間隙、摩擦、阻尼影響以及齒輪嚙合時剛度矩陣的時變問題等。然而借助有限元模態(tài)分析則可以方便地解出復雜系統(tǒng)的非線性模態(tài)。本文利用有限元軟件ANSYS Workbench 對減速器齒輪傳動系統(tǒng)進行有限元模態(tài)分析,計算出各階固有頻率和模態(tài)振型。
首先在Pro/E中建立齒輪傳動系統(tǒng)的簡化三維模型,然后將簡化后的三維模型以stp格式導入到ANSYS Workbench中的Modal模塊;接著定義材料屬性:密度為7 800 kg/m3,彈性模量為207 GPa,泊松比為0.29,并按照程序對傳動系統(tǒng)模型進行智能網(wǎng)格劃分;然后定義約束:在各對嚙合齒輪之間定義接觸,接觸類型為無摩擦Frictionless Support,在各轉動件添加圓柱支撐Cylindrical Support,除行星輪約束軸向位移之外,其他轉動件約束徑向位移和軸向位移。最后求解出傳動系統(tǒng)前6階固有頻率和模態(tài)振型。
傳動系統(tǒng)的前6階固有頻率如表3所示。

表3 傳動系統(tǒng)前6階固有頻率
傳動系統(tǒng)的前6階固有頻率對應的模態(tài)振型如圖5所示。
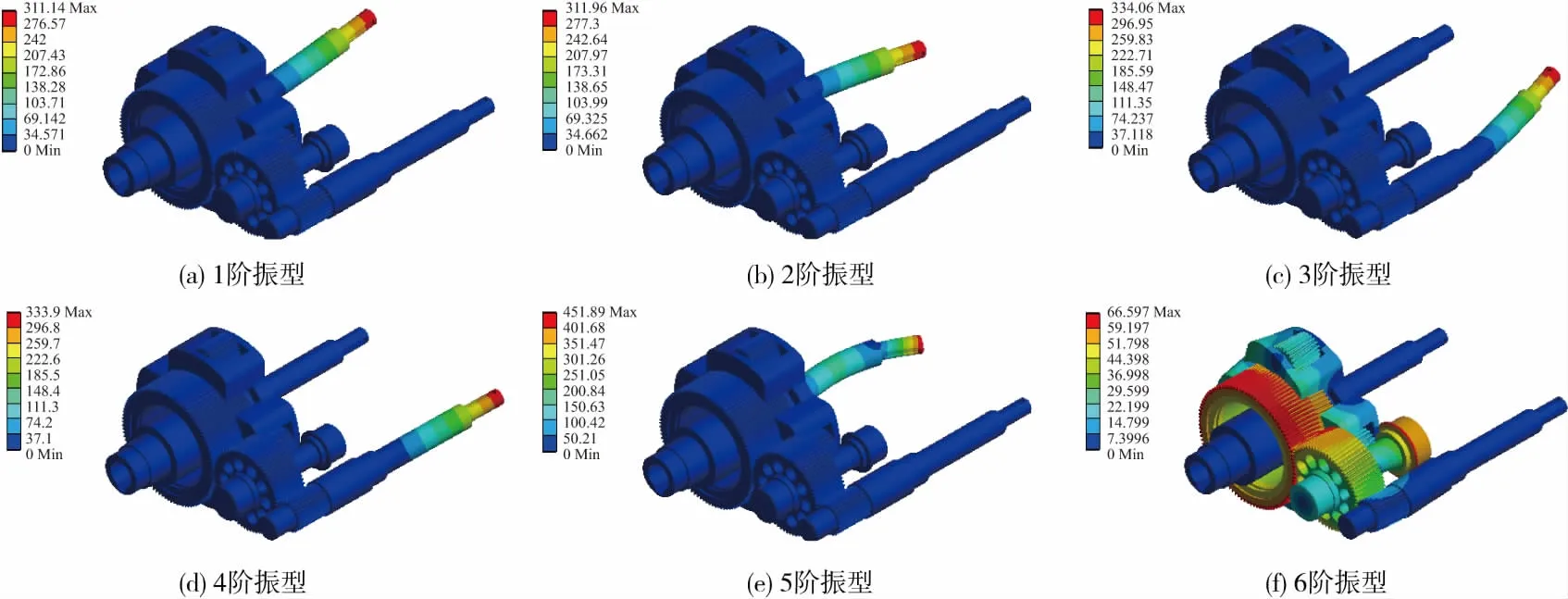
圖5 傳動系統(tǒng)前6階模態(tài)振型圖
基于有限元ANSYS Workbench計算出減速器齒輪傳動系統(tǒng)的最低固有頻率為1 865.1Hz,當影響激勵接近或達到1 865.1Hz時傳動系統(tǒng)會發(fā)生共振,造成齒輪損壞。已知輸入最大轉速6 100r/min,即減速器的最大旋轉頻率為101.67Hz,傳動系統(tǒng)最大嚙合頻率為2 440Hz,都遠離傳動系統(tǒng)的最低固有頻率,所以減速器傳動系統(tǒng)不會發(fā)生共振。
5 結語
根據(jù)某航天飛行器的技術要求,設計出滿足需求的高性能WWW型雙輸入行星減速器;利用理論計算方法和有限元模態(tài)分析法對減速器齒輪傳動系統(tǒng)進行振動特性分析,結果驗證了減速器影響激勵不會引起傳動系統(tǒng)的共振。
理論計算時,由于建立的齒輪傳動系統(tǒng)模型忽略齒輪和行星架自身彈性變形,忽略阻尼和摩擦因素的影響以及簡單化齒輪嚙合剛度時變性等因素,因此理論計算的固有頻率與減速器傳動系統(tǒng)實際固有頻率存在一定偏差。但理論計算出的固有頻率已經(jīng)遠離了傳動系統(tǒng)影響激勵引發(fā)的頻率。
基于有限元模態(tài)分析,能夠準確有效地計算出非線性復雜系統(tǒng)的固有振動特性,相對于傳統(tǒng)理論計算法更加準確,且有限元模態(tài)分析的固有頻率結果與理論計算的結果接近,由此驗證了利用理論法計算的齒輪傳動系統(tǒng)動力學微分方程的正確性,同時為減速器避免共振提供了重要的參考數(shù)據(jù)。由于研究時間和資源有限,只對靜態(tài)狀況下減速器傳動系統(tǒng)部分做了振動特性分析,對于減速器傳動系統(tǒng)帶有實際載荷及轉速的預應力振動特性分析需要在今后工作中逐步完成。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
